
Building Poker Agent Using Reinforcement Learning
with Neural Networks
Annija Rupeneite
Faculty of Computing, University of Latvia, 19 Raina blvd., LV-1586 Riga, Latvia
Keywords: Poker Game, Reinforcement Learning, Neural Networks.
Abstract: Poker is a game with incomplete and imperfect information. The ability to estimate opponent and interpret
its actions makes a player as a world class player. Finding optimal game strategy is not enough to win poker
game. As in real life as in online poker game, the most time of it consists of opponent analysis. This paper
illustrates a development of poker agent using reinforcement learning with neural networks.
1 STAGE OF THE RESEARCH
Poker is a game with incomplete and imperfect
information. The ability to estimate opponent and
interpret its actions makes a player as a world class
player. Finding optimal game strategy is not enough
to win poker game. As in real life as in online poker
game, the most time of it consists of opponent
analysis.
Author is working on development of poker
agent that would find optimal game strategy using
reinforcement learning (RL) in combination with
artificial neural network (ANN) for value function
approximation.
2 OUTLINE OF OBJECTIVES
This paper illustrates a development of poker agent
using reinforcement learning with neural networks.
Complete poker agent should have an ability to
create optimal game strategy that makes decisions
based on information:
Hand strength/potential estimation;
Table card estimation;
Opponent hand strength prediction;
Opponent classification (tight/loose - passive/
aggressive);
Current state evaluation using neural network.
AI Poker agent should be able to find an optimal
strategy by itself (unsupervised learning) using
information given above. It also should be able to
adapt opponent play style and change its strategy
during the game.
3 RESEARCH PROBLEM
Games are to AI as grand prix racing is to
automobile design.
Poker game has become a field of interest for
artificial intelligence technologies. There are some
concealed cards in the game that makes impossible
to calculate the final outcome of the hand.
Therefore, artificial intelligence approach is used
more often to develop online poker agents.
Poker game can be defined as a partially
observable Markov decision process (POMDP).
There is no complete and ready solution for
POMDP. Reinforcement learning technologies allow
to create an agent for Markov decision process
(MDP), but it can’t make model for POMDP - it is
impossible to define current state and calculate value
function in uncertain environment. To solve
POMDP with reinforcement learning neural network
is used for value function approximation. Value
function approximation with neural network allows
to estimate a current state in uncertain environment.
Most of the known research work on poker game
with AI includes opponent model with neural
networks (Davidson, 1999) or reinforcement
learning for finding optimal game strategy (Teófilo,
Reis, Cardoso, Félix, Sêca, Ferreira, Mendes,Cruz,
Pereira, Passos, 2012). However none of them uses
22
Rupeneite A..
Building Poker Agent Using Reinforcement Learning with Neural Networks .
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
both these technologies together. Reinforcement
learning together with neural networks have
successfully been applied for different control
problems - control of gas turbine (Schafer, 2008)
and motor-control task (Coulom, 2002).
Given research describes poker agent
development using RL with ANN.
4 STATE OF THE ART
Texas Hold’em is one of the most popular forms of
poker. It is also a very complex game. There are
several factors that make poker game as uncertain
environment (concealed cards, bluffing). These
characteristics make poker partially observable
Markov Decision process that has no ready solution.
Reinforcement learning together with neural
network for value function approximation provides a
solution for uncertain environment agent. This paper
gives a brief description of information needed to
develop agent poker game:
Poker game rules;
Definition of the partially observable Markov
decision process;
Neural network theory;
Reinforcement learning theory.
4.1 Poker Game
Poker is a game of imperfect information in which
players have only partial knowledge about the
current state of the game (Johanson, 2007). Poker
involves betting and individual play, and the winner
is determined by the rank and combination of cards.
Poker has many variations - in experiments, and data
analyses author uses Texas hold’em poker game
version. Texas hold’em consists of two cards dealt to
player and five table cards. Texas hold’em is an
extremely complicated form of poker. This is
because the exact manner in which a hand should be
played is often debatable. It is not uncommon to
hear two expert players argue the pros and cons of a
certain strategy (Sklansky, Malmuth, 1999).
Poker game consists of 4 phases - pre-flop, flop,
turn, river. On the first phase (pre-flop) two cards
are dealt for every player. On the second phase
(flop) three table cards are shown. On next phase
(turn) fourth card is shown and finally on the last
phase (river) table fifth card is shown and winner is
determined. Game winner is a player with the
strongest five card combination. Possible card
combinations are (starting from the highest rank)
Straight flush, Royal flush, Four of a kind, Full
house, Flush, Straight, Three of a kind, Two pair,
One pair, High card.
4.2 Partially Observable Markov
Decision Process
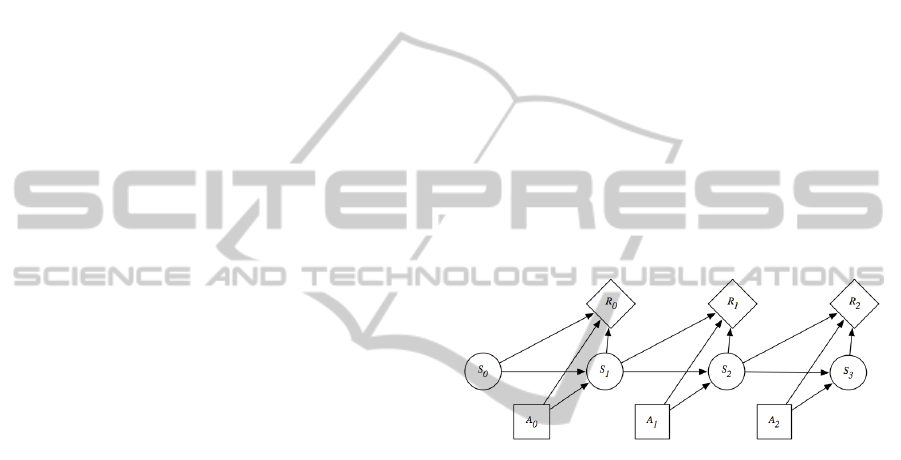
Markov decision process can be described as a tuple
(S, A, P, R), where
S, a set of states of the world;
A, a set of actions;
P:S×S ×A →[0,1], which specifies the
dynamics. This is written P(s'|s,a), where
∀s ∈S ∀a ∈A ∑s'∈S P(s'|s,a) = 1.
In particular, P(s'|s,a) specifies the probability of
transitioning to state s' given that the agent is in a
state s and does action a.
R:S×A ×S →R, where R(s,a,s') gives the
expected immediate reward from doing action
a and transitioning to state s' from state s
(Poole and Mackworth, 2010).
Figure 1: Decision network representing a finite part of an
MDP (Poole and Mackworth, 2010).
Partially observable Markov decision process is a
formalism for representing decision problems for
agents that must act under uncertainty (Sandberg,
Lo, Fancourt, Principe, Katagiri, Haykin, 2001).
POMDP can be formally described as a tuple (S,
A, T, R, O, Ω), where
S - finite set of states of the environment;
A - finite set of actions;
T: S × A → ∆(S) - state-transition function,
giving a distribution over states of the
environment, given a starting state and an
action performed by the agent;
R: S × A → R - the reward function, giving a
real-values expected immediate reward, given
a starting state and an action performed by the
agent;
Ω - finite set of observations the agent can
experience;
O: S × A → ∆(Ω) - the observation function,
giving a distribution over possible
observations, given a starting state and an
action performed by the agent.
BuildingPokerAgentUsingReinforcementLearningwithNeuralNetworks
23
Poker game can be described as POMDP - there are
concealed cards during the game what makes it
partially observable. This characteristic makes poker
game as testbed for AI research - there is no
mathematical model for optimal game strategy.
4.3 Neural Networks
A neural network is a massively parallel distributed
processor that has a natural propensity for storing
experiential knowledge and making it available for
use. It resembles the brain in two respects:
1. Knowledge is acquired by the network through a
learning process.
2. Interconnection strengths known as synaptic
weights are used to store the knowledge (Haykin ,
1999).
Basically, learning is a process by which the free
parameters (i.e., synaptic weights and bias levels) of
a neural network are adapted through a continuing
process of stimulation by the environment in which
the network is embedded (Sandberg, Lo, Fancourt,
Principe, Katagiri, Haykin, 2001).
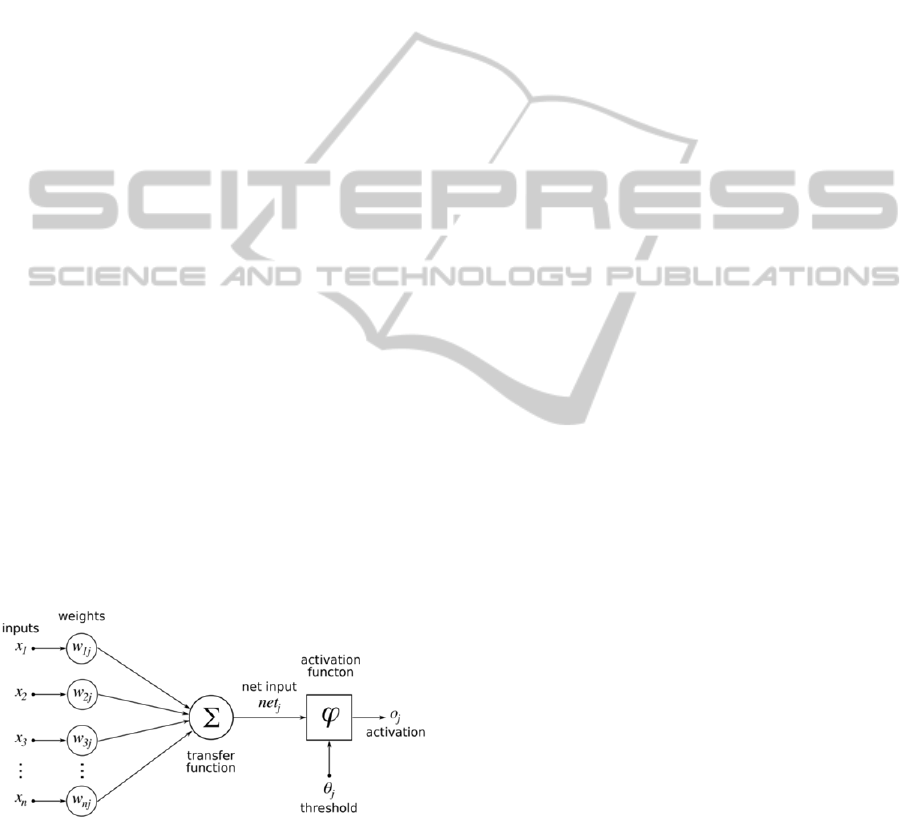
Neural network has interconnections between
neurons in different layers. The first layer has input
neurons, which send data via synapses to the next
layer of neurons and so on till the last layer of
neurons. Neural network is described by parameters:
Interconnection pattern between different
layers of neurons;
Learning process for updating weights;
Activation function that calculates neuron
output from input with weights.
Figure 2: Basic structure of an Artificial Neural Network
(ANN).
In the given research neural network technology
is used for several purposes:
To model opponent based on previous actions;
For value function approximation with
reinforcement learning.
4.4 Reinforcement Learning
Reinforcement learning (RL) is learning what to do -
how to map situations to actions - so as to maximize
a numerical reward signal. The learner is not told
which actions to take, as in most forms of machine
learning, but instead must discover which actions
yield the most reward by trying them. In the most
interesting and challenging cases, actions may affect
not only the immediate reward but also the next
situation and, through that, all subsequent rewards.
(Sutton & Barto , 1998).
These characteristics is the most important
reason why RL is used to make different game
programs. For example, in 1995, G.Tesauro created
TD-Gammon program for game of Backgammon,
where innovation was in the method how it learned
its evaluation function (Tesauro, 1995).
RL problem can be formalized as follows. The
environment is modeled as a stochastic finite state
machine with inputs (actions sent from the agent)
and outputs (observations and rewards sent to the
agent):
State transition function P(X(t)|X(t-1),A(t));
Observation (output) function P(Y(t) | X(t),
A(t));
Reward function E(R(t) | X(t), A(t)).
The agent's goal is to find a policy and state-
update function so as to maximize the expected sum
of discounted rewards (Murphy, 1998).
There are several RL algorithms to solve
problems described as MDP. Learning approaches
can be classified as indirect learning and direct
learning. Direct learning includes a value-function
based learning - temporal difference (TD) learning,
Q-learning. In this research, author focuses on value-
based methods.
Value Functions are state -action pair functions
that estimate how good a particular action will be in
a given state, or what the return for that action is
expected to be.
The value of taking action a in the state s under
a policy π is called Q-value denoted as Qt(st,at).
Reinforcement learning model consists of:
1. a set of possible states, represented by S;
2. a set of actions, A;
3. a set of numerical rewards R (Patel and
Barve, 2014).
In Q-learning and related algorithms, an agent
tries to learn the optimal policy from its history of
interaction with the environment. Q*(s,a), where a is
an action and s is a state, is the expected value
(cumulative discounted reward) of doing a in the
state s and then following the optimal policy.
ICINCO2014-DoctoralConsortium
24
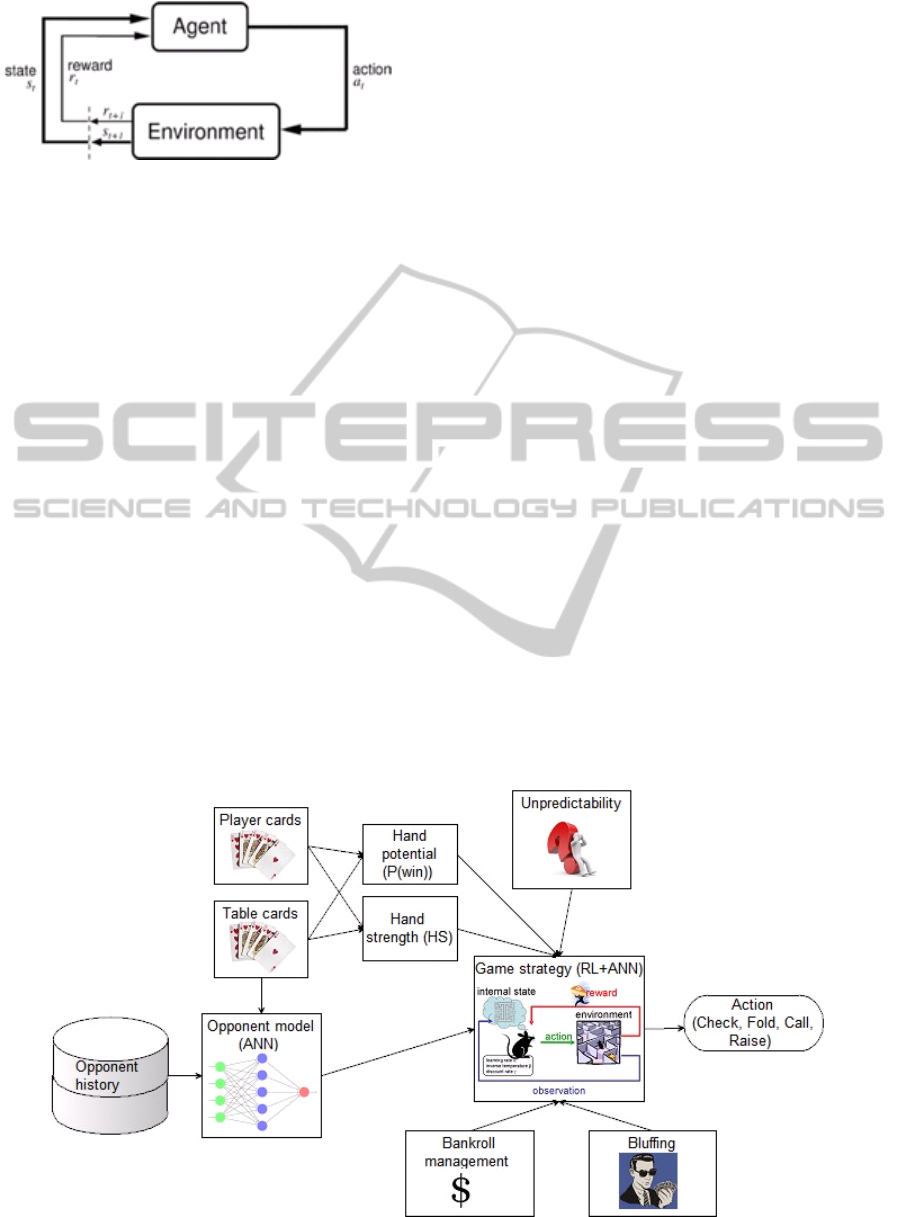
Figure 3: Standard Reinforcement Learning Model. (Patel
and Barve, 2014).
Q-learning uses temporal differences to estimate
the value of Q*(s,a). In Q-learning, the agent
maintains a table of Q[S,A], where S is the set of
states, and A is the set of actions. Q[s,a] represents
its current estimate of Q*(s,a) (Poole and
Mackworth, 2010).
Reinforcement learning technologies allow
Markov decision process agent development, but
standard RL algorithm can’t solve POMDP because
of uncertainty and lack of information about the
current state.
4.5 Related Work
There have been many different approaches in
online poker agent development. They can be
classified as AI based or based on mathematics and
statistics. University of Alberta Computer Poker
Research Group has developed several online poker
agents that use game theory approach (Nash
equilibrium), statistics and also there are some
modification's using artificial neural networks: Loki
(1997), Poki - improved Loki (1999) PsOpti/Sparbot
(2002), Vexbot (2003), Hyperborean (2006), Polaris
(2007), Hyperborean (2007), Hyperborean Ring
(2009).
There are also several research works that use
only AI technologies. For example, Néill Sweeney,
David Sinclair in their work "Applying
Reinforcement Learning to Poker" describes the
application of basic reinforcement learning
techniques to the game of multi-player limit hold'em
poker. A.Davidson, D.Billings, J.Schaeer, D.Szafron
in their work "Improved Opponent Modeling in
Poker" reports progress achieved by improved
statistical methods, which were suggested by
experiments using artificial neural networks.
None of these experiments have used
reinforcement learning together with artificial neural
networks to develop poker agent.
There are some research works using
reinforcement learning with neural network for
value function approximation in other areas. Anton
Maximilian Schafer in his research work
"Reinforcement Learning with Recurrent Neural
Networks" has shown successful application of these
technologies for controlling a high-dimensional
dynamic system with continuous state and action
spaces in partially unknown environment like a gas
turbine.
5 METHODOLOGY
Given research describes poker agent developed
using several AI technologies - reinforcement
Figure 4: Poker agent architecture.
BuildingPokerAgentUsingReinforcementLearningwithNeuralNetworks
25

learning and neural networks. To be a world class
poker player it is not enough to optimize only one
part of game. Good poker agent should be able to
process different type information to make a
decision about action. This information includes:
Hand potential evaluation;
Hand strength evaluation;
Bankroll management;
Opponent modeling;
Unpredictability;
Bluffing.
Based on information given above poker agent
should choose action - check, fold, raise or call. Full
poker agent model is shown in Figure 4. Author
examines first four information types in this
research.
5.1 Hand Strength and Potential
The hand strength (HS) is the probability that a
given hand is better than that of an active
opponent.(Felix,Reis, 2008)
To quantify the strength of a poker hand where
its result expresses the strength of a particular hand
in percentile (i.e. ranging from 0 to 1), compared to
all other possible hands Effective Hand Strength
(EHS) algorithm is used. Algorithm conceived by
computer scientists Darse Billings, Denis Papp,
Jonathan Schaeffer and Duane Szafron.
Hand potential is calculated:
P(win) = HS x (1 - NPot) + (1-HS) x PPot. (1)
Where
P(win) - probability of winning at the
showdown;
HS - current Hand Strength (not taking into
account potential to improve or deteriorate,
depending on upcoming table cards);
NPot - negative potential (probability that
current hand, if the strongest, deteriorates and
becomes a losing hand);
PPot - positive potential (probability that
current hand, if losing, improves and becomes
the winning hand) (Felix,Reis, 2008).
5.2 Opponents’ Modeling
There are many research work done which prove
that opponent exploration is one of the key factors
for a good poker player (Felix, Reis, 2008 ).
In the given research, 2 approaches are combined
for opponent modeling - opponent classification and
for opponent modelling - opponent classification and
opponent’s hand strength evaluation. Opponent
classification by play style is quite simple - it can be
calculated by a formula, but to predict opponent’s
hand strength neural network technology is used.
Neural networks allow to process different input
data to get approximate assessment of hand strength.
5.2.1 Opponent Classification
Poker player can be classified under four categories
of playing styles. Each style describes the frequency
of play and how the player bets. Playing styles are
loose/passive, tight/passive, loose/aggressive and
tight/aggressive.
Loose/Tight Play Style
A tight player plays few hands and often folds.
These players limit their play to only the best
starting hands. Loose players play with a wide range
of hands - they play many hands and are at the
center of the action.
Player can be classified by loose/tight by percent
of games they have played:
Tight - plays <28% hands;
Loose - plays >=28% hands.
Aggressive/Passive Play Style
Aggressive players bet and raise a lot and almost
never check or call, but passive players usually
check and call - they follow the action rather than
take the lead. Aggressive players can win hands,
even if they don’t have the best cards.
Player can be classified as Aggressive or Passive
by aggression factor (AF) (Li,2013). AF can be
calculated with the formula:
AF = NumRaises/NumCalls. (2)
Where
NumRaises – number of hands raised;
NumCalls – number of hands called.
Player is classified as aggressive if AF >1 and
passive if AF <=1.
Table 1: Player classification by play style (Felix, Reis,
2008).
AF<=1 AF>1
%GP>=28
Loose
Passive
Loose
Aggressive
%GP<28
Tight
Passive
Tight
Aggressive
ICINCO2014-DoctoralConsortium
26
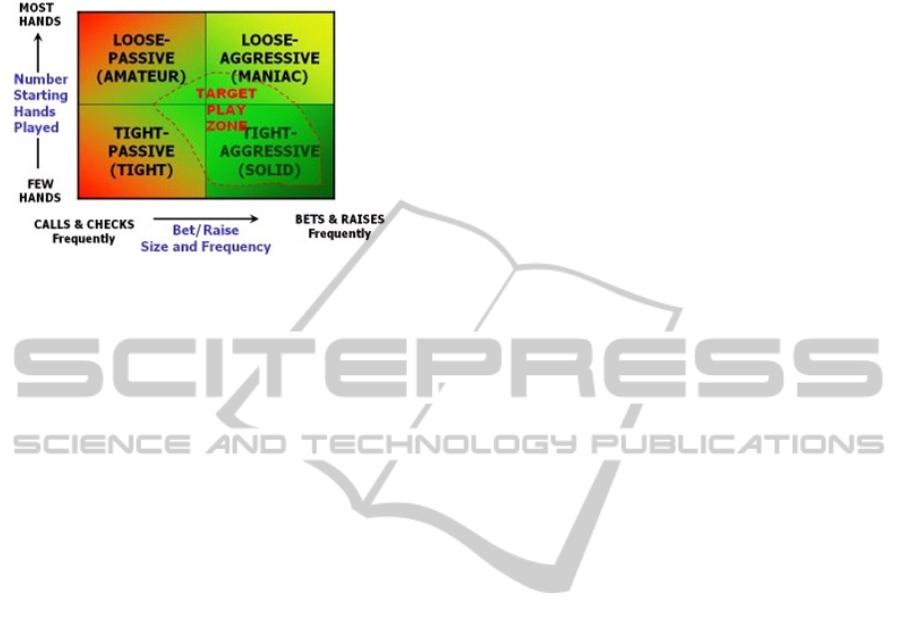
Figure 5 shows player classification and target play
zone for the agent.
Figure5: The hand strength (HS) is the probability that a
given hand is better than that of an active opponent.(Felix,
Reis, 2008).
5.2.2 Opponent Modeling using Neural
Networks
In the research, neural network - AI technology is
used to predict opponent hand strength. Neural
network has the ability to generalize data - a trained
network can classify data from the same class as the
learning data. Neural networks process information
in a similar way the human brain does. The network
is composed of a large number of highly
interconnected processing elements (neurons)
working in parallel to solve a specific problem.
Neural networks learn by example (Stergiou,
Siganos, 1995).
Multilayer feed-forward neural network
architecture with supervised learning was used for
the poker opponent model. Real online game poker
data was used for experiments. Data consisted of
more than 700 000 Texas hold‘em poker game
hands in a raw text format. Neural network system
was created to predict opponent’s hand strength,
which would help a player to make a decision.
Data pre-processing is very important to achieve
good results from machine learning technologies,
including neural network.
To get structural and readable data, text files
were processed and imported into MS SQL
database. Data contained:
Player action in every poker phase;
Table cards;
Table pot size;
Every player pot size;
Winner player;
Player identifier;
Cards for players, who made a showdown.
Given data was processed and transferred into a
table that was used as input data for neural network:
Hand and player identifier;
Hand date and time;
Player and table chip count;
Player action done;
Flag if player won hand;
Flag if hand date is on weekend;
Flag if only 2 players are left on river phase;
Flag if player had won in last 10 games;
Flag if player had ever bluffed;
Table cards and player card;
Table cards strength evaluation;
Player cards strength evaluation.
Processed data was split into 2 parts - training
data (80%), validation data and test data (20%). To
analyze input data impact on results several
combinations of input data was used.
Good poker opponent model is a part of good
poker agent. Given results shows that neural
network can predict poker opponent card strength in
78% of hands. Given neural network can be used to
help with making the decision in poker game. Given
experiments shows that input data have a huge
impact on network result, and it can be improved by
adding more pre-processed input data.
5.3 Game Strategy
Good poker game strategy should consider
information above for making decision how to act
(check, call, raise and fold). Algorithm for complex
game such as poker should be able to estimate whole
game result and possible total reward (not optimize
one game phase).
Reinforcement learning provides technology to
develop such model if game can be described as the
Markov decision process.
Reinforcement learning can’t be directly applied
to poker game because of uncertainty. Poker game
state can’t be calculated, and we can’t define value
function. Instead of formula for action function
approximation can be used. We can make value
function approximation in poker game based on
information available. Such information is: number
of players, place on the table, table cards, hand
strength, hand potential, opponent classification and
opponent’s hand strength evaluation. To get such
value approximation we need technology that can
form function with noisy, multidimensional data.
Artificial neural network is such technology.
Aim of this research is to develop a model that
can find optimal game strategy using reinforcement
BuildingPokerAgentUsingReinforcementLearningwithNeuralNetworks
27
learning and neural network for value function using
input data described above. Author has developed
simple RL model with NN value function that can
find optimal game strategy in 2 player poker game.
5.4 Agent Evaluation
To evaluate developed poker game agent various
approaches will be used. AI poker game play results
will be compared to 3 different poker agents that are
developed during the research:
1) Random poker player;
2) Safe-game poker player;
3) Game strategy obtained from poker
professionals.
Random poker player is a computer program that
chooses action with random number generator.
Safe-game poker player is a strategy obtained
from several poker rooms and poker tutorials for
beginners. This approach is based on a theory of
Probability - all 2 card hands are rated on a 0 to 40
scale.
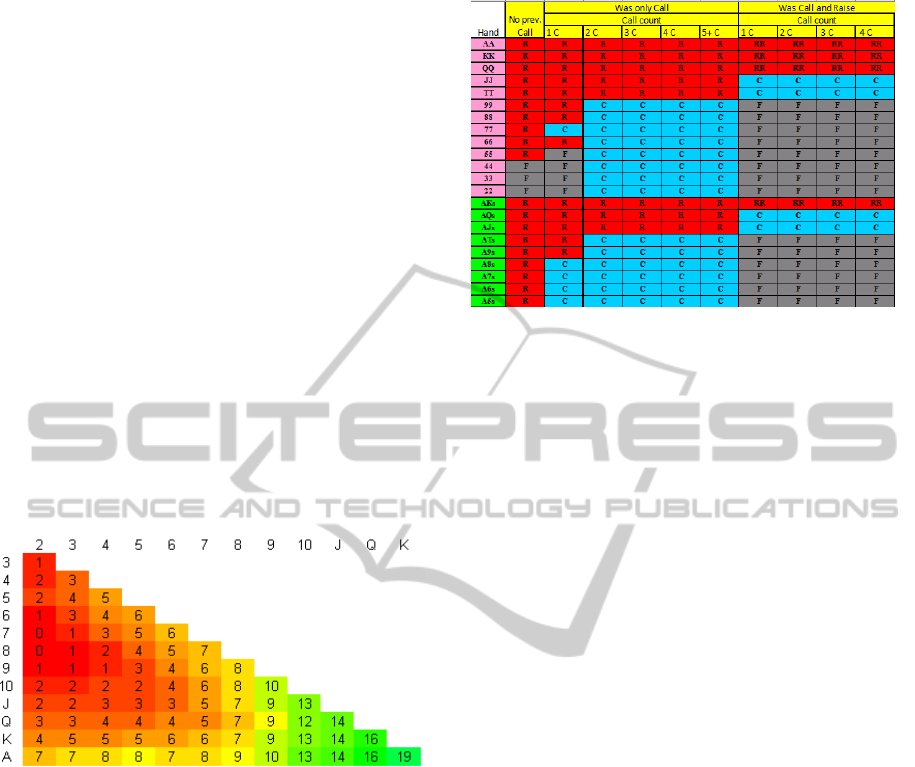
Figure 6: Unsuited Cards Power Rating
(http://wizardofodds.com).
For example, Figure 6 shows power rating for
each initial different suit 2-card hand if cards are
from different suits. This strategy says, that player
should play if hand rate is at least 13 or play with
rate 19 in early position, but 10 in late position.
Game strategy obtained from poker
professionals is similar to the Safe-game poker
player, but it has a more detailed description for
each game phase - action depends on player’s
position on the table and previous opponent’s
actions. This strategy is obtained by combining
several poker professional strategies (Hilger, 2003
and Sklansky, 2005). Figure 7 shows middle
position player strategy. For example, table shows
that player with hand of the same suit ace and king
should raise if there is no previous call or raise or
there has been only raise, but it should re-raise if
other players have raised and called.
Figure 7: Game strategy for middle position.
Author has developed 3 type computer poker
players that allow to compare and evaluate AI poker
agent results.
6 EXPECTED OUTCOME
Based on reinforcement learning in combination
with neural network techniques for problem solving,
author proposed online poker agent development.
This approach allows to solve poker game strategy
optimization problem which can be described as
POMDP.
Complete poker agent should be able to process
following information for optimal strategy finding
with RL:
Hand potential and strength;
Opponent play style (classification);
Opponent hand strength evaluation with ANN:
Value function approximation with ANN.
The future work tends to improve the neural
network opponent model to achieve more precise
prediction results. Several neural networks with
different input data will be tested to find out the best
one for the RL poker agent. Additionally testing for
the proposed approach in different scenarios and
with different learning data will be done.
REFERENCES
Coulom M.R., 2002. Reinforcement Learning Using
Neural Networks, with Applications to Motor Control.
PhD thesis, Institut National Polytechnique de
Grenoble.
Davidson A., 1999. Using Artifical Neural Networks to
Model Opponents in Texas Hold'em. University of
Alberta
ICINCO2014-DoctoralConsortium
28

Davidson A., Billings D., Jonathan Schaeer, Duane
Szafron, 2002. Improved Opponent Modeling in
Poker. Artificial Intelligence - Chips challenging
champions: games, computers and Artificial
Intelligence Volume 134 Issue 1-2.
Felix D., Reis L.P., 2008. An Experimental Approach to
Online Opponent, Modeling in Texas Hold'em Poker.
Advances in Artificial Intelligence –SBIA 2008.
Félix D. and Reis L.P., 2008. Opponent Modelling in
Texas Hold’em Poker asthe Key for Success. ECAI
2008.
Haykin S.S., 1999. Neural networks : a comprehensive
foundation. Upper Saddle River, NJ : Prentice Hall.
Hilger M., 2003, Internet Texas Hold'em: Winning
Strategies from an Internet Pro. Dimat Enterprises,
Inc.
Johanson M., 2007. Robust strategies and
counterstrategies: Building a champion level
computer poker player. In Masters Abstracts
International, volume 46.
Li A., 2013. Enhancing Poker Agents with Hand History
Statistics. Bachelor-Thesis, Technische Universitat
Darmstadt.
Murphy K.P., 1998. A brief introduction to reinforcement
learning. University of British Columbia.
Patel J.R. and Barve S.S., 2014. Reinforcement Learning:
Features and its applications, International Journal of
Computer Technology and Applications, volume 5
Issue 3.
Poole D. and Mackworth A., 2010. Artificial Intelligence:
Foundations of Computational Agents. Cambridge
University Press.
Sandberg I.W., Lo J.T., Fancourt C.L., Principe J.C.,
Katagiri S., Hayk S., 2001. Nonlinear Dynamical
Systems: Feedforward Neural Network Perspectives.
John Wiley & Sons,
Sklansky D, Malmuth M., 1999. Hold’em Poker For
Advanced Players.Two Plus Two Pub.
Sklansky D., 2004. The Theory of Poker, Two Plus Two
Publishing.
Stergiou C. and Siganos D., 1995. Neural Networks,
Surprise 96 Volume 4 (Final Reports).
Sutton R.S. and Barto A.G., 1998. Reinforcement
Learning: An Introduction. The MIT Press.
Szepesvari C., 2010. Algorithms for Reinforcement
Learning. Morgan and Claypool Publishers.
Sweeney N., Sinclair D., 2012. Applying Reinforcement
Learning to Poker.Compter Poker Symposium.
Teófilo L.F., Reis L.P., Cardoso H.L., Félix D., Sêca R.,
Ferreira J., Mendes P., Cruz N., Pereira V., Passos N.,
2012. Computer Poker Research at LIACC. 2012
Computer Poker Symposium at AAAI.
Tesauro G., 1995. Temporal Difference Learning and TD-
Gammon. Communications of the ACM, March 1995 /
Vol. 38, No. 3.
BuildingPokerAgentUsingReinforcementLearningwithNeuralNetworks
29
