
Spacecraft Solar Arrays Degradation Forecasting with Evolutionary
Designed ANN-based Predictors
Maria Semenkina, Shakhnaz Akhmedova, Eugene Semenkin and Ivan Ryzhikov
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University,
Krasnoyarskiy Rabochiy ave., 31, Krasnoyarsk, 660014, Russia
Keywords: Spacecraft Solar Array, Degradation Forecasting, ANN-based Predictors, Automated Design,
Self-configuring Evolutionary Algorithms, Bio-Inspired Algorithms Co-operation.
Abstract: The problem of forecasting the degradation of spacecraft solar arrays is considered. The application of
ANN-based predictors is proposed and their automated design with self-adaptive evolutionary and bio-
inspired algorithms is suggested. The adaptation of evolutionary algorithms is implemented on the base of
the algorithms’ self-configuration. The island model for the bio-inspired algorithms cooperation is used. The
performance of four developed algorithms for automated design of ANN-based predictors is estimated on
real-world data and the most perspective approach is determined.
1 INTRODUCTION
The future lies in the development of alternative
energy sources such as solar arrays (SA). However,
the efficiency of their application in systems of outer
space assignment strongly depends on the
environmental influence that results in their
degradation. The testing of ground-based solar
panels is an expensive and time-consuming
procedure, therefore the use of forecast tools for the
degradation of solar panels can significantly
improve the process of SA implementation.
Artificial neural networks (ANN) are often used
for prediction problems solving because of their
generalization ability (Zhang, 1998). However, the
efficiency of ANN-based predictors essentially
depends on the choice of an effective ANN structure
and the successful tuning of weight coefficients.
Different types of evolutionary algorithms (EA) as
well as so called bio-inspired approaches are often
used for both tasks. In this paper we use proven Self-
Configuring Evolutionary Algorithms (SelfCEA)
(Semenkin, 2012) and Co-Operation of Biology
Related Algorithms (COBRA) (Akhmedova, 2013)
for the automated design of ANN-based predictors.
The rest of the paper is organized as follows: in
Section 2 the problem description is given, in
Section 3 we give some information on optimization
techniques, in Section 4 approaches for the
automated design of neural networks are described,
in Section 5 we consider the outcomes of numerical
experiments, and in the last section some
conclusions and directions of further investigations
are presented.
2 PROBLEM DESCRIPTION
It is necessary to develop a mathematical model for
predicting solar array degradation according to
available SA parameter changes measured together
with the corresponding parameters of solar activity
during the fulfilment of the real spacecraft’s
mission.
The model is adjusted to determine the electrical
characteristics of solar panels based on the following
environment factors:
• integral fluence of protons with energies less
than 1 МеV;
• integral fluence of protons with energies less
than 10 МеV;
• integral fluence of protons with energies less
than 100 МеV;
• integral fluence of electrons with energies less
than 0,6 МеV;
• integral fluence of electrons with energies less
than 2 МеV;
421
Semenkina M., Akhmedova S., Semenkin E. and Ryzhikov I..
Spacecraft Solar Arrays Degradation Forecasting with Evolutionary Designed ANN-based Predictors.
DOI: 10.5220/0005122004210428
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 421-428
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

• the parameter defined as the number of days
since the spacecraft separation that characterizes
the SA damage by meteoritic bodies and UV
radiation;
• the parameter that characterizes the degree of
spacecraft solar illumination.
We pose the following output parameters:
• open circuit voltage of the solar battery Ucv
(open circuit voltage);
• current intensity of solar panel Isc (amperage
short circuit)
for both sections of the spacecraft’s SA, i.e. four
output parameters are considered.
So it is necessary to design the SA degradation
predictor based on the flight data. We will design it
automatically in the form of an artificial neural
network. For this aim, we will use the specific
optimization approach that allows an automated
choice of ANN structure and adjustment of weight
coefficients.
3 SELF-ADAPTING
OPTIMIZATION TECHNIQUES
Evolutionary and bio-inspired algorithms are well
known and often used techniques for complicated
optimization problem solving. However, their
performance essentially depends on the choice of the
algorithm settings and adjustment of parameters. It
prevents the wide use of algorithms by end users
who are not experts in stochastic optimization, e.g.
aerospace engineers. Below we consider two
approaches to the automated choice of the
appropriate algorithmic scheme: co-evolution and
self-configuration.
3.1 Co-Operation of Biology Related
Algorithms (COBRA)
Five well-known optimization methods such as the
Particle Swarm Optimization Algorithm (PSO)
(Kennedy, 1995), the Wolf Pack Search Algorithm
(WPS) (Yang, 2007), the Firefly Algorithm (FFA)
(Yang, 2009), the Cuckoo Search Algorithm (CSA)
(Yang, 2009) and the Bat Algorithm (BA) (Yang,
2010) are combined in one meta-heuristic called Co-
Operation of Biology Related Algorithms (COBRA)
(Akhmedova, 2013). These biology related
optimization approaches work with continuous
variables. It is impossible to say in advance which of
the above-listed algorithms is the best one or which
algorithm should be used for solving the given
optimization problem (Akhmedova, 2013). This was
the main reason for the development of a new meta-
heuristic. At the same time these algorithms are very
similar. The idea is the use of the cooperation of
these algorithms instead of any attempts to decide
which one is the best for the current problem in
hand.
The following proposed approach is that five
populations are generated (one population for each
algorithm) which are then executed in parallel
cooperating with each other. It is not required to
choose the population size for each algorithm
because the proposed algorithm is a self-tuning
meta-heuristic. The number of individuals in each
algorithm’s population can increase or decrease
depending on the increasing or decreasing of the
fitness value. If the fitness value has not improved
during a given number of generations, then the size
of all populations increases. And vice versa, if the
fitness value has constantly improved, then the size
of all populations decreases. Besides, each
population can “grow” by accepting individuals
removed from other populations. A population
“grows” only if its average fitness is better than the
average fitness of all other populations. The result of
this kind of competition allows us to provide the
biggest resource (population size) to the most
appropriate (in the current generation) algorithm.
This property can be very useful in the case of a hard
optimization problem when, as it is known, there is
no single best algorithm at all stages of the
optimization process execution (Eiben, 2003).
One of the most important driving forces of this
meta-heuristic is the migration operator that creates
a cooperation environment for component
algorithms. All populations exchange individuals in
such a way that a part of the worst individuals of
each population is replaced by the best individuals
of other populations. It brings up-to-date information
on the best achievements to all component
algorithms and prevents their preliminary
convergence to its own local optimum that improves
the group performance of all algorithms.
The performance of the proposed algorithm was
evaluated on the set of benchmark problems from
the CEC’2013 competition (Akhmedova, 2013).
This set of benchmark functions (namely there were
28 unconstrained real-parameter optimization
problems) was given in (Liang, 2012); there are also
explanations about the conducted experiments. The
validation of COBRA was carried out for functions
with 10, 30 and 50 variables.
Experiments showed that COBRA works
successfully and is reliable on this benchmark.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
422

Results also showed that COBRA outperforms its
component algorithms when the dimension grows
and more complicated problems are solved
(Akhmedova, 2013).
3.2 Binary Modification of COBRA
As was mentioned, all the algorithms listed above
(PSO, WPS, FFA, CSA and BA) were originally
developed for continuous valued spaces. However
many applied problems are defined in discrete
valued spaces where the domain of variables is
finite. For this purpose the binary modification of
COBRA (COBRA-b) was developed.
COBRA was adapted to search in binary spaces
by applying a sigmoid transformation to the velocity
component (PSO, BA) and coordinates (FFA, CSA,
WPS) to squash them into a range [0, 1] and force
the component values of the positions of the
particles to be 0’s or 1’s.
The basic idea of this adaptation was taken from
(Kennedy, 1997
); firstly it was used for the PSO
algorithm. It is known that in PSO each particle has
a velocity (Kennedy, 1995), so the binarization of
individuals is conducted by the use of the calculation
value of the sigmoid function which is also given in
(Kennedy, 1997
):
s(v) = 1/(1+exp(–v)).
After that a random number from the range [0, 1] is
generated and the corresponding component value of
the particle’s position is 1 if this random number is
smaller than s(v) and 0 otherwise.
In BA each bat also has a velocity (Yang, 2010),
which is why we can apply exactly the same
procedure for the binarization of this algorithm. But
in WPS, FFA and CSA individuals have no
velocities. For this reason, the sigmoid
transformation is applied to position components of
individuals and then a random number is compared
with the obtained value.
Experiments with the same 28 test problems
from (Liang, 2012) showed that the COBRA-b
works successfully and reliably but slower than the
original version of COBRA with a smaller success
rate obtained (Akhmedova, 2013).
Such a result was expected as the binary
modification needs more computing efforts in
continuous variables space and should not be used
instead of the original COBRA. However, it can be
recommended for solving optimization problems
with the binary representation of solutions.
3.3 Self-configuring Evolutionary
Algorithm
If somebody decides to use evolutionary algorithms
for solving real world optimization problems, it will
be necessary to choose the effective variant of
algorithm parameters such as the kind of selection,
recombination and mutation operators. Choosing the
right EA setting for each problem is a difficult task
even for experts in the field of evolutionary
computation. It is the main problem of effectively
implementing evolutionary algorithms for end users.
We can conclude that it is necessary to find the
solution for the main problem of evolutionary
algorithms before suggesting for end users any EAs
application for the automated design of tools for
solving real world problems.
We propose using the self-configuring
evolutionary algorithms (SelfCEA) which do not
need any end user efforts as the algorithm itself
adjusts automatically to the given problem. In these
algorithms (Semenkin, 2012), (Semenkin, 2012), the
dynamic adaptation of operators’ probabilistic rates
on the level of population with centralized control
techniques is applied (see Fig.1).
Instead of the adjusting real parameters, setting
variants were used, namely types of selection
(fitness proportional, rank-based, and tournament-
based with three tournament sizes), crossover (one-
point, two-point, as well as equiprobable, fitness
proportional, rank-based, and tournament-based
uniform crossovers (Semenkin, 2012)), population
control and level of mutation (medium, low, high for
two mutation types). Each of these has its own initial
probability distribution (see Fig. 2) which is changed
as the algorithm executes (see Fig. 3).
This self-configuring technique can be used both
for the genetic algorithm (SelfCGA) and for the
genetic programming algorithm (SelfCGP). In
(Semenkin, 2012) SelfCGA performance was
estimated on 14 test problems from (Finck, 2009).
As a commonly accepted benchmark for GP
algorithms is still an "open issue" (O’Neill, 2010),
the symbolic regression problem with 17 test
functions borrowed from (Finck, 2009) was used in
(Semenkin, 2012) for testing the self-configuring
genetic programming algorithm. Statistical
significance was estimated with ANOVA.
SpacecraftSolarArraysDegradationForecastingwithEvolutionaryDesignedANN-basedPredictors
423

Figure 1: Main part of SelfCEA block diagram.
Figure 2: Flowchart illustrating step 1 in SelfCEA block
diagram.
Analysing the results, related to SelfCGA
(Semenkin, 2012) and SelfCGP (Semenkin, 2012), it
can be seen that self-configuring evolutionary
algorithms demonstrate higher reliability than the
average reliability of the corresponding single best
algorithm but sometimes worse than the best
reliability of this algorithm.
Figure 3: Flowchart illustrating step 7 in SelfCEA block
diagram.
Both SelfCGA and SelfCGP can be used for the
automated choice of effective structures and weights
tuning of ANN-based predictors.
4 ANN AUTOMATED DESIGN
The appropriate structure of ANN must be chosen
for the effective solving of the forecasting problem.
Below we consider COBRA-b and SelfCGA for the
choice of the number of layers, the number of
neurons in each layer and the type of the activation
function of each neuron for the multi-layered
perceptron as well as SelfCGP for the automated
design of the feed-forward ANN with an arbitrary
structure.
4.1 ANN in Binary String
First of all we choose the perceptron with 5 hidden
layers and 5 neurons in each hidden layer as a
maximum size of the structure for ANN. Each node
is represented by a binary string of length 4. If the
string consists of zeros (“0000”) then this node does
not exist in ANN. So, the whole structure of the
neural network is represented by a binary string of
length 100 (25x4); each 20 variables represent one
hidden layer. The number of input neurons depends
on the problem in hand. ANN has one output layer.
We use 15 of the most common activation
functions. For determining which activation function
will be used on a given node, the integer that
corresponds to its binary string is calculated.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
424
Thus we use the optimization methods for
problems with binary variables (COBRA-b,
SelfCGA) for finding the best structure and the
optimization method for problems with real-valued
variables (COBRA, SelfCGA hybridized with local
search) for the weight coefficients adjustment of
each structure.
Although the ANNs structure automated design
by self-adapting optimization technics improves
their efficiency, it can work unsatisfactorily with big
real-world problems. Therefore, the automation of
the most important input selection can have a
significant impact on the efficiency of neural
networks. In this paper, we use additional bits in
every string for the choice of relevant variables to
put them in model. The number of these bits equals
the number of input variables. If this bit is equal to
‘0’ then the corresponding input variable is not used
in the model and is removed from the sample.
During initialization, the probability for a variable to
be significant will be equal to 1/3. This idea can help
end users to avoid the significant and complicated
procedure of choosing the appropriate set of input
variables with essential impact on the model
performance.
For the choice of more flexible models more
sophisticated tools must be used.
4.2 ANN Design with SelfCGP
We have to describe our way to model and optimize
an ANN structure with genetic programming (GP)
techniques before the employment of our SelfCGP
algorithm.
Usually, the GP algorithm works with tree
representation, defined by functional and terminal
sets, and exploits specific solution transformation
operators (selection, crossover, mutation, etc.) until
the termination condition will be met (Poli, 2008).
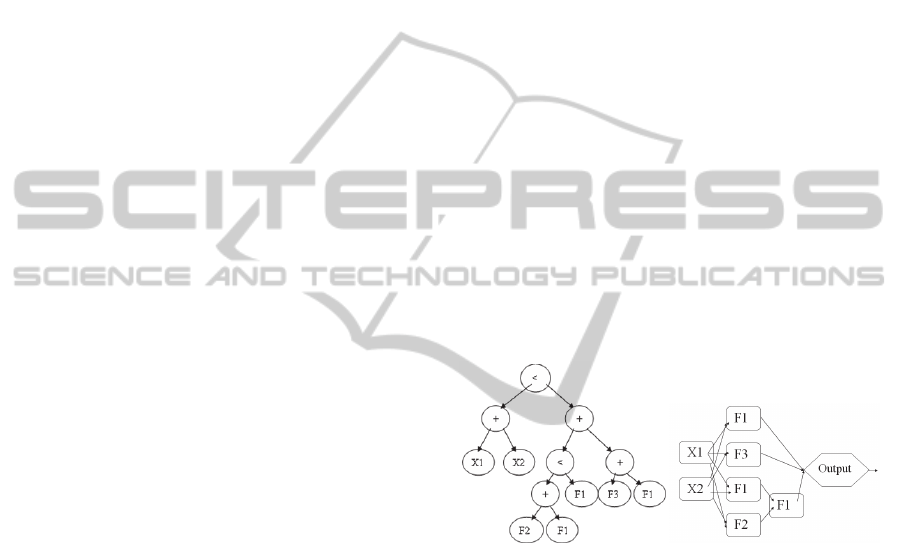
The terminal set of our GP includes input
neurons and 15 different activation functions. The
functional set includes specific operations for neuron
placement and connections. The first operation is the
placing of a neuron or a group of neurons in one
layer. There will be no appearance of additional
connections in this case. The second operation is the
placing of a neuron or a group of neurons in
sequential layers in such a way that the neuron
(group of neurons) from the left branch of the tree
precedes the neuron (group of neurons) from the
right branch of the tree. In this case, new
connections will be added which connect the
neurons from the left branch of the tree with the
neurons from the right branch of the tree. Input
neurons cannot receive any signal but have to send a
signal to at least one hidden neuron. It might be so
that our GP algorithm does not include some of the
input neurons in the resulting tree, i.e., a high
performance ANN structure that does not use all
problem inputs can be found. This feature of the
approach allows the use of GP for the selection of
the most informative combination of problem inputs.
The tree and corresponding neural network example
are presented in Figure 4.
The GP algorithm forms the tree from which the
ANN structure is derived. The ANN training is
executed to evaluate its fitness which depends on its
performance in solving the problem in hand, e.g.,
approximation precision or number of misclassified
instances. For training this ANN, connection
weights are optimized with the self-configuring
genetic algorithm (SelfCGA) which does not need
any end user efforts as the algorithm itself adjusts
automatically to the given problem". When GP
finishes giving the best found ANN structure as the
result, this ANN is additionally trained with again
the SelfCGA hybridized with a local search. The
same approach is used for the application of
SelfCGP.
Figure 4: Tree and corresponding neural network example.
The efficiency of the proposed approach was
tested on the representative set of test problems
(approximation, time series prediction) (Panfilov,
2012). The test results showed that the neural
networks created by SelfCGP have a small number
of neurons in comparison with neural networks
obtained by means of neuro-simulator and are not
fully connected (few connections between neurons).
Besides, the automatically designed ANNs did not
include all inputs in model, i.e. reduced the input
space.
5 EXPERIMENTAL RESULTS
We used evolutionary designed ANN-based
predictors for the forecasting of the solar array
SpacecraftSolarArraysDegradationForecastingwithEvolutionaryDesignedANN-basedPredictors
425
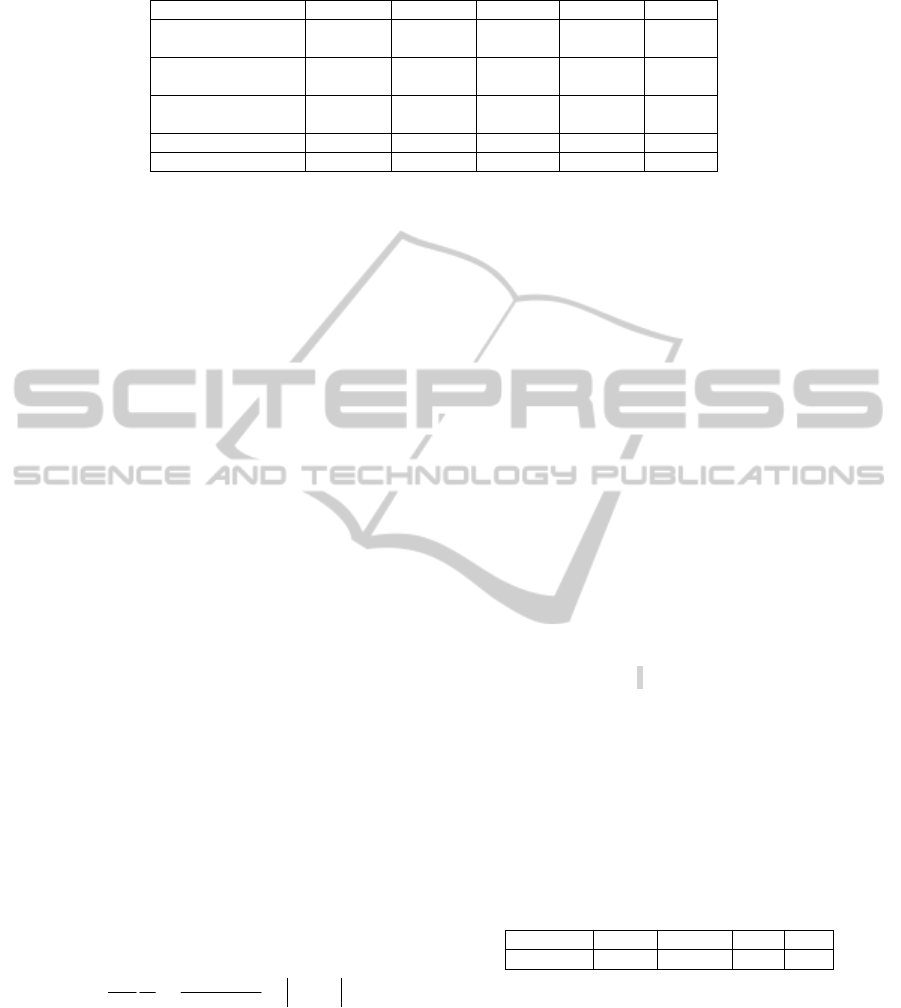
Table 1: Results for solar arrays degradation prediction.
Algorithm 1 2 3 4 Mean
SelfCGP+ANN 4,3196
(5,0442)
4,1441
(4,9392)
4,65
(5,53)
5,4863
(6,2066)
4,65
(5,43)
SelfCGP 4,6726
(5,7688)
4,4827
(5,5344)
5,03
(6,21)
5,9346
(7,3268)
5,03
(6,21)
SelfCGA+ANN 4,8584
(5,2672)
4,661
(5,0531)
5,232
(5,671)
6,17056
(6,6897)
5,23
(5,67)
COBRA+ANN+S 5,1127 2,8841 4,5755 8,6907 5,3158
COBRA+ANN 5,04907 4,77149 4,95868 6,62939 5,3522
degradation. The list of used tools is as follows:
1. Self-configuring genetic programming algorithm
for the automated ANN design (SelfCGP+ANN)
(Panfilov, 2012);
2. Self-configuring genetic algorithm for the
automated ANN design and the significant
variables choice (SelfCGA+ANN);
3. Co-Operation of Biology Related Algorithms for
automated ANN structure search
(COBRA+ANN+S) (Akhmedova, 2014);
4. Co-Operation of Biology Related Algorithms for
adjusting weight coefficients in the single layer
perceptron with 3 neurons in the hidden layer
(COBRA+ANN).
Additionally, we used for the comparison some
other approaches:
1. Symbolic regression based predictor designed
with SelfCGP (Semenkin, 2012);
2. Fuzzy logic (FL) and neural-fuzzy logic (NFL)
based predictors designed with GA (Shabalov,
2012);
3. ANN based predictor designed with Genetic
Programming based Ensembling (GPEN)
technique (Bukhtoyarov, 2012);
4. ANN based predictor designed with Neural
Network Ensemble (GASEN) technique
(Bukhtoyarov, 2012).
For all approaches, the prediction error was
estimated in the same way:
m
i
s
j
i
j
i
j
ii
oy
yyms
error
minmax
11100
,
where s is the test sample size, m is the outputs
number, y is the true output value, and o is the
model output.
The problem sample for the prediction of solar
array degradation contains information about 295
days and has 7 inputs and 4 outputs. We used first
169 examples for training and the last part of the
examples for testing our models. Results for all
techniques presented in this paper are given in Table
1. The first number in each cell is the best found
result among all algorithm runs. The mean error
averaged over all runs is presented in brackets.
It is easy to see that SelfCGP for the ANN
automated design exhibits the smallest among the
best results; its mean result is better than the best
results of other techniques that do not use the self-
configuration. In particular, the relative error, that is
equal to 4.319, is equivalent to the first output error
that is equal to 0.1597V from a possible 3.6971V.
Typically, SelfCGP and SelfCGA used only six
inputs from seven and ignored the integral fluence of
protons with the smallest energy.
The results of alternative approaches are
presented in Table 2. Comparing this Table with
Table 1 it can be seen that the approaches described
in this paper essentially outperform alternatives that
use fuzzy logic (NFL, FL) and are outperformed by
ensembling methods, although self-configuring
algorithms outperform one ensembling method as
well (GASEN). The current best method (GPEN) to
a large extent does not outperform self-configuring
algorithms although it uses the ensembling
technique. One can reasonably conclude that an
ensembling technique based on the EA self-
configuration could further improve the quality of
the prediction.
Table 2: Best results for alternative methods.
Algorithm GPEN GASEN NFL FL
Mean 4,29 5,23 5,87 7,66
An additional observation is the differences in
required computational efforts for different methods.
The ensembling methods mentioned above have to
configure more than 10 individual intellectual
information technologies and generate formulae for
their interaction. This is at least 10 times more time
consuming than using one neural network. Certainly,
the methods presented in this paper do not use any
ensembling techniques and need much less
computing time. At the same time, the best
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
426

algorithm among those presented in the paper
(SelfCGP+ANN) requires 1,5 times more
computational efforts although it uses the same
number of fitness function evaluations.
Nevertheless, SelfCGP+ANN should be used for the
real-world SA degradation prediction as it has a
much smaller error while the extra time spent is just
some hours for computing that cannot be considered
as a serious drawback in a process requiring many
months of expensive experimentations.
6 CONCLUSIONS
In the paper four approaches to the automated design
of ANN-based predictors for the degradation of
spacecraft solar arrays were described and their
performance estimation on real-world data was
fulfilled. All these approaches differ from
alternatives in the way they are adapted to the
problem in hand. Namely, all these approaches are
self-adapted and do not require from end users any
expertise in computational intelligence (evolutionary
computations, neural networks, etc.). The most
perspective approach was determined, i.e. SelfCGP,
although others also deserve further development.
The evident way of approach improvement is the use
of an ensembling technique although other
directions should also be used, e.g. better
implementation of self-adaptation techniques.
ACKNOWLEDGEMENTS
This research is supported by the Ministry of
Education and Science of Russian Federation within
State Assignment № 2.1889.2014/K.
REFERENCES
Akhmedova, Sh., Semenkin, E., 2013. New optimization
metaheuristic based on co-operation of biology related
algorithms. Vestnik. Bulletine of Siberian State
Aerospace University, Vol. 4 (50), 2013, pp. 92-99.
Akhmedova, Sh., Semenkin, E., 2013. Co-Operation of
Biology Related Algorithms. In: Proc. of the IEEE
Congress on Evolutionary Computation (CEC 2013),
Cancún, Mexico, 2013, pp. 2207-2214.
Akhmedova, Sh., Semenkin, E., 2014. Co-Operation of
Biology Related Algorithms Meta-Heuristic in ANN-
Based Classifiers Design. In: Proceedings of the IEEE
Congress on Evolutionary Computation (IEEE CEC),
2014. –accepted to publication.
Bukhtoyarov, V., Semenkin, E., Shabalov, A., 2012.
Neural Networks Ensembles Approach for Simulation
of Solar Arrays Degradation Process. In Proc. of
Hybrid artificial intelligent systems 7th International
Conference, HAIS 2012, Salamanca, Spain, 2012, pp.
186-195.
Eiben, A. E., Smith, J. E., 2003. Introduction to
Evolutionary Computing. Springer Verlag, 2003,
299p.
Finck, S. et al., 2009. Real-parameter black-box
optimization benchmarking 2009. In: Presentation of
the noiseless functions. Technical Report Researh
Center PPE.
Kennedy, J., Eberhart, R., 1995. Particle Swarm
Optimization. In Proc. of IEEE International
Conference on Neural networks, IV, 1995, pp. 1942–
1948.
Kennedy, J., Eberhart, R.,1997. A discrete binary version
of the particle swarm algorithm. In Proc. of the World
Multiconference on Systemics, Cybernetics and
Informatics, Piscataway, NJ, 1997, pp. 4104-4109.
Liang, J. J., Qu, B. Y., Suganthan, P. N., Hernandez-Diaz,
A. G, 2013. Problem Definitions and Evaluation
Criteria for the CEC 2013 Special Session on Real-
Parameter Optimization. In Technical Report 2012,
Computational Intelligence Laboratory, Zhengzhou
University, Zhengzhou China, and Technical Report,
Nanyang Technological University, Singapore.
O’Neill, M., Vanneschi, L., Gustafson, S., Banzhaf, W.,
2010. Open issues in genetic programming. In:
Genetic Programming and Evolvable Machines 11,
2010, pp. 339–363.
Panfilov, I. A., Semenkin, E. S., Semenkina, M. E., 2012.
Neural Network Ensembles Design with Self-
Configuring Genetic Programming Algorithm for
Solving Computer Security Problems. In:
Computational Intelligence in Security for Information
Systems, Advances in Intelligent Systems and
Computing 189, Springer-Verlag, Berlin Heidelberg,
2012, pp. 25-32.
Poli, R., Langdon, W. B., McPhee, N. F., 2008. A Field
Guide to Genetic Programming. Published via
http://lulu.com and freely available at http://www.gp-
field-guide.org.uk, 2008. (With contributions by J. R.
Koza).
Semenkin, E., Semenkina, M., 2012. Self-Configuring
Genetic Programming Algorithm with Modified
Uniform Crossover Operator. In: Proceedings of the
IEEE Congress on Evolutionary Computation (IEEE
CEC), 2012, pp. 1918-1923.
Semenkin, E. S., Semenkina, M. E., 2012. Self-
configuring Genetic Algorithm with Modified
Uniform Crossover Operator. Advances in Swarm
Intelligence, Lecture Notes in Computer Science 7331,
Springer-Verlag, Berlin Heidelberg, 2012, pp. 414-
421.
Shabalov, A., Semenkin, E., Galushin, P., 2012.
Integration of Intelligent Information Technologies
Ensembles for Modeling and Classification. In Proc.
of Hybrid artificial intelligent systems 7th
SpacecraftSolarArraysDegradationForecastingwithEvolutionaryDesignedANN-basedPredictors
427

International Conference, HAIS 2012, Salamanca,
Spain, 2012, pp. 365-374.
Yang, C., Tu, X., Chen, J., 2007. Algorithm of Marriage in
Honey Bees Optimization Based on the Wolf Pack
Search. In Proc. of the International Conference on
Intelligent Pervasive Computing, 2007, pp. 462-467.
Yang, X. S., 2009. Firefly algorithms for multimodal
optimization. In Proc. of the 5th Symposium on
Stochastic Algorithms, Foundations and Applications,
2009, pp. 169–178.
Yang, X. S., Deb, S., 2009. Cuckoo Search via Levy
flights. In Proc. of the World Congress on Nature &
Biologically Inspired Computing, IEEE Publications,
2009, pp. 210-214.
Yang, X. S., 2010. A new metaheuristic bat-inspired
algorithm. In Nature Inspired Cooperative Strategies
for Optimization, Studies in Computational
Intelligence, Vol. 284, 2010, pp. 65-74.
Zhang G., Patuwo B. E., Hu M. Y., 1998. Forecasting with
artificial neural networks: The state of the art.
International Journal of Forecasting 14, 1998, pp. 35–
62.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
428
