
Task Specification by Demonstration based on the Framework for
Physical Interaction Approach
Angel P. del Pobil
1
and Mario Prats
2
1
Robotic Intelligence Lab, Jaume-I, University, Castellón, Spain
2
Google, Mountain View, CA 94043, U.S.A.
Abstract: We present a new method for building an abstract task representation from a single human-guided
demonstration. We call it the Specification by Demonstration Approach and it is based on our Framework
for Physical Interaction (FPI). Guided by a human instructor, a robot extracts a set of key task references
and relates them to a visual model of the object. A physical interaction task representation is built and stored
for its future use. The robot makes use of visual and force feedback both during the demonstration and in
future autonomous operation. Some experiments are reported.
1 INTRODUCTION
Future robot companions will have to work in
human spaces and deal with objects that they have
never seen before. Many of these objects will be
home appliances such as diswashers, washing
machines, TV sets, etc. that need a specific
interaction procedure for its use. Therefore, methods
for teaching physical interaction tasks are needed.
Most approaches to Programming by Demonstration
(PbD) focus on task representations at the joint level
(Calinon, 2009), which cannot easily adapt to wide
variations in the working scenario. In order to solve
this problem, other approaches focus on abstract task
representations that are independent of the robot
configuration.
Most of these works are based on qualitative
descriptions of the robot environment, e.g. trying to
reach a desired pose of the objects relative to each
other, mostly for applications involving pick and
place actions (Ekvall and Kragic, 2005). In this work
we focus on building abstract task representations
for interacting with home appliances through vision
and force feedback. We introduce the Specification
by Demonstration approach, based on our previous
work on a framework for specification of physical
interaction tasks (FPI) (Prats et al., 2013). The main
idea is to automatically build an abstract robot-
independent representation of the task from a single
user demonstration. First, the user introduces a new
object to the robot and indicates a visual reference
for its localization. Then, the user shows a new task
on this object to the robot, by manually guiding the
robot hand. After that, the robot reproduces the same
motion by its own, and the user validates. Then, a
physical interaction task specification is built from
the position, vision and force feedback logged
during the teaching process. This abstract
information is structured in an XML format and
stored in a database for its future use.
2 HUMAN-GUIDED TASK
SPECIFICATION
The following steps are performed for showing a
new task to the robot:
1) First, the user indicates the name of the object.
If the object already exists in the database, the robot
loads the tasks that have been already specified and
the visual reference used for tracking the object. The
user has the option to add a new task, modify an
existing task, or specify a visual reference. The
visual reference is currently specified by clicking on
four points of a rectangular region with clearly
visible edges. The robot then asks for the dimensions
of the rectangular patch. With this information, a
visual model is built and the patch pose is retrieved
and tracked using the Virtual Visual Servoing
method (Comport et al., 2004), (Sorribes et al.,
2010). By stereo visual processing, the need for
specifying the patch dimensions could be avoided.
2) For teaching a new task on an object, the user first
introduces the task name, and then guides the robot
hand
through the different steps of the task. This is
Del Pobil A. and Del Pobil A.
Task Specification by Demonstration based on the Framework for Physical Interaction Approach.
DOI: 10.5220/0006813000010001
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2014), pages 5-7
ISBN: 978-989-758-039-0
Copyright
c
2014 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
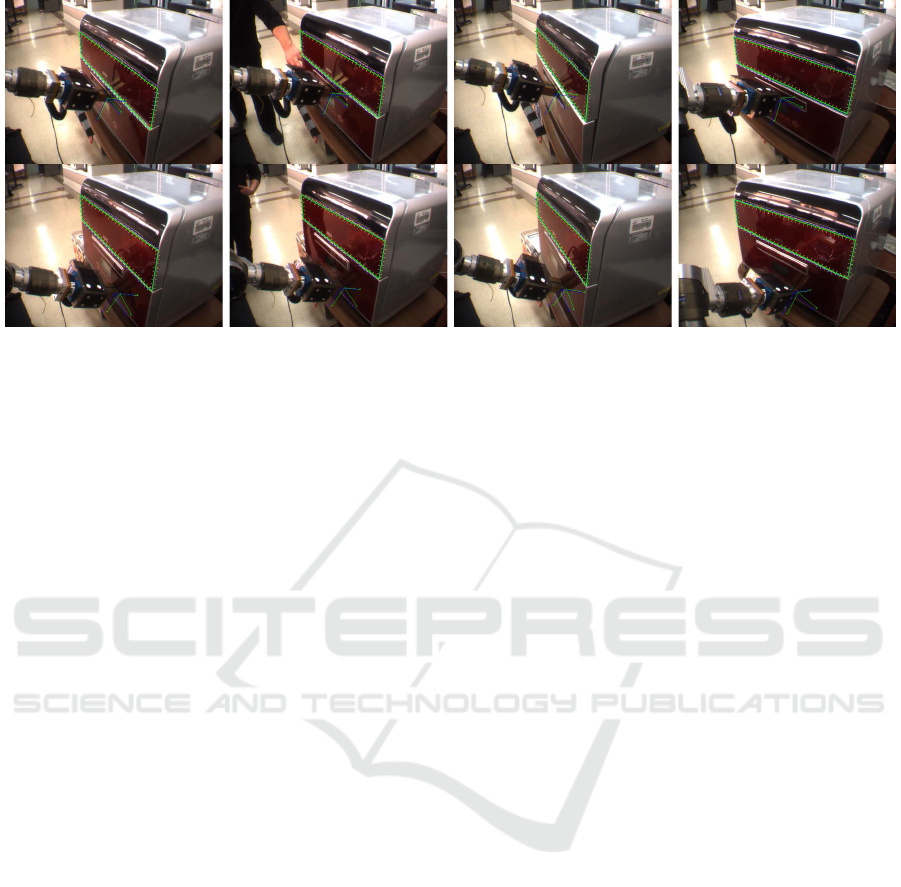
Figure 1: The mobile manipulator reproducing the task under different orientations of the object. The top row shows the
opening task, done by pushing on a large button. The bottom row shows the switch on task, that requires pushing a smaller
button. The images show only the moment in which the robot makes contact.
done thanks to a force sensor placed at the robot
wrist. During this step the robot stores the joint
trajectories. 3) After that, the robot tries on its own
and performs the task by reproducing exactly the
same joint trajectories while logging the end-effector
trajectory, the forces generated and the object pose.
We assume that the object pose does not change
between steps 2 and 3. The goal of this step is to log
the interaction forces, which is not possible in step 2,
due to the fact that the human guidance introduces
forces that cannot be distinguished from the
interaction forces. 4) From the end-effector
trajectory, forces and object pose, a set of frames
and velocity/force references relative to the object
pose are set, and a XML file describing the task is
generated.
Everything is computed relative to the visual
reference pose, and, therefore, the same task can be
always reproduced as long as the visual reference
has been localized. The task is specified according to
our FPI framework (Prats et al., 2013).
3 TASK REPRODUCTION
When the user asks the robot to perform a task on a
object, the corresponding XML file is loaded, and
the following steps are performed:
1) The robot first loads the visual reference model
and asks for a pose initialization. Currently the
user has to click on the visual reference,
although we are making automate this process
automatic. After the visual reference is
initialized, its edges are tracked and the full pose
is continuously estimated.
2) After the pose is estimated, the robot goes to the
contact point (relative to the visual reference)
and applies the required force.
Figure 1 shows four different reproductions of the
two tasks under different poses of the dishwasher.
4 CONCLUSION
This paper describes our work in progress towards
the automatic specification of physical interaction
tasks from a single demonstration assisted by a
human. The main application concerns showing our
future robot companions how to interact with
household appliances in a manner that can be easily
transferred to other robots. We adopt an approach
similar to what is done for showing this kind of
interaction to other humans: first we show how to
perform the task, then we let the other do the task
without our intervention and either approve it or
show the task again. The proposed approach relies
on our previously published physical interaction
framework, that allows to specify grasping and
interaction tasks in a robot-independent manner.
Therefore, tasks shown to one robot can be reused
by other robots, without the need of showing the
task again. This work is still preliminary and needs
further development, specially concerning reducing
the instructor intervention in aspects like reporting
the visual reference dimensions or making the pose
initialization. In addition, further experiments have
to be performed with different objects and
considering tasks that require several sequential
actions.

ACKNOWLEDGEMENTS
Support for this research was provided in part by
Ministerio de Economía y Competitividad
(DPI2011-27846), by Generalitat Valenciana
(PROMETEO/2009/052) and by Universitat Jaume I
(P1-1B2011-54). The authors wish to thank Prof.
Sukhan Lee for many helpful discussions and for
granting access to the Intelligent System Research
Center (Sungkyunkwan University, Korea) for the
experiments shown in Fig. 1.
REFERENCES
S. Calinon. Robot Programming by Demonstration: A
Probabilistic Approach. EPFL/CRC Press, 2009.
A. I. Comport, E. Marchand, and F. Chaumette. Robust
model-based tracking for robot vision. In IEEE/RSJ
Int. Conf. on Intelligent Robots and Systems, IROS04,
pages 692–697, 2004.
S. Ekvall and D. Kragic. Grasp recognition for
programming by demonstration. In IEEE International
Conference on Robotics and Automation, pages 748–
753, 2005.
M. Prats, A.P. del Pobil and P. J. Sanz, , Robot Physical
Interaction through the combination of Vision, Tactile
and Force Feedback , Springer Tracts in Advanced
Robotics, Vol. 84, Springer, Berlin, 2013.
J. Sorribes, M. Prats, and A. Morales. Visual robot hand
tracking based on articulated 3d models for grasping.
In IEEE International Conference on Robotics and
Automation, Anchorage, AK, May 2010.
BRIEF BIOGRAPHY
Angel Pasqual del Pobil is Professor of Computer
Science and Artificial Intelligence at Jaume I
University (Spain), founder director of the UJI
Robotic Intelligence Laboratory, and a Visiting
Professor at Sungkyungkwan University (Korea). He
holds a B.S. in Physics (Electronics, 1986) and a
Ph.D. in Engineering (Robotics, 1991), both from
the University of Navarra. He has been Co-Chair of
two Technical Committees of the IEEE Robotics and
Automation Society and is a member of the
Governing Board of the Intelligent Autonomous
Systems (IAS) Society and EURON. He has over
230 publications, including 11 books the last two
published recently by Springer: Robot Physical
Interaction through the combination of Vision,
Tactile and Force Feedback (2013) and Robust
Motion Detection in Real-life Scenarios (2012).
Prof. del Pobil was co-organizer some 40 workshops
and tutorials at ICRA, IROS, RSS, HRI and other
major conferences.. He was Program Co-Chair of
the 11th International Conference on Industrial and
Engineering Applications of Artificial Intelligence,
General Chair of five editions of the International
Conference on Artificial Intelligence and Soft
Computing (2004-2008) and Program Chair of
Adaptive Behaviour 2014. He is Associate Editor for
ICRA (2009-2013) and IROS (2007-2013) and has
served on the program committees of over 115
international conferences, such as IJCAI, ICPR,
ICRA, IROS, ICINCO, IAS, ICAR, etc. He has been
involved in robotics research for the last 27 years,
his past and present research interests include:
humanoid robots, service robotics, internet robots,
motion planning, mobile manipulation, visually-
guided grasping, robot perception, multimodal
sensorimotor transformations, robot physical and
human interaction, visual servoing, robot learning,
developmental robotics, and the interplay between
neurobiology and robotics. Professor del Pobil has
been invited speaker of 56 tutorials, plenary talks,
and seminars in 14 countries. He serves as associate
or guest editor for eight journals, and as expert for
research evaluation at the European Commission. He
has been Principal Investigator of 28 research
projects. Recent projects at the Robotic Intelligence
Lab funded by the European Commission include:
FP6 GUARDIANS (Group of Unmanned Assistant
Robots Deployed In Aggregative Navigation
supported by Scent detection), FP7 EYESHOTS
(Heterogeneous 3-D Perception Across Visual
Fragments), and FP7 GRASP (Emergence of
Cognitive Grasping through Emulation,
Introspection, and Surprise).
