
A Computational Algorithm for Dynamic Regrasping Using
Non-dexterous Robotic End-effectors
Avishai Sintov
∗
and Amir Shapiro
Department of Mechanical Engineering, Ben-Gurion University of the Negev, Beer-Sheva, Israel
1 STAGE OF THE RESEARCH
The presented research addresses the problem of re-
grasping an object. That is, to switch between grasp
configurations according to designated tasks to be
done. The state of the art in regrasping methods is
mostly quasi-static motions which requires high dex-
terous end-effectors. This research intends to ap-
proach the regrasping problem with dynamic ma-
nipulations. That is, utilize the dynamics of the
robotic arm to perform the regrasping operation while
grasping the object with a simple non-dexterous end-
effector.
As will be discussed further, in this research we
intend to perform the dynamic regrasping with two
strategies, one is the in-hand spinning and the other
is the mid-air flipping. Currently, an algorithm for
motion planning of the in-hand spinning strategy was
developed. While approaching the problem and its
constraints, a method for dynamic motion planning
was needed. We surveyed methods which could
enable planning under kinematic and dynamic con-
straints and incorporate rendevouze planning of two
systems (arm and manipulated object). First, the
RRT (LaValle and Kuffner, 1999) planning method
was examined. However, the RRT method has dis-
advantage in dynamic planning with time constraint.
Therefore, we have modified the RRT and presented
the Time-Based RRT method (Sintov and Shapiro,
2014b) which could plan a dynamic motion with a
time constraint and use it for rendevouze planning.
However, this method was not fully compatible for
our needs, and we started developing our own dy-
namic planning algorithm.
The Semi-Stochastic Kinodynamic Planning
(SKIP) algorithm was developed. It was originally
developed for the regrasping problem, but is given as
a generic planning algorithm for any fully actuated
dynamic system. A journal paper of the full algo-
rithm was recently submitted (Sintov and Shapiro,
∗
The work presented in this paper is Avishai Sintov’s
PhD research under the supervision of Dr. Amir Shapiro.
2014a). The SKIP algorithm is a computational
algorithm, partially stochastic, for finding a feasible
trajectory for a dynamic system to move from an
initial state to a goal state under the kinematic and
dynamic constraints of the problem. It is proven to
find a solution if such exists under a minimal known
probability.
The research is currently in an experimental
phase. A planar 3R robotic arm was built and posi-
tioned over an inclined hockey table. A set of mo-
tion capture cameras provides feedback of the ma-
nipulated objects state (position and orientation) at
all times. The servo motors also provide angle and
angular velocity feedback. These feedbacks with
the known Computed-Torque control scheme enables
motion of the arm to perform a desired regrasping mo-
tion according to the output of the SKIP algorithm.
Moreover, a model identification computation method
and an adaptive computed torque control was imple-
mented to estimate unknown system parameters. The
main objective of the experiments is to validate the
performance of our dynamic planning algorithm and
the regrasping method.
The next stages of the research is the extension
of the algorithm for performing mid-air flipping and
finally providing a general computation algorithm
givenanobject’s geometry and the desired final grasp.
That is, the algorithm will independently choose the
desired regrasping strategy given a particular object.
For example, for a long cylinder the in-hand spinning
motion is not practical and mid-air flipping should be
able to complete the motion.
2 OUTLINE OF OBJECTIVES
Dynamic regrasping is a new notion in robotics re-
search. The robot will initially spin the grasped ob-
ject into mid-air, then capture the object back at a new
grasp configuration. This challenge will require sev-
eral key components:
• A consideration of the robot’s full dynamics in or-
14
Sintov A. and Shapiro A..
A Computational Algorithm for Dynamic Regrasping Using Non-dexterous Robotic End-effectors.
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

der to impose a desired release trajectory of the
free flying object.
• A consideration of the fingers’ opening process
to ensure release the object with a desired initial
spin.
• A visual servo system that will measure the free-
flying object trajectory.
• Synthesis of a dynamic capturing trajectory for
the robot arm and its multi-finger hand.
• A consideration of the fingers’ closing process in
order to achieve object re-capturing.
The project will evaluate two qualitatively distinct
dynamic regrasping strategies. The first strategy is
termed in-hand spinning. The robot will release the
object into mid-air with an initial spin while opening
the fingers into a partial cage formation. The robot
arm will then move the caging fingers in tandem with
the flying object, but without disturbing the object.
When the spinning object will reach a new desired
orientation relative to the hand’s mechanism, the fin-
gers will capture the object by closing the cage around
the flying object. The second strategy is termed mid-
air flipping. Much like pancake or pizza flipping, the
robot arm will initially spin the object high above the
robot arm mechanism. This will give the visual servo-
ing system and the robot arm ample time to measure
the object’s precise trajectory under the influence of
gravity. Based on this information, the arm will sub-
sequently move with open fingers in order to capture
the flying object at a pre-designated rendezvous loca-
tion in space. The research will evaluate the relative
merits of in-hand spinning and mid-air flipping, with
the aim of identifying which type of objects are most
suitable for each strategy.
The research will additionally work out practi-
cal implementation procedures for the two regrasping
strategies. One promising procedure will start with
a selection of the robot arm release trajectory (posi-
tion and velocity), based on optimization criteria such
as total travel time, motors effort, trajectory smooth-
ness, and obstacle avoidance. The procedure will then
formulate a tracking control law based on classical in-
verse dynamics. The control law will subsequently be
modified to include corrective terms that compensate
for small modeling errors of the robot’s dynamics as
well as the small finger placement errors along the
object’s surface. A similar tracking control law will
be synthesized for the re-capturing trajectory. Finally,
the work will investigate how to robustify the regrasp-
ing procedure against small variations in the grasped
object parameters (for instance, its shape and mass
properties), in order to obtain a practically viable sys-
tem.
3 RESEARCH PROBLEM
3.1 Given System
Let Q ⊆ R
n
and U ⊆ R
n
be the configuration space
and the set of all possible torque inputs, respectively
of a fully-actuated n-R robotic arm. The robotic arm
is equipped with a simple non-dexterous jaw-gripper
end-effector. Link i of the robot is with length L
i
. We
locate the world reference frame O at the base of the
manipulator. The configuration space of the manipu-
lator Q ⊆ R
n
is defined to be the set of all configura-
tions of the joint angles. The dynamic motion equa-
tions of the manipulatorin the configuration space can
be written as
M(φ)
¨
φ +C(φ,
˙
φ)
˙
φ+ G(φ)+ Γ = u (1)
where φ(t) = (ϕ
1
(t) ·· · ϕ
n
(t))
T
∈ Q is the configura-
tion of the arm at time t, M is the n× n inertia matrix,
C the n× n matrix of centrifugal and coriolis acceler-
ation terms, G is the n × 1 vector of gravitational ef-
fects, Γ is the n × 1 vector of joints frictional torques
and u(t) ∈ U is a vector of control input torques to
the joints.
Let T ⊆ R
m
1
×S
m
2
be the task space of the manip-
ulators end-effector where m
1
= 2, m
2
= 1 in the pla-
nar case (d = 2) and m
1
= 3, m
2
= 3 in the spatial case
(d = 3). We denote p
ee
(t) ∈ T to be the task of the
end-effector at time t, that is, its position and orienta-
tion with respect to reference frame O. Moreover, we
define x
ee
(t) = (p
ee
(t)
T
˙
p
ee
(t)
T
)
T
∈ T × R
m
1
+m
2
as
the state of the end-effector in cartesian coordinates.
We set a reference frame X
ee
at the center of the end-
effector.
Given object B with mass m. We denote the
configuration of the object in the task space of the
end-effector at time t by p
obj
(t). And therefore, its
state is given by x
obj
(t) = (p
obj
(t)
T
˙
p
obj
(t)
T
)
T
∈ T ×
R
m
1
+m
2
. Further, we define the relative state between
the end-effector and object.
Definition 1. The relative state between the end-
effector and object is defined to be
x(t) =
{p
obj
(t)}
ee
˙
p
ee
(t) −
˙
p
obj
(t)
(2)
where
{p
obj
(t)}
ee
= R
obj
ee
(p
ee
(t)) · p
obj
(t) − d
obj
ee
(t) (3)
is the task of the object with respect to X
ee
, R
obj
ee
∈
SO(d) : T → T and d
obj
ee
(t) are the rotation map and
relative position, respectively, from reference frame
X
obj
to reference frame X
ee
.
AComputationalAlgorithmforDynamicRegraspingUsingNon-dexterousRoboticEnd-effectors
15

The relative state expresses the relative position and
velocity between the end-effector and object. At time
t = 0, the end-effector and object are located at p
0
and
at rest, that is, x
ee
(0) = x
obj
(0) = [p
T
0
0]
T
. Therefore,
their initial relative state is
x(0) = 0. At that time, the
object is grasped by the end-effector such that the ob-
jects reference frame X
obj
overlaps the end-effectors
reference frame X
ee
. That is, we define the initial ori-
entation and translation between corresponding refer-
ence frames to be zero (Figure 1a) with no relative
velocity as well.
3.2 Manipulation Goal
The regrasping problem is defined as follows. Given
the initial relative state
x(0) and a desired relative
state goal
x(t
g
) = ζ, compute the control input se-
quence u(t) ∈ U, t ∈ [0, t
g
] to form an optimal manip-
ulation of the robotic arm such that the relative goal
is reached at some finite time t
g
∈ [0, ∞). An opti-
mal manipulation is the one forming a feasible trajec-
tory of the arm φ(t) ∈ Q such that the relative state
goal is reached while minimizing a given cost func-
tion H(φ(t)).
Generally speaking, the robotic arm will perform
some kind of manipulation to grant the object an ini-
tial velocity at release time t
r
and catch it again at
some time t
g
with relative state ζ. The primary goal of
this manipulation is to perform a set of motions such
that at the final grasp the object will have a relative
state ζ = (ζ
T
p
ζ
T
˙
p
)
T
where ζ
p
∈ T and ζ
p
∈ R
m
1
+m
2
.
We can divide this goal to two fundamental con-
straints which must be achieved. The first constraint
is demanded by the essence of the regrasping prob-
lem, i.e., to achieve a new desired grasp configura-
tion. This constraint states that the end-effector must
finally grasp the object with the same relative posi-
tion and orientation as in t = 0 but with an additional
desired offset ζ
p
. A planar example for this is illus-
trated in Figure 1b. Here ζ
p
= (ζ
x
ζ
y
ζ
θ
)
T
where ζ
x
and ζ
y
are the translation components between coor-
dinate frames X
ee
, X
obj
and ζ
θ
is the relative orienta-
tion angle between the two. It should be noted that ζ
x
cannot be unequal to zero in a symmetric end-effector
but it is parameterized to preserve the generality of
the formulation. The second constraint is required for
proper manipulation. In order to obtain a soft inter-
ception and catch of the object at time t
g
, the end-
effector and the object must have equal velocities, that
is,
˙
p
ee
(t
g
) =
˙
p
obj
(t
g
). In other words, we constrain ζ
p
to be
ζ
p
=
0 . (4)
In general, the final goal of the regrasping manipula-
tion would be achieved if at some time t
g
∈ [0, ∞) the
following condition is met:
ρ(
x(t
g
) − ζ) ≈ 0 (5)
where ρ(·) is some metric criterion to be defined.
The condition will be met if the metric distance is
close enough to zero, that is, the distance is within
a tolerance boundary to be defined. Once condition
(5) is met (at time t
g
), the end-effector will regrasp
(jaws closure) the object at the desired relative state.
However,the end-effectorand the grasped object have
relative velocity with respect to coordinate frame O.
Therefore, after time t
g
where the object should be
firmly grasped by the end-effector, the manipulator
will gradually decelerate to zero velocity at final time
t
f
.
3.3 Constraints
The above desired manipulation should be done under
the following constraints:
1. Based on actuators limitations, the allowed subset
of control input torques is given by U
al
⊂ U.
2. The configuration of the arm is constrained to be
in Q
free
⊆ Q through the whole motion. Meaning,
the arms joints are limited within a certain range
due to mechanical and physical bounds.
3. Let V ⊂ R
n
denote the set of all possible veloci-
ties of the arms joints. The allowed joints veloci-
ties is defined by the abilities of the actuators and
is given by V
al
⊆ V .
4. At time of release t
r
, to enable the object to se-
curely leavethe end-effector,the orientation of the
end-effector must be parallel to its velocity vector.
That is,
hr
ee
,
˙
p
ee
i = 0 . (6)
where r
ee
∈ R
d
is the vector collinear to the last
link fixed with the end-effector.
4 STATE OF THE ART
This paper deals with the regrasping problem in a
dynamic manipulation approach. Let us first de-
scribe the two regrasping approaches taken by indus-
trial practitioners. The first approach is the pick and
place method which designates a special work area
near each robot arm, where the grasped workpiece
can be dropped in a controlled manner, then picked
up again at a new grasp configuration (Tournassoud
et al., 1987; Lozano-Pérez et al., 1987; Xue et al.,
2008). Alternatively, some high-end industrial practi-
tioners resort to ¸Sunthreading
ˇ
T the regrasping task by
IJCCI2014-DoctoralConsortium
16

ζ
y
ζ
θ
y
ee
x
ee
x
obj
y
obj
X
obj
X
ee
y
ee
, y
obj
x
ee
, x
obj
X
ee
, X
obj
(a) (b)
Figure 1: Initial and goal grasp configurations of the object by the end-effector: (a) both coordinate frames overlap in initial
grasp and (b) in the final grasp the relative position and orientation between the coordinate frames are defined by ζ
p
.
placing several (hugely expensive) robot arms along a
long production or assembly line, each picking a mov-
ing workpiece at a new grasp configuration (Kim and
Park, 1995; Levitin et al., 2006). While both regrasp-
ing methods work nicely in practice, they consume
valuable production time, occupy a substantial work
area, and are highly expensive when multiple robot
arms are being used.
In the robotics literature, there are three known
approaches for regrasping (without picking and plac-
ing); First, the use of the end-effectors degrees of
freedom to move between contact points while main-
taining a force-closure grasp during the entire pro-
cess (Corves et al., 2011; de Paula Caurin and Feli-
cio, 2006; Roa and Suarez, 2009; Sudsang and Phoka,
2003; Vinayavekhin et al., 2011; Stuheli et al., 2013).
This approach is also called quasi-static finger gaiting
in the robotics literature. However, quasi-static fin-
ger gaiting is quite wasteful, as it requires sufficiently
many degrees of freedom (requiring highly redun-
dant finger linkages) to manipulate the grasped object
between two grasp configurations while maintaining
force closure grasps. Most of the finger gaiting al-
gorithms use at least another extra finger that can be
lifted at each step (Grosch et al., 2008; Hasegawa
et al., 2003; Phoka and Sudsang, 2009; Rapela et al.,
2002). Such motion results in a slow quasi-static
manipulation, maintaining a state of constant contact
with the object. This has analogy to gait, where pro-
ceeding is done only with one leg lifted at a time
(when dynamic forces are not taken into considera-
tion) so that the other legs can maintain balance. Such
process can take valuable amount of time and there-
fore can be an impractical method. It has been re-
cently suggested that a dual arm robot may be more
suitable for object regrasping operations (Balaguer
and Carpin, 2012; Harada et al., 2012). While dual
arms is a promising approach, it has two significant
drawbacks. First, regrasping an object with two co-
operating arms require highly dexterous manipulation
capabilities from both arms. Second, a dual-arm sys-
tem is costly and occupies a fairly large work volume.
The second approach is sliding the fingertips on
the objects surface without losing contact to repo-
sition them at new contact points (Chen and Zribi,
2000; Cole et al., 1992). This approach has not been
widely researched and has low feasibility as it jeop-
ardizes the integrity of the object. Moreover, the ap-
proach needs also sufficiently enough degrees of free-
dom to develop trajectories on the objects surface.
The third approach is much faster and efficient,
however more complex, as it uses dynamical manipu-
lations to switch between grasp configurations. In dy-
namic manipulation, the robotŠs motion is quick and
there is no constant contact state. The end-effector
lose contact (fully or partly) with the object after re-
leasing it in the air and regains contact by catching
it at the final contact points. Such a method has
advantages in fast operation. However, most work
done in this field use a multi-fingered highly dexter-
ous hand for performing regrasping. Furukawa et al.
(Furukawa et al., 2006) proposed a regrasping strat-
egy based on visual feedback of the manipulated ob-
ject, this with a multi-fingered hand. The work of
Tahara (Tahara et al., 2012) introduced a regrasping
method using a 3-finger hand with no external sens-
ing for feedback.
There is related work to dynamic regrasping in the
field of dynamic manipulations (Senoo et al., 2008;
Srinivasa et al., 2005). Dynamic manipulation of
AComputationalAlgorithmforDynamicRegraspingUsingNon-dexterousRoboticEnd-effectors
17

an object enables the change of its position and ori-
entation by tossing, pushing or hitting it. Lynch et
al. (Lynch, 1997; Lynch et al., 1998) developed a
low degree of freedom robot to perform complex ma-
nipulations using rolling, sliding and free-flight, this
with no grasping (non-prehensile manipulation). In
(Tabata and Aiyama, 2001) a one degree of freedom
manipulator was used to toss an object to a goal po-
sition. The work by (Higashimori et al., 2009) was
done to mimic the manipulation done with a pizza
peel. The research states that the pizza peel is con-
trolled with only two degrees of freedom and uti-
lizes vision control. Much work has also been done
in pushing manipulations where the object is pushed
on a desired trajectory to re-position or re-orient it
(Lynch, 1992; Bernheisel and Lynch, 2006; Kopicki
et al., 2010). Moreover, some performed manipu-
lation of the grasped objects by dynamic manipula-
tions between fingertips (Garcia-Rodriguez and Diaz-
Rodriguez, 2011; Yashima and Yamaguchi, 2002).
Another research area regarding the regrasping is
rendezvous planning of two dynamic systems where
only one is controlled. That is, matching the states
of two dynamic systems within a finite time. Many
solutions to this problem were presented; The pro-
portional navigation algorithm is a commonly used
method to account for a moving object such as a UAV
or a missile (Erer and Merttopçuoglu, 2012; Mehran-
dezh et al., 2000). The advantage of the algorithm
is in its simplicity and is shown to be complete as it
will intercept the object in finite time. Many other
rendezvous algorithms for optimal trajectories were
presented to find the best trajectory in a dynamic en-
vironment (Michael et al., 2013; Rybus and Sew-
eryn, 2013). Another method for dynamic planning
is the Rapidly-exploring Random Tree (RRT) which
is a probabilistic method for trajectory planning in a
complex environment taking the dynamics of the sys-
tem into account (Kothari and Postlethwaite, 2013;
Kuwata et al., ; LaValle and Kuffner, 1999; Luders
et al., 2010; Shkolnik et al., 2009). The authors have
tried to use the RRT method for rendezvous planning
and further use it for dynamic regrasping (Sintov and
Shapiro, 2014b). However, this method has many dif-
ficulties working in real-time due to high complexity
and therefore not feasible for our objective.
5 METHODOLOGY
The approach method for solving the above problem
can be divided into three parts; First, we parameter-
ize the motion of the arm in its two phases, release
phase and free-flight phase. That is, the motion of the
arm is described as a vector σ. The next part is the
formulation of the problems constraints in terms of
time t and the parameter vector σ. The new formula-
tion of the constraints defines a time-varyingsubspace
in σ-space. A feasible motion of the arm under the
constraints is a solution vector σ
∗
which lies within
the time-varying subspace for the whole motion. The
problem of finding such a feasible solution is termed
as the Time-Varying Constraint (TVC) problem. In
the third part of the solution, a semi-stochastic algo-
rithm was developed to solve the TVC problem and
find a feasible and optimal solution. An optimal so-
lution is the one which minimizes a pre-defined cost
function H(σ). The followingsubsections give a short
overview of the solution parts.
5.1 Motion Parameterization
As mentioned, the regrasping motion is composed of
two main phases: the release phase and the free-flight
phase. In this section we parameterize this motion
to the parameters which are the DOF of the trajec-
tory. First we parameterize the motion in the free-
flight phase. Then, based on the initial task and ve-
locity (release state) at the beginning of the free-flight
phase, we parameterize the release phase as a polyno-
mial trajectory from the robots initial state to the re-
lease state. That is, we parameterize a polynomial tra-
jectory which could provide the initial velocity at the
release position demanded for the free-flight phase.
In this section we present the structure of σ
f
and
σ
r
. Then, we present the formulation of the problems
constraints in terms of time and σ.
5.1.1 Free-flight Phase
The free-flight motion of the object depends on its re-
lease position and release velocity. That is, granting
the object an initial velocity
˙
p
obj
(t
r
) from initial po-
sition and orientation (task) p
obj
(t
r
) defines its trajec-
tory with no control ability. Once the object is re-
leased, its free-flight trajectory is a projectile motion
solely under the influence of gravity. Therefore, the
definition of motion in this phase includes the initial
task and velocity at time t
r
.
Moreover, the estimated time for the end-effector
and the object to reach the desired relative state, e.g.,
satisfaction of condition (5), is defined by the gains
of the Computed-Torque controller to be used. There-
fore, the proportional gains of the controller defines
the time of interception t
g
with the object.
With the understanding of the parameters which
define the free-flight phase, we define the parameters
vector σ
f
. The form of the parameters vector σ
f
∈
IJCCI2014-DoctoralConsortium
18

R
d
1
in the free-flight phase is defined as follows:
σ
f
=
p
r
ee
˙
p
r
ee
k
p
1
··· k
p
n
T
. (7)
where p
r
ee
= p
obj
(t
r
) and
˙
p
r
ee
=
˙
p
obj
(t
r
) are the task
and velocity of the end-effector which would be
granted to the object at time t
r
, and d
1
= 2m
1
+ 2m
2
+
n. Vector σ
f
is a parameterization of the free-flight
phase and its determination defines the approximated
trajectory and motion time of the arm.
5.1.2 Release Phase
The parameterization of the release phase presented
here is the one introduced by (Sintov and Shapiro,
2014a). In this phase we must provide a trajectory
from the robots initial state at time t = 0 to the de-
sired release state at time t
r
presented in the previ-
ous subsection. That is, given the robots initial task
p
ee
(0) = p
0
ee
at rest, we need a trajectory s(t) that will
satisfy the following boundary conditions:
s(0) = p
0
ee
s(0) = 0
s(t
r
) = p
r
ee
s(t
r
) =
˙
p
r
ee
(8)
First we define an optional candidate trajectory which
could complete the task.
Definition 2. A trajectory function s(t) ∈ T is a can-
didate trajectory if it is differentiable and satisfies
some h boundary constraints.
That is, in our motion planning problem, a tra-
jectory s(t) is a candidate trajectory if it satisfies the
h = 4m boundary constraints in (8) which impose the
initial and release states. The following definition de-
scribes a candidate trajectory function which is con-
strained by the problems boundary constraints and has
redundant DOF to optimize.
Definition 3. A candidate trajectory function s(t) =
f
s
(t, w) ∈ T , where w = [w
1
··· w
m·k
]
T
∈ R
m·k
and
has h boundary constraints, is redundant if m· k > h.
The four constraints in (8) impose the values for
w
1
, ..., w
4
and leave k−4 free parameters for the func-
tion. Moreover, the goal time t
r
can also be chosen
as a free parameter if no time constraint is imposed.
Therefore, the redundant parameters are denoted as
σ
r
= [w
h+1
··· w
m·k
t
r
]
T
∈ R
d
2
, where d
2
= k − 4+1.
If the goal time t
r
is fixed, it should not be included in
the parameter vector σ
f
.
A redundant trajectory function s(t) = f
s
(t, σ
r
) is
chosen as the desired trajectory from the initial state
to the goal state. The function imposes the bound-
ary constraints while providing a desired number of
free parameters for motion planning and optimiza-
tion. Such redundant trajectories could take, for ex-
ample, polynomial form or be a fourier series. In this
work we implement the use of a redundant polyno-
mial function due its simplicity.
5.1.3 Overall Parameterization
The release phase parameters vector σ
r
and the free
flight parameters vector σ
f
can now be generalized to
one vector σ which is a parameterization of the whole
motion
σ =
σ
r
σ
f
∈ Ω (9)
where Ω ⊆ R
d
1
+d
2
. The determination of σ will fully
define the nominal trajectory of the motion from ini-
tial rest position of the arm (t = 0), through release of
the object (t = t
r
) to finally regrasping it at the desired
relative state (t = t
g
). The strength of this parameteri-
zation is that a single vector defines a specific regrasp-
ing motion independent of time.
5.2 Constraints Formulation
In this part we formulate the constraints of the sys-
tems motion in terms of the free parameters of the
problem. We formulate configuration space con-
straints which define Q
free
, other constraints in the
task space, and finally velocity and torque constraints
imposed by the limitations of the system. For exam-
ple, due to joint limitations, it is possible that not all
the configuration space Q of the arm is accessible.
Therefore, we can formulate the free space Q
free
ex-
plicitly as a set of z
1
constraints Φ ∈ R
z
1
Φ
i
(φ(t)) = Φ
i
(t, σ) ≤ 0, ∀i = 1, ..., z
1
. (10)
The same could be done to the velocity, torque and
workspace constraints. The set of inequalities ac-
quired could be written as
Ψ
i
(t, σ) ≤ 0, i = 1, ..., z (11)
where Ψ(t, σ) is a set of z functions which define the
systems constraints. Inequality (11) defines the fea-
sible region of the dynamic system in terms of time
and the desired trajectory parameters σ. That is, we
obtained a set of constraints which defines a time-
varying region in Ω. The next section presents the
time-varying constraint problem and the search algo-
rithm to find an optimal trajectory satisfying the con-
straints.
5.3 Time-varying Constraint (TVC)
Problem
In the previous section we obtained a set of inequali-
ties depending on t and the parameters vector σ. Re-
AComputationalAlgorithmforDynamicRegraspingUsingNon-dexterousRoboticEnd-effectors
19

Ψ(t
1
, σ) = 0
Ψ(t
a
, σ) = 0
Ψ(t
b
, σ) = 0
Ψ(t
2
, σ) = 0
σ
∗
Ω
f
Figure 2: The TVC problem where t
1
< t
a
< t
b
< t
2
.
call that the components in σ are independent of the
time. Therefore, we would like to find an optimal vec-
tor σ
∗
∈ Ω that satisfies the constraints through the
regrasping motion and minimizes some cost function.
Such an optimal vector will sufficiently define the mo-
tion of the system under the kinodynamic constraints.
Let Σ ⊂ Ω be the allowed region for σ. We define the
notion of a feasible set.
Definition 4. A set Ω
f
⊂ Ω is a feasible set in t ∈
[t
1
,t
2
] if Ω
f
⊆ Σ and each σ ∈ Ω
f
satisfies inequality
(11) for all time t ∈ [t
1
,t
2
].
We now define a feasible vector.
Definition 5. A vector of trajectory parameters σ ∈
R
d
is said to be feasible in t ∈ [t
1
,t
2
] if σ ∈ Ω
f
.
The above two definitions conclude that a vector is
feasible if
σ =
σ ∈ Ω
f
|σ ∈ Σ, Ψ
i
(t, σ) ≤ 0, ∀t ∈ [t
1
(σ),t
2
(σ)]
,
(12)
for all i = 1, ..., z. Notice that the time interval is writ-
ten in general [t
1
(σ),t
2
(σ)] and is a function of σ. This
is due to the definition of the free parameters vector σ,
which could include parameters that define the oper-
ation time. Therefore, the choice of σ determines the
boundary time. We now face the problem of finding
the feasibility set Ω
f
⊆ Σ where for all vectors within
it, inequality (11) is maintained at all times. Formally,
the problem is as follows.
Problem 1. Given the set of constraints in (11) and
the set Σ, find the feasibility set Ω
f
⊆ Σ.
Solving the above problem provides the feasible
set Ω
f
from which the optimal solution is to be cho-
sen. Hence, we define the following minimization
problem.
Problem 2. Find the vector σ
∗
∈ Ω
f
where Ω
f
⊆ Σ
such that
σ
∗
= argmin
σ
H(σ)
subject to σ
∗
∈ Ω
f
(13)
where H(σ) is some cost function to minimize.
t
σ
1
σ
2
Ψ(t
1
, σ) = 0
Ψ(t
2
, σ) = 0
(t
1
, σ
j
)
(t
2
, σ
j
)
(λt
1
+ (1 − λ)t
2
, σ
j
)
Figure 3: Vector σ satisfying Lemma 1.
In other words, the above general problem is find-
ing an optimal vector σ
∗
that is feasible and mini-
mizes some cost function H(σ) to be determined. Fig-
ure 2 illustrates the two problems. The position and
volume of Ψ(t, σ) in Ω varies in time and therefore,
the solution of the problem is in a domain formed by
projecting the constraints for time t
1
to t
2
on space Ω.
The intersection formed by these projections, if one
exists, is the feasibility domain that the optimal solu-
tion σ
∗
should be chosen from.
A search algorithm is now desired to find the set
Ω
f
of feasible vectors. The domain formed by the
set of constraints in inequality (11) is non-linear, non-
convex, and not continuous. Therefore, an analytical
solution of the reachable set is only possible in rare
and simple instances. We present a numerical search
algorithm to find a set of vectors satisfying the above
constraints. Further, we can choose one vector from
the set that best minimizes the cost function. We be-
gin by presenting a simple definition for normalizing
the time interval.
Lemma 1. A vector σ is feasible in t ∈ [t
1
,t
2
] if the
constraint Ψ
i
(λt
1
+(1− λ)t
2
, σ) ≤ 0 is satisfied for all
0 ≤ λ ≤ 1 and for all i = 1, ..., z.
Proof. For each time instant t ∈ [t
1
,t
2
] there exists λ
such that t = λt
1
+(1− λ)t
2
and 0 ≤ λ ≤ 1. Therefore,
if a vector σ satisfies Ψ
i
(t, σ) ≤ 0 for all i = 1, ..., z and
t
1
≤ t ≤ t
2
, it must also satisfy Ψ
i
(λt
1
+(1− λ)t
2
, σ) ≤
0 for all i = 1, ..., z and 0 ≤ λ ≤ 1.
Lemma 1 is utilized as a criterion for determining
whether a vector σ is feasible. Numerically, for σ we
check the constraint for time t = λt
1
+ (1 − λ)t
2
with
λ = {0, ∆λ
1
, ∆λ
1
+ ∆λ
2
, ..., 1}. The value of the step
∆λ
j
will be further defined. Figure 3 illustrates an
abstraction of the feasibility problem and the line in
time defined by Lemma 1. Without loss of generality,
from this point we will address the problem with the
time frame [t
1
,t
2
] = [0, t
g
].
The basis of the algorithm’s operation is selecting
a set of N random points within Σ and checking each
IJCCI2014-DoctoralConsortium
20
Algorithm 1: Feasibility_search(Σ, Ψ, P
max
, ε
b
).
Input: The allowed set Σ, set of constraints Ψ, the
probability P
max
, and tolerance ε
b
.
Output: Set of feasible points Ω
f
.
1: Calculate number of random points N such that the
probability to find a solution is more than 1− P
max
.
2: Generate the set P = {σ
1
, ...,σ
N
} of N uniformly
distributed random points within Σ.
3: for i = 1 → N do
4: if ¬(Adaptive_Check(σ
i
, Ψ, ε
b
)) then
5: Remove σ
i
from P .
6: end if
7: end for
8: return Ω
f
= P = {σ
1
, ...,σ
M
} // M ≤ N
for its feasibility. The feasibility search algorithm is
presented as the Feasibility_Search(Σ, Ψ) function in
Algorithm 1. The algorithm’s input is the allowed set
Σ in Ω chosen by the user and the set of constraints
of equation (11). The first step of the algorithm is to
determine the number of random points N such that
the probability to find a solution is more than a user
defined probability 1 − P
max
. The calculation of N
based on the choice of P
max
will be presented later
in the algorithm’s analysis. The next step is to sample
N random points P uniformly distributed in Σ. The
allowed region formed by Σ is a hyper-rectangle in
Ω and therefore we sample points in each axis of Ω
within the boundaries defined by Σ. Such sampling
provides a Poisson distribution over the volume of Σ.
The next step is going over all the N points in P and
filtering out those that are not feasible. The final time
t
g
i
is determined for each point σ
i
checked. We check
if the constraints are satisfied for time t = λt
g
i
where
λ = {0, ∆λ
1
, ∆λ
1
+ ∆λ
2
, ..., 1}. Those that do not sat-
isfy the constraints are eliminated and the filtered set
P with size M ≤ N is outputted.
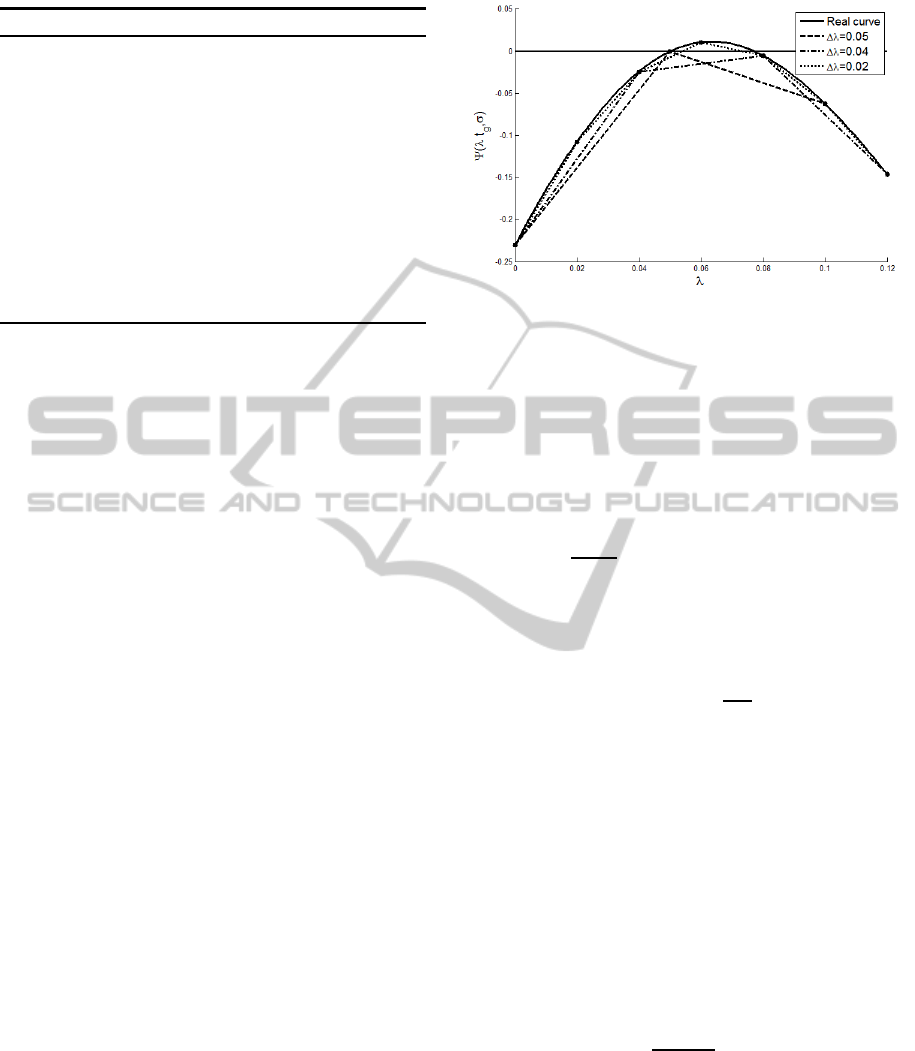
Scanning the constraint Ψ(λt
g
i
, σ
i
) for λ =
{0, ∆λ, 2∆λ, ..., 1} where ∆λ is a constant value is
rather risky. The value of Ψ might ascend over 0
and descend below again within the discretized step
size. An example of such is shown in Figure 4 where
with step size above 0.03 failure of the constraints
might not be discovered. Moreover, too small step
sizes could be unnecessary and the price would in-
clude very high complexity. Therefore, we present a
simple adaptive step size algorithm to fine tune the
time steps and diagnose or rule out such scenarios.
Definition 6. The constraint value of a feasible point
σ
i
at time λt
g
i
is defined to be
˜
Ψ
i,λ
= max
j
Ψ
j
(λt
g
i
, σ
i
)
, (14)
where Ψ
j
is the j
th
component of the constraint vector
Ψ.
Figure 4: The maximum constraint value along time with
change of the step size ∆λ.
That is, the constraint value is the shortest dis-
tance from point σ
i
to the boundary of the closest con-
straint. Notice that we refer to a distance with a posi-
tive value, but the value of
˜
Ψ
i,λ
is maintained negative
for an indication that σ
i
is a feasible point. Assume
that the change rate of the constraint value with regard
to λ is bounded by
∆
˜
Ψ
i,λ
∆λ
≤ S
max
, ∀ 0 ≤ λ ≤ 1 . (15)
That is, the maximum slope of the constraint value
˜
Ψ
i,λ
is S
max
. Under this assumption we can say that
if at time λt
g
i
the constraints are satisfied,
˜
Ψ
i,λ
< 0,
then the minimum time for the constraint to reach 0 is
(λ+∆λ
min
)t
g
i
where ∆λ
min
= −
˜
Ψ
i,λ
S
max
. Therefore, as we
get closer to a boundary of a constraint, we decrease
∆λ such that reaching above the zero line in that time
frame is not possible. Figure 5 illustrates the selec-
tion of ∆λ as it gets smaller when approaching the
zero line and larger when receding. However, in this
adaptive approach, even though
˜
Ψ
i,λ
passes the zero
line, the algorithm will never do so as it will continue
to decrease ∆λ. Therefore, we bound such that the
algorithm will stop checking the current σ
i
(and re-
move it) if
˜
Ψ
i,λ
< ε
b
< 0, where ε
b
is a value that will
be defined further in the algorithm’s analysis. This
also serves as a safety distance, assuring the solution
is far enough from the constraints boundary. To cal-
culate S
max
we differentiate the constraint vector by
λ to acquire its slope
∂Ψ(λt
g
,σ)
∂λ
, where t
g
is the max-
imum possible goal time based on the allowed time
interval given in Σ. S
max
is the maximum slope of all
components over all time and can be computed by the
following maximization problem
S
max
= max
λ,σ, j
S
j
(λt
g
, σ)
subject to 0 ≤ λ ≤ 1
σ ∈ Σ
(16)
AComputationalAlgorithmforDynamicRegraspingUsingNon-dexterousRoboticEnd-effectors
21

Figure 5: Adaptive step size algorithm.
Ω
Σ
Ω
f
Figure 6: Two-dimensional example of Σ and Ω
f
in Ω.
where S
j
is the j
th
component of the constraints
derivative S(λt
g
, σ) =
∂Ψ(λt
g
,σ)
∂λ
. This could be
computed analytically using Kuhn-Tucker conditions
or numerically. The adaptive step size function
Adaptive_Check(σ
i
, Ψ) is presented in Algorithm 2.
Algorithm 2: Adaptive_Check(σ
i
, Ψ, ε
b
).
Input: σ
i
, the set of constraints Ψ and the tolerance ε
b
.
Output: Boolean: 1 if σ
i
is feasible, 0 if not feasible.
1: Set λ = 0.
2: Extract t
g
i
from the last component of σ
i
.
3: Calculate S
max
. // using optimization prob. in (16).
4: while ( λ ≤ 1 ) do
5: Calculate
˜
Ψ
i,λ
= max
j
{Ψ
j
(λt
g
i
, σ
i
)}.
6: if ¬(
˜
Ψ
i,λ
< ε
b
) then
7: Return 0.
8: else
9: Calculate ∆λ = −
˜
Ψ
i,λ
S
max
.
10: λ = λ + ∆λ.
11: end if
12: end while
13: Return 1.
The final step of the algorithm is selecting the op-
timal solution among the set of feasible points Ω
f
=
{σ
1
, ..., σ
M
} found in Algorithm 1 and perform lo-
cal fine-tuning optimization. Given the cost function
H(σ), the optimal solution σ
∗
is found according to
Algorithm 3. In this algorithm, first a simple naive
search is performed on the feasibility set Ω
f
to find a
feasible point σ
k
that best minimizes H(σ) (Line 1).
Next, we utilize a Gradient Descent (GD) method (?)
to refine the solution and find a local minimum in the
neighborhood of σ
k
. The GD method is an iterative
algorithm with an update law of the form
σ
(i+1)
= σ
(i)
− γ∇H(σ
(i)
) (17)
for some small γ > 0 (Line 5). In each iteration a
check is done to avoid breaking the constraints. No-
tice that the Adaptive_Check function preventsthe so-
lution from approaching the constraint boundary with
distance less than ε
b
. The iterations are terminated
if the new point breaks the constraints or if the con-
vergence condition is satisfied (Line 10 of Algorithm
3). Figure 7 presents two examples of local refine-
ment of the optimal solution; one was stopped by the
constraint while the other managed to reach the lo-
cal minimum. The convergence condition checks if
the norm of the current descent is smaller than a pre-
defined tolerance ε
d
, that is, we have reached a local
minimum with ε
d
accuracy. The last point of the it-
eration is the optimal solution and is returned by the
algorithm.
Algorithm 3: Local_Optimization(Ω
f
, ε
d
).
Input: Feasible set Ω
f
= {σ
1
, ...,σ
M
} and tolerance
ε
d
.
Output: Optimal solution σ
∗
.
1: k = argmin
i
H(σ
i
), i = 1, ..., M
2: Define σ
(0)
= σ
k
.
3: i = 0.
4: repeat
5: σ
(i+1)
= σ
(i)
− γ∇H(σ
(i)
).
6: if ¬(Adaptive_Check(σ
(i+1)
)) then
7: Return σ
(i)
.
8: end if
9: i = i+ 1.
10: until
∇H(σ
(i)
)
2
< ε
d
11: σ
∗
= σ
(i)
.
12: Return σ
∗
.
Ω
f
σ
k
σ
∗
Ω
f
σ
k
σ
∗
Figure 7: Two examples of the optimal solution refinement;
one (left) descends to the local minimum and one (right) is
stopped by the constraint boundary.
IJCCI2014-DoctoralConsortium
22

Statistical analysis which was performed have
proven that it is possible to determine the minimal
probability to find a solution if such exists. a solution
if one exists.
6 EXPECTED OUTCOME
This work addresses the problem of reducing the
number of end-effectors needed in the production for
grasping a number of parts and performing several
tasks on them. Dynamic regrasping approach will
be addressed for transition between required grasps
to perform designated tasks. The idea for the re-
grasping operation is to perform it with a simple non-
dexterous end-effector and with the dynamics of the
robotic arm.
As presented, currently the algorithm has the capa-
bilities for computation of an in-hand spinning mo-
tion for regrasping. The next phase of the research
is extension of the planning algorithm to compute the
motion of the mid-air flipping. These two methods
should provide most of the dynamic regrasping needs.
The final outcome will be an overall algorithm for
computation of a regrasping motion given an object’s
geometry and the goal relative state. That is, the algo-
rithm will choose the best regrasping strategy accord-
ing to the objects geometry and desired final grasp.
Looking in a wider application for the regrasping
motion. The field of robotic grasping is very wide
and serve many civil, industrial and military areas.
The regrasping operation is performed whenever the
grasp configuration is not compatible to the future
task to be done. Many industrial and civilian ap-
plications demand change of the grasp configuration
to achieve desired tasks. In many applications we
demand fast and efficient performance of the tasks.
Moreover, we desire simple low cost arms to con-
duct the tasks. For example, in the industrial world
of today, fast and efficient production is highly im-
portant. However, achieving so must be accompanied
with low costs to ensure a reasonable final product
price. Our proposed research will impact the number
of robotic arms and end-effectors used in production
lines. Currently, each end-effector is specially de-
signed for grasping a specific object and performing a
specific task. They are used for assembly or material
handling. The more end-effector needed, the more
robotic arms, tool changers, and services are needed.
Moreover, they demand more operational space in the
plant. Using the same robotic arm and end-effector
for multiple tasks will drastically reduce the num-
ber of robotic arms needed and reduce the demand
for technical and engineering services. An additional
advantage would be in the production time. The dy-
namic regrasping algorithm would have great benefit
in shortening the material handling time of transfer-
ring objects between end-effectors because the object
remains in the same end-effector.
REFERENCES
Balaguer, B. and Carpin, S. (2012). Bimanual regrasping
from unimanual machine learning. In Proceedings of
the IEEE International Conference on Robotics and
Automation (ICRA), pages 3264 –3270.
Bernheisel, J. and Lynch, K. (2006). Stable transport of as-
semblies by pushing. IEEE Transactions on Robotics,
22(4):740 –750.
Chen, J. and Zribi, M. (2000). Control of multifingered
robot hands with rolling and sliding contacts. The In-
ternational Journal of Advanced Manufacturing Tech-
nology, 16:71–77.
Cole, A., Hsu, P., and Sastry, S. (1992). Dynamic control of
sliding by robot hands for regrasping. IEEE Transac-
tions on Robotics and Automation, 8(1):42 –52.
Corves, B., Mannheim, T., and Riedel, M. (2011). Re-
grasping: Improving capability for multi-arm-robot-
system by dynamic reconfiguration. In Jeschke,
S., Liu, H., and Schilberg, D., editors, Intelligent
Robotics and Applications, volume 7101 of Lecture
Notes in Computer Science, pages 132–141. Springer
Berlin Heidelberg.
de Paula Caurin, G. A. and Felicio, L. C. (2006). Learning
based regrasping applied to an antropomorphic robot
hand. ABCM Symposium series in mechatronics.
Erer, K. S. and Merttopçuoglu, O. (2012). Indirect Impact-
Angle-Control Against Stationary Targets Using Bi-
ased Pure Proportional Navigation. Journal of Guid-
ance Control Dynamics, 35:700–704.
Furukawa, N., Namiki, A., Taku, S., and Ishikawa, M.
(2006). Dynamic regrasping using a high-speed mul-
tifingered hand and a high-speed vision system. In
Proceedings of the IEEE International Conference on
Robotics and Automation (ICRA), pages 181 –187.
Garcia-Rodriguez, R. and Diaz-Rodriguez, G. (2011).
Grasping and dynamic manipulation by soft finger-
tips without object information. In Proceedings of
the 9th IEEE International Conference on Control and
Automation (ICCA), pages 766 –771.
Grosch, P., Suarez, R., Carloni, R., and Melchiorri, C.
(2008). Planning setpoints for contact force transi-
tions in regrasp tasks of 3d objects. In Proceedings
of the 17th IFAC World Congress, volume 17, pages
6776–6781, Seoul, Korea. IFAC International Federa-
tion of Automatic Control.
Harada, K., Foissotte, T., Tsuji, T., Nagata, K., Yamanobe,
N., Nakamura, A., and Kawai, Y. (2012). Pick and
place planning for dual-arm manipulators. In Pro-
ceedings of the IEEE International Conference on
Robotics and Automation (ICRA), pages 2281 –2286.
Hasegawa, Y., Higashiura, M., and Fukuda, T. (2003). Sim-
plified generation algorithm of regrasping motion -
AComputationalAlgorithmforDynamicRegraspingUsingNon-dexterousRoboticEnd-effectors
23

performance comparison online-searching approach
with ep-based approach. In Proceedings of the IEEE
International Conference on Robotics and Automation
(ICRA), volume 2, pages 1811 – 1816 vol.2.
Higashimori, M., Utsumi, K., Omoto, Y., and Kaneko, M.
(2009). Dynamic manipulation inspired by the han-
dling of a pizza peel. IEEE Transactions on Robotics,
25(4):829 –838.
Kim, H. and Park, S. (1995). A strong cutting plane al-
gorithm for the robotic assembly line balancing prob-
lem. International Journal of Production Research,
33(8):2311–2323.
Kopicki, M., Stolkin, R., Zurek, S., Morwald, T., and Wyatt,
J. (2010). Predicting workpiece motions under push-
ing manipulations using the principle of minimum en-
ergy. In Proceedings of the RSS workshop on Repre-
sentations for Object Grasping and Manipulation in
Single and Dual Arm Tasks. submitted.
Kothari, M. and Postlethwaite, I. (2013). A probabilisti-
cally robust path planning algorithm for uavs using
rapidly-exploring random trees. Journal of Intelligent
& Robotic Systems, 71(2):231–253.
Kuwata, Y., Teo, J., Member, S., Fiore, G., Member, S.,
Karaman, S., Member, S., Frazzoli, E., Member, S.,
How, J. P., and Member, S. Realtime motion planning
with applications to autonomous urban driving. IEEE
Transactions on Control Systems, page 2009.
LaValle, S. and Kuffner, J.J., J. (1999). Randomized kin-
odynamic planning. In Proceedings of the IEEE In-
ternational Conference on Robotics and Automation,
volume 1, pages 473–479.
Levitin, G., Rubinovitz, J., and Shnits, B. (2006). A genetic
algorithm for robotic assembly line balancing. Euro-
pean Journal of Operational Research, 168(3):811 –
825.
Lozano-Pérez, T., Jones, J. L., Mazer, E., O’Donnell, P. A.,
Grimson, W. E. L., Tournassoud, P., and Lanusse, A.
(1987). Handey: A robot system that recognizes,
plans, and manipulates. In IEEE International Confer-
ence on Robotics and Automation, pages 843=–849.
Luders, B., Karaman, S., Frazzoli, E., and How, J. (2010).
Bounds on tracking error using closed-loop rapidly-
exploring random trees. In American Control Confer-
ence (ACC), pages 5406–5412.
Lynch, K., Shiroma, N., Arai, H., and Tanie, K. (1998). The
roles of shape and motion in dynamic manipulation:
the butterfly example. In Proceedings of the IEEE In-
ternational Conference on Robotics and Automation,
volume 3, pages 1958 –1963 vol.3.
Lynch, K. M. (1992). The mechanics of fine manipulation
by pushing. In Proceedings of the IEEE International
Conference on Robotics and Automation, pages 2269–
2276.
Lynch, K. M. (1997). Dynamic manipulation with a one
joint robot. In Proceedings of the IEEE International
Conference on Robotics and Automation, pages 356–
366.
Mehrandezh, M., Sela, N., Fenton, R., and Benhabib, B.
(2000). Robotic interception of moving objects using
an augmented ideal proportional navigation guidance
technique. IEEE Transactions on Systems, Man and
Cybernetics, 30(3):238–250.
Michael, J., Chudej, K., Gerdts, M., and Pannek, J. (2013).
Optimal rendezvous path planning to an uncontrolled
tumbling target.
Phoka, T. and Sudsang, A. (2009). Contact point clustering
approach for 5-fingered regrasp planning. In Proceed-
ings of the IEEE/RSJ International Conference on In-
telligent Robots and Systems, pages 4174 –4179.
Rapela, D., Rembold, U., and Kuchen, B. (2002). Planning
of regrasping operations for a dextrous hand in assem-
bly tasks. Journal of Intelligent and Robotic Systems,
33:231–266.
Roa, M. A. and Suarez, R. (2009). Regrasp planning in the
grasp space using independent regions. In Proceed-
ings of the 2009 IEEE/RSJ international conference
on Intelligent robots and systems, IROS’09, pages
1823–1829, Piscataway, NJ, USA. IEEE Press.
Rybus, T. and Seweryn, K. (2013). Trajectory planning
and simulations of the manipulator mounted on a free-
floating satellite. In SÄ
ˇ
Esiadek, J., editor, Aerospace
Robotics, pages 61–73. Springer.
Senoo, T., Namiki, A., and Ishikawa, M. (2008). High-
speed throwing motion based on kinetic chain ap-
proach. In IROS, pages 3206–3211.
Shkolnik, E., Walter, M., and Tedrake, R. (2009).
Reachability-guided sampling for planning under dif-
ferential constraints. In in In Proceedings of the
IEEE/RAS International Conference on Robotics and
Automation (ICRA).
Sintov, A. and Shapiro, A. (2014b). Time-based RRT al-
gorithm for rendezvous planning of two dynamic sys-
tems. In Proceedings of the IEEE International Con-
ference on Robotics and Automation.
Sintov, A. and Shapiro, A. (Submitted July 2014a).
Skip: Semi-stochastic kinodynamic planning algo-
rithm. The IEEE Transactions on Robotics.
Srinivasa, S., Erdmann, M., and Mason, M. (2005). Using
projected dynamics to plan dynamic contact manipu-
lation. In Proceedings of the IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
3618 – 3623.
Stuheli, M., Caurin, G., Pedro, L., and Siegwart, R. (2013).
Squeezed screw trajectories for smooth regrasping
movements of robot fingers. Journal of the Brazil-
ian Society of Mechanical Sciences and Engineering,
35(2):83–92.
Sudsang, A. and Phoka, T. (2003). Regrasp planning for a 4-
fingered hand manipulating a polygon. In Proceedings
of the IEEE International Conference on Robotics and
Automation, volume 2, pages 2671 – 2676 vol.2.
Tabata, T. and Aiyama, Y. (2001). Tossing manipulation by
1 degree-of-freedom manipulator. In Proceedings of
the IEEE/RSJ International Conference on Intelligent
Robots and Systems, volume 1, pages 132 –137.
Tahara, K., Maruta, K., Kawamura, A., and Yamamoto, M.
(2012). Externally sensorless dynamic regrasping and
manipulation by a triple-fingered robotic hand with
torsional fingertip joints. In Proceedings of the IEEE
International Conference on Robotics and Automation
(ICRA), pages 3252 –3257.
Tournassoud, P., Lozano-Perez, T., and Mazer, E. (1987).
Regrasping. In Proceedings of the IEEE International
IJCCI2014-DoctoralConsortium
24

Conference on Robotics and Automation, volume 4,
pages 1924–1928.
Vinayavekhin, P., Kudohf, S., and Ikeuchi, K. (2011). To-
wards an automatic robot regrasping movement based
on human demonstration using tangle topology. In
Proceedings of the IEEE International Conference on
Robotics and Automation (ICRA), pages 3332 –3339.
Xue, Z., Zollner, J. M., and Dillmann, R. (2008). Planning
regrasp operations for a multifingered robotic hand. In
Proceedings of the IEEE Conference on Automation,
Science and Engineering, pages 778–783. IEEE.
Yashima, M. and Yamaguchi, H. (2002). Dynamic motion
planning whole arm grasp systems based on switch-
ing contact modes. In Proceedings of the IEEE In-
ternational Conference on Robotics and Automation,
volume 3, pages 2492 –2499.
AComputationalAlgorithmforDynamicRegraspingUsingNon-dexterousRoboticEnd-effectors
25
