
The Green Mobility Grid of the SmartCity
Víctor Fernández
1
, Raúl Urbano
1
, Andreas Varesi
2
and Zsolt Kremer
2
1
CIT Development & Consulting,Ciudad Gran Túria, 46014 Valencia, Spain
2
Technomar GmbH, Marktforschung & Unternehmensberatung
Widenmayerstraße 46a, D - 80538 München, Germany
{vfernandez, rurbano}@citdev.com
{a.varesi, z.kremer}@technomar.de
Abstract. This paper aims to present an innovative grid service for SmartCity
addressed to the mobility because of goals and solutions from FP7-
SMARTV2G and FP7-MOBINCITY. The communications between charge
stations-FEV-operators, the forecast of energy grid, the expected demand of
loads and how to integrate this future mobility models into the SmartCity are
mainly aspects covered in this paper.
1 Introduction
In most OECD countries the transportation and electric power systems contribute to
the majority of CO2 emissions [1] and most of the fossil fuels (coal, natural gas and
oil) which are used for transportation and to produce electricity have to be imported.
By shifting currently non-electric loads to the grid, electric vehicles might play a
crucial role in the integration of these critical elements of the whole energy system:
power generation and transportation. But currently, the number of fully electric
vehicles (FEV) is quite low. Also the public charging infrastructure for electric
vehicles (EV) is very limited or non-existent in most cities, though a few cities have
already installed significant infrastructure as part of pilot projects and other programs.
So today, smart charging infrastructure for EVs seems to be a nice to have solution
for the far future. But in fact problems with non-smart charging infrastructure may
occur faster than expected. In order to improve the situation of electromobility, some
governments are putting into practice politician strategies that promote the FEVs use.
So Tesla became in 2013 the best-selling car in Norway even ahead of VW Golf. Also
other EV manufacturers are facing a surprisingly high demand. E.g. BMW expects to
sell 26.000 of its model i3 in 2014. For this growing stock of EV public charging
infrastructure in shopping centers, working areas, public parking, etc. will be needed.
But only installing enough public charging stations is not the solution. In this case,
having at a major event like a football game with only 100 FEVs (less than 1% of all
parked vehicles) will cause big grid problems. Public charging of an average FEV has
an electric power consumption of about 10 kW, so 100 FEVs would cause a peek
power demand of 1 MW at the same time and same grid segment. This is twice as
much as the energy consumption of the floodlight of a big football stadium. Grid
overload up to a breakdown might be the result. But also insufficient communication
between EV and charging infrastructure is a problem of today. Nothing is as annoying
Varesi A., Kremer Z., Urbano R. and Fernà ˛andez V.
The Green Mobility Grid of the SmartCity.
DOI: 10.5220/0006182800030010
In European Project Space on Information and Communication Systems (EPS Barcelona 2014), pages 3-10
ISBN: 978-989-758-034-5
Copyright
c
2014 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
3

as waiting hours for recharging an FEV only to find that the battery is still empty
because the charging process has been cancelled at the very beginning. Also many
present FEV drivers have no real access to most of the public charging stations
because of missing roaming between different charging station operators (CSO),
energy suppliers and countries. On the other hand there are also still unresolved issues
of electromobility like short driving range, long recharging duration and the question
how to find a suitable and free charging station. So there is an actual need not only for
a smart charging infrastructure but also for a smart mobility enhancement solution for
EVs. The EU funded FP7 projects Smart Vehicle to Grid Interface (SMARTV2G) and
Smart Mobility in Smart City (MOBINCITY) are two matching solutions in order to
meet these challenges.
2 SMARTV2G
The Smart Vehicle to Grid Interface project (SMARTV2G), funded by the European
Commission within the FP7 Program, was designed to solve future deployment of
charge stations in SmartCity regarding expected EV demand.
In that sense, the main objective targeted by the SMARTV2G Project aims at
connecting the electric vehicle to the grid by enabling controlled flow of energy and
power through safe, secure, energy efficient and convenient transfer of electricity and
data. A Control Centre (the main intelligence of the smart charging infrastructure lies
in the higher control level) provides commands and load schedules to the charging
stations and EVs. Therefore, they only play the executive role in the whole network
and energy management process by adapting the charging load according to the
instructions given by the Control Center. The SMARTV2G Control Centre has to
intelligently manage the energy demands received from the different charging stations
through the day, based on the reservations made. It is able to communicate with all
involved parties in order to supervise electrical levels and power quality, and to buy
the energy needed for charging
SMARTV2G comprises features like EV load forecasting, estimation of vehicle to
grid availability and an optimal management of charging stations according to
Demand Side Management (DSM) based on charging user preferences. Furthermore,
the system offers several services to the EV users like charging station booking, EV
autonomy prediction, charging station finder and route planning.
SMARTV2G offers AC Smart Charging Stations as well as Fast DC Charging
Stations. Both types of charging stations are based on the new IEC 15118-
communication standard defining the communication between EV and charging
station that helps to provide all the described new operational modes and services.
The project Consortium is comprised of a well-balanced group of seven partners
(Electrical Technology Institute, Fraunhofer ESK, Etrel Svetovanje in Druge
Storitve, CIT Development & Consulting, Sapienza University of Rome, Technomar
and Elektro Ljubljana Podjete Za Distribucijo Elektricne Energije) from four
European countries (Spain, Germany, Italy and Slovenia) with complementary skills
and expertise, including all the necessary profiles to deal with the scheduled project
work plan.
4
EPS Barcelona 2014 2014 - European Project Space on Information and Communication Systems
4

Furthermore, key industrial companies in the field of electro-mobility have shown
their interest and commitment to the project.
3 MOBINCITY
The MOBINCITY project, founded by European Commission within the FP7
Program, aims the optimization of FEV autonomy range and the increase in energy
efficiency thanks to the development of a complete ICT-based integrated system able
to interact between driver, vehicle and transport and energy infrastructures. This
innovative solution will take advantage of the information provided from these
sources in order to optimize both energy charging and discharging processes (trip
planning and routing).
In that sense, there have been identified four main objectives. (1) Develop a
system to be installed within the vehicle able to receive information from the
surrounding environment, which can have influence in the vehicle performance
(traffic information, weather and road conditions and energy grid). (2) Optimization
of the trip planning and routing of FEV using information from these external sources
including alternatives from other transport modes adapted to user’s needs. (3)
Definition of an efficient and optimum charging strategy (including routing) adapted
to user and FEV needs and grid conditions. Moreover, MOBINCITY will (4)
implement additional energy saving methods (as driving modes and In-Car Energy
Management Services) within the FEV interaction with the driver.
The project Consortium is comprised of 13 partners (Energy Technology Institute,
Fraunhofer Institute for Communication Systems, Electronic Trafic, Energy Institute
Hrvoje Požar, Enel Distribuzione, CIT Development & Consulting, Elektro Ljubljana
Podjete Za Distribucijo Elektricne Energije, Hrvastki Telekom, Technomar, Oprema
Ravne, Etrel Svetovanje in Druge Storitve, Consortium for Research in Automation
and Telecommunication and Zabala Innovation Consulting) from 5 different countries
(Spain, Germany, Slovenia, Italy and Croatia), covering relevant sectors as traffic
management, energy, ICT and telecommunications and automotive industry.
4 Interlinking Between SMARTV2G and MOBINCITY
Interaction with energy infrastructure, which refers to the integration of Fully Electric
Vehicles in electricity grids. Main solutions are related with the correct management
and monitoring of electricity consumption by means of smart meters and smart grids
deployment. Smart Grids are characterized by a more efficient distribution and
generation systems allowing individual energy consumers adapt their needs
depending on the situation of the grid and generation in each moment.
The Demand Side Management (DSM) achieved by SMARTV2G provides
algorithms of charging infrastructure control allowing better exploitation of FEV
charging capabilities by the power network operators.
5
The Green Mobility Grid of the SmartCity
5
On the other hand, the communication between control center and Electric Vehicle
Supply Equipment (EVSE) is another feature, which SMARTV2G and MOBINCITY
share together.
The mainly current energy standards apply in both projects are (1) based on the
new ISO standard of Vehicle to grid communication interface [2] defining the
communication between FEV and charging station that helps to provide all the
described new operational modes/services, and (2) on the grid side, the safety
function for power management defined by the IEC 61851 standard - Electric vehicle
conductive charging system [3], which harmonizes plugs and charging modes for
EVs.
The mainly current communication standards apply in both projects are the ITS-
G5 and GeoNetworking standards (which both issued by ETSI to specify the wireless
communication among Intelligent Transport Systems (ITS)) [4] the Intelligent
Transport Systems (ITS); Infrastructure to Vehicle Communication; Electric Vehicle
Charging Spot Notification Specification [5] and the Communication system for the
planning and reservation of EV energy supply using wireless networks [6] in order to
enhancement the Vehicle to infrastructure communication (V2I).
5 Architecture of SMARTV2G Project
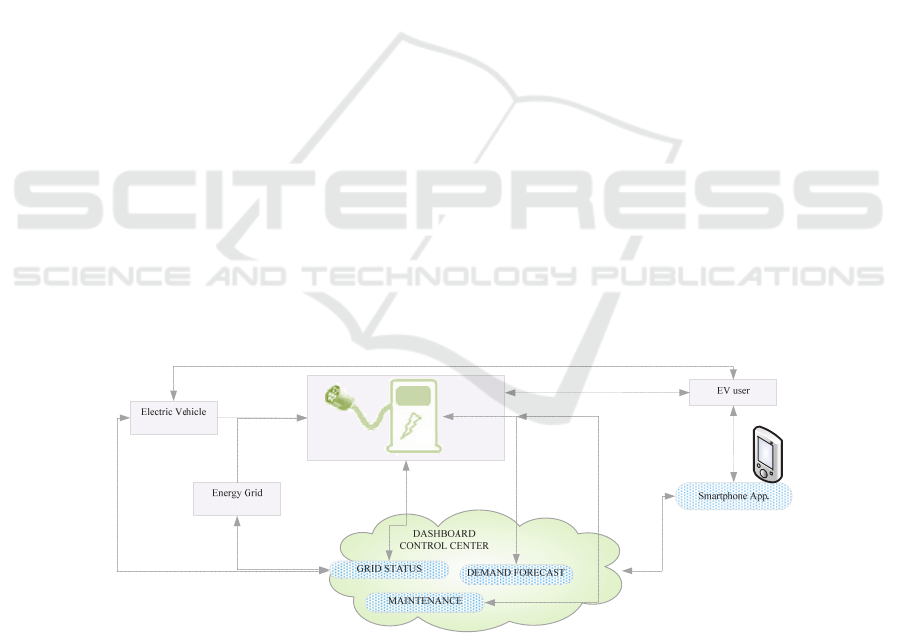
The architecture of SMARTV2G is based on a cloud solution, which enables the
interaction between EVs, charge station grid and users. Several interfaces have been
achieved in order to allow the data flowing between these actors. The DashBoard-
control center implemented enables operators (such as energy suppliers and business
operator) real time and forecast behavior of the electro mobility grid. Moreover,
several proactive functionalities are allowed due to the communications protocols
established between Smart Charge Stations and this central server. A native APP for
Smartphones allows EV users and owners to order a load-charge of his EV (as mainly
functionality), real time level of battery, estimated autonomy of EV and availability of
sockets to load it.
Fig. 1. The SMARTV2G architecture based on a cloud control center. This shows all actors
involved in the project.
6
EPS Barcelona 2014 2014 - European Project Space on Information and Communication Systems
6
6 Architecture of MOBINCITY Project
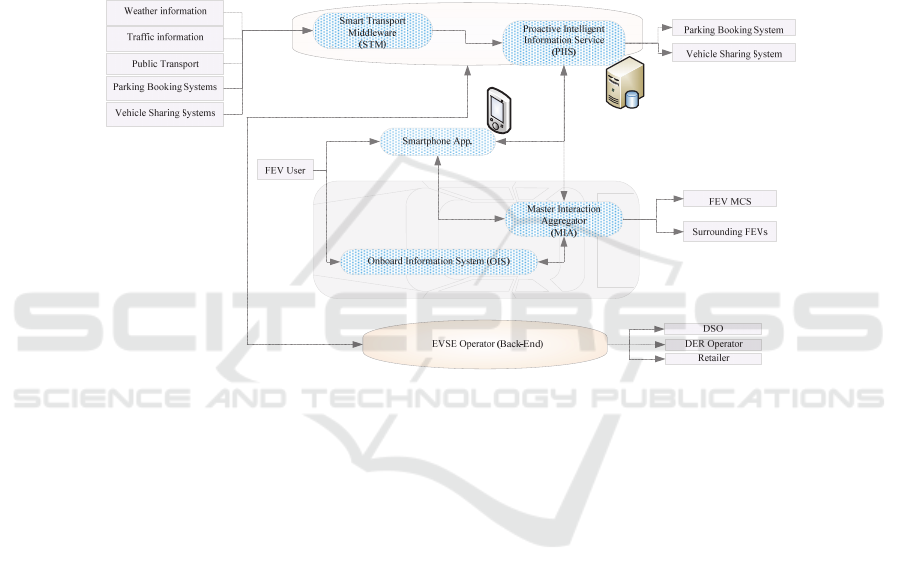
Mobility actors, acting as information providers, are involved in the overall
architecture of MOBINCITY. The Smart Transport Middleware (STM) is a software
based on a standard approach which allows correct optimization from related
information gathered. The Proactive Intelligent Information Service (PIIS) is a
software designed to request for available and the most suitable mobility options on
route. Additionally, it is considered the re-routing functionality. Onboard solutions,
including integration with EV(s) are also involved in MOBINCITY architecture.
Moreover, grid agents are integrated based on a bidirectional communication model
with our mobility information acquisition and mining.
Fig. 2. The complex architecture of the MOBINCITY project aims to involve all mobility
actors. This scheme shows several subsystems shall be implemented in along the project
duration.
7 Actual State of SMARTV2G Project
According with the work plan, there have been successfully achieved all individual
goals distributed along duration of SMARTV2G project. At beginning of this last
year, there has been implemented a laboratory test in order to integrate each
subsystems through three use cases.
As a result of this integration test, there has been successfully tested capacity to
manage load profile and power during load process (at charge stations), control
strategy, EV load forecasting tool, vehicle to grid availability tool and FEV
monitoring (at Control Center), usability of charging stations finder, load booking
and autonomy estimation tools (at System Interface APP).
The SmartV2G final field test is mainly sited in Ljubljana through integration with
Charging Station Web Portal of Elektro Ljubljana enabling current users a set of
homologous
features with the System Interface solution. V2G Control Centre has
7
The Green Mobility Grid of the SmartCity
7
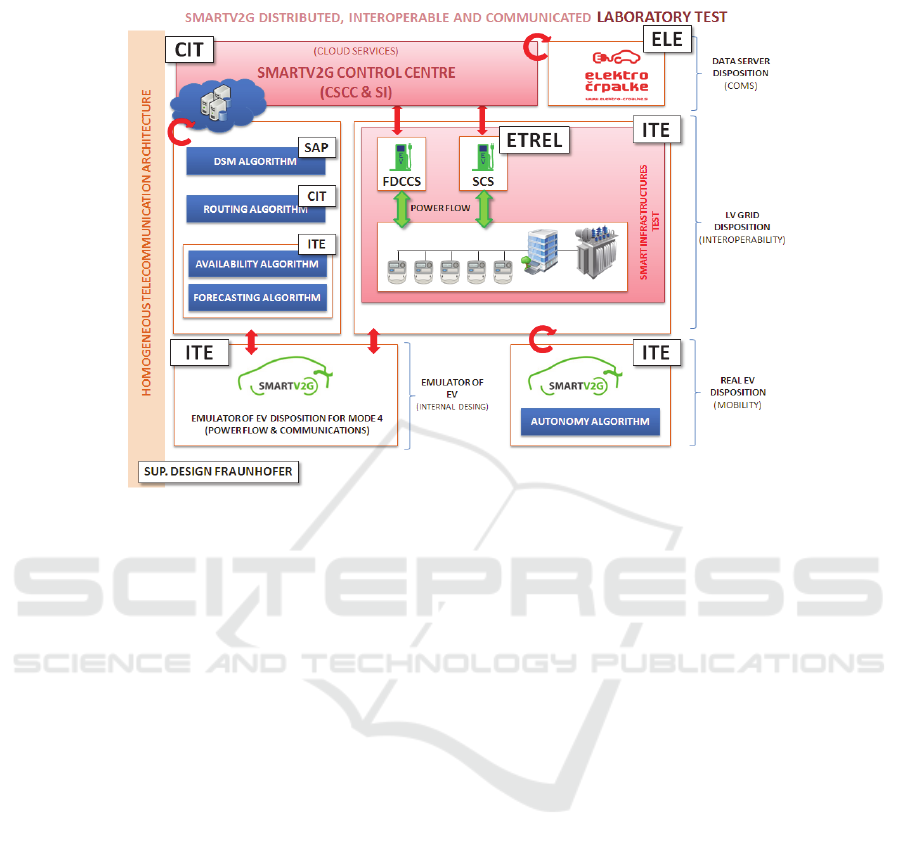
Fig. 3. the planning model of laboratory test achieved in where all subsystems of SMARTV2G
have been tested and validated in a common scenario.
been installed within the Elektro Ljubljana intranet in order to allow V2G Load area
operator to (1) collect and store the data of by receiving information about the
performed charging sessions from several charging stations, (2) remotely
management of the charging station within the same Load Area, (3) creation of new
charging stations within the system, using a guideline to create them, (4) manage of
charging station maintenance. Firstly, managing the maintenance of each charging
station, selecting time, duration, frequency, etc. Secondly, the capacity of apply a
corrective maintenance if something goes wrong in one of those charging stations, (5)
fitted with an innovative module based on a Demand Side Management algorithm
which allows the local area operator of make a simulation for this day load profile
taking into account the already saved reserves for each charging station inside the
local area and (6) visualization of several interactive charts (representing the output of
several developed algorithms) are provided to the local area operator, which contains
relevant information about the current grid status and some prediction about charge
availability, load forecast, etc.
8 Actual State of MOBINCITY Project
During the initial phase of MOBINCITY project there have been designed and
developed STM, PIIS and the integration with Electric Vehicle System Equipment.
This electro-mobility system provides a collection of live traffic information,
8
EPS Barcelona 2014 2014 - European Project Space on Information and Communication Systems
8

periodically, the system server queries traffic information to some traffic detectors.
From these detectors, the MOBINCITY software receives road information including
occupation, speed, intensity, composition of light and heavy vehicles, measured
length of vehicles and average distance between vehicles. Moreover, it collects
weather information, relative humidity, temperature, wind speed, wind direction,
pressure, solar radiation and rain and ice conditions, which can have effect on the
road conditions and, consequently, on the electric vehicle performance (speed, energy
consumption and other useful variables). Furthermore, charging station-parking
information becomes into an input of MOBINCITY system including the distance
between the car and the station or the duration of the trip between the car and the
station. This provides to users the necessary information to avoid traffic congestions
and use the most convenient route, taking into account traffic, road and weather
conditions.
This route planning algorithm is an optimization algorithm providing service to
MOBINCITY users as a navigation support tool taking into account all the FEV
mobility specifics and constraints, as well as the FEV user - the mobile citizen
preferences regarding other modes of transport and driving preferences.
On the other hand, there has been working on the adaptation of charging
infrastructure management (development of the Electric Vehicle Supply Equipment
(EVSE) and its operation) to FEV user needs without deterioration of grid operation
and with maximum possible benefit for the FEV user as well as for the Electric
Vehicle Supply Equipment Operators (EVSEO) and the grid agents (Distribution
System Operators (DSO), Retailers and DER Operators).
Following activities will deal with the integration of all communication systems
through the Master Interaction Aggregator (MIA) get information from the slave
aggregators, process it with the algorithms developed and find the best-optimized
routes. Moreover, the MIA will be integrated in a real FEV, connecting this
information unit to other systems of the car. The main connections with the Main
Control System of the FEV (MCS) will be with the battery management system
(BMS) and the in-wheel drive controller. By the time connections and interfaces will
be established, in order to validate the system in nearly real conditions, before testing
in real city environments, next activities will be developed an (1) integration of the
new information system EV on board and test, (2) establish communication with EV-
Information Network (EVIN), (3) test of the stability and availability of links in
various telecommunications networks and (4) testing in pilot facilities.
9 Future Outlook and Conclusion
Despite the great progress that has been made in the two FP7 funded projects,
SMARTV2G and MOBINCITY, there is still a long way to a European wide smart
charging infrastructure as well as for a smart mobility enhancement solution for EVs.
So even after the successful completion of the two projects there is still big demand
for further development in order to bring them to market maturity. Many of the used
standards are still under development moreover they must also prevail on the vehicle
side. Financing and business models for the development and operation of the
infrastructure have to be established as well as the charging and roaming agreements
9
The Green Mobility Grid of the SmartCity
9

between all kind of operators and involved countries. Nevertheless, now is the right
time to establish a standardised European wide smart charging infrastructure and
related smart mobility enhancement solutions, because they have to be in place when
the EV will become a mass market product.
Abbreviations
BMS Battery Management System
CSO Charging Station Operators
DER Distributed Energy Resources
DSM Demand Side Management
DSO Distribution System Operators
EV Electric Vehicle
EVIN EV-Information Network
EVSE Electric Vehicle Supply Equipment
EVSEO Electric Vehicle Supply Equipment Operators
FEV Fully Electric Vehicle
ITS Intelligent Transport Systems
MCS Main Control System of the FEV
MIA Master Interaction Aggregator
MOBINCITY Smart Mobility in Smart City
PIIS Proactive Intelligent Information Service
SMARTV2G Smart Vehicle to Grid Interface
STM Smart Transport Middleware
V2G Vehicle to Grid
V2I Vehicle to Infrastructure
References
1. International Energy Agency (IEA), “World Energy Outlook 2008,” IEA Publications,
Paris, 2008.
2. ISO IEC 15118- Part 1: general information and use-case definition: http://www.iso.
org/iso/catalogue_detail.htm?csnumber=55365.
3. Di Giorgio, A. ; Dept. of Comput., Control & Manage. Eng. A. Rubert, Sapienza Univ. of
Rome, Rome, Italy ; Liberati, F. ; Canale, S.; Control & Automation (MED), 2013 21st
Mediterranean Conference; ISBN: 978-1-4799-0995-7.
4. ETSI ES 202 663: http://www.etsi.org/deliver/etsi_es%5C202600_202699%5C202663%
5C01.01.00_60%5Ces_202663v010100p.pdf.
5. ETSI TS 556-1- : http://www.etsi.org/deliver/etsi_ts/101500_101599/10155601/01.01.01_
60/ts_10155601v010101p.pdf.
6. ETSI TS 556-3- : http://www.etsi.org/deliver/etsi_tr/101600_101699/101607/01.01.01_60/
tr_101607v010101p.pdf.
10
EPS Barcelona 2014 2014 - European Project Space on Information and Communication Systems
10
