
New Learning Rules for Three-layered Feed-forward
Neural Networks based on a General Learning Schema
Christina Klüver
1
and Jürgen Klüver
2
1
Department of Computer Science and Business Information Systems,
University of Duisburg-Essen, Essen, Germany
2
COBASC-Research Group, Department of Computer Science and Business Information
Systems, University of Duisburg-Essen, Essen, Germany
Abstract. We propose a general schema for learning rules in neural networks,
the General Enforcing Rule Schema (GERS), from which we infer new
simplified learning rules for in particular supervised learning of three-layered
feed-forward networks, namely Enforcing Rule Supervised ERS and ERS2.
These rules are comparatively simpler than the established rule of
Backpropagation and their performance is at least equivalent. The new rules are
compared with Backpropagation in different experiments; an additional
comparison is performed with real data for the prediction of parcel delivering.
1 Introduction
Most of the established learning rules for neural networks are, as is well known,
“Hebbian” ones, i.e. they are based on the principle of Hebb that learning is the
changing of connections between the (artificial) neurons. Although Hebb speaks of
the changing of “cells” rather than of connections [1] it seems safe to transfer his
principle to the changing of connections. In this sense Hebb may be called the
(unintentional) father of learning neural networks.
The Hebbian learning rules and their numerous variants have been applied for a
long time and they have frequently demonstrated their usefulness. Yet despite their
obvious success they have a slight methodical and theoretical blemish:
From a methodical point of view it seems a bit strange that the activation values or
output values of the neurons respectively are used on the one hand as cause variables
and on the other as performance variables. Consider, e.g., a standard version of the
Backpropagation rule, which we shall use also for comparison reasons:
j
f
j
'
net
j
t
j
o
j
, if j is an output neuron
f
j
'
net
j
k
w
ik
, if j is a neuron from the hidden layer
k
(1)
Here the activation or output value respectively of the neuron j represents as a part
of the learning rule a cause variable or an independent variable respectively. On the
other hand the performance of the network as a result of the application of the
learning rule is measured by the output values and that means the activation values of
the different output neurons. Hence the activation values are also used as performance
Klüver C. and Klüver J..
New Learning Rules for Three-layered Feed-forward Neural Networks based on a General Learning Schema.
DOI: 10.5220/0005125600270036
In Proceedings of the International Workshop on Artificial Neural Networks and Intelligent Information Processing (ANNIIP-2014), pages 27-36
ISBN: 978-989-758-041-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

variables or dependent variables.
To be sure, this double usage of the activation values is no logical circle. Yet it
seems rather redundant to use the activation values twofold. Hence it would be
desirable to construct learning rules where the activation or output values are used
only as performance variables. Mathematically the rules would become simpler,
which would be an advantage for teaching, programming, and application purposes.
In addition, from a theoretical point of view it is rather unsatisfactory that the
specific learning rules for different types of learning, particularly supervised learning
and self-organized learning, have not much in common, besides the general aspects of
Hebb’s principle. The Backpropagation rule as a paradigm for supervised learning for
example has on a first and second sight not much to do with the well-known “Winner-
takes all” rule that is used in Kohonen Feature Maps for self-organized learning.
Hence it would be desirable to construct a general learning schema that would be the
basis for learning rules, applied to different types of learning, and that is also based on
Hebb’s proven principle - in neuroinformatics and biology (cf. e.g. [6]).
In a formal sense its essence certainly is the increasing or decreasing respectively
of the weight values between sending neurons and a receiving artificial neuron, as
many learning rules take into account. By leaving out the output values of the
respective neurons we obtain a general learning schema in its simplest form as
w
ij
= c and 0 c 1.
(2)
The constant c has the same function as the learning rate in different standard
learning rules. If one uses for example the linear activation function
A
j
w
ij
A
i
,
(3)
then in large networks the activation values frequently become too large. In order to
avoid such an increasing equation (2) can be extended by introducing a “dampening
factor”. Then the schema becomes
w
ij
= c * (1 – w
ij
(t)
(4)
if w
ij
(t) is the according weight value at time t, i.e. before changing. The dampening
factor is used in order to keep the weight values in the interval (-1, 1).
Equations (2) and (4) are just schemas, namely the General Enforcing Rule
Schemas (GERS). The application to different types of learning needs in the two
types investigated by us, namely supervised learning and self-organized learning,
additional components. We chose these types of learning because they are by far the
most important ones in the usage of neural networks. By the way, when dealing with
reinforcement learning equation (4) can be used directly as the according learning
rule.
For example, an according learning rule for self-organized learning, which we
developed for a self-organized learning network (Self Enforcing Network, SEN), is
w(t+1) = w(t) + w and
w = c
*
v
sm
,
(5)
c is again a learning rate and v
sm
is the according value in a so-called semantical
matrix, i.e. the data base for the learning process (cf. [2]; [3]). Obviously this is a
direct application of GERS to this type of learning without taking into regard the
28

output values. The main emphasis in this article, however, is put on the application of
GERS to supervised learning, in particular learning of three-layered feed-forward
networks.
2 ERS – Enforcing Rule Supervised
Three-layered networks need as learning rules strictly speaking two components,
namely the variation of the weights between the hidden and the output layer and the
variation of the weights between the input layer and the hidden one. The first
component of our new rule is computed by
∆w
ij
c∗1‐w
ij
t
∗ δ
j
∗sgn
o
i
(6)
j
is of course the distance between the output neuron j and the respective component
in the target vector, i.e.
j
= t
j
– o
j
. Note that the factor sgn(o
i
) is used only as the sign
of the whole product; the absolute numerical value of o
i
does not matter. For brevity’s
sake we call this rule ERS – Enforcing Rule Supervised. The second component of
ERS is:
j
t
j
o
j
, if j is output neuron
w
jk
k
k
, else
(7)
For experimental and methodical purposes we also constructed a variant of ERS by
adding the factor o
i
:
∆w
ij
c∗ 1‐w
ij
t
∗ δ
j
∗o
i
(8)
This variant is more similar to the established rules because of the factor o
i
; for the
sake of brevity we call this variant ERS2. The computation of the weight variation
between the hidden and the output layer is the same as in equation (6).
Because we wished to compare ERS with standard learning rules we performed our
experiments also with a standard version of the Backpropagation Rule (BP), already
shown in equation (1).
1
There are numerous other versions of BP but we used the
standard version usually introduced in textbooks on neural networks (e.g. [5]).
Equation (7) shows that ERS and ERS2 are also “back propagating” rules as they
propagate the error to the weight values between input and hidden layer. Recently a
learning rule for multilayered feed forward networks has been proposed, namely a so-
called “No-Prop” algorithm, which just uses the Delta rule for the variation of the
weight values between output and hidden layer and leaves the other weight values
fixed [8]. As far as we know this algorithm has been analyzed just for a few
examples.
3 Experimental Design and Results
We analyzed the performance of ERS and ERS2 in comparison to BP with networks
1
Attempts to improve standard BP can be found, e.g., in Orr and Müller[4].
29
of different size and different topologies.
2
The input and target values are generated at
random from the interval between 0.00 and 1.00. The initial weight values of the
networks are also generated at random from the interval (-0.5, 0.5) or (-1, 1). A
learning process is considered as successful if 0 0.01. If such a value is not
reached after mainly 2.000 learning steps the learning run stops and is marked as
unsuccessful. In each single experiment ERS, ERS2, and BP got the same initial
matrix and the same input and target patterns. The learning rate c for ERS and ERS 2
was in the first series c = 0.2 and 0.4 respectively; when enlarging the networks we
decreased the learning rate to c = 0.04. In all experiments in the case of BP was
=
0.9. For error computation we used the Euclidean distance.
The activation function is tangent hyperbolicus tanh(x) for ERS and ERS2; for BP
we used the logistic function. To simplify the experiments we chose the same size of
the patterns as the number of patterns to be learned, i.e. if the networks had for
example to learn 20 patterns the patterns consisted of 20 components. When we speak
of “pattern” we mean strictly speaking a pair of patterns, namely an input pattern and
a target pattern.
The first experimental series was performed with 10 different patterns for each
network, generated at random. In all 1000 different tests were performed and the
maximal iteration number, i.e. number of learning steps, was limited to 2.000. Table 1
shows the results for the most suited topologies respectively for all learning rules; the
topologies are obtained from according experiments. The values given for the mean
refer to all experiments and only to successfully learned patterns; SD (standard
deviation) was computed for all experiments, i.e. also the unsuccessful ones. LR is the
learning rate and AF the respective activation function. Min / Max refers to minimal
or maximal learning steps respectively.
Table 1. Performance for “ideal” topologies; the numbers in the first line represent the numbers
of successful learning processes.
Learning Rule
Topology
Weight intervals
BP
10—25—10
(-1.0 , 1.0)
ERS
10—65—10
(-1.0 , +1.0)
ERS2
10—40—10
(-0.5 , 0.5)
Performance
LR /AF
Min / Max
Ø / SD
998
0.9 / logistic
38 / 1015
112 / 98
1000
0.1 / TanH
110 / 1282
241 / 85
1000
0.4 / TanH
47 / 1419
134 / 80
The next step was to test the performance of the learning rules with different
topologies and different intervals of the generated weight values. Table 2 shows the
results.
According to our experiments ERS and ERS2 need in general a larger number of
neurons in the hidden layer to reach better results than the BP networks. It might be
not by chance that Widrow et al. (loc. cit.) report the same result when comparing
their algorithm to BP.
2
Viktor Schäfer has implemented the Tool, which enables the comparison between the rules.
30
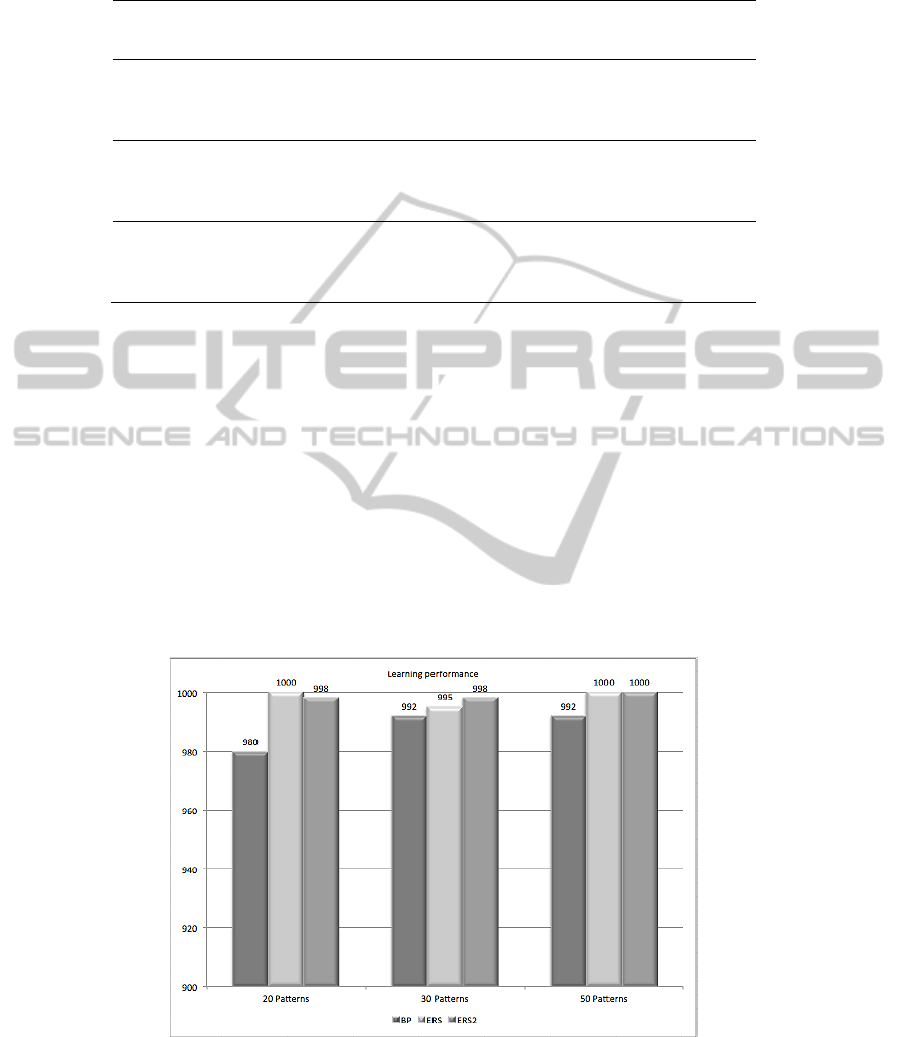
Table 2. Learning performance with 10 patterns and the same topologies.
Topology
Weight intervals
10
—30—10
(-0.5 , 0.5)
10—40—10
(-0.5 , 0.5)
10—50—10
(-0.3 , 0.3)
BP
LR /AF
Min / Max
Ø / SD
952
0.9 / logistic
304 / 4787
885 / 622
939
0.9 / logistic
290 / 6809
866 / 639
962
0.9 / logistic
208 / 4769
684 / 496
ERS
LR /AF
Min / Max
Ø / SD
934
0.2 / TanH
53 / 4746
310 / 468
982
0.2 / TanH
61 / 5857
205 / 240
998
0.2 / TanH
147 / 9255
778 / 857
ERS2
LR /AF
Min / Max
Ø / SD
998
0.4 / TanH
36 / 2798
140 / 160
1000
0.4 / TanH
38 / 660
127 / 71
989
0.4 / TanH
98 / 9942
625 / 1093
For the following experiments, we decided to make a compromise with respect to
the number of neurons in the hidden layer, i.e. the acceptable according number for
each learning rule, as a result of several samples.
The next figure shows the results for the learning processes with 20, 30, and 50
patterns. The two chief results are:
a) The speed, i.e. the number of learning steps, is approximately the same with all
learning rules. In some experiments BP was the fastest learning rule, in others ERS
and ERS2. Yet the differences are not significant in the sense that there is a general
trend, which rule is the best one.
b) In all experiments ERS and ERS2 are more reliable than BP, i.e. their number of
successfully completed learning processes is always larger than that of BP. Hence,
although the new learning rules ERS and ERS2 are not significantly faster than BP
they are obviously more reliable – an interesting result in particular for practical
applications of neural networks (see below the real data experiments).
Fig. 1. Learning performance with 20, 30, and 50 patterns.
31

Details can be seen in the following table:
Table 3. Learning performance: details.
Topology
Weight intervals
20
—60—20
(-0.5 , 0.5)
30—80—30
(-1.0 , 1.0)
50—100—50
(-1.0 , 1.0)
BP
LR /AF
Min / Max
Ø / SD
980
0.9 / logistic
344 / 4527
849.5 / 578.5
992
0.9 / logistic
337 / 3222
614 / 339
992
0.9 / logistic
467 / 3529
802 / 321
ERS
LR /AF
Min / Max
Ø / SD
1000
0.2 / TanH
251 / 6068
780 / 494.5
995
0.1 / TanH
230 / 3878
556.5 / 201
1000
0.03 / TanH
351 / 4114
978 / 492.5
ERS2
LR /AF
Min / Max
Ø / SD
998
0.3 / TanH
254 / 9970
1969.5 / 1414
998
0.2 / TanH
460/ 4468
1296.5 / 935
1000
0.04 / TanH
361 / 3274
666 / 287
For comparison purposes we repeated all experiments with an error rate of 0.000
for each pattern number and each topology. ERS and ERS2 were successful but only
with approximately twice iterations than in the previous experiments. The used
standard version of BP did not succeed at all, i.e. it only seldom reached the learning
goal. Additional parameters like momentum or decay would probably have been
necessary; it will be interesting if such parameters can also improve the performance
of ERS and ERS2.
4 A Case Study: Predictions of Parcel Delivering Times
A severe problem for all delivery services is to inform their customers about the
probable time the parcels and other products will be delivered to the customers. In
cooperation with DHL, the delivery service of the Deutsche Post, one of the biggest
logistic firms worldwide, we obtained real delivery data for several districts of Essen,
a large city in the West of Germany. The districts consist altogether of 20 streets. As
far as we know we were the first to attempt predictions with neural networks for the
problem of prognosticating different time intervals or time windows.
Our research question was two-fold, namely on the one hand to analyze if
successful predictions for delivery times in different streets are possible at all and on
the other hand which one of the three learning rules, compared in the experiments
above, reached the best prediction results.
In all three cases we used the same network topology, namely 34
—45—34. The
number of input and output neurons is due to the number of time intervals each day
was divided into. Hence each input and output neuron represents a certain time
interval. The training phase was 20 weeks; each day in a week was mapped to the
according day in in the next week. Hence we obtained for each day in a week a time
series of twenty components. For BP we used again the logistic function and a
learning rate of 0.9; for ERS we used a so-called logarithmic-linear function that was
newly developed by us (cf. [2]):
32
A
lg
A
1
∗w
, A
0
lg
|A
1
|
∗w
,A
0
(9)
The learning rate was 0.04; ERS2 had the tanh-function and a learning rate of 0.08.
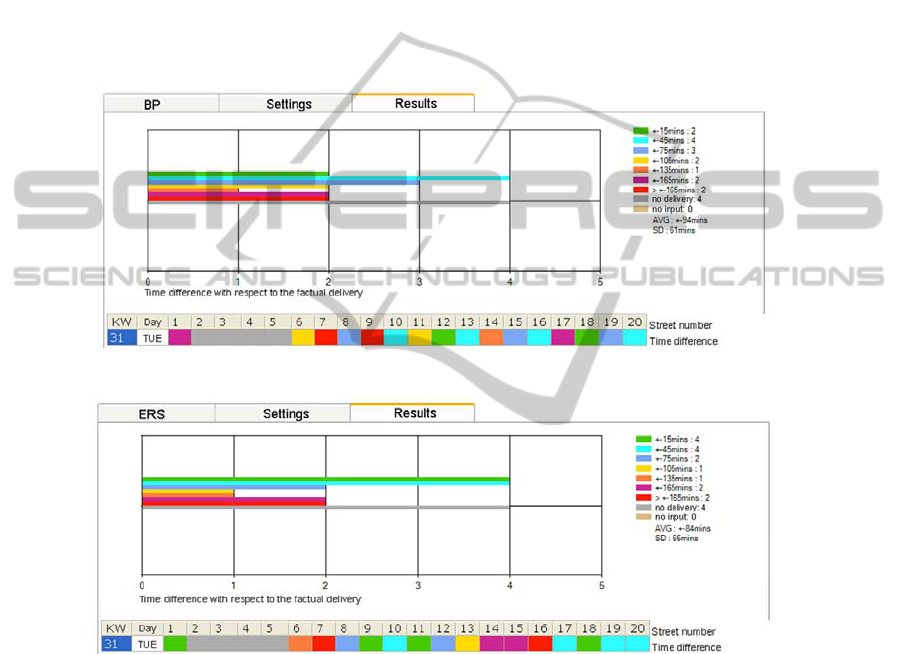
The following figure shows the performance of BP for Tuesday in week 31 (KW);
the numbers below the figure show how many predictions are characterized by a
specific time difference with respect to the factual delivery. For example, 2
predictions differed just 15 minutes from the factual time (top row), 4 predictions
differed 45 minutes (second row) and so on. The number of predictions is the
according mean of the 20 streets.
The next 2 figures show the performances of ERS and ERS2 for the same day:
Fig. 2. Prediction performance of BP for Tuesday.
Fig. 3. Prediction performance of ERS.
An additional remark is necessary: The figures show just the results for 16 time
intervals. This due to the fact that frequently no parcels were delivered at all; hence it
would be quite useless to compute a difference for such days between the predicted
time and the factually non-existent time. Therefore the prediction list is an adjusted
one, which is certainly not the fault of the different networks.
The results for the other days are nearly the same as those for Tuesday; the shown
results are in this way representative.
33
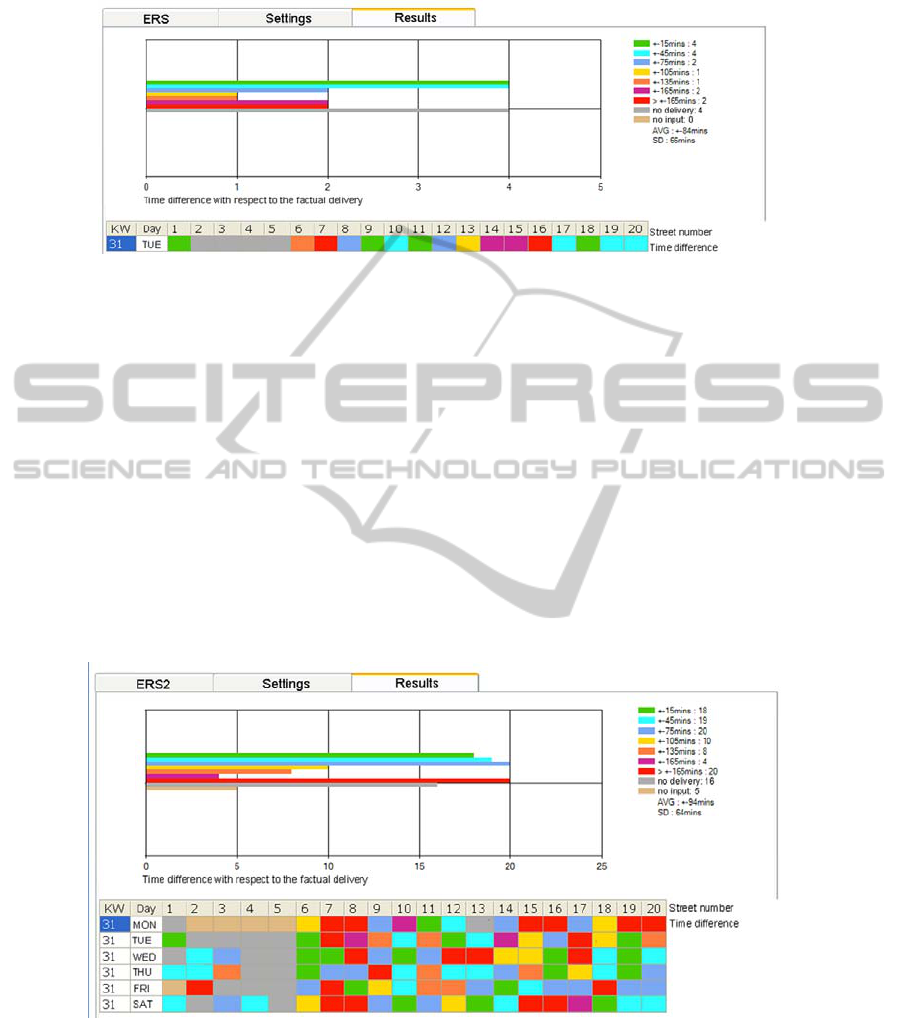
Fig. 4. Prediction performance of ERS2.
With respect to the first questions if such predictions are possible at all, the answer
is “to a certain degree”. The delivery experts at DHL commented on our results that
indeed delivery times permanently vary because of the changing of drivers, choosing
different routes by the drivers, possibility of traffic jams and road works, differences
between customers who frequently and those who only seldom receive parcels, and
other factors. The opinion of the experts in general was that our results could probably
still be improved but that these results are significantly better than their own
estimates. Hence further cooperation will be arranged.
The answer to the second question generally confirms the results of the
experiments described above. All three learning rules perform with a comparable
success. BP and ERS2 are rather similar in their prediction successes; ERS is more
successful, i.e. it generated slightly more very good predictions. Hence this case study
is another indicator that at least ERS is a bit more reliable than BP.
Finally we show in addition the mean of the performance values for all streets and
all days of the week that should be predicted. Fig. 5 contains the results of ERS:
Fig. 5. Mean values of ERS in detail.
The next table shows the results for all learning rules:
34

Table 4. Comparison of the mean values of the different rules.
Time
difference:
±15 ±45 ±75 ±105 ±135 ±165 >±165
No
delivery
No
input
AVG SD
BP 16 16 25 11 9 6 16 16 5 ± 94 60
ERS 18 19 20 10 8 4 20 16 5 ± 94 64
ERS2 20 17 19 9 9 5 20 16 5 ± 95 65
These results show that the trend demonstrated for Tuesday is indeed
representative. The DHL experts again assured us that they were not able to produce
comparable results.
5 CONCLUSION
To sum up, both ERS versions performed at least as well as BP. The general trend in
all experiments and in the case study is unambiguous: ERS and ERS2 seem to be
quite suited to solve complex learning problems at least as well as the established
learning rule, namely BP. The main differences between the rules are on the one hand
that ERS and ERS2 operate well with a small learning rate, which should be even
decreased if the networks become larger. BP in contrast always needs a rather large
learning rate. One has to take into account, though, that frequently the size of the
learning rate depends on the selection of the activation function (e.g. [7]). In our
experiments ERS and ERS2 performed best with tanh and BP with the logistic
function; in the case study we chose the new logarithmic-linear function for ERS,
which performed rather well, and which we already had successfully applied in our
new self-organized learning network [2, 3].
On the other hand both ERS versions perform best with rather large hidden layers;
BP in contrast usually needs only smaller ones. It is probably not by chance that
Widrow [8] (loc. cit.), as remarked, report a similar result from their experiments with
the No-Prop algorithm and BP; further investigations will possibly explain this
remarkable concordance.
Of course several methodical caveats must be taken into consideration. These
results confirm that ERS and ERS2 are able to solve different learning tasks as far as
we have them analyzed. Yet the results are from samples with certain topologies and
from a specific real data case study and they cannot claim to be representative in the
sense that, e.g., ERS and ERS2 are always as fast as BP or for each problem more
reliable than BP. After all, BP has been tested in its different versions for more than
two decades and with the two versions of ERS we are just in the beginning. Other
parameters like other activation functions, different topologies, e.g. short cuts, more
levels, introduction of momentum and decay, or other versions of BP should be
investigated too, which we shall undertake in the near future. In addition, the
influence of parameters like momentum on the two ERS rules should and will be
analyzed too.
It might well be, by the way, that there are classes of learning problems where BP
is significantly better than ERS or ERS2, but it might also be that there are other
problem classes where ERS or ERS2 should be preferred. Without doubt ERS and
35

ERS2 are comparatively simpler than BP and hence also simpler to program; in
particular ERS and ERS2 do not need any external parameters like, e.g., momentum.
According to our didactical experiences BP is usually rather difficult for students of
computer science to understand. Teaching ERS and ERS2 as an alternative to BP will
be an interesting didactical experience; Widrow [8] stress for the same reasons the
comparative simplicity of the No-Prop algorithm as an advantage with respect to BP.
To emphasize it again, we do not mean that BP or the Delta rule become obsolete
because of our new learning rules. These established learning rules have been
analyzed and applied for many years and they will be always useful and necessary
algorithms. ERS and ERS2 for three-layered or more-layered feed forward networks
might be additional useful tools for users of neural networks – not more but also not
less.
References
1. Hebb, D.O.: The Organization of Behavior. Wiley, New York (1949)
2. Klüver, C., Klüver, J.: Self-organized Learning by Self-Enforcing Networks. In: Rojas I,
Joya G, Cabestany J (eds.): IWANN 2013, Part I, Lecture Notes in Computer Science Vol.
7902, Springer, Berlin Heidelberg (2013) 518–529
3. Klüver, C., Klüver, J.: OSWI: A consulting system for pupils and prospective students on
the basis of neural networks. In: AI & Society. Springer-Verlag, London (2014) DOI
10.1007/s00146-014-0542-y
4. Orr, G., Müller, K.: Neural Networks: Tricks of the Trade, Springer, Berlin Heidelberg
New York (1998)
5. Patterson, D.: Artificial Neural Networks, Theory and Applications. Prentice Hall, New
Jersey (1996)
6. Seung, S.: Connectome. Houghton Mifflin Harcourt, Boston New York (2012)
7. Thimm, G., Fiesler, E.: Optimal Setting of Weights, Learning Rate, and Gain. IDIAP-
Research Report 04-1997 http://publications.idiap.ch/downloads/reports/1997/rr97-04.pdf
(1997)
8. Widrow, B., Greenblatt, A., Kim, Y., Park, D.: 2013. The No-Prop algorithm: A new
learning algorithm for multilayer neural networks. Neural Networks 37. Elsevier Science
Ltd, Oxford (2013) 182–188
36
