
Thompson Sampling in the Adaptive Linear Scalarized
Multi Objective Multi Armed Bandit
Saba Q. Yahyaa, Madalina M. Drugan and Bernard Manderick
Department of Computer Science, Vrije Universiteit Brussel, Pleinlaan 2, 1050 Brussels, Belgium
Keywords:
Multi-armed Bandit Problems, Multi-objective Optimization, Linear Scalarized Function, Scalarized Function
Set, Thompson Sampling Policy.
Abstract:
In the stochastic multi-objective multi-armed bandit (MOMAB), arms generate a vector of stochastic normal
rewards, one per objective, instead of a single scalar reward. As a result, there is not only one optimal arm,
but there is a set of optimal arms (Pareto front) using Pareto dominance relation. The goal of an agent is to
find the Pareto front. To find the optimal arms, the agent can use linear scalarization function that transforms
a multi-objective problem into a single problem by summing the weighted objectives. Selecting the weights is
crucial, since different weights will result in selecting a different optimum arm from the Pareto front. Usually,
a predefined weights set is used and this can be computational inefficient when different weights will optimize
the same Pareto optimal arm and arms in the Pareto front are not identified. In this paper, we propose a
number of techniques that adapt the weights on the fly in order to ameliorate the performance of the scalarized
MOMAB. We use genetic and adaptive scalarization functions from multi-objective optimization to generate
new weights. We propose to use Thompson sampling policy to select frequently the weights that identify new
arms on the Pareto front. We experimentally show that Thompson sampling improves the performance of the
genetic and adaptive scalarization functions. All the proposed techniques improves the performance of the
standard scalarized MOMAB with a fixed set of weights.
1 INTRODUCTION
Multi-Objective Optimization (MOO) problem with
conflicting objectives is present everywhere in the
real-world. For instance, in shipping firm, the con-
flicting objectives could be consist of the shipping
time and the cost. At the same time, shorten shipping
time is needed in order to improve customer satisfac-
tion, while also reducing the number of used ships to
reduce the operating cost. It is obvious that adding
more ships will reduce the needed shipping time but
will increase the operating cost. The goal of the MOO
with conflicted objectives is to tradeoff the conflicting
objectives. The Multi-Objective Multi-Armed Ban-
dit (MOMAB) problem (Drugan and Nowe, 2013; S.
Q. Yahyaa and Manderick, 2014b) is the simplest ap-
proach to representing the MOO problem.
MOMAB problem is a sequential stochastic learn-
ing problem. At each time step t, an agent pulls one
arm i from an available set of arms A and receives a
reward vector r
r
r
i
from the arm i with D dimensions
(or objectives) as feedback signal. The reward vec-
tor is drawn from a probability distribution vector,
for example from a normal probability distribution
N(µ
µ
µ
i
,σ
σ
σ
2
i
), where µ
µ
µ
i
is the true mean vector and σ
σ
σ
2
i
is
the covariance matrix parameters of the arm i. The
reward vector r
r
r
i
that the agent receives from the arm
i is independent from all other arms and independent
from the past reward vectors of the selected arm i.
Moreover, the mean vector of the arm i has indepen-
dent D distributions, i.e. σ
σ
σ
2
is a diagonal covariance
matrix. We assume that the true mean vector and co-
variance matrix of each arm i are unknown parame-
ters to the agent. Thus, by drawing each arm i, the
agent maintains estimations of the true mean vector
and the diagonal covariance matrix (or the variance
vector) which are known as
ˆ
µ
µ
µ
i
and
ˆ
σ
σ
σ
2
i
, respectively.
The MOMAB problem has a set of Pareto optimal
arms (Pareto front) A
∗
, that are incomparable, i.e. can
not be classified using a designed partial order rela-
tions (Zitzler and et al., 2002). The agent has to fig-
ure out the optimal arms to minimize the total Pareto
loss of not pulling the optimal arms. At each time
step t, the Pareto loss (or Pareto regret) is the distance
between the set mean of Pareto optimal arms and the
mean of the selected arm (Drugan and Nowe, 2013).
55
Yahyaa S., Drugan M. and Manderick B..
Thompson Sampling in the Adaptive Linear Scalarized Multi Objective Multi Armed Bandit.
DOI: 10.5220/0005184400550065
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 55-65
ISBN: 978-989-758-074-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Thus, the total Pareto regret is the cumulativesumma-
tion of the Pareto regret over t time steps.
The Pareto front A
∗
can be found for example,
by using linear scalarized function (f) (Eichfelder,
2008). Linear scalarized function is simple and in-
tuitive. Given a predefined set weight w
w
w, the linear
scalarized function f weighs each value of the mean
vector of an arm i, converts the multi-objective space
to a single-objective one by summing the weighted
mean values and selects the optimal arm i
∗
that has
the maximum scalarized function. However, solving
a multi-objective optimization problem means find-
ing the Pareto front A
∗
. Thus, we need various lin-
ear scalarized functions F
F
F, each scalarized function
f
s
, f
s
∈ F
F
F, s = 1,·· · ,S has a corresponding set of
weight w
w
w
s
, to generate the variety of elements belong-
ing to the Pareto front. The predefined total weight
setW
W
W, W
W
W = {w
w
w
1
,· ·· ,w
w
w
S
} is uniformly random spread
sampling in the weighted space (Das and Dennis,
1997). However, there is no guarantee that the to-
tal weight set W
W
W can find all the optimal arms in the
Pareto front A
∗
. To improve the performance of the
linear scalarized function (S. Q. Yahyaa and Mander-
ick, 2014a) have used Knowledge Gradient (KG) pol-
icy (I. O. Ryzhov and Frazier, 2011) in the MOMAB
problem, resulting Linear Scalarized Knowledge Gra-
dient Function (LS-KG-F).
In this paper, we improve the performance of
the linear scalarized knowledge gradient function LS-
KG-F by introducing techniques from multi-objective
optimization that redefine the weights for the weight
set w
w
w. We either generate a new weight set w
w
w by
using genetic operators that change the weights di-
rectly (Drugan, 2013) or adapt the weights by using
the arms in the Pareto front like in (J. Dubois-Lacoste
and Stutzle, 2011). We propose also the Thompson
sampling policy (Thompson, 1933) to select from the
total weight set W
W
W, the weight set w
w
w that identifies a
larger set of optimal arms from the Pareto front A
∗
.
The rest of the paper is organized as follows:
In Section 2 we introduce the multi-objective multi-
armed bandit problem. In Section 3 we present the
linear scalarized functions and the scalarized multi-
objective bandits algorithm. In Section 4 we intro-
duce algorithms to determine the weight set, the stan-
dard, the adaptive and the genetic algorithms. In
Section 5 we introduce the adaptive scalarized multi-
objective bandits algorithm that uses Thompson sam-
pling policy to select the appropriate weight set. In
Section 6, we describe the experiments set up fol-
lowed by experimental results. Finally, we conclude
and discuss future work.
2 MULTI OBJECTIVE MULTI
ARMED BANDITS PROBLEM
Let us consider the MOMABs problems with |A| ≥ 2
arms and with independent D objectives per arm. At
each time step t, the agent selects one arm i and
receives a reward vector r
r
r
i
. The reward vector r
r
r
i
is drawn from a corresponding normal probability
distribution N(µ
µ
µ
i
,σ
σ
σ
2
i
) with unknown mean parameter
vector µ
µ
µ
i
, µ
µ
µ
i
= [µ
1
i
,· ·· ,µ
D
i
]
T
and unknown variance
parameter vector σ
σ
σ
2
i
, σ
σ
σ
2
i
= [σ
2,1
i
,· ·· ,σ
2,D
i
]
T
, where T
is the transpose. Thus, by drawing each arm i, the
agent maintains estimate of the mean parameter vec-
tor
ˆ
µ
µ
µ
i
and the variance
ˆ
σ
σ
σ
2
i
parameter vector, and com-
putes the number of times N
i
arm i is drawn. The
agent updates the estimated mean ˆµ
d
i
, the estimated
variance
ˆ
σ
2,d
i
of the selected arm i in each objective
d,d ∈ D and the number of times N
i
arm i has been
selected as follows (Powell, 2007):
N
i+1
= N
i
+ 1 (1)
ˆµ
d
i+1
= (1−
1
N
i+1
) ˆµ
d
i
+
1
N
i+1
r
d
t+1
(2)
ˆ
σ
2,d
i+1
=
N
i+1
− 2
N
i+1
− 1
ˆ
σ
2,d
i
+
1
N
i+1
(r
d
t+1
− ˆµ
d
i
)
2
(3)
where N
i+1
is the updated number of times arm i has
been selected, ˆµ
d
i+1
is the updated estimated mean,
and
ˆ
σ
2,d
i+1
is the updated estimated variance of the arm
i in the objective d and r
d
t+1
is the observed reward of
the arm i in the objective d.
When the objectives are conflicting with one an-
other then the mean component µ
d
i
of arm i corre-
sponding with objective d, d ∈ D, can be better than
the component µ
d
j
of another arm j but worse if we
compare the components for another objective d
′
:
µ
d
i
> µ
d
j
but µ
d
′
i
< µ
d
′
j
for objectives d and d
′
, respec-
tively. The agent has a set of optimal arms (Pareto
front) A
∗
which can be found by the Pareto dominance
relation (or Pareto partial order relation).
The Pareto dominance relation finds the Pareto
front A
∗
directly in the multi-objectiveMO space (Zit-
zler and et al., 2002). It uses the following relations
between the mean vectors of two arms. We use i and
j to refer to the mean vector (estimated mean vector
or true mean vector) of arms i and j, respectively:
Arm i dominates or is better than j, i ≻ j, if there
exists at least one objective d for which i
d
≻ j
d
and
for all other objectives d
′
we have i
d
′
j
d
′
. Arm i is
incomparable with j, i k j, if and only if there exists
at least one objective d for which i
d
≻ j
d
and there
exists another objective d
′
for which i
d
′
≺ j
d
′
. Arm i
is not dominated by j, j ⊁ i, if and only if there exists
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
56

at least one objective d for which j
d
≺ i
d
. This means
that either i ≻ j or i k j.
Using the above relations, Pareto front A
∗
,A
∗
⊂ A
be the set of arms that are not dominated by all other
arms. Moreover, the optimal arms in A
∗
are incompa-
rable with each other.
In the MOMAB, the agent has to find the Pareto
front A
∗
, therefore, the performance measure is the
Pareto regret (Drugan and Nowe, 2013). The Pareto
regret measure (R
Pareto
) measures the distance be-
tween a mean vector of an arm i that is pulled at
time step t and the Pareto front A
∗
. Pareto regret
R
Pareto
is calculated by finding firstly the virtual dis-
tance dis
∗
. The virtual distance dis
∗
is defined as
the minimum distance that is added to the mean
vector of the pulled arm µ
µ
µ
t
at time step t in each
objective to create a virtual mean vector µ
µ
µ
∗
t
, µ
µ
µ
∗
t
=
µ
µ
µ
t
+ ε
ε
ε
∗
that is incomparable with all the arms in
Pareto set A
∗
, i.e. µ
µ
µ
∗
t
||µ
µ
µ
i
∀
i∈A
∗
. Where ε
ε
ε
∗
is a vec-
tor, ε
ε
ε
∗
= [dis
∗,1
,· ·· ,dis
∗,D
]
T
. Then, the Pareto regret
R
Pareto
, R
Pareto
= dis(µ
µ
µ
t
,µ
µ
µ
∗
t
) = dis(ε
ε
ε
∗
,0
0
0) is the dis-
tance between the mean vector of the virtual arm µ
µ
µ
∗
t
and the mean vector of the pulled arm µ
µ
µ
t
at time step
t, where dis, dis(µ
µ
µ
t
,µ
µ
µ
∗
t
) = (
∑
D
d=1
(µ
∗,d
t
− µ
d
t
)
2
)
(1/2)
is
the Euclidean distance. Thus, the regret of the Pareto
front is 0 for optimal arms, i.e. the mean of the opti-
mal arm coincides itself.
3 THE SCALARIZED
MULTI-OBJECTIEVE BANDITS
Linear scalarization function converts the multi-
objective into single-objective optimization (Eich-
felder, 2008). However, solving a multi-objective op-
timization problem means finding the Pareto front A
∗
.
Thus, we need a set of scalarized functions F
F
F, F
F
F =
{ f
1
,· ·· , f
s
,· ·· , f
S
} to generate a variety of elements
belonging to the Pareto front A
∗
. Each scalarized
function f
s
, f
s
∈ F
F
F has a corresponding predefined
set of weight w
w
w
s
, w
w
w
s
∈ W
W
W, whereW
W
W = (w
w
w
1
,· ·· ,w
w
w
S
).
The linear scalarization function assigns to each
value of the mean vector of an arm i a weight w
d
and the result is the sum of these weighted mean
values. Given a predefined set of weights w
w
w
s
, w
w
w
s
=
(w
1
,· ·· ,w
D
) such that
∑
D
d=1
w
d
= 1, the linear scalar-
ized across mean vector is:
f
s
(µ
µ
µ
i
) = w
1
µ
1
i
+ ··· + w
D
µ
D
i
(4)
where f
s
(µ
µ
µ
i
) is a linear scalarized function s, s ∈ S
over the mean vector µ
µ
µ
i
of the arm i. After transform-
ing the multi-objective problem to a single-objective
problem, the linear scalarized function f
s
selects the
arm i
∗
f
s
that has the maximum linear scalarized func-
tion value:
i
∗
f
s
= argmax
1≤i≤A
f
s
(µ
µ
µ
i
)
The linear scalarization is very popular because of
its simplicity. However, it can not find all the optimal
arms in the Pareto front A
∗
(Das and Dennis, 1997).
To improve the performance of the linear scalar-
ized function, (S. Q. Yahyaa and Manderick, 2014b)
have extended Knowledge Gradient (KG) policy (I.
O. Ryzhov and Frazier, 2011) to the MOMAB prob-
lem, resulting linear scalarization function knowledge
gradient. (S. Q. Yahyaa and Manderick, 2014b) have
proposed two variants of linear scalarized KG, lin-
ear saclarized KG across arms (LS1-KG) and linear
saclarized KG across dimensions (LS2-KG). Since
LS1-KG performs better than LS2-KG, we will use
linear scalarized KG across arms LS1-KG.
The linear scalarized-KG across arms (LS1-
KG) converts the multi-objective estimated mean
ˆ
µ
µ
µ
i
,
ˆ
µ
µ
µ
i
= [ˆµ
1
i
,· ·· , ˆµ
D
i
]
T
and estimated variance
ˆ
σ
σ
σ
2
i
,
ˆ
σ
σ
σ
2
i
=
[
ˆ
σ
2,1
i
,· ·· ,
ˆ
σ
2,D
i
]
T
of each arm to one-objective, then
computes the corresponding bound (or term) ExpB
i
.
At each time step t, LS1-KG weighs both the esti-
mated mean vector
ˆ
µ
µ
µ
i
and estimated variance vector
ˆ
σ
σ
σ
2
i
of each arm i, converts the multi-objective vec-
tors to one-objective values by summing the elements
of each vector. Thus, we have one-objective multi-
armed bandits problem. The KG policy calculates
for each arm, a bound which depends on all avail-
able arms and selects the arm that has the maximum
estimated mean plus the bound. The LS1-KG is as
follows:
eµ
i
= f
s
(
ˆ
µ
µ
µ
i
) = w
1
ˆµ
1
i
+ ··· + w
D
ˆµ
D
i
∀
i
(5)
e
σ
2
i
= f
s
(
ˆ
σ
σ
σ
2
i
) = w
1
ˆ
σ
2,1
i
+ ··· + w
D
ˆ
σ
2,D
i
∀
i
(6)
e
¯
σ
2
i
=
e
σ
2
i
/N
i
∀
i
(7)
v
i
=
e
¯
σ
i
g
−|
eµ
i
− max
j6=i, j∈A
eµ
j
e
¯
σ
i
|
∀
i
(8)
where f
s
is a linear scalarization function that has a
predefined set of weight w
w
w
s
= (w
1
,· ·· ,w
D
), eµ
i
, and
e
σ
2
i
are the modified estimated mean, and the modi-
fied estimated variance of an arm i, respectively which
are one-objective values and
e
¯
σ
i
is the modified Root
Mean Square Error (RMSE) of an arm i. The v
i
is
the KG index of an arm i. The function g(ζ), g(ζ) =
ζΦ(ζ) + φ(ζ), where Φ, and φ are the cumulative
distribution, and the density of the standard normal
density N(0,1), respectively. Linear scalarized-KG
ThompsonSamplingintheAdaptiveLinearScalarizedMultiObjectiveMultiArmedBandit
57

across arms selects the optimal arm i
∗
LS
1
KG
according
to:
i
∗
LS
1
KG
= argmax
i=1,···,|A|
(eµ
i
+ ExpB
i
) (9)
= argmax
i=1,···,|A|
(eµ
i
+ (L− t) ∗ |A|D ∗ v
i
) (10)
where ExpB
i
is the bound of arm i, |A| is the number
of arms, D is the number of objectives, L is the hori-
zon of an experiments, i.e. length of trajectories and t
is the current time step.
The algorithm. The pseudocode of the Scalarized
Multi-objectieve Multi-Armed Bandit (SMOMAB)
algorithm is given in Figure 1. The linear scalarized-
KG across arms LS1-KG function is f. The scalar-
ized function set isF
F
F = ( f
1
,· ·· , f
S
), where each LS1-
KG function f
s
has a predefined weight set, w
w
w
s
=
(w
1,s
,· ·· ,w
D,s
) and the number of scalarized function
is |S|, |S| = D+ 1.
The algorithm in Figure 1 plays each arm for each
scalarized function s, Initial plays (step: 2)
1
. N
s
is the
number of times the scalarized function s is pulled and
N
s
i
is the number of times the arm i under the scalar-
ized function s is pulled. (r
r
r
i
)
s
is the reward of the
pulled arm i under the scalarized function s which is
drawn from a normal distribution N(µ
µ
µ,σ
σ
σ
2
r
), whereµ
µ
µ is
the unknown true mean vector and σ
σ
σ
2
r
is the unknown
true variance vector of the reward. (
ˆ
µ
µ
µ
i
)
s
and (
ˆ
σ
σ
σ
i
)
s
are the estimated mean and standard deviation vectors
of the arm i under the scalarized function s, respec-
tively. After initial playing, the algorithm chooses
uniformly at random one of the scalarized function
s (step: 4). The algorithm determines the correspond-
ing weight set w
w
w
s
such that
∑
D
d=1
w
d,s
= 1 (step: 5).
The weight set w
w
w
s
can be specified by using stan-
dard algorithm (Das and Dennis, 1997), adaptive al-
gorithm (J. Dubois-Lacoste and Stutzle, 2011), or ge-
netic algorithm (Drugan, 2013), we refer to Section 4
for more details. If the SMOMAB algorithm uses the
standard algorithm to set the weights, then the total
weight set W
W
W = (w
w
w
1
,· ·· ,w
w
w
S
) is fixed until the end of
playing L steps. However, if the SMOMAB algorithm
uses the adaptive or the genetic algorithm, then the
total weight setW
W
W = (w
w
w
1
,· ·· ,w
w
w
S
) will change at each
time step. The SMOMAB algorithm uses the prede-
fined total weight set W
W
W till the end of playing Initial
steps, then at each time step the adaptive and the ge-
netic algorithms generate new weights. The algorithm
selects the optimal arm (i
∗
)
s
that maximizes the LS1-
KG function (step: 6) and simulates the selected arm
(i
∗
)
s
to observe the reward vector (r
r
r
i
∗
)
s
(step: 7). The
1
We use s to refer the scalarized function f
s
that has a
predefined weight set w
w
w
s
= (w
1
,·· · ,w
d
,·· · , w
D
).
estimated mean vector (
ˆ
µ
µ
µ
i
∗
)
s
, estimated standard de-
viation vector (
ˆ
σ
σ
σ
i
∗
)
s
, and the number N
s
i
∗
of the se-
lected arm and the number of the pulled scalarized
function N
s
are updated (step: 8). Finally, the al-
gorithm computes the Pareto regret (step: 9). This
procedure is repeated until the end of playing L steps
which is the horizon of an experiment.
Note that, the algorithm in Figure 1 is an adapted
version of the scalarized MOMABs from (Drugan and
Nowe, 2013), but here the reward is drawn from nor-
mal distribution and the weight set w
w
w
s
is determined.
1.
Input:
Horizon of an experiment
L
;number
of arms
|A|
;number of objectives
D
;number of
scalarized functions
|S| = D+ 1
;reward vector
r
r
r ∼ N(µ
µ
µ,σ
σ
σ
2
r
)
.
2.
Initialize:
Total Weight set
W
W
W = (w
w
w
1
,· ··,w
w
w
D+1
)
For each scalarized function
s = 1
to
S
Play: each arm
i
,
Initial
steps
Observe:
(r
i
)
s
Update:
N
s
← N
s
+ 1
;
N
s
i
← N
s
i
+ 1
;
(ˆµ
i
)
s
;
(
ˆ
σ
i
)
s
End
3.
Repeat
4. Select a function
s
uniformly at random
5. Compute the weight set
w
s
← Weight
6. Select the optimal arm
(i
∗
)
s
that maximizes
the scalarized function
f
s
7. Observe: reward vector
(r
r
r
i
∗
)
s
,
(r
r
r
i
∗
)
s
= ([r
1
i
∗
,· ··, r
D
i
∗
]
T
)
s
8. Update:
(
ˆ
µ
µ
µ
i
∗
)
s
;
(
ˆ
σ
σ
σ
i
∗
)
s
;
N
s
i
∗
← N
s
i
∗
+ 1
;
N
s
← N
s
+ 1
9. Compute: Pareto regret
10.
Until L
11. Output: Pareto regret
Figure 1: The scalarized multi-objective multi-armed bandit
(SMOMAB) algorithm.
4 ADAPTIVE WEIGHTS FOR
THE SCALARIZED MOMAB
In this section, we provide different algorithms to
identify the weight set w
w
w
s
.
Fixed set of weights. The standard algo-
rithm (Das and Dennis, 1997) defines a fixed to-
tal weight set W
W
W, W
W
W = (w
w
w
1
,· ·· ,w
w
w
s
,· ·· ,w
w
w
S
) that is
uniformly random spread sampling in the weighted
space. For example, the bi-objective multi-armed
bandit with number of scalarized function |S|. The
weight w
1,s
of the scalarized function s in the objec-
tive d, d = 1 is set to 1−
s−1
|S|−1
and the weight w
2,s
of
the scalarized function s in the objective d, d = 2 is
set to 1− w
1,s
.
Note that, this algorithm performs a uniform sam-
pling in the weight space. However, there is no
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
58

guarantee that the resulting arms will give a uni-
form spread in the objective space. The weight set
w
w
w
s
, w
w
w
s
∈ W
W
W is sequentially ordered, therefore, when
the scalarized MOMAB algorithm (the algorithm in
Figure 1) is stopped prematurely, it will not have sam-
pled all the part of the weight space, possibly leaving
a part of the Pareto front A
∗
undiscovered.
Adaptive Direction. The adaptive algorithm from
(J. Dubois-Lacoste and Stutzle, 2011) takes into ac-
count the shape of the Pareto front A
∗
in order to
obtain a well-spread set of the non-dominated arms.
For a scalarized function s, this algorithm defines a
norm (Euclidean distance) to specify the largest gap
in the coverage of the Pareto front A
∗
. The largest gap
is the gap between the maximum norm max
i∈A
||
ˆ
µ
µ
µ
s
i
||
and the minimum norm min
i∈A
||
ˆ
µ
µ
µ
s
i
|| of the estimated
mean
ˆ
µ
µ
µ
s
i
of an arm i, i ∈ A under the scalarized func-
tion s. For example, the bi-objective multi-armed
bandit with scalarized function s. The adaptive new
weight w
1,s
of the objective d, d = 1 is perpendic-
ular to the segment defined by the maximum arm
i
max
, i
max
= argmax
i∈A
||
ˆ
µ
µ
µ
s
i
|| and the minimum arm
arm i
min
, i
min
= argmin
i∈A
||
ˆ
µ
µ
µ
s
i
|| in the objective space,
that is:
w
1,s
=
ˆµ
2,s
i
max
− ˆµ
2,s
i
min
ˆµ
2,s
i
max
− ˆµ
2,s
i
min
+ ˆµ
1,s
i
min
− ˆµ
1,s
i
max
where ˆµ
2,s
i
max
and ˆµ
2,s
i
min
are the estimated mean of the
arms i
max
and i
min
in the objective 2 under scalarized
function s, respectively . And, ˆµ
1,s
i
max
and ˆµ
1,s
i
min
are the
estimated mean of the arms i
max
and i
min
in the objec-
tive 1 under scalarized function s, respectively. The
new weight w
2,s
of the second objective d = 2 un-
der scalarized function s is set to 1 − w
1,s
. Note that,
for number of objectives D > 2, the weight w
1
in the
objective d = 1 is calculated by using the estimated
mean of the objectives d = 1 and d = 2. The weight
w
2
in the objective d = 2 is calculated by using the es-
timated mean of the objectives d = 2 and d = 3, and
so on. While the weight w
D
in the objective D is set
to 1− (w
1
+ ··· + w
D−1
).
This algorithm defines new weights based on the
shape of the Pareto front. Therefore, if the shape of
the Pareto front is irregular, then the new weight will
not discover all the optimal arms in the Pareto front.
This operator adapt the weights of only two objectives
at the time.
Genetic Operators. The scalarized local search al-
gorithm (Drugan, 2013) generates new weights for
scalarized function s using real-coded genetic oper-
ators. The new weights are different from the parent-
ing weights, therefore, it could explore the parts of the
Pareto front A
∗
that are undiscovered.
The mutation operator, mutates each weight of a
scalarization function independently using a normal
distribution. The recombination operator generates a
new weight w
w
w from two or more scalarized functions,
each scalarized function has a predefined weight set
w
w
w
s
= (w
1
,· ·· ,w
D
). The translation recombination
operator translates the main set of scalarized function
S with a normally distributed variable. The rotation
recombination operator, considers that the scalarized
functions S are positioned on a S-dimensional hyper-
sphere. The generated new scalarized function s also
belongs to this hypersphere around the main scalar-
ized functions S, that is rotated with a small normally
distributed angle. For more details, we refer to (Dru-
gan and Thierens, 2010).
Since the mutation operator is the easiest one to
implement, we will use it in our comparison. Given
the weight setw
w
w
s
(t) of the scalarized function s at time
step t, the mutated new set of weight w
w
w
s
(t + 1) at time
step t + 1 is calculated as follows;
w
w
w
s
(t + 1) = w
w
w
s
(t) + I
I
I1
1
1
where I
I
I is a diagonal matrix of size D × D with nor-
mally distributed variables and 1
1
1 is a vector of size
D with 1 variables. After calculating the new weight
set w
w
w
s
(t + 1), we can either replace the old weight set
w
w
w
s
(t) with the new weight set, i.e. w
w
w
s
(t) ← w
w
w
s
(t + 1)
(mutation) or at each time step t, we generate new set
of weight that is independent from the previous one
(mutation without replacement).
5 THOMPSON SAMPLING IN
THE SCALARIZED MOMAB
ALGORITHM
In this section, we design an algorithm that frequently
selects the appropriated scalarized function set of
weights w
w
w
s
, w
w
w
s
∈ W
W
W, where the total weight set W
W
W is
either determined by using standard algorithm, adap-
tive algorithm or genetic algorithm. The appropriate
scalarized function is the one that improves the per-
formance of the algorithm by identifying new Pareto
optimal arms.
In the Bernoulli one-objective,Multi-Armed Ban-
dits (MABs), the reward is a stochastic scalar value,
and there is only one optimal arm. The reward r
i
, r
i
∼
B(p
i
) for an arm i is either 0, or 1 and generated from
a Bernoulli distribution B with unknown probability
of success p
i
. The goal of an agent is to minimize the
loss of not pulling the best arm i
∗
over L time steps.
The loss (or the total regret) is R
L
= Lp
∗
−
∑
L
t=1
p
i
(t),
where p
∗
= max
i=1,···,A
p
i
is the probability of suc-
ThompsonSamplingintheAdaptiveLinearScalarizedMultiObjectiveMultiArmedBandit
59

cess of the best arm i
∗
, and p
i
is the probability of
success of the selected arm i at time step t. To mini-
mize the total regret, at each time step t, the agent has
to trade-off between selecting the optimal arm i
∗
(ex-
ploitation) to minimize the regret
2
and selecting one
of the non-optimal arm i to increase the confidence in
the estimated probability of success ˆp
i
, ˆp
i
=
α
i
/(α
i
+ β
i
)
of the arm i (exploration). Where α
i
is the number of
successes (the number of receiving reward equals 1)
and β
i
is the number of failures (the number of receiv-
ing reward equals 0) of the arm i.
Thompson Sampling Policy. (Thompson, 1933) as-
signs to each arm i, i ∈ A a random probability of
selection P
i
to trade-off between exploration and ex-
ploitation. The random probability of selection P
i
of
each arm i is generated from Beta distribution, i.e.
P
i
= Beta(α
i
,β
i
), where α
i
is the number of successes
and β
i
is the number of failures of the arm i. The ran-
dom probability of selection P
i
of an arm i depends
on the performance of the arm i, i.e. the unknown
probability of success p
i
of the arm i. It will be high
value if the arm i has high probability of success p
i
value. With Bayesian priors on the Bernoulli proba-
bility of success p
i
of each arm i, Thompson sampling
assumes initially the number of successes, α
i
and the
number of failures, β
i
for each arm i is 1. At each
time t, Thompson sampling samples the probability
of selection P
i
for each arm i, i ∈ A (the probability
that an arm i is optimal) from Beta distribution, i.e.
P
i
= Beta(α
i
,β
i
). Beta distribution generates random
values, therefore, probably, at time step t, the optimal
arm i
∗
, i
∗
= argmax
i∈A
p
i
has high probability of se-
lection P
i
∗
, while at time step t +1 the suboptimal arm
j, j ∈ A, j 6= i
∗
has high probability of selection P
j
.
Thompson sampling selects the optimal arm i
∗
TS
that has the maximum probability of selection P
i
∗
TS
,
i.e. i
∗
TS
= argmax
i∈A
P
i
and observes the reward r
i
∗
TS
.
If r
i
∗
TS
= 1, then Thompson sampling updates the num-
ber of successes α
i
∗
TS
= α
i
∗
TS
+ 1 for the arm i
∗
TS
. As
a result, the estimated probability of success ˆp
i
∗
TS
of
the arm i
∗
TS
will increase. If r
i
∗
TS
= 0, then Thomp-
son sampling updated the number of failures β
i
∗
TS
=
β
i
∗
TS
+1 for the arm i
∗
. As a result, the estimated prob-
ability of success ˆp
i
∗
TS
of the arm i
∗
TS
will decrease.
Since, Thompson sampling is very easy to imple-
ment, we will use it to select the scalarized function
s, s ∈ S. We assume that each scalarized function s
has unknown probability of success p
s
and when we
select s, we either receive reward 1 or 0. We call
the algorithm that uses Thompson sampling to select
the weight set ”Adaptive Scalarized Multi-Objective
Multi-Armed Bandit” (adaptive-SMOMAB). Note
2
At each time step t, the regret equals p
∗
− p
i
(t).
that, adaptive-SMOMAB uses Thompson sampling to
select the weight set, while scalarized multi-objective
multi-armed bandit (MOMAB) selects uniformly at
random one of the weight set w
w
w
s
, w
w
w
s
∈ W
W
W.
The Adaptive-SMOMAB Algorithm. As in the case
of MABs, Thompson sampling uses random of beta
distribution Beta(α
s
,β
s
) to assign a probability of se-
lection P
s
for each scalarized function s. Where α
s
is the number of successes of the scalarized function
s and β
s
is the number of failures of the scalarized
function s. We consider that each scalarized func-
tion s has unknown probability of success p
s
and by
playing each scalarized function s, we can estimate
the corresponding probability of success. At each
time step t, we maintain value V
s
(t) for each scalar-
ized function s, where V
s
(t) = max
i∈A
f
s
((
ˆ
µ
µ
µ
i
)
s
) is the
value of the optimal arm i
∗
, i
∗
= argmax
i∈A
f
s
((
ˆ
µ
µ
µ
i
)
s
)
under scalarized function s and (
ˆ
µ
µ
µ
i
)
s
is the estimated
mean vector of the arm i under the scalarized func-
tion s. If we select the scalarized function s at time
step t and the value of this scalarized function V
s
(t) is
greater or equal than the value at the previous selec-
tion, V
s
(t) ≥ V
s
(t − 1), then this scalarized function s
performs well because it has the ability to select the
same optimal arm or to select another optimal arm
that has higher value. Otherwise, the scalarized func-
tion s does not perform well.
The pseudocode of the adaptive-SMOMAB algorithm
is given in Figure 2. The linear scalarized-KG across
arms LS1-KG function f is used to convert the multi-
objective to a single one. The number of scalarized
function is |S|, |S| = D + 1, where D is the number
of objectives. The horizon of an experiment is L
steps. The algorithm in Figure 2 plays each arm for
each scalarized function s, Initial plays. The scalar-
ized function set is F
F
F = ( f
1
,· ·· , f
|S|
), each scalarized
function s has a corresponding predefined weight set,
w
w
w
s
= (w
1,s
,· ·· ,w
D,s
). N
s
is the number of times the
scalarized function s is pulled and N
s
i
is the number
of times the arm i under the scalarized function s is
pulled. (r
r
r
i
)
s
is the reward vector of the pulled arm i
under the scalarized function s which is drawn from a
normal distribution N(µ
µ
µ,σ
σ
σ
2
r
), whereµ
µ
µ is the true mean
vector andσ
σ
σ
2
r
is the true variance vector of the reward.
(
ˆ
µ
µ
µ
i
)
s
and (
ˆ
σ
σ
σ
i
)
s
are the estimated mean and standard
deviation vectors of the arm i under the scalarized
function s, respectively. V
s
, V
s
= max
i∈A
f
s
((
ˆ
µ
µ
µ
i
)
s
) is
the value of each scalarized function s after playing
each arm i Initial steps, where f
s
((
ˆ
µ
µ
µ
i
)
s
) is the value
of the LS-KG for the arm i under scalarized function
s. The number of successes α
s
, and the number of
failures β
s
for each scalarized function s are set to 1
as (Thompson, 1933), therefore, the estimated proba-
bility ˆp
s
, ˆp
s
=
α
s
/(α
s
+ β
s
) of success is 0.5. The prob-
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
60

1.
Input:
Horizon of an experiment
L
;number
of arms
|A|
;number of objectives
D
;number of
scalarized functions
|S| = D+ 1
;reward vector
r
r
r ∼ N(µ
µ
µ,σ
σ
σ
2
r
)
.
2.
Initialize:
Total wight set
W
W
W = (w
w
w
1
,· ··,w
w
w
D+1
)
For each scalarized function
s = 1
to
|S|
Play: each arm
i
,
Initial
steps
Observe:
(r
r
r
i
)
s
Update:
N
s
← N
s
+ 1
;
N
s
i
← N
s
i
+ 1
(
ˆ
µ
µ
µ
i
)
s
;
(
ˆ
σ
σ
σ
i
)
s
Compute:
V
s
(t) = max
1≤ i≤ A
f
s
((ˆµ
ˆµ
ˆµ
i
)
s
)
Set:
α
s
= 1
;
β
s
= 1
;
ˆp
s
= 0.5
;
P
s
=
1
|S|
End
3.
Repeat
4. For each scalarized function
s = 1,· ··, S
5. Sample
P
s
from Beta
(α
s
,β
s
)
6. End for
7.
s
∗
= argmax
s
P
s
8. Compute: the new weight set
w
w
w
s
∗
← Weight
9. Select: the optimal arm
i
∗
that maximizes
scalarized function
f
s
∗
that has
the new weight set
w
w
w
s
∗
10. Compute:
V
s
∗
(t) = max
1≤ i≤ A
f
s
∗
((ˆµ
ˆµ
ˆµ
i
)
s
∗
)
11. If
V
s
∗
(t) ≥ V
s
∗
(t −1)
12.
α
s
∗
= α
s
∗
+ 1
13. Else
14.
β
s
∗
= β
s
∗
+ 1
15. End
16.
V
s
∗
(t −1) ← V
s
∗
(t)
17. Observe: reward vector
(r
r
r
i
∗
)
s
∗
= ([r
1
i
∗
,· ··, r
D
i
∗
]
T
)
s
∗
18. Update:
(
ˆ
µ
µ
µ
i
∗
)
s
∗
;
(
ˆ
σ
σ
σ
i
∗
)
s
∗
;
N
s
∗
i
∗
← N
s
∗
i
∗
+ 1
;
N
s
∗
← N
s
∗
+ 1
19. Compute: Pareto regret
20.
Until L
21.
Output:
Pareto regret
Figure 2: Adaptive Scalarized MOMAB.
ability of selection P
s
each scalarized function s is
1
|S|
(step: 2).
After initial playing, the algorithm computes the
probability of selection P
s
of each scalarized function
s, the probability of selection P
s
is sampled from beta
distribution Beta(α
s
,β
s
)(step: 4). The algorithm se-
lects the optimal scalarized function s
∗
, the one that
has a max probability of success (step: 7). The al-
gorithm determines the weight set w
w
w
s
∗
for the optimal
scalarized function s
∗
(step: 8). The weight set w
w
w
s
∗
is determined either by using adaptive algorithm, ge-
netic algorithm or standard algorithm, Section 4. The
algorithm selects the optimal arm i
∗
under the optimal
scalarized function s (step: 9) and computes the value
of the optimal scalarized function s
∗
(step: 10) which
is the value of the optimal arm i
∗
. If the value V
s
∗
(t)
of the optimal scalarized function s
∗
at time step t, is
greater or equal than the value of the of the optimal
scalarized function s
∗
at time step t − 1, then the opti-
mal scalarized function s
∗
performs well. The number
of successes α
s
∗
is increased. Other wise, the number
of failures β
s
∗
is increased (steps: 11-15). Then, the
algorithm updates the value V
s
∗
of the optimal scalar-
ized function s
∗
(step: 16). The algorithm simulates
the optimal arm i
∗
of the optimal scalarized function
s
∗
, observes the corresponding reward vector (r
r
r
i
∗
)
s
∗
and updates the estimated mean vector (ˆµ
ˆµ
ˆµ
i
∗
)
s
∗
, the es-
timated standard deviation vector (
ˆ
σ
ˆ
σ
ˆ
σ
i
∗
)
s
∗
of the arm
i
∗
and updates the number N
s
∗
i
∗
of the selected arm
and the number of the pulled scalarized function N
s
∗
(steps: 17-18). Finally, the algorithm computes the
Pareto regret (step: 19). This procedure is repeated
until the end of playing L steps.
Note that, if the adaptive-SMOMAB algorithm
uses the standard algorithm to set the weights, then
the total weight set W
W
W = (w
w
w
1
,· ·· ,w
w
w
S
) is fixed un-
til the end of playing L steps. However, if the
adaptive-SMOMAB algorithm uses the adaptive or
the genetic algorithm, then the total weight set W
W
W =
(w
w
w
1
,· ·· ,w
w
w
S
) will change at each time step. The
adaptive-SMOMAB algorithm uses a predefined to-
tal weight set W
W
W till the end of playing Initial steps,
then at each time step the adaptive and the genetic al-
gorithms generate new weights.
6 EXPERIMENTS
In this section, we firstly compare the performance of
the adaptive scalarized multi-objective, multi-armed
bandit (adaptive-SMOMAB)algorithm, the algorithm
in Figure 2 and the performance of the scalarized
multi-objective multi-armed bandit (SMOMAB) al-
gorithm, the algorithm in Figure 1. We use the
genetic, the adaptive, and the standard algorithms,
Section 4 to set the weight set w
w
w
s
for each linear
scalarized knowledge gradient across arms (LS1-KG)
s. Secondly, we experimentally compare the stan-
dard, the adaptive and the genetic algorithms, using
the adaptive-SMOMAB algorithm. The performance
measures are:
1. The Pareto regret, Section 2 at each time step t
which is the average of M experiments.
2. The cumulative Pareto regret, Section 2 at each
time step t which is the average of M experiments.
The number of experiments M is 1000. The hori-
zon of each experiment L is 1000. The reward vectors
r
r
r
i
of each arm i are drawn from corresponding normal
distribution N(µ
µ
µ
i
,σ
σ
σ
2
i,r
) where µ
µ
µ
i
= [µ
1
i
,· ·· ,µ
D
i
]
T
is the
true mean vector and σ
σ
σ
i,r
= [σ
1
i,r
,· ·· ,σ
D
i,r
]
T
is the true
ThompsonSamplingintheAdaptiveLinearScalarizedMultiObjectiveMultiArmedBandit
61

standard deviation vector of the reward of the arm i.
The true means and the true standard deviations of
arms are unknown parameters to the agent. The LS1-
KG needs the estimated variance
ˆ
σ
σ
σ
2
i
for each arm i,
therefore, each arm is played initially 2 times which
is the minimum number to estimate the variance.
At each time step t, the mutation operator mu-
tates the weight set w
w
w
s
(t) of each scalarized function
s at time step t independently using a normal distri-
bution N(µ, σ
2
) to generate new weight set w
w
w
s
(t + 1),
we set the mean µ to 0 and the variance σ
2
to 0.05
as (Drugan, 2013). We can either replace the old
weight w
w
w
s
(t) set with the new weight set w
w
w
s
(t + 1),
i.e. w
w
w
s
(t) ← w
w
w
s
(t + 1) or at each time step t, we gen-
erate new set of weight that is independent from the
previous one. We compare the two different setting
and we find out that the replacement setting performs
better, therefore, we use this in our comparison.
6.1 Bi-Objective
Example 1. We used the same example in (Dru-
gan and Nowe, 2013) because it simple to understand
and contains non-convex mean vector set. The num-
ber of arms |A| equals 6, the number of objectives D
equals 2. The standard deviation for arms in each
objective is 0.1. The true mean set vector is (µ
µ
µ
1
=
[0.55, 0.5]
T
, µ
µ
µ
2
= [0.53,0.51]
T
, µ
µ
µ
3
= [0.52,0.54]
T
,
µ
µ
µ
4
= [0.5,0.57]
T
, µ
µ
µ
5
= [0.51,0.51]
T
, µ
µ
µ
6
= [0.5, 0.5]
T
).
Note that, the Pareto front is A
∗
= (a
∗
1
,a
∗
2
,a
∗
3
,a
∗
4
),
where a
∗
i
refers to the optimal arm i
∗
. The subopti-
mal a
5
is not dominated by the two optimal arms a
∗
1
and a
∗
4
, but a
∗
2
and a
∗
3
dominates a
5
while a
6
is domi-
nated by all the other mean vectors. Figure 3 shows a
set of 2-objective true mean with a non-convex set.
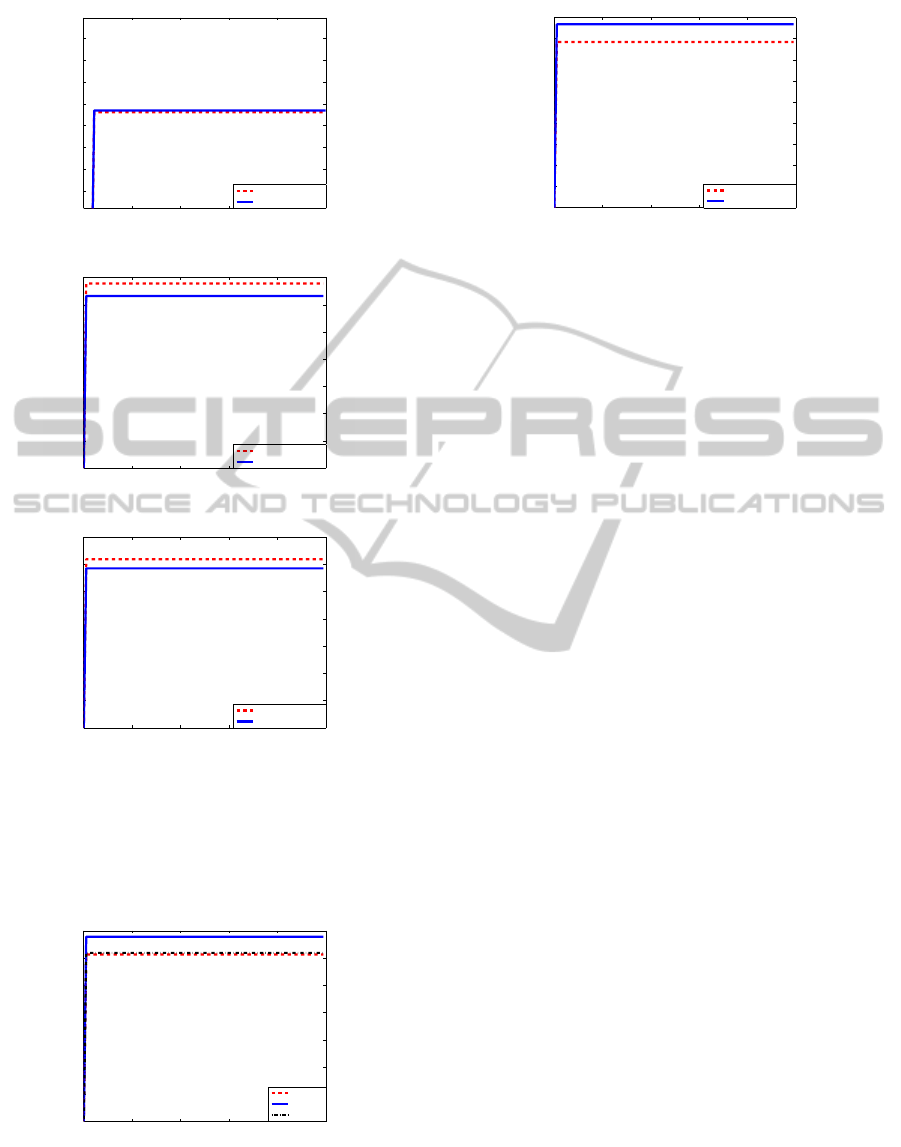
First, we compare the performance of the
SMOMAB and adaptive-SMOMAB algorithms. We
use either the standard algorithm, the adaptive algo-
rithm, or the genetic algorithm to set the weights.
Figure 4 gives the comparison of the SMOMAB and
adaptive-SMOMAB algorithms using the standard,
the adaptive, and the genetic algorithms. The stan-
dard deviation σ
d
i,r
of reward for each arm i in each
objective d is set to 0.1. The x-axis gives the time
step. The y-axis is the cumulative Pareto regret which
is the average of M experiments at each time step t.
Figure 4 shows that the SMOMAB algorithm per-
forms better than the adaptive-SMOMAB algorithm
using the adaptive, and the genetic algorithms, since
the cumulative Pareto regret is decreased. While, the
adaptive-SMOMAB algorithm performs slightly bet-
ter than the SMOMAB algorithm using the standard
algorithm.
Second, we compare the performance of the stan-
0.5 0.51 0.52 0.53 0.54 0.55 0.56 0.57
0.5
0.51
0.52
0.53
0.54
0.55
0.56
0.57
0.58
Objective
1
Objective
2
mean of optimal arm
mean of non optimal arm
µ
1
*
µ
2
*
µ
3
*
µ
4
*
µ
5
µ
6
0.49 0.5 0.51 0.52 0.53 0.54 0.55 0.56 0.57
0.49
0.5
0.51
0.52
0.53
0.54
0.55
0.56
0.57
0.58
Objective
1
Objective
2
mean of optimal arm
mean of non optimal arm
µ
10
*
µ
1
*
µ
2
*
µ
3
*
µ
5
*
µ
6
*
µ
4
*
µ
7
*
µ
8
*
µ
9
*
µ
13
µ
15
µ
16
µ
20
µ
19
µ
18
µ
12
µ
11
µ
14
µ
17
Figure 3: Non-convex and convex mean vector sets with
bi-objective. Upper figure shows a non-convex set with 6-
armed. Lower figure shows a convex set with 20-armed.
dard, the adaptive, and the genetic algorithms using
the adaptive-SMOMAB algorithm. Figure 5 gives the
cumulative Pareto regret. The x-axis is the time step.
The y-axis is the cumulative Pareto regret which is the
average of M experiments at each time step t. Figure 5
shows that the standard algorithm is the best algo-
rithm and the adaptivealgorithm is the worst one. The
mutation algorithm performs better than the adaptive
algorithm and slightly worse than the standard algo-
rithm.
In Example 1, the Pareto front A
∗
contains optimal
arms that are far from the non-optimal arms accord-
ing to the Euclidean distance and the number of the
optimal arms |A
∗
|, |A
∗
| = 4 is larger than the number
of the non-optimal arms which is equal 2. Therefore,
the SMOMAB algorithm almost performs better than
the adaptive-SMOMAB because it selects uniformly
at random one of the scalarized function. And, the
standard algorithm performs better than the adaptive
and the genetic algorithms because they generate new
weights that are nearest to each other to explore more
the optimal arms.
6.2 Triple-Objective
Example 2. With number of objectives D equals
2, number of arms |A| equals 20 and convex
Pareto mean set, (µ
µ
µ
1
= [.56,.491]
T
,µ
µ
µ
2
= [.55,
.51]
T
,µ
µ
µ
3
= [.54,.527]
T
,µ
µ
µ
4
= [.535, .535]
T
,µ
µ
µ
5
=
[.525, .555]
T
,µ
µ
µ
6
= [.523, .557]
T
,µ
µ
µ
7
= [.515, .56]
T
,
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
62
0 50 100 150 200 250
5.4
5.6
5.8
6
6.2
6.4
6.6
6.8
x 10
−3
Time step
Cumulative Pareto Regret
adaptive−SMOMAB
SMOMAB
a. Using the standard algorithm
0 200 400 600 800 1000
0
1
2
3
4
5
6
7
x 10
−3
Time step
Cumulative Pareto Regret
adaptive−SMOMAB
SMOMAB
b. Using the adaptive algorithm
0 200 400 600 800 1000
0
1
2
3
4
5
6
7
x 10
−3
Time step
Cumulative Pareto Regret
adaptive−SMOMAB
SMOMAB
c. Using the genetic algorithm
Figure 4: Performance comparison of the SMOMAB
algorithm with the adaptive-SMOMAB algorithm on 2-
objective, 6-armed problem. The weights are set using the
standard algorithm in figure a, using the adaptive algorithm
in figure b, and using the genetic algorithm in figure c.
0 200 400 600 800 1000
0
1
2
3
4
5
6
7
x 10
−3
Time step
Cumulative Pareto Regret
Standard
Adaptive
Mutation
Figure 5: Performance comparison of the standard, the
adaptive, and the genetic algorithms on 2-objective, 6-
armed problem using the adaptive-SMOMAB algorithm.
0 200 400 600 800 1000
0
1
2
3
4
5
6
7
8
9
x 10
−3
Time step
Cumulative Pareto Regret
adaptive−SMOMAB
SMOMAB
a. Using the adaptive algorithm
Figure 6: Performance comparison of the SMOMAB
algorithm with the adaptive-SMOMAB algorithm on 3-
objective, 20-armed problem. The weights are set using the
adaptive algorithm.
µ
µ
µ
8
= [.505,.567]
T
,µ
µ
µ
9
= [.5, .57]
T
,µ
µ
µ
10
= [.497,
.572]
T
,µ
µ
µ
11
= [.498,.567]
T
,µ
µ
µ
12
= [.501,.56]
T
,µ
µ
µ
13
=
[.505, .495]
T
,µ
µ
µ
14
= [.508, .555]
T
,µ
µ
µ
15
= [.51,.52]
T
,
µ
µ
µ
16
= [.515,.525]
T
,µ
µ
µ
17
= [.52,.55]
T
,µ
µ
µ
18
=
[.53,.53]
T
,µ
µ
µ
19
= [.54,.52]
T
,µ
µ
µ
20
= [.54,.51]
T
),
the standard deviation for arms in each objective is
set to 0.1. The Pareto front A
∗
contains 10 optimal
arms, A
∗
= (a
∗
1
,a
∗
2
,a
∗
3
,a
∗
4
,a
∗
5
,a
∗
6
,a
∗
7
,a
∗
8
,a
∗
9
,a
∗
10
) (S.
Q. Yahyaa and Manderick, 2014c). Note that, the
number of the optimal arms |A
∗
|, |A
∗
| = 10 is equal
to the number of non-optimal arms and the optimal
arms are close to the non-optimal arm according
to the Euclidean distance. Figure 3 shows a set of
2-objective convex true mean vector set. We add
extra objective to Example 2, resulting in 3-objective,
20-armed bandit problem. The Pareto front A
∗
still
contains 10 optimal arms and the optimal arms are
closer to non-optimal arms compared to Example 2
according to the Euclidean distance.
First, we compare the performance of the
SMOMAB and adaptive-SMOMAB algorithms. We
use either the standard algorithm, the adaptive al-
gorithm, or the genetic algorithm to determine the
weight set. The adaptive-SMOMAB algorithm per-
forms better than the SMOMAB algorithm for the
standard, adaptive and genetic algorithms. Figure 6
gives the comparison of the SMOMAB and adaptive-
SMOMAB algorithms using the adaptive algorithm.
Figure 6 shows that the adaptive-SMOMAB algo-
rithm performs better than the SMOMAB algorithm
using the adaptive algorithm to set the weight set.
Second, we compare the performance of the stan-
dard, the adaptive, and the genetic algorithms using
the adaptive-SMOMAB algorithm. Figure 7 gives
the cumulative Pareto regret. Figure 7 shows that the
standard algorithm is the worst algorithm. The adap-
tive algorithm is the best one and performs slightly
better than the mutation algorithm. The mutation al-
ThompsonSamplingintheAdaptiveLinearScalarizedMultiObjectiveMultiArmedBandit
63

0 100 200 300 400 500
4.5
5
5.5
6
6.5
7
7.5
8
8.5
9
x 10
−3
Time step
Cumulative Pareto Regret
Standard
Adaptive
Mutation
Figure 7: Performance comparison of the standard, the
adaptive, and the genetic algorithms on 3-objective, 20-
armed problem using the adaptive-SMOMAB algorithm.
gorithm performs better than the standard algorithm
and worse than the adaptive algorithm.
From the above experiment, we see that when
we increase the number of objectives, the adaptive-
SMOMAB algorithm performs better than the
SMOMAB algorithm. Also, we see that the adap-
tive and the genetic algorithms perform better than the
standard algorithm.
6.3 5-Objective
We add extra 2 objectives to Example 2, resulting
in 5-objective, 20-armed bandit problem, leaving the
Pareto front A
∗
unchanged. The optimal arms in the
Pareto front A
∗
are still closer to the non-optimal arms
according to the Euclidean distance. The standard de-
viation for arms in each objective is set to 0.01.
First, we compare the performance of the
SMOMAB and adaptive-SMOMAB algorithms. We
use either the standard algorithm, the adaptive algo-
rithm, or the genetic algorithm to set the weights. The
adaptive-SMOMAB algorithm performs better than
the SMOMAB algorithm for all the weight setting.
Figure 8 gives the comparison of the SMOMAB and
adaptive-SMOMAB algorithms using the standard al-
gorithm. Figure 8 shows that the adaptive-SMOMAB
algorithm performs better than the SMOMAB algo-
rithm using the standard algorithm.
Second, we compare the performance of the stan-
dard, the adaptive, and the genetic algorithms using
the adaptive-SMOMAB algorithm. Figure 9 gives
the cumulative Pareto regret. Figure 9 shows that the
standard algorithm is the worst algorithm and the mu-
tation algorithm is the best algorithm. The adaptive
algorithm performs better than the standard algorithm
and worse than the mutation algorithm.
From the above experiment, we see that when we
increase the number of objectives, i.e. D > 3 the per-
formance of the adaptive-SMOMAB algorithm is in-
creased. We also see the performance of the genetic
0 200 400 600 800 1000
0
1
2
3
4
5
6
7
8
9
x 10
−3
Time step
Cumulative Pareto Regret
adaptive−SMOMAB
SMOMAB
a. Using the adaptive algorithm
Figure 8: Performance comparison of the SMOMAB
algorithm with the adaptive-SMOMAB algorithm on 5-
objective, 20-armed problem. The weights are set using the
adaptive algorithm.
0 200 400 600 800 1000
0
1
2
3
4
5
6
7
8
x 10
−3
Time step
Cumulative Pareto Regret
Standard
Adaptive
Mutation
Figure 9: Performance comparison of the standard, the
adaptive, and the genetic algorithms on 5-objective, 20-
armed problem using the adaptive-SMOMAB algorithm.
and adaptive algorithms are increased, where the cu-
mulative Pareto regret is decreased.
Discussion. from the above experiments, we see
that with minimum number of objectives D, D = 2,
the SMOMAB algorithm performs better than the
adaptive-SMOMAB algorithm. While, for number of
objectives D, D > 2 larger than 2, the performance
of the adaptive-SMOMAB algorithm is better than
the performance of the SMOMAB algorithm. As the
number of objectives is increased, the performance of
the adaptive-SMOMAB algorithm increases. We also
see that, for small number of objectives D, D = 2,
the standard algorithm performs better than the adap-
tive and the genetic algorithms using the adaptive-
SMOMAB algorithm. While as the number of ob-
jectives is increased, the adaptive and genetic algo-
rithms perform better than the standard algorithm us-
ing the adaptive-SMOMAB algorithm. Where, the
adaptive algorithm performs better than the genetic
algorithm for number of objectives equals 3 and the
genetic algorithm performs better than the adaptive
algorithm for number of objectives equals 5. The in-
tuition is that for small number of objectives D, D = 2
and small number of arms |A|, |A| = 6, the small num-
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
64

ber of scalarized functions S, |S| = D+ 1 was able to
identify almost all the optimal arm in the Pareto front
A
∗
. While, for large number of objectives D, D ≥ 2
and large number of arms |A|, |A| = 20, the adaptive
and genetic algorithms generate new weights, and the
new weights explore all the optimal arms in the Pareto
front A
∗
. We also see that the figures have a flat per-
formance and this is because of the calculation of the
Pareto regret. Pareto regret adds minimum distance
(virtual distance) to the selected suboptimal arm to
create an optimal arm, therefore the added distance
will be the same if the suboptimal arms are close to
each other.
7 CONCLUSIONS
We presented multi-objective, multi-armed bandit
(MOMAB) problem and the regret measures in the
MOMAB. We presented the linear scalarized function
and the linear scalarized-KG that transform the multi-
objective problem into a single problem by summing
the weighted objectivesto find the optimal arms. Usu-
ally, the scalarized multi-objective (SMOMAB) algo-
rithm selects uniformly at random the scalarized func-
tion s. We proposed to use techniques from the multi-
objective optimization in the SMOMAB algorithm to
adapt the weights online. We use the genetic opera-
tors to generate new weights in the proximity of the
current weight sets, and we adapt the weights to be
perpendicular on the set of Pareto optimal solutions.
We propose the adaptive scalarized multi-armed ban-
dit (adaptive-SMOMAB) algorithm that uses Thomp-
son sampling policy to select the scalarized s. We
experimentally compared the SMOMAB algorithm
and the adaptive-SMOMAB algorithm using the pro-
posed algorithms: the fixed weights, the adaptive
weights, and the genetic weights. We conclude that
when the number of objective D is increased D >
2, the adaptive-SMOMAB performs better than the
SMOMAB algorithm. The adaptive and the mutation
algorithms perform better than the standard algorithm
(fixed weights).
REFERENCES
Das, I. and Dennis, J. E. (1997). A closer look at drawbacks
of minimizing weighted sums of objectives for pareto
set generation in multicriteria optimization problems.
Structural Optimization, 14(1):63–69.
Drugan, M. (2013). Sets of interacting scalarization func-
tions in local search for multi-objective combinatorial
optimization problems. In IEEE Symposium Series on
Computational Intelligence (IEEE SSCI).
Drugan, M. and Nowe, A. (2013). Designing multi-
objective multi-armed bandits algorithms: A study. In
Proceedings of the International Joint Conference on
Neural Networks (IJCNN).
Drugan, M. and Thierens, D. (2010). Geometrical recombi-
nation operators for real-coded evolutionary mcmcs.
Evolutionary Computation, 18(2):157–198.
Eichfelder, G. (2008). Adaptive Scalarization Methods in
Multiobjective Optimization. Springer-Verlag Berlin
Heidelberg, 1st edition.
I. O. Ryzhov, W. P. and Frazier, P. (2011). The knowledge-
gradient policy for a general class of online learning
problems. Operation Research.
J. Dubois-Lacoste, M. L.-I. and Stutzle, T. (2011). Improv-
ing the anytime behavior of two-phase local search. In
Annals of Mathematics and Artificial Intelligence.
Powell, W. B. (2007). Approximate Dynamic Program-
ming: Solving the Curses of Dimensionality. John
Wiley and Sons, New York, USA, 1st edition.
S. Q. Yahyaa, M. D. and Manderick, B. (2014a). Empir-
ical exploration vs exploitation study in the scalar-
ized multi-objective multi-armed bandit problem. In
International Joint Conference on Neural Networks
(IJCNN).
S. Q. Yahyaa, M. D. and Manderick, B. (2014b). Knowl-
edge gradient for multi-objective multi-armed bandit
algorithms. In International Conference on Agents
and Artificial Intelligence (ICAART), France. Inter-
national Conference on Agents and Artificial Intelli-
gence (ICAART).
S. Q. Yahyaa, M. D. and Manderick, B. (2014c). Multi-
variate normal distribution based multi-armed bandits
pareto algorithm. In the European Conference on Ma-
chine Learning and Principles and Practice of Knowl-
edge Discovery in Databases (ECML/PKDD).
Thompson, W. R. (1933). On the likelihood that one un-
known probability exceeds another in view of the evi-
dence of two samples. In Biometrika.
Zitzler, E. and et al. (2002). Performance assessment
of multiobjective optimizers: An analysis and re-
view. IEEE Transactions on Evolutionary Computa-
tion, 7:117–132.
ThompsonSamplingintheAdaptiveLinearScalarizedMultiObjectiveMultiArmedBandit
65
