
Development of Therapeutic Expression for a Cat Robot in the
Treatment of Autism Spectrum Disorders
Bo Hee Lee
1
,
Ju-young Jang
1
, Keum-hi Mun
2
, Ja Young Kwon
3
and Jin Soun Jung
4
1
Department of Electrical Engineering, Semyung University, Jecheon-si, R.O. Korea
2
Department of Industrial Design, Semyung University, Jecheon-si, R.O. Korea
3
Department of Social Welfare, Semyung University, Jecheon-si, R.O. Korea
4
Department of Fashion Design, Semyung University, Jecheon-si, R.O. Korea
Keywords: Autism Spectrum Disorder, Social Interactions, Treatment Behaviour, Face Mechanism, Therapeutic
Expression, Hand Gesture, Controller and Sensor.
Abstract: The purpose of this research is to develop a therapeutic expression for the use of early treatment that will
improve the social interactions of children with autism spectrum disorders (ASD). In order to satisfy the
purpose, we choose a cat character after surveying requirements and summarize the required actions for a
treatment as hugging, eye contacts, copies of body movements and reactions to negative behaviours. The
robot has a face mechanism that can express the emotion and a body mechanism to perform hand gesture.
We also designed a system controller and sensor interfaces to control its body or interact with children. All
the use history of the robot is stored at the memory device to analyze the play patterns of the patient and
also used to make the treatment program that can be utilized in the specialized clinic. In this study, the
therapeutic expression for the treatment of ASD is suggested and ported in a cat robot, and verified with real
action experiment of those functions. This study is kinds of preliminary result before developing a treatment
therapy for ASD children using perfect cat robot that has outer skin and furry coat, and followed by
expression research for the suitable program that can be applied in the real treatment field.
1 INTRODUCTION
ASD is reportedly the fastest spreading childhood
disorder. It is known that one in 150 children is
diagnosed with ASD. The main characteristics of
children with ASD are that they have social
interaction disabilities, communication disabilities,
repetitive stereotypy behaviours, and limited
attention spans. Existing methods of treatment and
education are greatly limited because these children
cannot properly express their own emotional states
and consequently a new treatment system needs to
be developed. Initiatives that use robots to treat
ASD children have consistently reported positive
results in improved interactions, eye contact, and
concentration (Cho et al., 2009; Feil-Seifer and
Mataric, 2008; Lee et al., 2010; Robin et al., 2005,
Scassellati et al., 2012). ASD children have actively
reacted to robots, initiated interactions, and
increased exploring stimulus that they liked (Kim et
al., 2011). In the previous study, we have
investigated the effect of the treatment using robot
and how to design such a robot (Kwon et al., 2014).
Sometimes robot can be used to treat ASD with
making custom scenarios and revising or training
robot program just using commercially available
robot (Gillesen and Barakova, 2011), and this study
results showed that robot has the potential to be used
as a treatment and educational medium for ASD
children. In this study we conducted FGIs with
professional therapists and parents of ASD children
in order to discover the motions and abilities the
robots need to be utilized in treating ASD children
under the situation of Table 1 and 2. According to
FGI result analysis, robots were found to need the
following motions and abilities. First, it requires the
“individualization”. This abilities of robots need to
be developed on various levels depending on the
development of the ASD child in order to conduct
individualized treatment. The robot should be
responsive to the child’s actions instead of leading.
Second, it should have “ability to stimulate the
senses”. This is the ability to express through the
various senses according to the situation. It is
640
Lee B., Jang J., Mun K., Kwon J. and Jung J..
Development of Therapeutic Expression for a Cat Robot in the Treatment of Autism Spectrum Disorders.
DOI: 10.5220/0005123106400647
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 640-647
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

accomplished by visual, textual, olfactory, and
auditory sensors to measure touch, temperature,
sound, light, color, smell, etc.
Table 1: Background for FGI participants –therapist.
Table 2: Background for FGI participants –parents.
Third, it should have “interactive motion”. Since
eye-contact is an important measure of interaction.
During the interaction a robot should be able to
move and positively react according to the child’s
gaze and eye-contact range. It also has the ability to
negatively respond to child’s behaviors that need
correcting or aggressive behavior, etc. This also
includes the ability to emulate the child’s actions,
hugging motion, requesting motion to play with the
child, and eating motion as if it is a real pet.
Finally, this kind of robot can be able to “manage
all of the behavior” or result of the treatment using
operation history. It should have the function for
family members or therapists to control the robot
with a remote control or the ability to select from a
various range of programs according to the child’s
conditions with the swappable memory cards. In
addition it can notice the changes in the child’s
behavior during use of the robot. This therapeutic
program should be included user interface for
controlling and monitoring the robot. In this paper,
we suggest some effective treatment method based
on the feedback of the field and robot design to be
suitable for making such action.
2 ROBOT DESIGN
2.1 Required Action and Expression
After surveying of FGI result, we found that actions
of a cat robot for a treatment must include making
hugs, doing eye contacts, imitating body movements
and reactions to negative behaviours as shown in
figure 1. In order to perform these acts, the robot has
to be designed proper physical structure. Head can
be able to move in all directions, and legs should be
operated with suitable structure for hugging and
negative reactions.
Figure 1: Actions for treatment: (a) eye contacts, (b)
hugging, (c) imitating body movements,(d) reaction to
negative acts).
At the same time, for treatment of ASD children,
it should be required some actions expressing
happiness, sadness, anger, and surprise. This robot
could make expressions on the face showing the
status of emotion just like human. It should be
possible to show children in moving ears, eyebrows,
and eyelid movement according to emotion, and
realized with giving various changes like raising
tails of lip up and down.
Figure 2: Facial expression: (a) surprise, (b) anger, (c)
happiness,(d) sadness,(e) absence of expression.
2.2 Character and Mechanical Design
A referred cat robot is implemented to be covered by
furry coat with the same length of furry as a real cat.
The ratio between a face and a body is given with
1:2 to show the cuteness of a baby cat. For a better
showing of the change on a facial expression,
eyebrows is emphasized and eyes are bigger than
normal size according to the result of a preference
DevelopmentofTherapeuticExpressionforaCatRobotintheTreatmentofAutismSpectrumDisorders
641

research and tails of eyes is centered. A cat robot has
the height of 50cm to be set up at the children’s eye
level as shown in the Figure 3.
Figure 3: Internal mechanism.
To be looked more like a cat, a shape of face,
ears, body are designed. Eyes, a mouth and ears are
designed with emphasis on the shape than the real to
have the better appearance of the facial expression.
Supporting structure is needed inside for electronic
circuits. For the structures of body and skeleton,
aluminum structures are used to sustain strong and
light-weighted. A joint for making movements in
set-up angles is equipped with a servomotor.
Figure 4: Outward appearance design.
As a whole, it would be embodied with 21 joints
including actions of legs and tail. At the same time,
an outward appearance is designed to protect the
designed inner part and structure. The outward
appearance is designed for the tight joint with the
structure of inner part. To assemble the parts using
each hole of the parts prepared in the inner part
structure design, outward appearance design was
processed separately by two parts.
2.3 Joint and Electrical System Design
Cat robot for the ASD treatment should be
considered the action against the user's abnormal
behavior. Its structure also has to sustain strong
external force with strong material like aluminum
alloy. In addition to reduce the weight, it should be
made by many empty spaces on the skeleton as soon
as possible. For the treatment of emotional
expression to a face part, intelligent controller units
related with the movement should be considered in
the body portion and the tail portion. It maybe takes
after real cat and be able to do similar movement.
Head unit is very important to represent the emotion.
It has parts of the eyes with forehead, eyebrows,
mouth, and ears like a cat, which are operated with
10 motors. Furthermore the each parts of the face are
arranged separately and controlled by each
individual motors, so they can move independent
and express the required emotions. In the upper leg,
three joint are placed with the motion of shoulder
and elbow that can be used to make some human-
friendly gesture. In the right and left hip portion,
high torque driven legs are designed to make stand-
down or stretching. And one joint is placed to
express the pleasant feeling by waving a tail. In
connecting the head and neck of the body, two
degrees of freedom is implemented with the motion
of shaking and nodding, so cat robot has a total of 21
degrees of freedom.
Figure 5: Motor movements in body and face.
Generally cat robot has an initial posture sitting
at table, and be excluded the walking function of
real cat. It just vents main body using hip joints to
make up-down motion of body. Especially hip
motors are so powerful enough to drive whole body
and withstand the load variation from external. In
addition various types of sensor system were
installed on the skin or under the skin in order to
give robot-human interaction like intelligent
behavior and sympathetic action.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
642
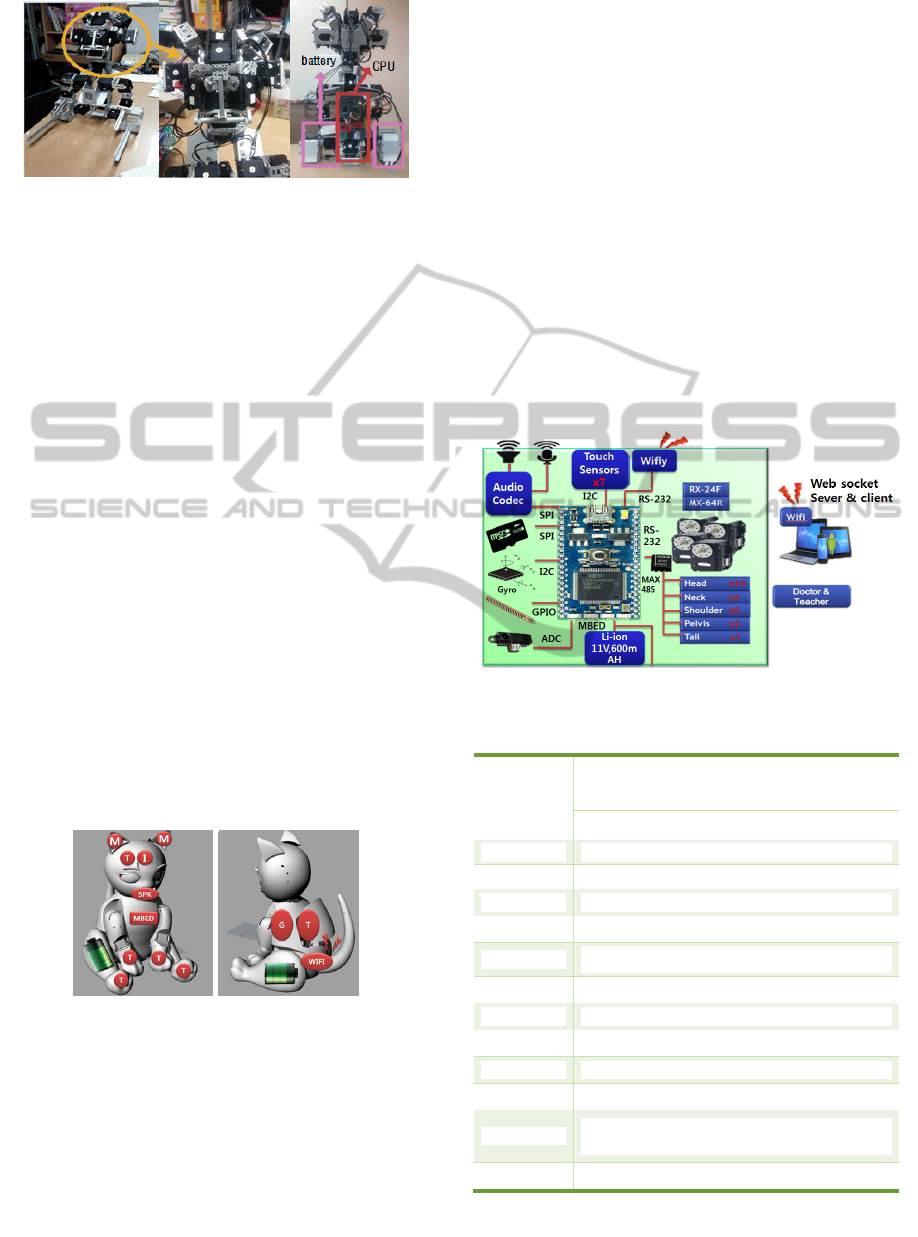
Figure 6: Cat robot skeleton and motor installation.
2.4 Controller Design
The operations of each part of the body and
interactions between robot and ASD children are
detected by wide range of internal and external
sensors of the robot. Several capacitive contact
sensors were installed on head, back, belly, and
upper legs, which can detect the user's touch. Touch
information from the sensors are stored in micro SD
that is plugged in main controller and be made
available for the analysis and making treatment
program in the future. In addition sound generating
device is designed to generate cat voice according to
various situations. The cat sound can be reproduced
through audio Codec with electrical speaker. Sound
effect is essential to make interaction with each
other, especially in ASD treatment. An infrared
sensor can catch the motion when somebody moves
within a boundary of certain distance. It can be able
to measure the distance between user and robot and
also direction of movement, so it can be used to
increase intimacy with robot. In the waist, a 3-axis
accelerometer was installed to measure the robot
orientation to check if the robot was tilted, lifted, or
if user try to hug according to the user's feeling.
Figure 7: Sensor deployment (T:touch,G:gyro,I:infrared).
All the proposed motion is determined by number of
commands that ordered from operator on the web
through Wireless Internet (Wifi), and robot behavior
and actions is set by downloading command on the
web. In this way many working robots in different
field are available to play in the response of the
robot and easily collect data as a useful therapeutic
effect, and the teacher or operator can control the
robot remotely as a medium of treatment. Motors for
driving the joint are one of the two types of
ROBOTIS MX-64 (6.0Nm) or AX-32 (2.6Nm),
which are controlled using the RS485
communication with only two lines in controlling
multiple motors(Robotis,2014). Main MCU was
designed to perform all of the control with easiness.
It is based on Mbed, 32-bit ARM ® Cortex ™-
M3(LPC1768) interfaced with various sensors and
driver to control actuator (MBED, 2014). The total
power consumption of the motor 21 can be driven at
the same time, so we should take into account of the
critical situation. 3000mAH, 3.7V Lithium-ion
battery is used with several combinations and finally
to produce 6000mAH 11.2V. The entire actuator and
the controller about the connection of the sensor are
shown in a block diagram and a specification is
summarized in Table 3.
Figure 8: Block diagram of the controller.
Table 3: Robot specification.
Actuator
total number of motors (21)
Dynamixel RX-24F(2.6Nm) : 14
Dynamixel MX-64(5.3Nm) : 7
Weight 5Kg(including battery)
Height 50Cm
Inner skin plastic
Outer skin artificial fiber(antibiotic, flavor)
CPU
Mbed(NXP LPC1768 기반,Cortex-M3)
Sensors
Touch MPR121 based (I2C)
Sound VS1053 based (SPI)
Balance L3GD20 based (I2C)
Speaker AS04008CO-WR-R, 8Ω
Battery
LG Chemistry 18650,11V, 6000mAh(3.7V
3000mAh Lion, 6)
Network Wifly(RN-171)
DevelopmentofTherapeuticExpressionforaCatRobotintheTreatmentofAutismSpectrumDisorders
643
3 ANALYSIS OF ROBOT
In order to move robot joints properly, motor control
system is designed under the analysis of operation.
At the same time, since there are various sensors
attached to robot, intelligent system should be
implemented to identify with an operation. The
picture below shows the overall appearance of cat
robot without skin that will be implemented in the
near future. In order to give leg motion, we should
make plan for the predefined joint motion. Based on
this concept, all the kinematic analysis of the each
link joint is performed as follows. First, the
kinematic parameters of motor 21 are defined after
setting the joint coordinate system by D-H
representation. 10 joints among 21 are placed in the
head for emotional expression and require the
predefined action, but others in the body, and legs
must be designed the motion based on this analysis.
Joint analysis starts from doing by setting a
coordinate system at upper leg and the neck part
separately. So they can be divided into 3 individual
coordinate systems. First, origin of overall world
coordinator is expressed in the center of the sitting
robot and other one is located in the middle of both
upper legs, and last one is in center point of neck. In
analysis process, we only consider upper leg
coordinate system because it should be used to make
lots of gesture, but others are needed only predefined
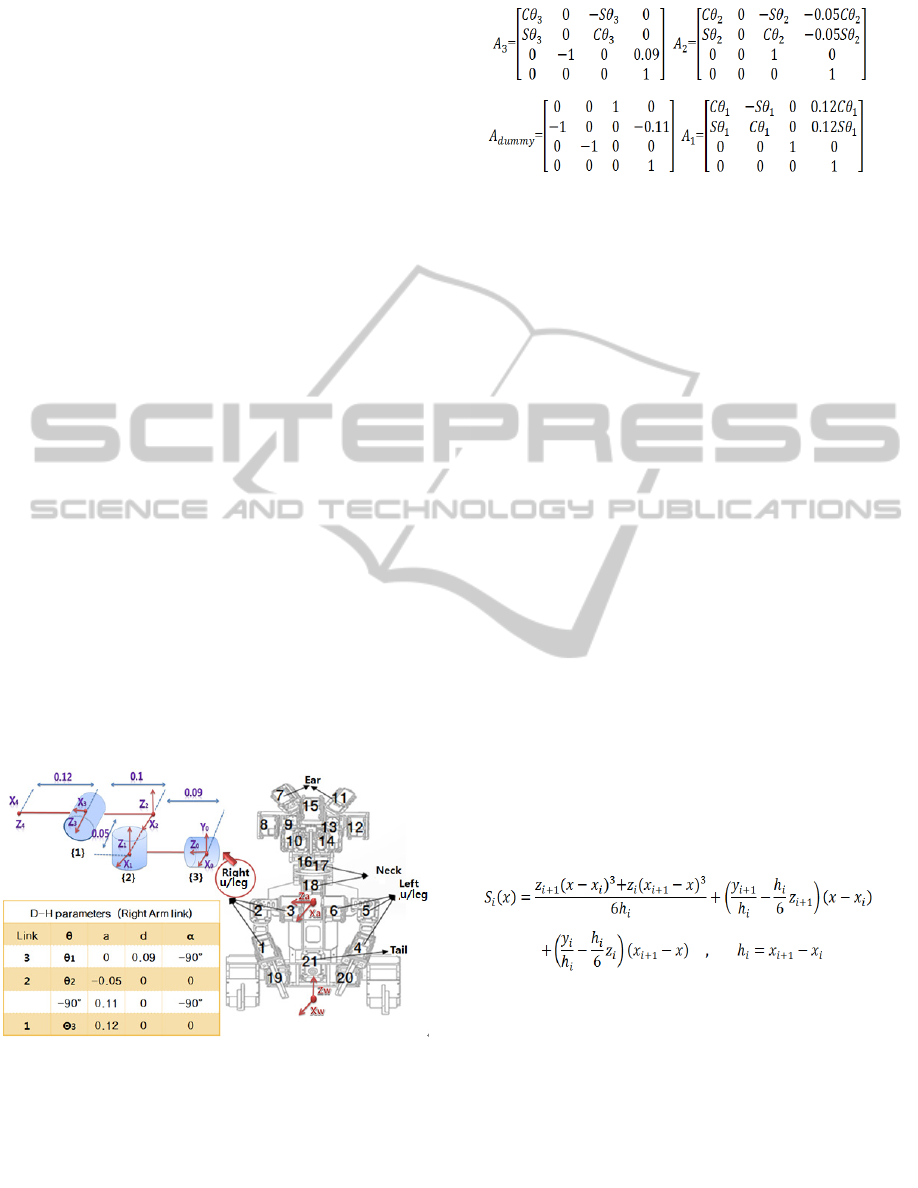
function. The link allocation and kinematic analysis
of leg can be expressed with the coordinate system
as shown in Figure 9.
Figure 9: Coordinate system.
Forward kinematics is calculated as follows based
on the upper legs and shoulders with DH parameters
(1)
Using this result from kinematics, leg joint
angles are derived by the inverse kinematics and
created the movement of joints. Generally in
planning the trajectory of the object, Euler angle
representation is so popular. To acquire distal
positions, Jacobian for each posture is derived with
velocities of hand gesture between robot and human.
The process of inverse kinematics was transplanted
into the main controller with a MBED module to
work in real time. When doing jobs with robot, we
should give several discrete points to the robot
which are going through between the point and point.
At this time, the intermediate points with respect to a
given discrete points are obtained by interpolation,
and robot can move the target points smoothly using
these points. We use cubic-spline interpolation
passing through each point from the position and
velocity, and acceleration in the form of the
continuity of the operation of the robot performing
the interpolation and finally could be controlled
smoothly. In this analysis, robot trajectory is derived
at some positions from the start to 10 seconds during
hand gesture.
In order to get the trajectory points, we applied
the interpolation using spline curve that is called to
Natural cubic interpolation. The coefficients of the
polynomial are determined as follows (Hazewinkel,
et al., 2001).
(2)
Here, z is determined by the boundary condition
coefficient values. Figure 10 shows the result of
trajectory planning under the Table 4 condition. We
can find the smoothness during all of the working
time. After checking the value of planning the
movement of joints with respect to the gesture of
robot, therapeutic operation can be realized in the
real robot.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
644
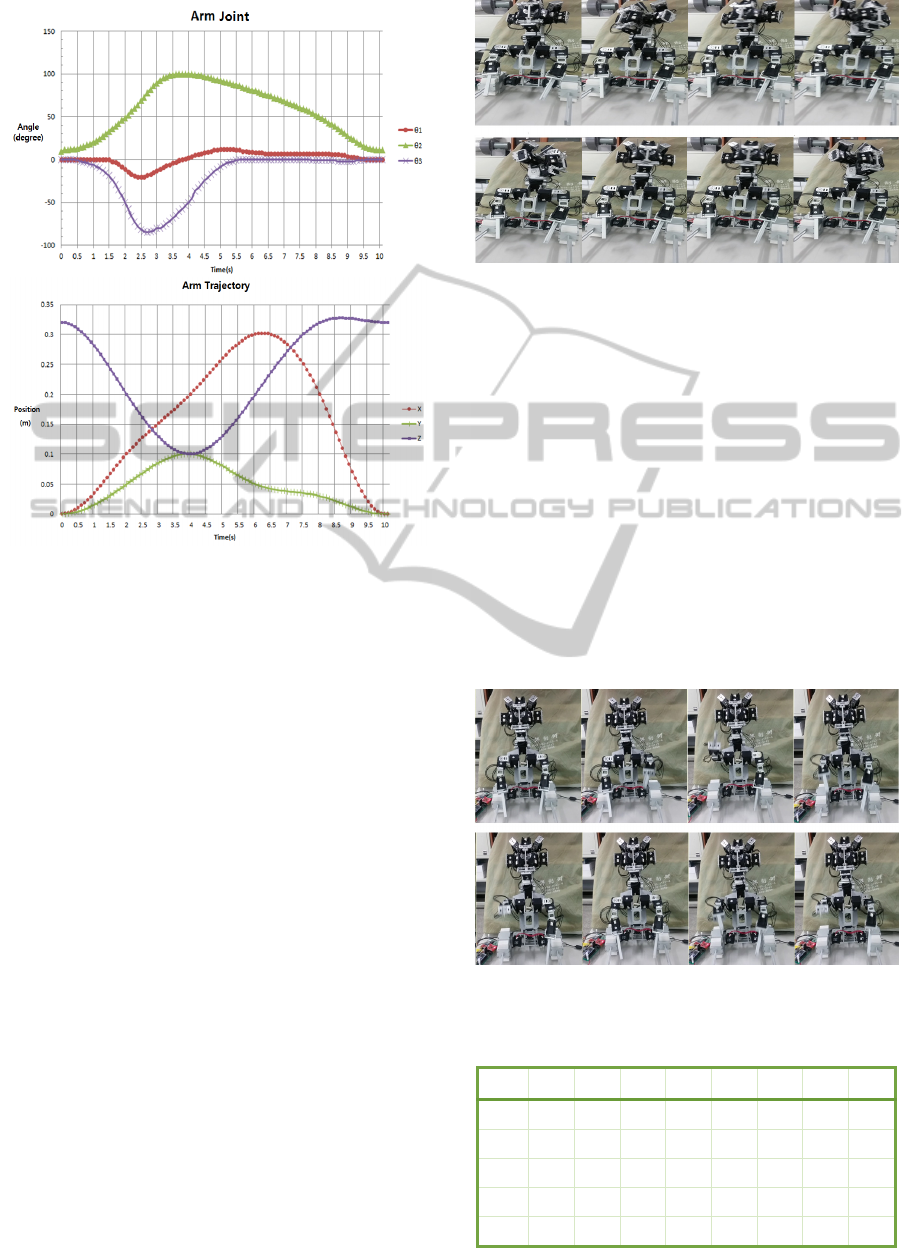
Figure 10: Trajectory planning.
4 EXPERIMENT
The required operations of the robot based on the
analysis above are implemented to show usability.
To do this, read the value of the current angles of
each motor and stored them in the micro SD card,
and generated the required operation on the basis of
the stored data. In order to move smoothly,
trajectory of the action was generated by using via
points which were recorded from offline operation.
Some of operations that are needed to be used in
treatment operation were performed.
4.1 Expression of Negative Feedback
First, the expression of negative behavior is tried to
give negative action to ASD children. The behavior
is predefined with required action in advance.
Depending on the sensor operation the head turning
from side to side is expressed in the middle of action
and this kind of expression showing the unpleasant
emotion allows patients to lead more reliably. The
history of negative behavior is memorized and
reported to doctor as an aid of treatment. As shown
in the Figure 11, a robot is shaking his head from sid
e to side with some hand gesture, and also a negative
sound is generating to express such action.
Figure 11: Behavior of negative feedback.
4.2 Imitation and Gesture
Some typical behaviors of cat are implemented using
body and hands together according to user action.
Hand or back movement is kinds of checking
operation whether the action has been completed or
not. Lifting up hands can make the patient easier to
handle the robot or hug easily. At the same time
robot makes crying sound in the middle of action
and sometimes change the shape of the eyebrows or
the mouth to imitate the actual animal action. These
actions are not finished yet because outer skin was
not implemented in cat robot. Figure 12 shows the
imitation gesture using hand and legs with respect to
Table 4 information.
Figure 12: Imitation behavior.
Table 4: Joint angles of the gesture.
Motor 3 4 6 7 8 12 15 16
start 202.2 141.8 147.3 157.6 145.6 160.8 99.3 157
via1 192.9 150.9 250.6 136.2 125.4 170.8 115.9 192.8
via2 192.9 150.9 250.6 136.2 127.1 175.2 115.9 155.6
via3 192.9 150.9 250.6 136.2 127.7 171.7 115.9 155.6
end 192.9 150.9 250.6 136.2 145.3 155 100.6 155.6
DevelopmentofTherapeuticExpressionforaCatRobotintheTreatmentofAutismSpectrumDisorders
645

If somebody rubs belly, it responds with the
action of alternating hands to express the good feelin
g and also performs hand gestures with facial expres
sion. At the same time it makes some typical cat sou
nd opening a mouth. During this operation, the shoul
der joint 3 and 6, were lifted up and down most of
time and elbow joint 6 and 7 were worked
intermittent.
4.3 Facial Expression
Several expressions can be made using face such as
folding ears, lifting eyebrows and changing the lip
shape. In this experiment, movements of upper and
lower lip, eyebrow, and ear pieces are designed and
implemented the sequential action with various
emotional combinations. Furthermore in case of
implementation of the entire face covered with fur
and skins, we could express precise facial expression.
Figure 13: Eyebrow movement.
Some structure is designed to make the eyelids w
inding, floating, and working separately in wink
operation. Robot emotions using eyebrow is an impo
rtant part of a cat and given by 2 degrees of freedom
to be able to express a different look. The eye
behavior is shown in the Figure 14.
Figure 14: Eye movement.
The frame structure and the outer covering of the
eye with consideration of the connection structure
are carefully performed in order to move the eye
brows variously according to emotions. From the
right side it shows the eye expression such as closed
or open eye fully or half. The lip movements are ex
pressed with the middle structure of face and sides
of lips. It can be closed, open, and also make some
shapes to express anger, sadness and surprise, etc.
Figure 15: Lip movement.
The ear has the function only up and closing. It is
deemed that no other action is required other than
the above operation. The two ears are designed to
move independently. We can express the emotion
like a surprise or contentment using this ear.
4.4 Eye Contact
Another method for expressing emotion is eye
contact that can be useful to expand user
communication.
Figure 16: Eye contact.
In order to perform this operation, first detect a
human body by a position and direction sensor on
the body frame. In this experiment, the user moves
from left to right and robot head is moving
accordingly with the movement of user
4.5 Hug
Hugs are the most intense action between a robot
and ASD children as a way of self-expression.
Because of the complexity of the operation, we
should convey partial reaction step by step according
to suitable reaction that can be carried out. First,
when the intension of embrace is detected, the robot
stretches out its legs. After that it trims the shape of
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
646

upper leg according to the body shape of the patient.
Upper left in the Figure shows user approaching to
robot, then board sensor of the robot detects the
intension with the robot touch. Finally it controls its
leg and upper legs to fit the user body. Until now,
the performance of hugs is unnatural because it has
no outer skin and furry coat. In the near future, more
comfort hug method will be revised with the support
of outer skin.
Figure 17: Hugging.
5 CONCLUSIONS
The design of a robot having a cat character is
suggested in order to make positive treatment effects
for the ASD children. The operations related with
the various facial expressions and body gestures
with appropriate interaction between robot and
patient are suggested and implemented with analysis
of engineering issue. The suitable motors and
intelligent sensor system that can measure and
control the robot are also designed. The basic
emotional expression using facial movements for the
treatment are performed to express anger, sadness,
and surprise. Various types of treatment action are
also suggested using body, and legs like hugging,
eye contacts, and some behaviors. As shown in the
result, cat robot can express therapeutic action with
the proper interaction. In the future, more realistic
problem to control a robot will be studied with the
outer skin and appropriate artificial furry coat. In
addition, the realistic therapy program will be
designed after getting feedback from real treatment
place. These kinds of studies using face and body
parts of animal robot is expected to cause the
diversification of robot usages in the future.
ACKNOWLEDGEMENTS
This work was supported by the National Research
Foundation of Korea Grant funded by the Korean
Government (NRF-2013R1A2A2A04014808).
REFERENCES
Cho, K., Kwon, J., Shin, D., 2009. Trends of cognitive
robot based intervention for autism spectrum disorder,
Journal of Korean Association for person with autism,
9(2). pp 45~60
Feil-Seifer D, Matari´c M.J., 2008. B3IA: a control
architecture for autonomous robot-assisted behavior
intervention for children with autism spectrum disorders.
Proc. 17th IEEE Int. Symp. Robot Hum. Interact.
Commun. (RO-MAN 2008), Aug. 1–.3, Munich, Ger., pp.
328–.33. Piscataway, NJ: IEEE
Kim, K. H., Lee, H.S., Jang, S.J, Bae, M.J., Ku, H. J.,
2011. Exploring the Responses of Children Labeled
with Autism- Through Interactions with Robotic Toys.,
Journal of Special Education & Rehabilitation Science,
50(1) pp. 181~209,
Lee, H. S., Baek, S. S., Ku, H. J., Kang, W.S., Kim, Y. D.,
Hong, J. W., An, J.U., 2010. Experimental Research of
Interactions Between Children with Autism and Robots,
Journal of Emotional & Behavioral Disorders, 26(2) pp.
141~168.
Robins B, Dautenhahn K, Te Boekhorst R, Billard A.,
2005. Robotic assistants in therapy and education of
children with autism: Can a small humanoid robot help
encourage social interaction skills? Univers. Access Inf.
Soc. 4(2):105–120
Scassellati B,, Admoni, H., and Mataric, M., 2012,
Robot for use in autism research, Annu. Rev Biomed.
Eng, 14: 275-294
Kwon, J.Y., Mun, K.H, Lee, B.H., Jung, J.S., 2014. Devel
oping an initial model for an eco-friendly cat robot for t
he use of early treatment of autism spectrum disorder.
Proc. 4th Int. Conf. on Pervasive and Embedded Comp.
and Commun. (PECCS 2014), Jan,. 7–.9, Lisbon, Por.,
pp. 186-191.
Gillesen, J.C.C., Barakova, E.I., Huskens, B.E.B.M., Feijs,
L.M.G., 2011. From training to robot behavior:
Towords custom scenarios for robotics intraining
programs for ASD. 2011 IEEE Int. Conf. on
Rehabilitation Robotics, July 1,ETH Zurich Science
City, Switzerland.
Robotis, 2014,e-manual, http://support.robotis.com/en
MBED, 2014, https://mbed.org/platforms/mbed-LPC1768/
Hazewinkel, M., ed. 2001, "Spline interpolation",
Encyclopedia of Mathematics, Springer, ISBN 978-1-
55608-010-4.
DevelopmentofTherapeuticExpressionforaCatRobotintheTreatmentofAutismSpectrumDisorders
647
