
Model-Driven QoS-aware Approach for the Sensor Network
Assel Akzhalova
Department of Computer Engineering, Kazakh-British Technical University, Tole bi, Almaty, Kazakhstan
a.akzhalova@kbtu.kz
Keywords:
Model-Driven, QoS, Optimal, Policy.
Abstract:
The key idea of this article is to apply Model-Driven QoS-aware approach to the wireless sensor network
that are controlled by the network of ”smart” controllers. The sensors are connected via SPI interface to
the controllers installed at the oil wells in order to provide smooth data collection and transmission to meet
quality of service requirements. One of the new approaches to implement decentralized adaptation technique,
in particular, self-organizing transmission system. The self-organizing system control is entirely dependent on
the decision taken at the local level, i.e at the level of system components. However, it is hard to reach global
attainability of Quality of Service (QoS) requirements at run-time. In our work, we propose Model-Driven
Architecture, the meta-model and its semantics, as the basis for an adaptation framework. The adaptation is
realized as an automatic transformation through the policy generation.
1 INTRODUCTION
Service-oriented architecture (SOA) is currently one
of the most sophisticated technologies used in mod-
ern e-business. The SOA principles illustrate that an
integration of heterogeneous business resources such
as legacy systems, business partner applications, and
department-specific solutions are still emergent topics
and there is a need in developing less costly, reusable
and interoperable SOA solutions. In practice, there
are a lot of problems that make SOA solutions com-
plicated:
Large distributed systems often require huge ef-
forts to deal with legacy in case of incorporating new
services into the existing system in order to meet
new business requirements. This problem requires
research in service composition concerns including
developing service description specifications, service
discovery, optimal service selection, and binding pro-
tocols.
The services might be deployed on different plat-
forms that causes problems in data exchange and in-
creases investments in maintainability of the new sys-
tem. The solution of this issue suggests elaboration
of service functionality implementation providing au-
tonomy and loose-coupling.
Different owners oblige to deal with negotiations
and contracts between partners and, therefore, there
is a question on how to provide Service Level Agree-
ment (SLA) between participants.
All above are crucial for SOA systems to meet
QOS requirements such as security, reliability and
performance, especially at runtime.
The one of the ways of resolving the problem is
Enterprise Service Bus (ESB) which breaks up the
integration logic into easily manageable independent
entities. However, the ESBs presented in the market
are still have open disputes on the three main top-
ics which are essential requirements stipulated by e-
business:
• The SOA systems integration of heterogeneous
applications across disparate systems in a flexible
and less cost fashion (Martin Keen, 2004).
• Open standards as they are base for success-
ful interoperability across heterogeneous systems
(Martin Keen, 2004).
• The SOA systems automatic adaptation in order
to meet required constraints and agreements. sys-
tems.
An automatic adaptation of SOA can be consid-
ered as an automatic service selection. The automatic
service selection can be defined by policies that de-
scribe contracts between participants containing con-
ditions and actions including penalties in case if the
condition will not be met. For example, for the com-
plex service based systems service providers may de-
mand for various charging policies such as payment
per resource usage, payment on lifetime services,
and also specify available throughput and other con-
113
Akzhalova A.
Model-Driven QoS-aware Approach for the Sensor Network.
DOI: 10.5220/0005424901130122
In Proceedings of the Fourth International Symposium on Business Modeling and Software Design (BMSD 2014), pages 113-122
ISBN: 978-989-758-032-1
Copyright
c
2014 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
straints. These policies generate Service Level Agree-
ments (SLAs) legally binding contracts that sets con-
straints on different QoS metrics.
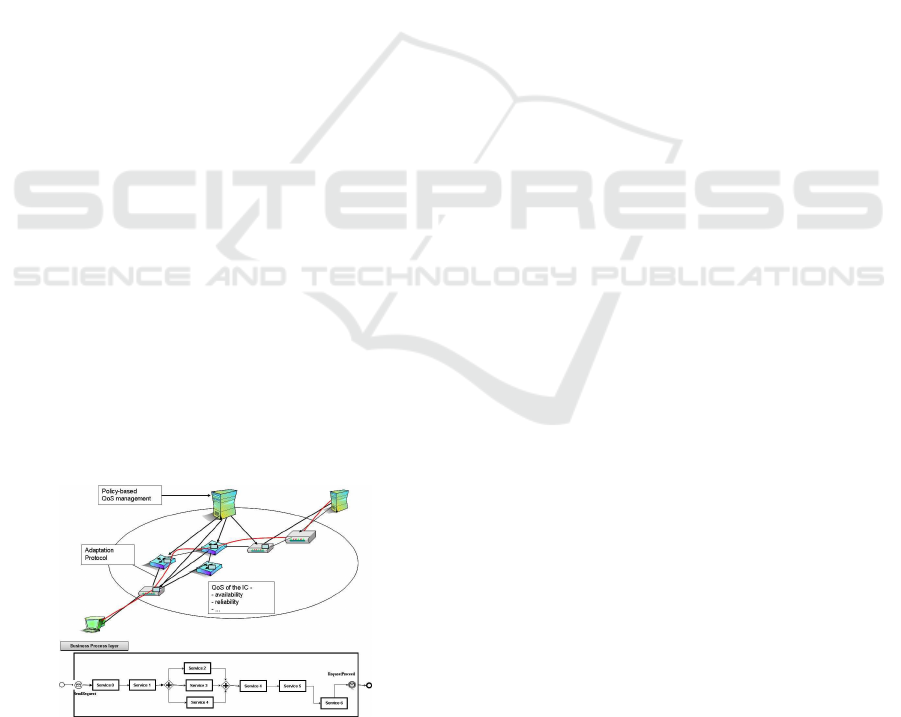
An example of business process that illustrates
service selection via policy mechanism is shown in
Figure 1. Figure 1 demonstrates run-time system of
the oil reservoir automation control framework.
The oil reservoir automation system consists of a
number of allocated set of sensors embedded to each
oil well equipment that measure various parameters.
Each oil well has one intelligent controller for collec-
tion and transmission of data measured by sensors. In
case of loss of communications with the server, it is
necessary to continuously transfer data using an alter-
native method or, in other words, to guarantee certain
level of reliability.
We introduce following assumptions for the node
in the sensor network and its attributes:
• Each node has the same logic, transmission and
storage of data.
• Each node has the same technical specifications
including processor that can perform data (Out)
and low level computations and, consequently, re-
ceived data packed and queued while waiting their
processing.
• Each node receives data from several sensors and
from neighboring nodes.
• Each node knows how many neighbors (sources)
surrounded it and it is able to locally measure the
number of packets received from neighbors. Each
source has a fair bit of buffer space in a queue.
That is each source has own ”channel” not avail-
able to other sources. Therefore, this infrastruc-
ture is typical example of queuing network.
• The ratio Tp / Ts (passive / sleep timers) deter-
mines the cost of energy and the system response
to the dynamic changes.
Figure 1: Business process modeling of QoS-aware service
system for oil reservoir automation control.
It can be observed especially in the automation of
oil and gas industry while monitoring oil fields via
controlled sensors and maintaining of high quality of
services (QoS) leads to improvement of the oil pro-
duction rate. In other words, the stipulations of unde-
layed data collection and transmission pre-determine
a choice of the best solutions of optimal production
and forecast accuracy.
The control framework can be considered as one
that finds optimal set of ICs in order to provide mini-
mum cost and maximum performance for a desirable
QoS parameters. An adaptation of the system may be
performed through local interactions and, therefore,
the overhead is limited by interaction with neighbor-
ing nodes. This architecture can be scaled up by al-
lowing the deployment of multiple service instances
running on different servers that are devoted for each
intelligent controller.
The choice of appropriate services or the process
of service selection is defined by policies that show
QoS characteristics for the service such as response
time, reliability, availability, and throughput. It is
essential to design and implement admission control
mechanism that will be able to conduct optimal ser-
vice selection in order to introduce service composi-
tion framework supporting QoS. In other words, this
framework should represent QoS-aware management
and adaptation infrastructure that provides essential
service requirements.
Therefore, we suggest that the relationship be-
tween possible service composition and QoS con-
straints will be incorporated into the design of a QoS-
aware sensor network architecture: the additional
complexity providing significant benefit at runtime
through automated policy generation. Section 2 intro-
duce MDE approach for QoS-aware system architec-
ture. Section 3 describes automatic policy generation
for the proposed architecture. Section 4 demonstrates
Case study. Section 5 compares different techniques
that base on policy-aware service composition. Sec-
tion 6 summarizes contribution and results.
2 MODEL-DRIVEN QoS-AWARE
SYSTEM ARCHITECTURE
It is quite often when control of quality of service at-
tributes at run-time is ambitious as there are abundant
calculations needed to prepare data for transmission.
Moreover, the accuracy of data processing affects the
future loads of the distributed system. The main
goal of this paper is to apply Model-Driven QoS-
aware architecture embedded into the network of con-
trollers which is capable to provide minimum delays
while transmitting and processing data and meeting
desirable quality of service requirements. QoS-aware
Fourth International Symposium on Business Modeling and Software Design
114
management should provide service performance and
availability monitoring as well as provision resources
based on predefined policies and agreements.
This work presents a model-driven framework for
automatic generation of reconfiguration policies. In
particular, we suggest that the relationship between
possible reconfigurations and QoS constraints should
be incorporated into the design of a SOA: the addi-
tional complexity providing significant benefit at run-
time through automated policy generation. Our focus
will be on meeting QoS constraints (performance and
reliability) for an overall architecture, what we con-
sider as Service Level Agreements (SLAs).
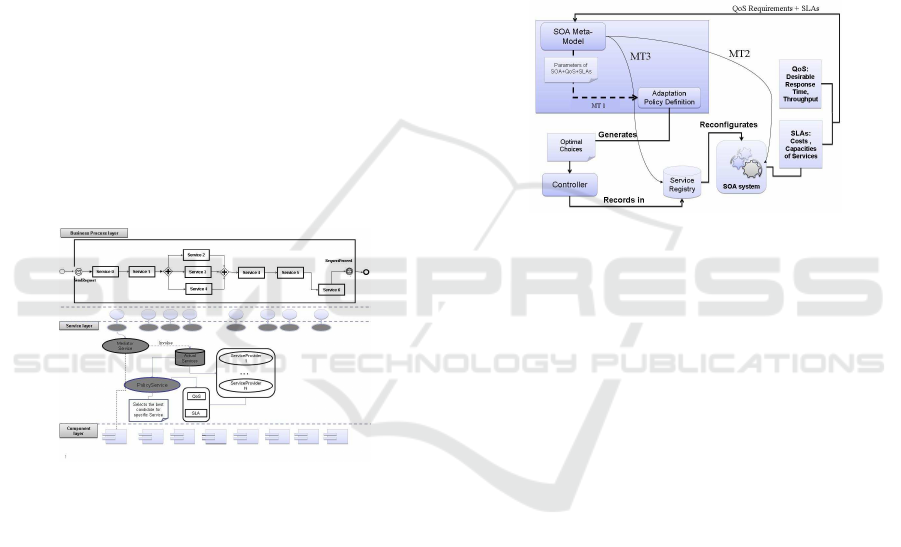
Figure 2 shows our framework in large. All re-
quests arriving to the system have to be served by all
abstract services in finite amount of time according
and after serving they leave the system. Every ab-
stract service communicate with a Mediator Service
that binds Actual Service from a repository. Actual
Services are updating from Service Providers side.
The repository is updated by Policy Service which
produces optimal selection basing QoS constraints
and given SLAs. In fact, Policy Service indicates to
each abstract service which Actual Service to pick up.
Figure 2: QoS aware service selection and policy generation
mechanisms.
In our work we employ a simple generic notion
of reconfiguration policy, by means of the metamodel
extension. The metamodel identifies the architectural
roles and relationships that are necessary to construct
a model of the monitored system. A distinguishing
feature of our metamodel is that it includes
• a QoS constraint language, based on the UML
QoS profile, and
• an architectural adaptation policy definition based
on dynamic programming approach from optimal
control theory that serves both as a specification
of how an architecture should evolve in the face
of QoS constraint violations for the adaptation en-
gine.
As it can be seen from Figure 2 the dynamic ser-
vice composition can be implemented by applying
policies which are based on QoS requirements and
SLAs. The service composition can be considered
as model transformation from design-time to run-time
abstraction levels.
A policy is modeled at design-time as a possi-
ble transformation that an architecture model can un-
dergo, representing possible reconfigurations of ser-
vice composition. Therefore, service selection allows
us to consider the reconfiguration of an architecture
as a transformation from one SOA model instance to
another.
The reconfiguration of an architecture realized
as three Model Transformations (MT): MT1, MT2,
MT3 (Figure 3).
Figure 3: Model transformations for the SOA infrastructure.
The model transformation MT1 is able to au-
tomatically frame the problem as a dynamic pro-
gramming optmization problem, over which our ded-
icated solver can determine reconfiguration strategies
(choices over variant points) as a function of environ-
mental changes. This resulting policy table is then
combined with a mapping from choices to actual ac-
tions on the implemented system, to provide a runtime
adaptation engine.
We employ model transformation MT2 again to
extract application metadata from the design time
metamodel, with the purpose of understanding how
the system is configured at runtime and, consequently,
what needs to be monitored:
• Deployment data for individual services (location,
interfaces, etc);
• The initial architectural configuration of services
(what usage connections exist between services);
• The set of queued interfaces;
• The basic properties that are necessary to com-
pute values of the QoS characteristics used in the
model.
A third model transformation M T3 is then used
over this monitoring information to change the in-
formation associated with individual services in the
repository model, for a roundtrip approach to re-
generating policies. Policy generation, as outlined in
Model-Driven QoS-aware Approach for the Sensor Network
115

the next section, is expensive and re-generation need
not be done frequentlyas service information does not
change often.
3 AUTOMATIC POLICY
GENERATION
3.1 QoS-aware Policy Generation
The metamodel is equipped with QoS characteristics
and computes the overall cost as a function of time of
architectural configurations that has to be minimized.
we exhibit two examples of cost definition. As an
example of the cost function of the system g can be
taken sum of the cost of holding requests in queue at
time step t which is formulated by the following ex-
pression:
g(t) =
n
∑
i=0
c
j
i
(t) · q
i
(t) (1)
where q
i
is a queue length of i-th node, c
j
i
is a cost
of establishing connection between nodes i and j at
time Another example is when the cost of the system
reflects a negotiation between cost of the system and
response time. In this case a sample of the cost func-
tion can have the following form:
f(g(t), RT) = g(t) +W ·max(0, RT
des
− RT) (2)
where RT
des
desirable response time, RT - response
time and W - a positive number 0 ≤ W ≤ 1 which is
a parameter that defines to which participant of the
tradeoff to give more weight. If W → ∞ then second
multiplier vanishes. Therefore, the system will have
to be balanced between desirable response time and
cost of the system.
We consider QoS constraints as a combination of
one or more requirements (predicates) P
1
, P
2
, P
3
, P
4
where P
i
is one from the set: Reliability, Availabil-
ity, Throughput, Response Time. We introduce Con-
straints() method as a rule for terms P
1
, P
2
, P
3
, P
4
:
Let
S : System.ActualCharacteristic.QoSCharactersitic,
C : QoSConstraint.DesirableCharacteristic,
∇
2
= {<, ≤, >,≥}
P
1
(S, ∇
2
,C) = S.SystemResponseTime → (3)
→ Calculate() ∇
2
C.SystemResponseTime.RT
P
2
(S, ∇
2
,C) = S.SystemReliability → (4)
→ Calculate() ∇
2
C.SystemReliability.REL
P
3
(S, ∇
2
,C) = S.SystemAvailability → (5)
→ Calculate() ∇
2
C.SystemAvailability.AVL
P
4
(S, ∇
2
,C) = S.SystemThroughput → (6)
→ Calculate() ∇
2
C.SystemThroughput.Thrpt
where Calculate() function computes response time,
reliability, availability and throughput.
Therefore, we can expose QoSCon-
straint.Constraints() as any combination L composing
of following pair of predicates defined in BNF form:
L = P
a
(S, ∇
2
,C)|L∇
1
L (7)
where ∇
1
∈ {∨, ∧}, and a ∈ {1, 2, 3, 4}.
Basing on QoS requirements, an adaption of the
system happens to adjust the system to the appropriate
performance objective. For instance, the system ad-
justment objective can be formulated as a rule: ”The
system has to have an availability of 99.9% during
the business hours of weekdays”. This rule can be
expressed according to (5):
AVL = 0.999
Another example of the rule to conform the system by
reliability and response time requirements may sound
as: ”The system must be reliable no less than 95%
and throughput of the system has to be no less 700
messages per second”.
(REL ≥ 0.95) ∧ (Thrpt > 700)
Therefore, our for given Constraints() we have to
find the best set of connected nodes for each node
while keeping minimum CostFunction() of the sys-
tem.
In (Akzhalova and Poernomo, 2010) we proposed
MDA for SOA architecture which uses automatic pol-
icy generation implemented as optimal service selec-
tion framework. We employ similar approach for the
sensor network QoS-aware framework.
After cost model has chosen and QoS require-
ments are determined the model transformation MT1
automatically changes the system to adjust the system
to desirable performance level. The system adapta-
tion happens by calling Reconfigure() selftransforma-
tion to make the system satisfy to desirable QoS char-
acteristics which are pre-defined in QoSConstraints.
Reconfigure() generates Policy which is used then for
a Binding appropriate Service to the node. In fact,
Reconfigure() produces Policy as a product of the fol-
lowing transformation:
Reconfigure:System× QoSConstraints → Policy
(8)
Fourth International Symposium on Business Modeling and Software Design
116

where reconfiguration of System is evaluated by its
cost model defined by CostFunction.
Every TimeStep when System violates QoSCon-
straints, Recongigure() defines Service.ID that has
to be bound for each node. We designate a can-
didate Service as {Policy(TimeStep) = ID, ID =
1, ..., NumberofServices}.
To find best candidate service at each time step:
BestPolicy(TimeStep) ∈ {Policy(TimeStep) =
ID,
ID = 1, ..., NumberofServices}
that satisfies to QoS constraints:
Constraints() ≡ true
and gives a minimum to an overall cost of the System:
System.CostFunction(Policy) → min, (9)
where System changes its reconfiguration according
to System.SystemConstraints():
SystemConstraints(TimeStep, Policy(TimeStep))
(10)
The problem of optimal adaptation at time t is
one of choosing the best server from the directory for
each i-th service. That is, it is one of finding the best
function set u
i
(t) that provides the lowest overall cost
while meeting desirable response time. Therefore, in
this case the formulation of optimal control problem
will be derived from :
To find an optimal control:
¯u
∗
(t) ∈ U
∗
(t) =
{u
i
(t) = j : j = 1, ..., m, RT( ¯x) < RT
des
}
that gives a minimum to functional:
J( ¯x, ¯u) → min, (11)
where the configuration of the system is defined by
system transformation:
¯x(t + 1) = F( ¯x(t), ¯u(t)),
¯x(t) ∈ D,
t = 0, ..., T − 1
(12)
The problem (sec5:eq11) - (trans1) is constrained
nonlinear optimal control problem. There is no exact
analytical decision of the formulated problem. In or-
der to solve the problem it is necessary to use some of
numerical optimization approaches. In the next sub-
section we give basics of iterative numerical methods
to solve the problem and convergency definition.
There is no still agreement on the best approach
of solving of the problem 12, however, tradition-
ally, among popular methods of solving such problem
are dynamic programming algorithm, genetic algo-
rithm, simulated annealing and others. We apply dy-
namic programming algorithm, an iterative approach,
to solve the formulated problem.
3.2 Best Candidates Selection
Algorithm
Dynamic programming is a general approach to
solve optimization problems that involve making a
sequence of interrelated decisions in an optimum
way. First, the problem is divided into subproblems
(stages) where each stage has a number of states. The
control (decision) at each stage updates the state into
the state for the next stage. The main idea of the ap-
proach is that at given current state the optimal deci-
sion for the remaining stages is independent of deci-
sions made in previous states.
In particular, the algorithm minimizes the sum of
the cost incurred at the current stage and the least total
cost that can be incurred from all subsequent stages,
consequent on this decision. This principle is known
as the Bellman’s principle of optimality (Bellman,
1957) and dynamic programming algorithm consists
of the following steps:
Dividing into Stages. The stages here related to time
(hence the name is dynamic programming) and
they are solving backward in time. In other words,
we consider T stages: k = T, T − 1, ..., 0.
Defining States at Stage. Each stage has a number
of states each of which indicates a candidate
server.
The value set of state variable x
k
at stage k is the
state set at stage k: x
k
= {x(k), ..., x(T)} which is
a solution of the problem:
x
k
(t + 1) = F(x
k
(t), u
k
(t)), t = k, ..., T − 1
x
k
∈ D
k
= { ¯x(t) ∈ D : t = k, ..., T}
(13)
and correspondent control at stage k is defined as
following:
u
k
= ¯u, u
k
∈ U
K
,
U
k
= { ¯u(t) ∈ U : t = k,...,T}.
(14)
Decision at Stage. The decision at a stage updates
the state at a stage into the state for the next stage.
Therefore, we calculate cost at current stage k:
g
k
(x
k
(t), ¯u(t)),
u
k
∈ U
K
, x
k
(t) ∈ D
k
t = k, ..., T
(15)
and we find the minimum of cost functional:
J
k
( ¯x
k
, ¯u
k
) =
T
∑
t= k
g( ¯x(t), ¯u(t)),
B
k
(x
k
, u) = min
u∈U
k
J
k
(x
k
, u),
x
k
∈ D
k
.
(16)
Model-Driven QoS-aware Approach for the Sensor Network
117
where k = T, T − 1, T − 2, ..., 0.. The function B
k
refers to Bellman’s function.
Recursive Value Relationship. According to the
fundamental dynamic programming principle of
optimality given the current state, the optimal
decision for the remaining stages is independent
of decisions made in previous states. In other
words, the optimum decision at stage k uses
the previous found optima. That is recursive
relationships means that a cost functional appears
in both sides of the following equation:
B
k
(x
k
, u) = min
u∈U
k
g
k
(x
k
, u) + B
k+1
(x
k
, u)
u ∈ U
k
, k = T, T − 1, ..., 0.
(17)
In the meantime, we find optimal control u
k
, k =
T, ..., 0.
Therefore, following this algorithm we find opti-
mal policies that minimizes cost function for a given
constraint.
4 EXPERIMENTS: DEPENDENCY
BETWEEN SERVICE
CAPACITY AND
PERFORMANCE
The presented automatic policy generation ap-
proach to select best candidates for the SOA
system. It was implemented as a middleware using
Java JDK1.6, XML and Eclipse Modeling Tools
(Eclipse Classic 3.5.2) on Intel(R)Core(TM)2Quad
CPU/2.66Ghz/2.66Ghz/RAM3.23GB. A general
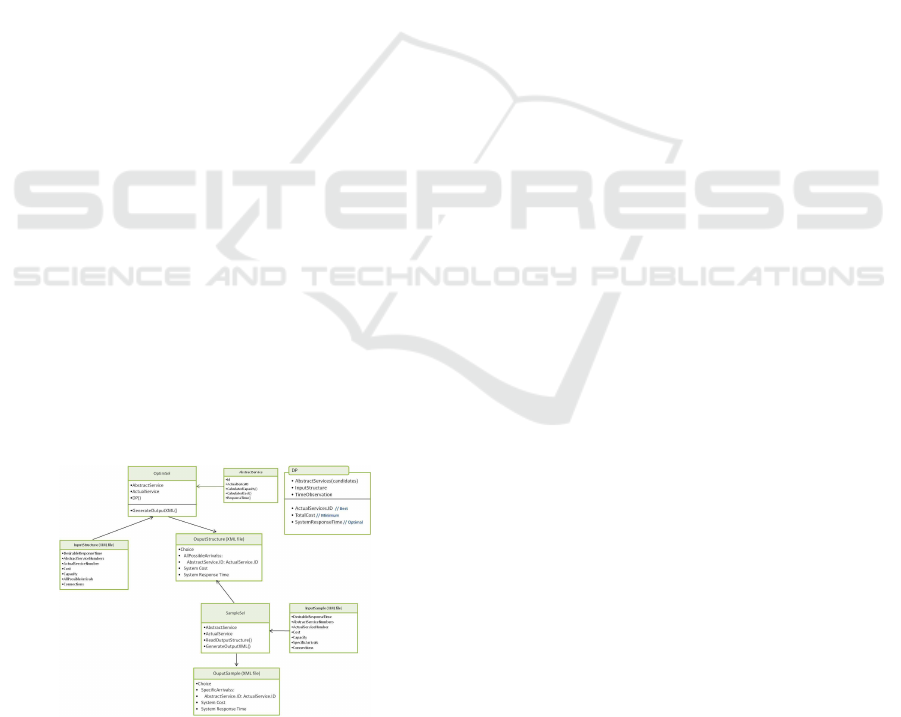
scheme of the project can be represented in the
following class diagram (Figure 4).
Figure 4: Class diagram of the optimal service selection
implementation.
OptimSel class is responsible for generation of op-
timal choices for given input parameters of SOA sys-
tem. Input parameters of SOA system are collected
by InputStructure Class which is XML file containing
QoS requirements such as Desirable Response Time,
data about Actual Services number and their Capaci-
ties and Costs, Connections between services and all
possible Arrivals. Those inputs are used then for a
series of experiments in order to test different case
studies that will be presented in the next sections. Op-
timSel reads (parses) InputStructure file and produce
OutputStructure XML file by means of DP (dynamic
programming) Method.
DP is the Method that performs dynamic progar-
mming algorithm using Observation Time as a num-
ber of states that was described in previous Chapter.
DP returns Best Actual Service for each Abstract Ser-
vice that bring to the system minimum Total Cost and
Response Time of the system that is not violating De-
sirable Response Time.
After calling and executing DP OptimSel pro-
duces OutputStructure by calling GenerateOutput-
Structure() method. GenerateOutputStructure() cre-
ates XML file by parsing results to specific attributes.
In fact, OutputStructure file contains optimal choices
for each Service per each Arrival in order to proceed
efficiently arriving to the system requests.
The diagram in Figure 4 contains SampleSel, a de-
rived class from OptimSel, that is used for each case
study. For instance, if we simulate the SOA system
for different distribution of arrivals we use policies
generated and stored in OutputStructure XML and
generate table specifically for those arrivals. The table
for those arrivals is OutputSampleXML file.
In order to test the system for varying values of
Desirable Response time, Capacities, Costs or Con-
nections it has to be generated relative OutputStruc-
ture XML files for each case.
The purpose of this experiment is to find out how
capacities of the service affect to the cost and perfor-
mance of the system.
The system is composed of n = 8 semantic ser-
vices and each service has m = 6 independent ser-
vices. Assume that the service at each Semantic ser-
vice has cost defined by Cost c
j
i
and Capacity ˜µ
j
i
(i =
1, .., 8; j = 1, .., 6). The values of Cost and Capacities
are shown in Table 1 and Table 2, respectively.
In order to conduct the test we build new tables of
capacities which range over average absolute devia-
tion MD from previous capacities. An average abso-
lute deviation is also often called Mean absolute De-
viation (MD) is the mean of the absolute deviations of
a set of data about the data’s mean. The MD of the set
data size n is defined by:
Fourth International Symposium on Business Modeling and Software Design
118
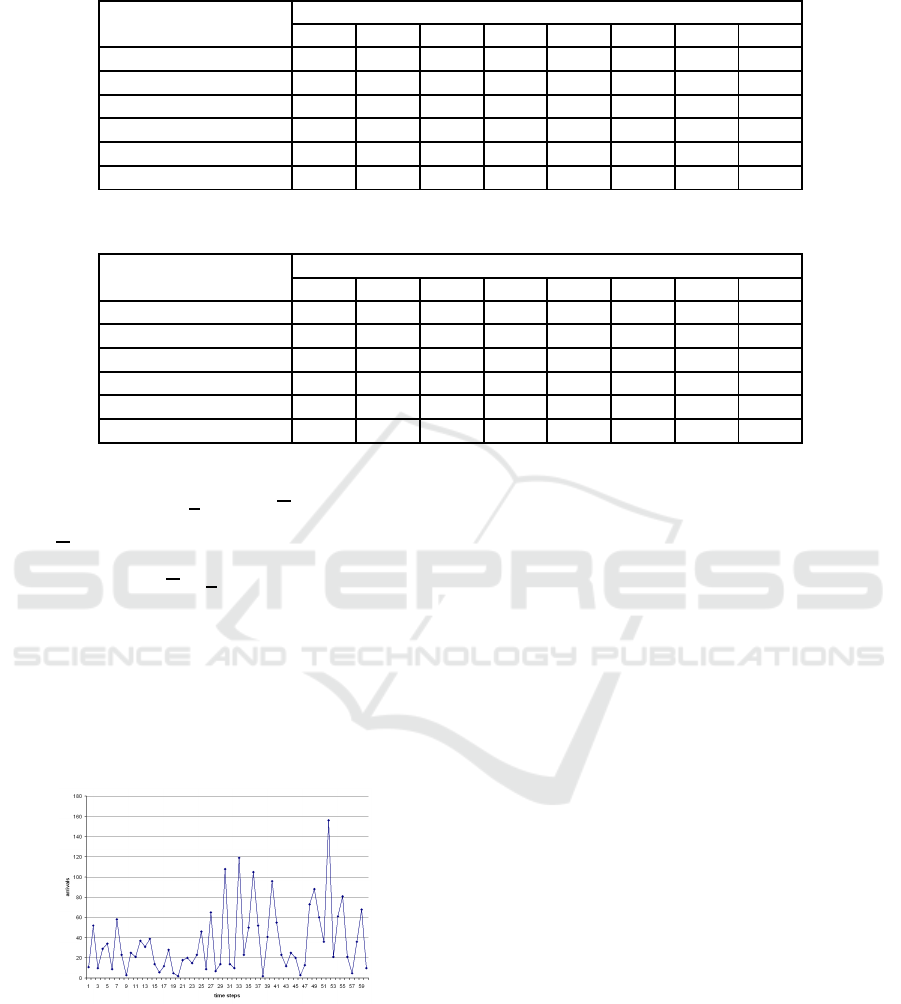
Table 1: Maximum capacity of Services at each Semantic Service (requests per second).
ID of the Service
ID of the Semantic Service
1 2 3 4 5 6 7 8
1 50 55 55 57 65 57 65 67
2 51 60 65 58 67 60 67 68
3 56 67 71 64 70 63 72 70
4 60 70 72 68 72 65 74 71
5 80 85 90 70 80 68 75 75
6 85 90 120 100 120 100 85 84
Table 2: The cost of the Service for each Semantic Service (unit of money per request).
ID of the Service
ID of the Semantic Service
1 2 3 4 5 6 7 8
1 10 11 15 10 15 16 12 14
2 20 21 23 20 23 25 18 15
3 30 31 35 28 35 30 23 20
4 40 42 45 35 42 40 35 30
5 50 52 55 43 44 41 40 40
6 52 55 60 45 55 45 51 50
MD =
1
n
n
∑
i=1
{α
i
−
α}
where
α - the mean of the distribution:
α =
1
n
n
∑
i=1
α
i
Basing on investigation of relationship between
MD variation and performance of the system we may
take this dependency as the next step to study cost
functional of the system that can adjust model valida-
tion. We consider a system that process Poisson dis-
tributed requests (Figure 5) that has to adapt itself to
meet RT < RT
des
constraint where RT
des
=4 seconds.
Figure 5: Arrivals to the system.
In fact, handling different capacities of the service,
we obtain three systems with services that have dif-
ferent Capacities and Costs. In other words, one can
represent those variations as different offers from a
number of service providers. Therefore, we exam-
ine how different offers may affect to the overall re-
sponsiveness and expenses of exploiting systems. In
particular, capacities of systems where MD = −11,
MD = +11 are defined in Table 3 - Table 4. We leave
the cost of the services fixed (see Table 2).
According to given data we apply dynamic pro-
gramming algorithm that finds optimal policies for
each system. Analyzing how capacities will affect to
response time of the system and total cost on Figure
6 and Figure7 we may discover that in general evolu-
tion of the systems with different capacities have sim-
ilar dynamics but different amplitude. For instance,
response time obtained by dynamic programming al-
gorithm with higher capacities +MD has the smallest
values in comparison with one that was produced by
applying services with lower capacities.
Instead the policy that had to select among ser-
vices with capacities −MD from original transforms
the system to the state when one has slowest respon-
siveness. In other words, the new configuration has
violated desirable response time. Presumably, exist-
ing resources were not sufficient to tackle with 156 re-
quests at time step 52. At the same time, this outcome
shows that in order to apply dynamic programming
there is needs to put a constraint on capacities distri-
bution in advance to avoid non-optimal solutions.
Surprisingly, the maximum response time re-
turned by the policy with originally capacities is very
close to the value of response time of the system with
capacities +MD. For instance, in case of highest
workload at time step 52 when 156 requests had to
be proceed. In other words, having same cost of the
service and capacities that differ on 11% from MD,
we observe that dynamic programming produces re-
Model-Driven QoS-aware Approach for the Sensor Network
119
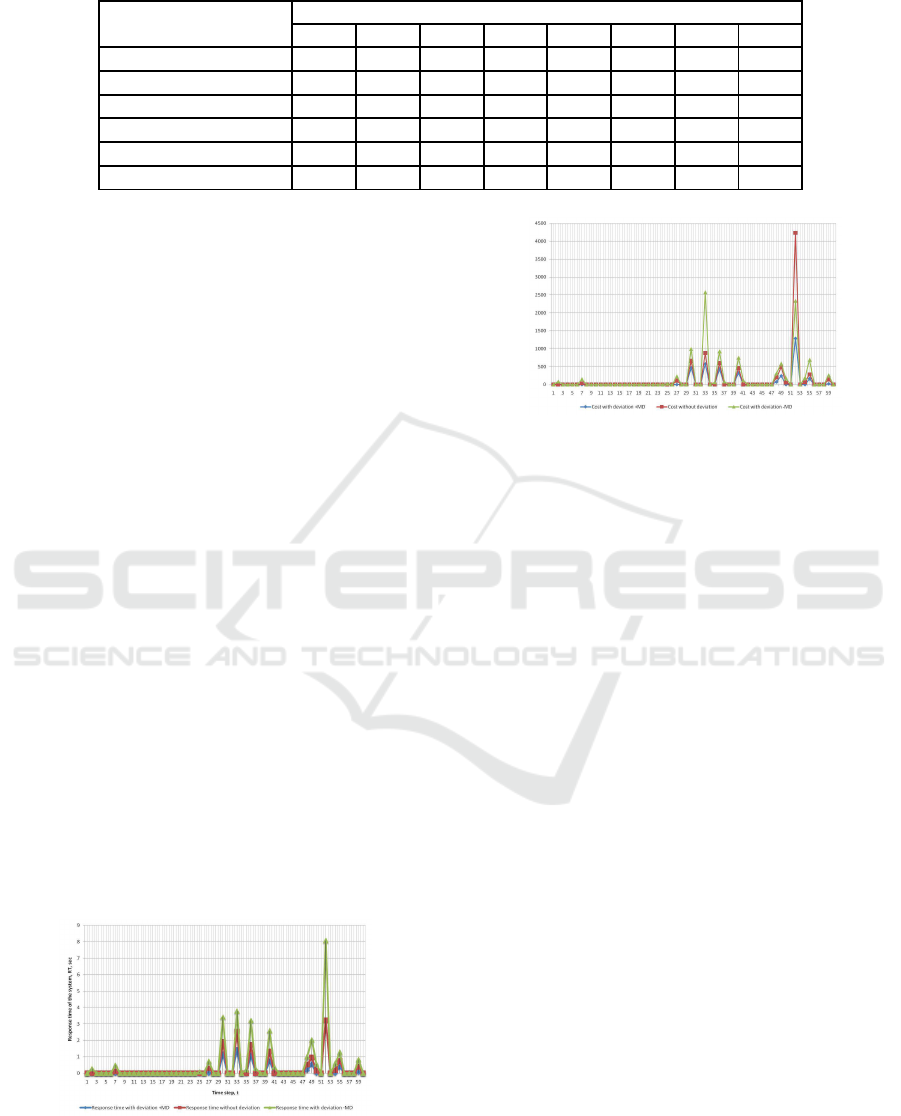
Table 3: Maximum capacity +MD of Services at each Semantic Service (requests per second).
ID of the Service
ID of the Semantic Service
1 2 3 4 5 6 7 8
1 61 66 66 68 76 68 76 78
2 62 71 76 69 78 71 78 79
3 67 78 82 75 81 74 83 81
4 71 81 83 79 83 76 85 82
5 91 96 101 81 91 79 86 86
6 96 101 131 111 131 111 96 95
sponse time as close as possible to the desirable one.
Therefore, the constraint formulated as inequality for
dynamic programming is the objective to reach as
near as possible. However, the picture of costs of
cases with original and capacities +MD is dissimilar.
In particular, as it can be observed in Figure7 the
cost of the system in case of exploiting services with
higher capacities, was the lowest one. In contrast to
the similarity of response times of the system with
original capacities and capacities +MD, the cost of
the system with original capacities at time step 52 is
the highest one. In the meantime, when system han-
dles services with lowest capacities −MD the cost of
the system was expensive as it had to afford a range
of workloads by using less efficient resources.
Table 5 displays maximum achieved response
time for different systems and their total cost. As it
can be studied from the Table and examining all ac-
commodated systems we have detected that the best
variant in terms of minimum cost and response time
was generated by policy that operates with services
with highest capacities.
As it was mentioned at the beginning of this test,
Table 2 remains having constant values of service cost
for all considered systems. We may make preliminary
assumption that total cost of the system decreases
while handling services when the value of their ca-
pacities increases. Therefore, there is an inverse re-
lationship between performance of existing resources
(services) and cost and response time of the system.
Figure 6: Dynamics of response time for different sets of
capacities.
Summarizing the case study, we have investigated
Figure 7: Dynamics of cost of the system for different sets
of capacities.
an influence of changing capacities to the system
characteristics:
• The experiments showed a considerable impact of
changing capacities to the cost of the system. and
response time at given constraints.
• If the deviation MD is bigger than 20% then the
response time of the system differs significantly
than one produced handling original service ca-
pacities.
• Employing dynamic programming to the systems
with capacities that have MD + 11%, the algo-
rithm gives maximum response time that is very
close to one obtained by applying original capac-
ities. In fact, in both cases it attempts to approach
to the desirable response time.
• On other hand, if value of capacities less than
enough then constraint might be violated.
These outcomes can deliver essential recommen-
dations when system’s resources struggle with work-
loads and their utilization changes from current level.
At the same time, these results can used by service
providers to install required service contract with ser-
vice consumers.
5 DISCUSSION
LymberopoulosLeonidas, Emil Lupu and Morris Slo-
man in (Lymberopoulos et al., 2003) propose a frame-
work that supports automated policy deployment and
Fourth International Symposium on Business Modeling and Software Design
120
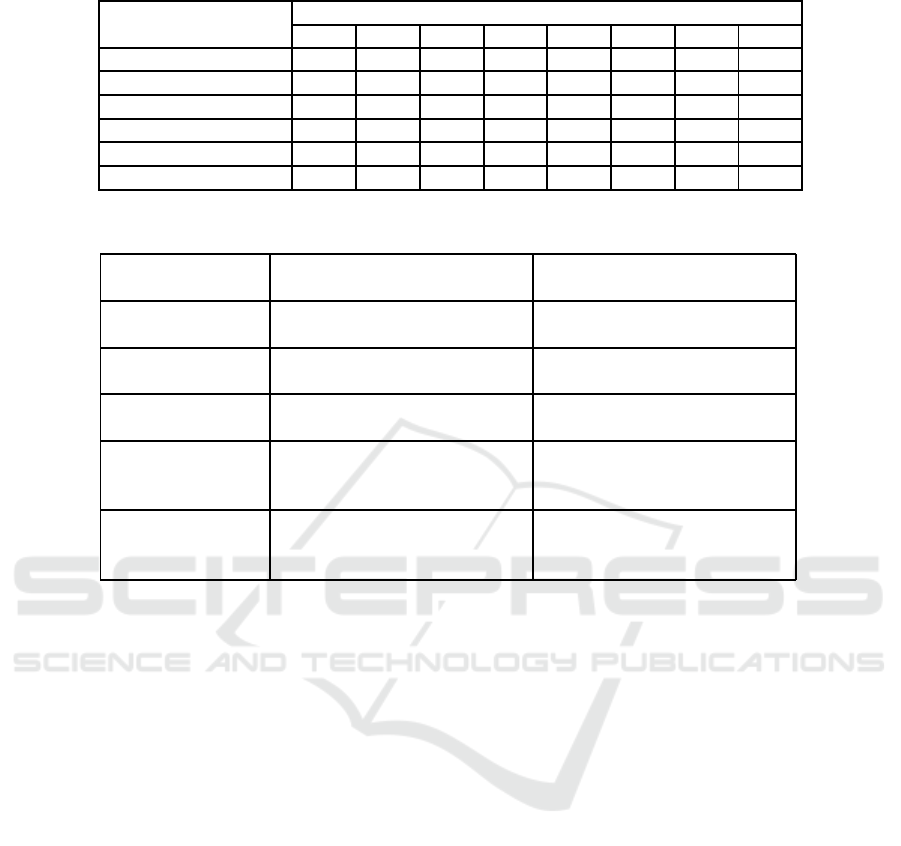
Table 4: Maximum capacity −MD of Services at each Semantic Service (requests per second).
ID of the Service
ID of the Semantic Service
1 2 3 4 5 6 7 8
1 39 44 44 46 54 46 54 56
2 40 49 54 47 56 49 56 57
3 45 56 60 53 59 52 61 59
4 49 59 61 57 61 54 63 60
5 69 74 79 59 69 57 64 64
6 74 79 109 89 109 89 74 73
Table 5: The maximum response time and cost of the system for different types of policies.
Type of system Maximum response time,
Max(RT)
Total cost of the system
Services with
capacities −MD
8.069 10591
Services with
original capacities
3.232 8209
Services with
capacities +MD
3.225 3616
Services with
capacities
+2∗ MD
2.1099 2494
Services with
capacities
+3∗ MD
1.4314 1607
flexible event triggers to permit dynamic policy con-
figuration. Basically, the authors developed PON-
DER policy language for adaptation at the service
layer to select and modify policies at the network
layer (Damianou et al., 2001). The language provides
reuse by supporting definition of policy types, which
can be instantiated for each specific environment. The
proposed adaptation is run-time and it also allows to
build a new adaptation strategies that can be incor-
porated into the management system by adding new
policies which react to different events using the ex-
isting policy actions or by replacing existing policies
with new versions, which either implement new ac-
tions on the managed objects or new actions on the
Policy Management Agents. In general, an adaptation
is provided in one of the following ways:
• by dynamically changing the parameters of a QoS
policy to specify new attribute values for the run-
time configuration of managed objects;
• by selecting and enabling/disabling a policy from
a set of pre-defined QoS policies at run-time.
The advantage of the presented approach is that
parameters of the selected network QoS policy are
calculated and set at run-time. The authors addressed
the future research on developing techniques that pro-
vide policy specification and adaptation across differ-
ent abstraction layers; and to develop tools and ser-
vices for the engineering of policy-driven systems.
The research of QoS policy based
Web Service selection conducted by
(Wang et al., 2006) attempts to generalize QoS
contract specification, establishment, and mon-
itoring for Service Level Management into one
large framework. The authors introduce a QoS
management architecture consisting of component
services, their interactions, and interfaces with
external services such as real-time host and network
condition monitoring (through COTS Monitoring
tools like Empirix OneSight/FarSignt) (Wang et al.,
2005). The framework includes a tool for end users
to generate, modify and validate QoS specifications
in the given language. The tool facilitates generation
of the QoS specifications without requiring the user
to remember the supported set of QoS characteristics
and their value domains. The Monitoring Service
registers condition predicates with the Diagnostic
Service, which returns with notifications after that
Monitoring Service updates the corresponding data
in Maintenance Service, which in turn activates some
Adaptation Mechanisms defined in the policy.
Therefore, the framework provides reusable con-
cepts and processes to facilitate QoS contract estab-
lishment and monitoring through contract negotia-
Model-Driven QoS-aware Approach for the Sensor Network
121

tion, resource management, diagnostics and adapta-
tion mechanisms. However, as the authors note in
(Wang et al., 2006), it has to be done the further
research and development of dynamic QoS-driven
resource management algorithms for Service Level
Management.
This work presents a way to tackle with above
problems by introducing model-driven approach to
SOA together with the optimal control technique as
transformation for the SOA meta-model in order to
automatically reconfigure the system in less costly
way.
6 CONCLUSIONS
The policy generation was formulated as an optimal
control problem which allows automatically gener-
ate appropriate configuration of the service-oriented
system to meet QoS constraints. It means that pro-
posed approach is generic in terms of choosing dif-
ferent level of QoS requirements and applying differ-
ent techniques to solve the optimal control problem.
The model is extensible as the QoS requirements may
be included during system design. We have offered
dynamic programming approach as the solution of
the formulated problems. The case study investigates
how different parameters of the service-oriented sys-
tem and constraints affect to the performance and dy-
namics of system utilization. We have evaluated ob-
tained results and formulated recommendations and
best strategies for employing dynamic programming
approach to dynamically adapt SOA according to de-
sirable QoS characteristics.
REFERENCES
Akzhalova, A. and Poernomo, I. (2010). Model driven ap-
proach for dynamic service composition based on qos
constraints. Services, IEEE Congress on, 0:590–597.
Bellman, R. (1957). Dynamic Programming. Princeton
University Press.
Damianou, N., Dulay, N., Lupu, E., and Sloman, M. (2001).
The ponder policy specification language. In Sloman,
M., Lobo, J., and Lupu, E., editors, POLICY, volume
1995 of Lecture Notes in Computer Science, pages
18–38. Springer.
Lymberopoulos, L., Lupu, E., and Sloman, M. (2003). An
adaptive policy-based framework for network services
management. J. Netw. Syst. Manage., 11(3):277–303.
Martin Keen, Amit Acharya, e. a. (2004). Patterns: Im-
plementing an SOA Using an Enterprise Service Bus.
IBM Corp., Riverton, NJ, USA.
Wang, C., Wang, G., Wang, H., Chen, A., and Santiago,
R. (2006). Quality of service (qos) contract spec-
ification, establishment, and monitoring for service
level management. In EDOCW ’06: Proceedings of
the 10th IEEE on International Enterprise Distributed
Object Computing Conference Workshops, page 49.
IEEE Computer Society.
Wang, G., Wang, C., Chen, A., Wang, H., Fung, C.,
Uczekaj, S., Chen, Y.-L., Guthmiller, W. G., and Lee,
J. (2005). Service level management using qos mon-
itoring, diagnostics, and adaptation for networked en-
terprise systems. In EDOC ’05: Proceedings of the
Ninth IEEE International EDOC Enterprise Comput-
ing Conference, pages 239–250. IEEE Computer So-
ciety.
Fourth International Symposium on Business Modeling and Software Design
122
