
Speckled Images Segmentation and Algorithm Comparison
Luigi Cinque
1
, Rossella Cossu
2
and Rosa Maria Spitaleri
2
1
Dipartimento Informatica, Universit´a degli Studi, Sapienza, Via Salaria 113, 00185 Roma, Italy
2
Istituto per le Applicazioni del Calcolo-CNR, Via dei Taurini 19, 00185 Roma, Italy
Keywords:
Speckle, Image Segmentation, Level Set, Partial Differential Equation.
Abstract:
An image segmentation process, based on the level set method, consists in the time evolution of an initial
curve until it reaches the boundary of the objects to be extracted. Classically the evolution of the initial curve
is determined by a speed function. In this paper, the speed in the level set procedure is characterized by the
combination of two different speed functions and the resulting algorithm is applied to speckled images, like
SAR (Synthetic Aperture Radar) images. In order to assess improvements of the segmentation performance,
the computational process is tested on synthetic and then applied to real images. Performances are evaluated
on synthetic images by using the Hausdorff distance. The real SAR images were acquired during the ERS2
mission.
1 INTRODUCTION
We face the problem of speckled images segmenta-
tion, like the SAR images. It is well known that the
presence of speckle, modeled as a strong multiplica-
tive noise, makes regions detection a very compli-
cated issue.
In the last decades, variational methods, based on
the Γ − convergence property (Mumford and Shah,
1989), (Spitaleri, March and Arena,1999), (Cinque,
Cossu and Spitaleri, 2014) or the level set approach,
(Sethian, 1999), (Sethian, 2001),(Osher and Fedkiw,
2002) (Cinque and Cossu, 2011) leading to solve par-
tial differential equations (PDEs), have been impor-
tant tools for solving image segmentation problems.
References show that we have been developing varia-
tional segmentation algorithms by both approaches.
The level set segmentation is characterized by the
implicit representation of a curve that evolves over
time, defined as the zero level of a 3D level function
(Sethian, 1999), (Sethian, 2001),(Osher and Fedkiw,
2002).
Active contours methods had a fundamental role
in image segmentation. They are computer gener-
ated curves that move within the image to find the the
boundaries of the regions under the influence of inter-
nal and external forces (Kass, Witkin and Terzopulos,
1988) (Chan and Vese, 2001). The evolution of the
curve is carried out in accordance with a speed func-
tion, fundamental step to achieve a good segmenta-
tion.
In this paper we present a new speed, which is the
linear combination of two different speed functions:
the first speed, called average-based speed (Ben Ayed,
Mitiche and Belhadj, 2005), (Mitiche and Ben Ayed,
2011) (Ben Salah, Ben Ayed and Mitiche, 2012) de-
pends on the mean gray values of the two regions,
foreground and background, identified by the curve,
the second speed, called gradient-based speed, de-
pends on the image gradient previously processed
with a SRAD (Speckle Reducing Anisotropic Diffu-
sion) filter (Yongjian and Acton, 2002) to reduce the
speckle noise.
We compare the results of the segmentation ob-
tained applying the level set equation with the new
combined speed either the average-based or the
gradient-based speed separately. Our approach is val-
idated by tests on synthetic speckled images; in par-
ticular by calculating the Hausdorff distance between
the real contours and computed ones, we compare re-
sults in quantitative way (Huttenlocher, Klanderman
and Rucklidge, 1993).
The Hausdorff distance measures the maximum of
minimum distances between two subsets in a metric
space, in our case between the sets of points belong-
ing to the known and the computed contours of the
test images.
We present and discuss results related to one or more
objects, with non convex boundaries, corrupted by
speckle noise, test images and SAR images. The SAR
PRI (Precision Images)images here segmented were
acquired during ERS2 mission. ERS2 SAR system is
111
Cinque L., Cossu R. and Maria Spitaleri R..
Speckled Images Segmentation and Algorithm Comparison.
DOI: 10.5220/0005166901110118
In Proceedings of the International Conference on Pattern Recognition Applications and Methods (ICPRAM-2015), pages 111-118
ISBN: 978-989-758-077-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

capable of 25 m. resolution from an altitude of 800
km, at radar wavelength of 5.7 cm.
The paper is organized as follows. In Section 2,
the level set method is briefly described. In Section
3, speed computation related to level set method is in-
troduced. In Section 4, experimental results, perfor-
mance evaluation on test problems and application to
SAR images are shown. Some conclusions are drawn
in Section 5.
2 MATHEMATICAL MODELING
The level set function is characterized by the implicit
representation of a curve. It is defined as a signed dis-
tance function, where the points of the curve assume
zero value, while at any other point the value of the
function is given by the minimum distance between
this point and the curve.
Since the image segmentation consists in the ex-
tracting the boundary of regions of interest from an
image. This boundary may be considered as a curve
belonging to a family whose time evolution is de-
scribed by a level set equation. In order to resolve this
equation, an iterative process computes the evolution
of the initial curve corresponding to the resolution of
the differential equation in partial derivatives.
2.1 Curve Evolution by Level Set
In order to obtain the governing equation of
a front evolution we consider a family of
parametrized closed contours (t is the parame-
ter) C(x(t),y(t),t) : [0,∞) → R
2
, generated by
evolving an initial contour C
0
(x(0),y(0),0). We
underline that in the curves evolution theory the
geometric shape of the contour is determined by the
normal component of the evolution velocity.
If F(x(t),y(t),t) is a scalar function representing
the curve speed in the normal direction~n, the normal
velocity components are
dx
dt
= F(x(t),y(t),t) · n
1
dy
dt
= F(x(t),y(t),t) · n
2
with ~n ≡ (n
1
,n
2
). So that the curve evolves in time
according to the following equation
∂C(x(t),y(t),t)
∂t
= F(x(t),y(t),t) ·~n (1)
Supposing that C(x(t),y(t),t) is a moving front in
the image, if we embed this moving front as the
zero level of a smooth continuous scalar 3D func-
tion φ(x(t),y(t),t), known as the level set func-
tion, the implicit contour at any time t is given by
C(x(t),y(t),t) ≡ {(x(t), y(t))/φ(x(t), y(t),t) = 0}.
By differentiating respect to t the expression
φ(x(t),y(t),t) = 0 the equation of motion for the level
set function may be derived
∂φ(x(t),y(t),t)
∂t
+ F(x(t),y(t),t) · n
1
∂φ(x(t),y(t),t)
∂x
+
+ F(x(t),y(t),t) · n
2
∂φ(x(t),y(t),t)
∂y
= 0
(2)
Being now
n
1
=
∂φ(x(t),y(t),t)
∂x
|∇φ(x(t),y(t),t)|
n
2
=
∂φ(x(t),y(t),t)
∂y
|∇φ(x(t),y(t),t)|
where |∇φ(x(t),y(t),t)| 6= 0 for all (x(t), y(t) ∈
C(x(t),y(t),t), the equation (2) becomes
∂φ(x(t),y(t),t)
∂t
+
F(x(t),y(t),t)
|∇φ(x(t),y(t),t)|
+
·[(
∂φ(x(t),y(t),t)
∂x
)
2
+ (
∂φ(x(t),y(t),t)
∂y
)
2
] = 0
Moreover for simplicity we can write x ≡ (x(t), y(t)),
C ≡ C(x,y,t)
or also
∂φ(x,t)
∂t
+ F(x,t)|∇φ(x,t)| = 0 (3)
In the following, an important intrinsic geometric
property will be used, that is the curvature of level
set (Sethian, 2001), is given by
k = −∇ ·
∇φ(x,t)
|φ(x,t)|
. (4)
2.2 Level Set Implementation
The numerical implementation of equation (3) is re-
alized by performing a discretization with respect to
time.
In the process of evolution of the curve, the level set
function can lose the properties of the distance for the
sake of approximation. To reduce calculation errors
and ensure stability to the method, the function φ(x,t)
is periodically re-initialized after a certain number of
iterations.
The distance calculation is performed in the pro-
cess of re-initialization, in order to transformthe func-
tion φ(x,t) in a signed distance function (Li, Xu, Gui
and Fox, 2010), by computing the current distance
function.
In the implementation, for the numerical approxima-
tion of the level set equation in a domain Ω ⊂ ℜ
2
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
112

we introduce the computational domain Ω
∗
obtained
by considering a uniform partition of Ω in (N − 1) ×
(M − 1) disjoint rectangles Ω
ij
with edges ∆x = ∆y
which usually in an image are ∆x = ∆y = 1.
Let P
i, j
≡ P(x
i
,y
j
)(i = 1,...,N; j = 1, ...,M) be a point
in Ω
∗
and φ
n
i, j
the value of the function φ(x,t) at P
i, j
at time t
n
.
The algorithm starts by initializing φ(x,t) as a
signed distance function, depending on interior or ex-
ternal points of curve C
φ(x,t = 0) = ±d
where
d(x) = min
x
C
∈C
|x− x
C
|.
Now, known the value of φ
n
i, j
, the value φ
n+1
i, j
is com-
puted by a 2-order ENO scheme with the TVD (Total
Variation Diminishing) Runge Kutta scheme for the
time integration. The iterative process ends when the
curve is stable or when it ceases its evolution, that is
at convergence.
We underline that the definition of φ(x,t) as a
signed distance function is crucial.
Moreover the choice of an appropriate speed function
is a fundamental task for this segmentation approach.
This function is computed by the original image, as it
is described in the following section.
3 CURVE SPEED
In this section we present a synthetic introduction of
the combined speed obtained by the contribution of
the two speed functions (Cinque and Cossu, 2011). In
this work we assume two types of regions, foreground
and background, R
i
i ∈ {1,2},
Let I(x) be the SAR image intensity which is mod-
eled by a Gamma distribution. After some probabilis-
tic considerations and algebraic manipulations we ob-
tain the average-based speed (Mitiche and Ben Ayed,
2011) in the form
F(x,t) =
dC
dt
=
= −
logµ
R
1
+
I(x)
µ
R
1
− logµ
R
2
−
I(x)
µ
R
2
+ λk
(5)
where λk is a regularizationterm, with λ ∈ (0,1) and k
the mean curvature function, µ
R
i
is the mean intensity,
with a
R
i
the area of the region R
i
, that is
µ
R
i
=
R
R
i
I(x)dx
a
R
i
a
R
i
=
Z
R
i
dx.
The gradient-based function is computed as the gra-
dient magnitude of the original image and represents
the front speed point by point (Cerimele, Cinque and
Cossu, 2009).
It is well known that in images corrupted by strong
noise, the computation of the gradient could detect
false edges. For this reason, the speckle image is pre-
processed by means of the SRAD algorithm which
is an extension of Perona-Malik algorithm (Yongjian
and Acton, 2002), (Perona and Malik, 1990).
The gradient-based speed (Sethian, 1999) is com-
puted on the filtered image
F(x,t) = −
1
1+ |∇I
′
(x)|
2
− λk
where I
′
(x) is the image I(x) filtered by SRAD, k is
the curvature and λ ∈ (0,1) is a constant. So, the
speed term is defined in such a way that the curve pro-
ceeds rather fast in low gradient zones, while it wades
through to high gradient ones.
The new velocity is the linear combination of the
average-based and gradient-based speed and it is
given by the following expression:
F(x,t) = −α
log
µ
R
2
µ
R
1
+ I(x)
µ
R
1
− µ
R
2
µ
R
1
µ
R
2
+
− (1− α)
1
1+ |∇I
′
(x)|
2
− λk.
(6)
where α ∈ (0,1) .
We can substitute the speed F(x,t) (6) in the equation
level set (3).
The function φ(x,t) is the computed contour of the
extracted region at the convergence. The segmenta-
tion, indeed, is defined by the convergence for t → ∞
of (3).
The procedure developed by using the combined
speed improves the results obtained by the two speeds
separately. We obtained the best results of segmenta-
tion setting, mainly, the parameter α = 0.5.
4 EXPERIMENTAL RESULTS
In this section we apply the proposed algorithm to
both synthetic and SAR images (Cinque and Cossu,
2011).
4.1 Application to Synthetic Images
We tested the procedure on synthetic images to have
an exact reference of the contours to be detected .
In this paper,to evaluate the efficiencyof the proposed
speed, we calculated the Hausdorff distance between
SpeckledImagesSegmentationandAlgorithmComparison
113
the pixels of the known and computed contours of the
synthetic images. Then we show the quantitative and
qualitative comparison between resulting contours.
The Hausdorff distance H measures the maximum of
minimum distances between the points of two con-
tours. Given the contours A = {a
1
,. .. a
n
} and B =
{b
1
,. .. b
n
}, the Hausdorff distance is defined as
H(A, B) = max(h(A,B),h(B,A))
where
h(A,B) = max
a∈A
min
b∈B
ka− bk
ka− bk is any metric between the points of A
and B (e. g.the Euclidean distance) (Huttenlocher,
Klanderman and Rucklidge, 1993).
The following test image has been synthesized from
an original image without noise, by copying a speckle
pattern from SAR image.
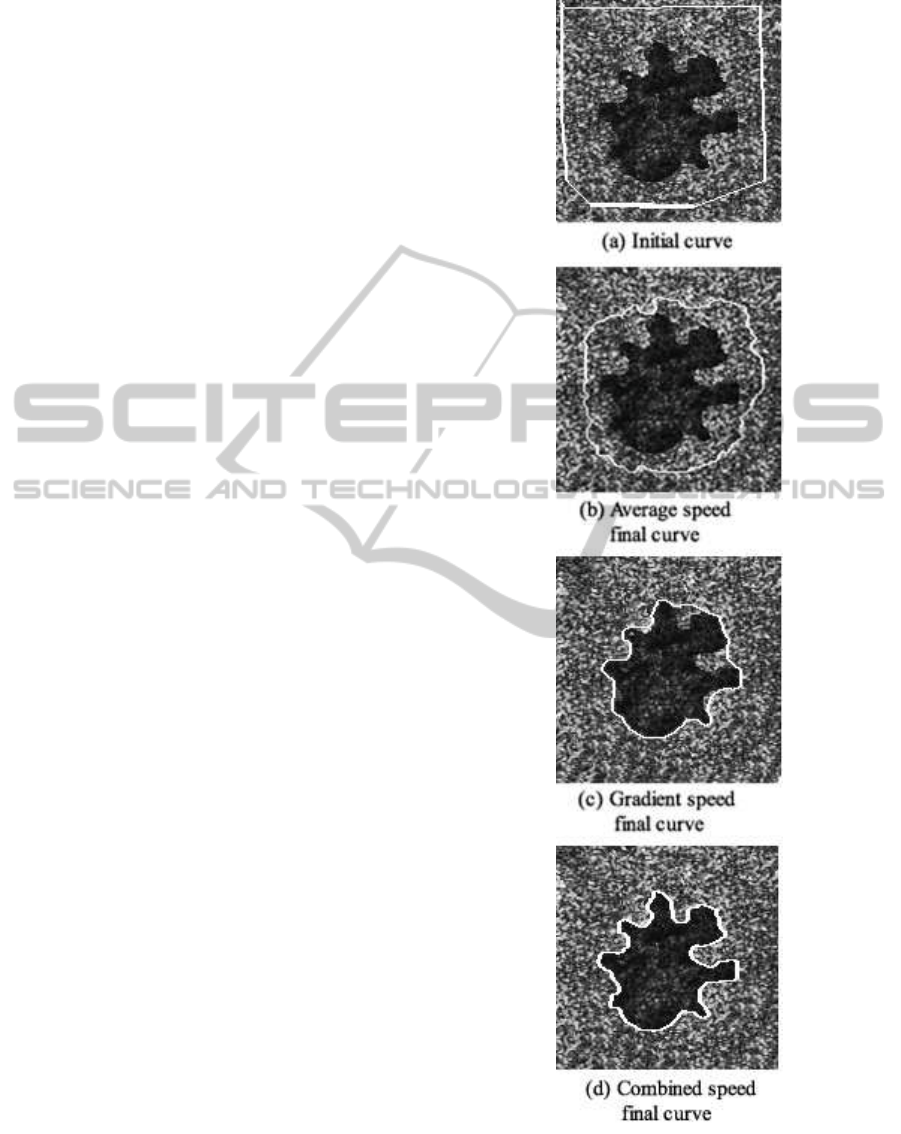
Fig. 1 shows the images with the initial curve (a) and
the corresponding results obtained by applying the
level set equation, using the average-based speed (b),
the gradient-based speed (c) and combined speed (d)
respectively.
As recalled in Section 3, in the case of the compu-
tation of the gradient-based speed, the filter SRAD
is applied to the image to preserve and enhance the
edges (Yongjian and Acton, 2002). We solve (3) with
(6), varying the parameter α, with α ∈ (0,1) and
setting the parameter λ with λ = 0.3. We recall that
λ ∈ (0,1) and it indicates the weight, associated with
the component speed that depends on the curvature
k. Then the distance H between the known and
computed contours is also computed for performance
evaluation.
The results are the following:
• the chosen initial contour of Fig.1 (a) has the H
distance from the real contour H = 63.78.
• the computed contour of Fig.1 (b), obtained by
setting the parameter α = 0.9, has the H distance
from the real contour H = 43.56. As given by (6),
the value α = 0.9 implies a very low contribution
of the gradient-based speed, thus we can note that
this contour is mainly computed by average-based
speed.
• the computed contour of Fig.1 (c), obtained by
setting the parameter α = 0.1, has the H distance
from the real contour H = 23.02. In this case by
(6), the value α = 0.1 implies the very high contri-
bution of gradient-based speed mainly. As above
written, the level set equation is computed on the
filtered image.
Figure 1: Speckled test image (150×150): (a) Starting con-
tour, (b) final contour by average-based speed, (c) final con-
tour by gradient-based speed, (d) final contour by combined
speed.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
114

• the computed contour of Fig. 1 (d), obtained by
setting the parameter α = 0.5, has the H distance
from the known contour H = 3.01. α = 0.5 deter-
mines the best result.
In this type of image the best results are computed, if
the value of alpha is such that the contributions of the
two speeds are similar, that is this α value balances
the results of the two speeds.
In Fig. 2 we can see the result obtained from
synthetic images constituted by background and three
objects to be extracted. This image is corrupted by
speckle noise of variance = 0.2. In Fig. 2, (a) and (b)
the objects have the same gray levels, whereas (c) and
(d) have three different gray levels. In Fig. 2, (b) and
(d) the results have been obtained by setting α = 0.5
and λ = 0.3.
In Fig. 3 we can see the overlapping of the results,
in particular in Fig. 3 (a) the contours have a distance
H = 4. and in Fig. 3 (b) H = 7.
4.2 Application to SAR Images
In this section we present some results performed by
applying the combined procedure on SAR images ac-
quired during ERS2 mission (2000).
ERS2 SAR system is capable of 25 m. resolution
from an altitude of 800 km, at radar wavelength of
5.7 cm.
In Fig. 4 the SAR images, representing part of the
coast of the Netherlands and a Baleari Island, are pre-
sented and the results obtained applying the level set
procedure, based on combined speed, are shown.
In Fig. 4 (a) we notice an image with inho-
mogeneities regarding the intensity within the fore-
ground. We used α = 0.6 and λ = 0.3. The final re-
sult identifies three islands and the coast. In this case
is important to underline that more objects are seg-
mented also in SAR images. In Fig. 4 (b) we note an
image with a granular aspect, small contrast between
foreground and background. We used α = 0.5 and
λ = 0.3.
In Fig. 5 the result, obtained on a SAR image of
750× 750 pixels, representing part of the coast of the
Tuscan coast, is shown. The result is characterized by
indented contour and by little islands and α = 0.5 and
λ = 0.3.
Fig. 6 shows the result obtained on a SAR image
of 500 × 700 pixels depicting the Capraia Island for
α = 0.3 and λ = 0.3.
An example of indented contour is in Fig. 7,
that shows the result obtained on a SAR image of
600×600 pixels representing part of the coast of Elba
Island, setting α = 0.5 and λ = 0.3
In the Fig. 8 (a) we present the image of size 200×
(a) Initial curve
(b) Final Contours
(c) Initial curve
(d) Final contours
Figure 2: Speckled test images (200×200): (a) and(b)three
objects of the same gray level, (c)and (d) of different gray
levels
SpeckledImagesSegmentationandAlgorithmComparison
115
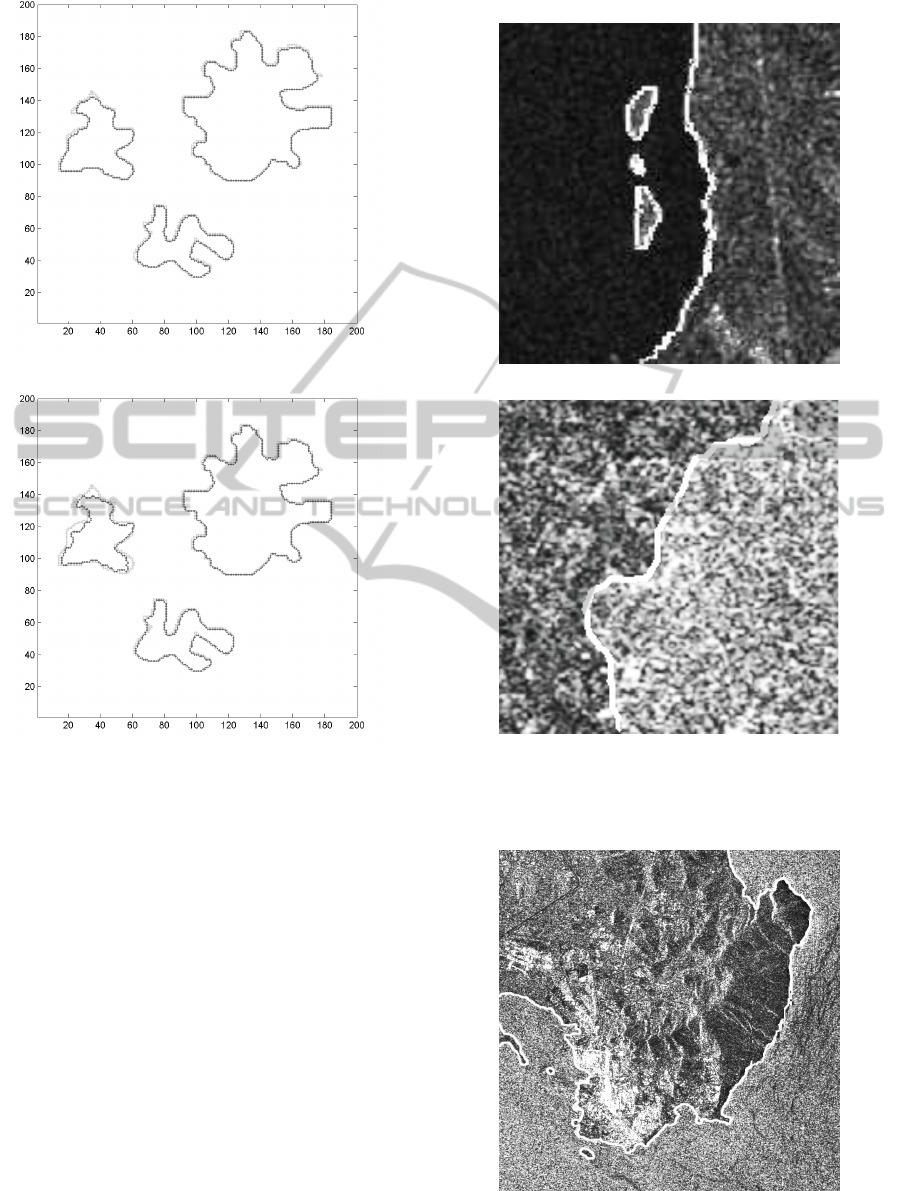
(a) H=4.
(b) H=7.
Figure 3: Hausdorff distance.
200 characterized by indented contour, representing
the Netherlands coast. The white line is portion of the
starting contour. The result of Fig. 8 (b) is obtained
for α = 0.4
The final results is more than satisfactory.
5 CONCLUSIONS
In this paper, we presented a level set segmentation
algorithm applied to both synthetic and real SAR im-
ages and we discussed performance evaluation re-
sults.
The segmentation algorithm, based on a speed
balancing both the average and the gradient speeds,
works better than ones driven mainly by a single sep-
arated speed.
Combining two different speed functions for
(a) Regular contours
(b) Inhomogeneous background
Figure 4: Contours extraction of SAR images: (a) Nether-
lands coast and (b) Baleari coast.
Figure 5: Contour extraction from the Tuscan image, α =
0.5.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
116
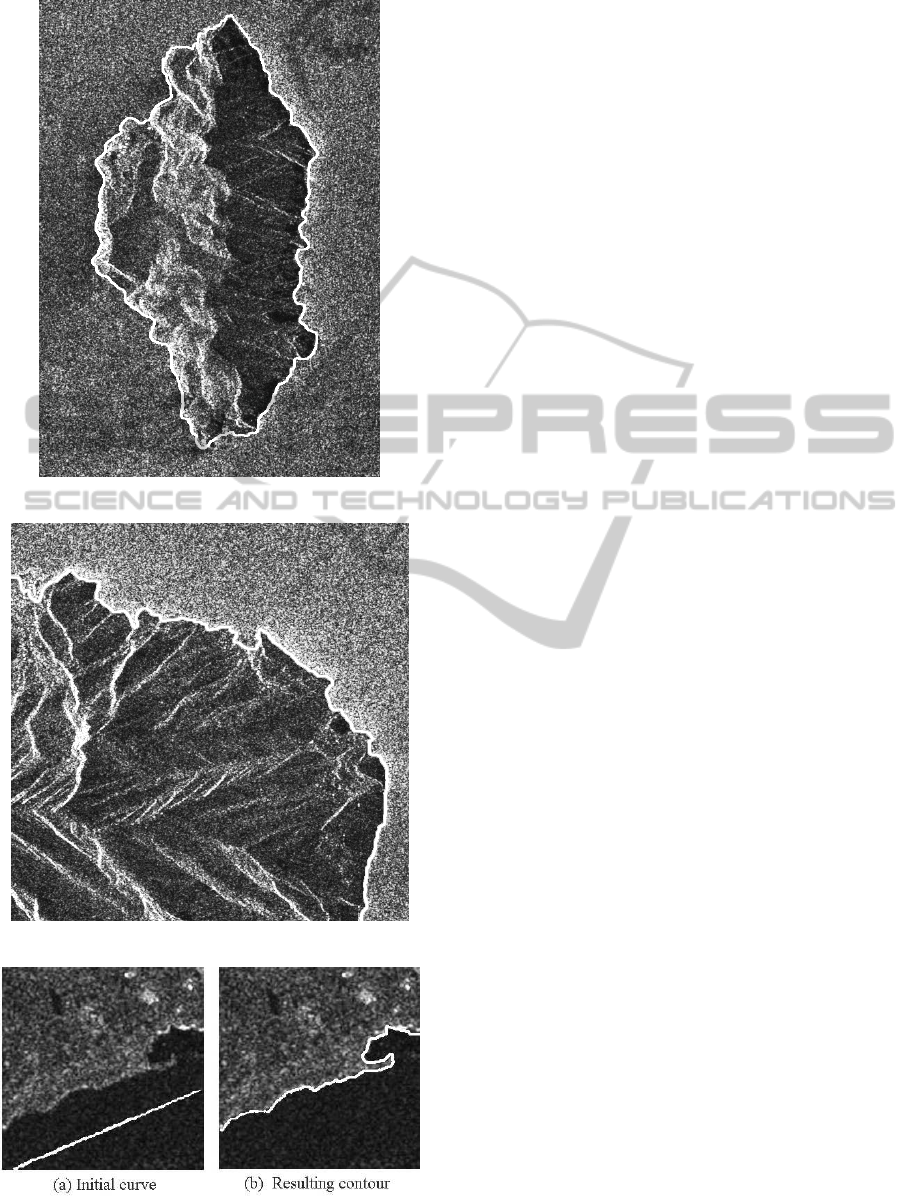
Figure 6: Contour extraction of the Capraia Island, α = 0.3.
Figure 7: Resulting contour of the Elba Island, α = 0.5.
Figure 8: Extraction contour: (a) original image and starting
contour, b) final contour, α = 0.4.
curve evolution level set allows more accurate
achievements of regions contours. We compared the
results obtained applying the level set algorithm for
the speckled test and real images segmentation. Re-
sults appear to be very promising for future develop-
ments.
In the future we plan to apply the proposed method-
ology to full resolution images obtained from (CSK)
COSMO-SkyMed constellation. The constellation
consists of 4 satellites, each one equipped with a mi-
crowave high-resolution synthetic aperture radar. It
is the most important Italian event in the Space-Earth
Observation environment in international field. We
are going to test and validate the proposed procedure
on images of the same regions acquired by different
SAR systems.
REFERENCES
Cinque, L. and Cossu, R. (2011). Region segmentation from
SAR images Lectures Notes Computer Science LNCS
6978 (ICIAP 2011), SPRINGER.
Sethian, J. A. (1999) Level set methods and fast marching
methods, Cambridge University Press, 1999.
Sethian, J. A. (2001) Evolution, implementation and ap-
plication of level set and fast marching methods for
advancing front, Journal of Computational Physics,
169 (2001).
Osher, S. and Fedkiw, R. (2002) Level set methods and
dynamic implicit surfaces, Springer-Verlag New York,
2002.
Ben Ayed, I. Mitiche, A. and Belhadj, Z. (2005), Multire-
gion level-set partitioning of synthetic aperture radar
images, IEEE Trans. Pattern Analysis and Machine
Intelligence, 27 (2005).
Mitiche, A. and Ben Ayed, I. (2011), Variational and
level set methods in image segmentation, (2011)
SPRINGER.
Ben Salah, M. Ben Ayed, I. and Mitiche, A. (2012), Ac-
tive curve recovery of region boundary patterns, IEEE
Trans. Pattern Analysis and Machine Intelligence, 34
(2012).
Yongjian, Yu and Acton Scott, T.(2002), Speckle reducing
anisotropic diffusion, IEEE Trans. on Image Process-
ing, 11 (2002).
Huttenlocher, D. Klanderman, G. and Rucklidge W. (1993)
Comparing Images Using the Hausdorff Distance,
IEEE Trans. Pattern Analysis Machine Intelligence,15
(1993).
Mumford, D. and Shah, J. (1989), Optimal approximations
by piecewise smooth functions and associated varia-
tional problems, Comm. Pure Appl.Math., 42 (1989).
Spitaleri, R. M. March, R. and Arena D. (1999), Finite
difference solution of Euler equation arising in varia-
tional image segmentation, Numerical Algorithms, 21
(1999).
SpeckledImagesSegmentationandAlgorithmComparison
117

Cinque, L. Cossu, R. and Spitaleri, R.M. (2014), Applied
variational SAR image segmentation, MASCOT12
& ISGG12 Proceedings, IMACS Series in Computa-
tional and Applied Mathematics,18 (2014).
Chan, T. F. and Vese, L. A. (2001), Active Contours without
edge, IEEE Trans. on Image Processing, 10 (2001).
Kass, M. Witkin, A. and Terzopoulos D. (2001), Snakes:
active contour models, Journal of Computational Vi-
sion, 1 (1988).
Cerimele, M.M. Cinque, L. and Cossu, R. (2009), Coast-
line detection from SAR images by level set model,
Lectures Notes Computer Science LNCS 5716 (ICIAP
2009), SPRINGER.
Perona, P. and Malik, J.,(1990) Scale space and edge detec-
tion using anisotropic diffusion, IEEE Trans. Pattern
Analysis and Machine Intelligence, 12 (1990).
Li, C. Xu, C. Gui and Fox, D. (2010), Distance regular-
ized level set evolution and its application to image
segmentation, IEEE Trans. on Image Processing, 11
(2010).
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
118
