
Parallel Shortest-path Searches in Multiagent-based Simulations with
PlaSMA
Max Gath, Otthein Herzog and Maximilian Vaske
Institute Institute for Artificial Intelligence, TZI - Center for Computing and Communication Technologies,
Bremen, Germany
Keywords: Multiagent-based Simulation, Shortest-path Algorithms, PlaSMA, JADE, Planning and Scheduling,
Autonomous Logistic Processes.
Abstract: The goods structure effect increases the complexity and dynamics of logistic processes. To handle the
resulting challenges and requirements, planning and controlling of logistic processes have to be reliable and
adaptive. Especially in these dynamic environments, Multiagent-Based Simulation (MABS) is a suitable
approach to support decision makers in order to evaluate the companies' processes and to identify optimal
decisions. This paper presents the PlaSMA multiagent simulation platform, which has been developed for
the evaluation of logistics scenarios and strategic analyses. As shortest-path searches are an essential but
cost intensive part of the agents for the simulation of transport processes, we focus on the parallel
application of a state-of-the-art Hub Labeling algorithm, which is combined with Contraction Hierarchies.
The results show, that the optimal number of concurrently running routing agents is restricted by available
cores and/or the number of agents running physically concurrently. Moreover, by slightly restricting the
agents' autonomy a significant increase in runtime performance can be achieved without losing the
advantages of agent-based simulations. This allows to simulate large real-world transport scenarios with
MABS and low hardware requirements.
1 INTRODUCTION
The so-called goods structure effect refers to a
change of the economic and logistic structure: The
production of bulk goods which are transported in
large quantities by bulk cargo transport has been
decreased, while the amount of individualized high-
end products has been increased. This trend is
aggravated by the so-called Industry 4.0 – the Fourth
Industrial Revolution and the consequent integration
of the Internet of Things and Services in production
and logistics processes based on Cyber Physical
Production Systems.
As a result, there is a much higher amount of
small-sized shipments, which have to be delivered
within guaranteed time windows and probably
within a few hours. The demanding customer
requirements and the growing cost pressure in the
logistic sector thus forces logistic transport service
providers to optimize the efficiency of their
processes.
Multiagent systems can be used to solve
complex, dynamic, and distributed problems
(Müller, 1997) in which agents are a natural
metaphor for physical objects and actors (Jennings
and Wooldridge, 1998, p. 7). Consequently,
multiagent systems are an adequate technology for
the modeling and the optimization of logistic
processes. It has been shown that their application to
logistics increases the efficiency as well as the
service quality and contributes to reduce the costs
significantly (cf. Gath et al., 2013; Dorer et al.,
2005; Fischer, 1995; Schuldt, 2011). Multiagent-
Based Simulation (MABS) combines concepts of
multiagent systems and simulation. Applying MABS
allows for the analysis of MAS before their
deployment to real world processes. Thus, it is
possible to investigate the impact of potential
changes, to calculate expected benefits, and to
identify risks that may arise by switching to new
processes and the integration of new technologies
such as MAS in advance. This is especially relevant
in scenarios where the quality of the results depends
on the outcome and/or sequence of agent
negotiations that cannot be predicted in advance
(Jennings, 2001). Moreover, MABS allows for
15
Gath M., Herzog O. and Vaske M..
Parallel Shortest-path Searches in Multiagent-based Simulations with PlaSMA.
DOI: 10.5220/0005195100150021
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 15-21
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

precise scenario investigations and strategic
analyses. For instance, effects of new pricing models
or the impact of economic cycles and natural
disasters on the supply chain can be determined.
The goal of this research is to optimize the
runtime performance of MABS in logistics. Section
2 presents the MABS framework PlaSMA, which
has been developed for simulations of logistic
processes. As shortest-path searches are cost-
intensive operations in this domain, Section 3
provides an implementation of a state-of-the-art
shortest-path algorithm which applies Hub-Labeling
in combination with Contraction Hierarchies. The
advantage of applying a Hub-Labeling algorithm in
MABS is, that shortest-path queries are calculated
by fast processed read-only operations on the
underlying graph (in contrast to classical algorithms
such as Dijkstra's algorithm (Dijkstra, 1959)). Thus,
several agents may perform searches on the same
algorithm concurrently. Section 4 investigates
established modeling approaches and identifies a
memory efficient solution, which exploits the
properties of the algorithm to optimize the runtime
performance significantly. The result facilitates the
simulation of real-world multiagent scenarios in
transport logistics with less hardware requirements
compared to other established modeling approaches.
2 THE PlaSMA SIMULATION
PLATFORM
The PlaSMA simulation platform (Warden et al.,
2010) is an agent-based event driven simulation
platform that has been designed for modeling,
simulation, evaluation, and optimization of planning
and control processes in logistics. It extends the
FIPA-compliant Java Agent DEvelopment
Framework (JADE) (Bellifemine et al., 2007) for
agent communication and coordination. PlaSMA
provides discrete time simulations, which allow for
precise simulations of processes with small
simulated time intervals (with intervals of at least
1ms). Furthermore, it ensures correct
synchronization and reproducibility (Gehrke et al.,
2008). For instance, the simulation framework
guarantees, that message transfer consumes
simulated time, because transferring messages
consumes physical time in real-world processes as
well. Consequently, the consistency of each agent
(e.g., no agent receives messages from the future and
all the agents' knowledge is consistent at a certain
point of simulated time) is also guaranteed by a
conservative synchronization mechanisms (cf.
Gehrke et al., 2008 for more details). The time
model adequacy is assured by a parameter which
controls the maximum and minimum simulated time
interval for the synchronization. Thus, PlaSMA is
capable to simulate scenarios that require fine-
grained and coarse time discretization as well.
Moreover, it supports the integration of real-
world infrastructures by the import of geographic
information from OpenStreetMap and of timetable
information (e.g., for bus lines or tram lines), which
matches the standards of the Association of German
Transport Companies (VDV) (Greulich et al. 2013).
The transport infrastructure is represented by a
directed graph where edges represent ways, such as
waterways, rails, and roads while nodes represent
traffic junctions that connect edges with each other.
The type of the road (e.g., highway, inner city road,
or pedestrian way) including its properties (e.g.,
speed limits, exact distances, and one-way
restrictions) is further specialized automatically by
processing the respective information provided by
the OpenStreetMap (see: http://openstreetmap.org)
dataset. Thus, PlaSMA allows for modeling fine-
grained infrastructures with road sections whose
speed limits are changing. As shortest-path searches
(see Section 3) on models of real-world
infrastructures are some of the most cost intensive
operations in logistic transport scenarios, this paper
focuses on an efficient implementation and
modeling of multiagent systems for scenarios that
require shortest-path information.
Figure 1: The graphical user interface of the PlaSMA
simulation platform.
In order to reliably simulate industrial and
transport processes, PlaSMA is capable of
incorporating process data of cooperating companies
and partners, e.g., customer orders or service
requests, directly into the simulation platform. This
allows for a precise analysis of real logistic
processes with low costs. Batch-runs, process
visualization, as well as automated measurements of
individually defined performance indicators allow
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
16

for fast and significant process evaluations. Figure 1
shows the graphical user interface of PlaSMA. The
software can be downloaded at
http://plasma.informatik.uni-bremen.de.
3 HUB-LABELING WITH
CONTRACTION
HIERARCHIES
Efficient shortest-path searches are essential for the
simulation of logistic transport processes, e.g., to
compute distance matrices for solving the Vehicle
Routing Problem (Golden et al., 2008; Gath et al.,
2013) or the Pickup and Delivery Problem (Parragh
et al., 2008). However, they are cost intensive
operations especially on real-world graphs. XXX
have shown that particularly in MABS Hub-
Labeling (HL) (Abraham et al., 2011) in
combination with Contraction Hierarchies (CH)
(Geisberger et al., 2012) outperforms classical
algorithms such as the Dijkstra (Dijkstra, 1959) or
the well-known A-Star algorithm. For the sake of
completeness, we present the general idea of our
implemented Hub-Labeling algorithm similarly to
Gath et al., (2014).
The idea of distance labeling algorithms is that
the distance between two nodes is only determined
by the comparison of their assigned labels, which are
ideally computed offline. Therefore, search queries
on the pre-computed labels can be performed online
efficiently. In our implementation, the Hub Labels
contain a list with references to multiple other nodes
(the hubs). Within the construction process of the
labels, the so-called cover property has to be
fulfilled. Thus, both labels of any two vertices
and must contain the same vertex that is on the
shortest - path (Abraham et al., 2012, pp. 25-26).
Thus, it is guaranteed that all shortest paths in a
graph can be determined by the labels of the source
and target nodes. The challenge is to create memory-
efficient labels that fulfill the cover property.
Applying the labeling algorithm on nodes which
are saved in Contraction Hierarchies (CH), allows
for memory-efficient label representations. In order
to build the CH, the original graph is extended to a
larger graph ' which contains direct shortcuts
between nodes instead of shortest paths in. The
algorithm iterates over all nodes and saves each
node in the next higher level of the hierarchy. In this
process, it calculates possible shortest path shortcuts
to other nodes. Therefore, the current node is
considered to be removed from the graph and it is
checked if all other shortest paths would still be
included within the graph without this node. If a
shortest path originally passed the "removed" node,
a new shortcut is created to retain this shortest path.
In general, the performance of the algorithm
depends on the sequence of nodes in which they are
added to the CH (Geisberger et al., 2012). To
determine the next node that will be processed, all
unprocessed nodes are sorted by a priority value.
The node with the highest priority is processed next.
The priority value of a node is mainly computed by
the edge difference between the current graph and
the graph with the shortcuts that result from
processing that node. Some priorities have to be
updated continuously after adding a new node to the
CH, because in every iteration the graph might be
extended by a new shortest path. Due to the fact that
the computation of the priorities is a cost-intensive
operation, the value is estimated. The better the
sequence of the iterated/selected nodes is, the less
shortcuts are determined, and the more efficient is
the memory consumption and the search on the CH.
In addition, there are also approaches which can be
applied to time-dependent graphs (Batz et al., 2008)
or to dynamically changing graphs (Geisberger et
al., 2012).
Next, the Hub-Labels are computed. This process
starts at the highest level of the CH. For each level
(node) a label is created. The label contains all
references and information about the shortest
distance to nodes of higher levels. Further
optimization techniques to reduce the memory are
not implemented yet, but provided by Abraham et al.
(2012) (pp. 26).
4 PARALLEL SHORTEST-PATH
SEARCHES IN AGENT-BASED
SIMULATION
In numerous multiagent-based approaches in
logistics, the decision making of agents requires
shortest-path information (cf. Gath et al., 2013;
Dorer et al., 2005; Fischer et al., 1995). In general,
there are only two options to acquire this
information. On the one hand the agent can compute
the shortest paths by itself. On the other hand the
agent might ask a service provider agent (a so-called
routing agent) which receives a routing request,
computes the shortest path, and finally sends the
result back to the respective agent. The goal is to
determine an adequate way of modeling for a
scenario in which numerous routing requests have to
ParallelShortest-pathSearchesinMultiagent-basedSimulationswithPlaSMA
17

be answered immediately (e.g., to compute distance
matrices of cities). Especially if we apply the Hub-
Labeling algorithm in combination with Contraction
Hierarchies, it is not sufficient to consider the
performance to handle search queries online, but
also necessary to include the time for the creation of
the Hub-Labels and CH as well as the memory
consumption, which is required to save all the labels.
In the following, we will investigate several
scenarios.
In the first case, each agent has its full autonomy
and relies not on other agents. However, each agent
has to build and save its own Hub-Labels. This is
time- and memory-intensive. In the second case, the
memory and time consuming shortest-path
operations are sourced out to one or several routing
agents. Each routing-agent must build and save the
Hub-Labels. The optimal number of parallel running
routing agents has to be determined.
Beside the above mentioned options, there is
another modeling approach that slightly violates the
agent's autonomy. It is possible to build the Hub-
Labels by a single agent and save it in a static
variable. While classical routing algorithms such as
the Dijkstra algorithm manipulate the graph by
saving distance information at the nodes to compute
the shortest paths, the HL algorithm performs
instead read-only operations on the graph. Thus,
each agent can directly access this static variable and
perform the routing requests by their own in parallel.
Depending on the computer architecture the
multiagent system is running on, these operations
are performed also physically concurrently.
However, this slightly violates the agent's autonomy,
because all agents (running on the same JVM) share
the same component. Thus they are not fully
independent of each other. Note, that PlaSMA
extends JADE, thus, each static variable is only
visible on the Java Virtual Machine (JVM).
Nevertheless, distributed simulations on multiple
machines are supported by PlaSMA. In this case,
each machine requires its own static routing
algorithm.
4.1 Experimental Setup
In this chapter, we will investigate a scenario with
1,000,000 routing requests of several agents, which
have to be answered immediately (e.g., to compute
distance matrices of cities). The goal is to determine
an adequate model which optimizes the run-time
performance of the simulation with a reasonable
memory consumption.
In order to satisfy real word requirements, we
modeled the whole transport infrastructure of
Liechtenstein with 3,607 nodes and 8,401 edges. For
the evaluation in reasonable time on conventional
hardware, we chose this area with a restricted
number of nodes and edges, because this allows to
pinpoint significant results by measuring average
values of 10 runs in each setting. Nevertheless, the
algorithm has successfully been applied to larger
infrastructures with more than 300,000 edges and
200,000 nodes. The 1,000,000 search queries are
requested by 50 agents. Thus, each agent asks for
20,000 shortest paths. The simulation is started with
an agent, which generates 20,000 search queries
with randomized start and end nodes for each of the
50 consumer agents which are created. In order to
guarantee the reproducibility of runs, the random
seed in each experiment is fixed.
In Scenario 1, each consumer agent applies its
own shortest-path algorithm. Thus, the agents start a
preprocessing step to build up the Hub-Labels as
well as the Contraction Hierarchy and process all
their queries by themselves.
In Scenario 2, the shortest-path algorithm is
implemented by the Singleton Pattern (Gamma et
al., 1995, pp. 127). As a result, there exists only a
single instance of the algorithm on each JVM. All
consumer agents process their queries by
themselves, but operate on the same algorithm saved
in a static variable.
In Scenario 3 - 12, a varying number of routing
agents are created. They maintain their own shortest-
path algorithm and receive all the queries from the
consumer agents by a FIPA-compliant ACL-
Message. Next, the routing agents compute the
shortest path of the assigned requests and send an
ACL Message with the answer back to the agent.
The assignment of search requests to routing agents
is uniformly distributed. The reproducibility of this
assignment is also ensured by applying a fixed
random seed.
All the simulations run on a notebook computer
with an Intel quad-core i5-2500k processor,
Windows 7 64bit, and 16 GB RAM.
4.2 Results
In each scenario four performance indicators were
measured. The most significant is the total (physical)
simulation time. Moreover, two performance
indicators determine the time required for
preprocessing. This is the earliest time an agent ends
its preprocessing step and the elapsed time for all the
agents to finish building the Hub-Labels and
Contraction Hierarchies. The measured performance
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
18
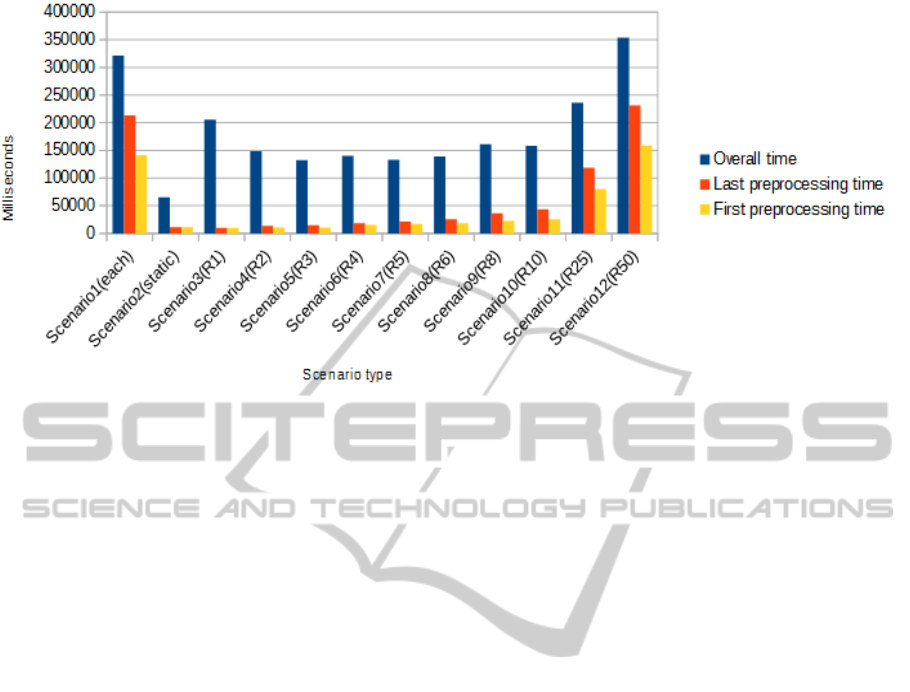
Figure 2: The average simulation time and the time required to create the Hub-Labels (of 10 runs).
indicators are average values of 10 runs. The results
are shown in Figure 2.
As the shortest-path algorithm only performs
read-only operations, the memory requirements of
the whole agent system, increases proportional to the
number of graph instances, which are created and
saved concurrently by all the agents. This is obvious,
but also rechecked in these investigations.
4.3 Discussion
The results show that providing the full autonomy of
agents requires a higher memory utilization and
longer runtime. Each agent must create and maintain
its own routing algorithm. On a quad-core
architecture, this process cannot be parallelized
physically on 50 agents, but has to be performed
sequentially. Thus, sourcing out the cost-intensive
operations to routing agents is reasonable. As a
result, the preprocessing time as well as the total
simulation time is reduced. In JADE each agent has
its own process. However, if there is just a single
routing agent, the hardware utilization is only about
25% on a quad-core processor, because all the
search queries are executed by a single agent on a
single core. Thus, the preprocessing time and the
total simulation time can be reduced by physically
concurrently running routing agents as long as the
number of routing agents is lower or equal to the
number of available cores. Consequently, the search
queries are answered in parallel and the hardware
utilization is increased. If the number of routing
agent exceeds the amount of cores, the
preprocessing for the creation of the Hub-Labels
cannot be performed in parallel anymore and the
total time for preprocessing and simulation is
increased. If each consumer agent has its own
routing agent, the performance is even higher
compared to the case that each agent has its own
algorithm. This is explained by the fact, that the
message transfer within the multiagent system
consumes additional time.
Moreover, the results show that the shortest
running time (and also the lowest memory
utilization) is reached by the static implementation
of the routing algorithm. Note that this is only
possible if the shortest-path algorithm performs
read-only operations during the search such as Hub-
Labeling on CH. Even if we compare the result of
this modeling approach to the outcome of the
scenario with four routing agents (where all the
preprocessing steps are performed concurrently), the
running time is significantly lower. This has two
reasons: On the one hand, no communication
between agents is required. On the other hand, the
capacity utilization of the hardware is higher,
because the algorithm answers four requests in
parallel at any time. When a computation is finished,
the next shortest path is computed immediately
afterwards. In contrast, with four routing agents each
agent computes its assigned shortest-path requests
and when they are finished they have to wait until
the last agent has finished its computation as well.
5 CONCLUSION AND OUTLOOK
MABS is a promising approach to evaluate and
optimize logistic processes. Although it is possible
to increase the scalability of MABS platforms in
ParallelShortest-pathSearchesinMultiagent-basedSimulationswithPlaSMA
19

general (Ahlbrecht et al., 2014) or adding some
optimization support for executing them on parallel
processors (e.g. Sano et al., 2014), shortest-path
searches remain one of the most cost-intensive
operations of the agents in logistic scenarios.
Therefore, we investigated and compared several
modeling options for shortest-path searches in the
PlaSMA simulation platform.
The implemented shortest-path algorithm is a
state-of-the-art algorithm, which applies Hub-
Labeling with Contraction Hierarchies. As Hub-
Labeling algorithms apply read-only operations for
answering search requests, several agents can share
the same (static) algorithm and perform their queries
concurrently. The results reveal that slightly
restricting the autonomy of agents by applying a
single algorithm saved in a static variable (which is
part of all the agents) leads clearly to the lowest
runtime of the simulation and lowest memory
consumption.
As long as all agents run on the same machine
(and same JVM), the disadvantage of less autonomy
in this modeling approach is of more theoretical
meaning than practically relevant. For instance, the
robustness could even be guaranteed by a second
redundant static instance of the algorithm. The
privacy is also guaranteed, because the agents must
not reveal their search queries to any other agent.
However, if the “full” autonomy of the agents
has to be guaranteed, another option is to create
several routing agents that receive routing requests,
perform shortest-path searches, and provide the
results. Although this approach consumes more time
for the whole simulation, i.e., because of the
increased time for message transfer and
synchronization of agents, it can still profit from
concurrent calculations as long as the number of
routing agents is equal or lower than the number of
available cores. Otherwise, the redundant algorithms
consume a high amount of memory (in particular if
the shortest-path searches are performed on large
graphs), and time for communication and
computation, because shortest paths are not
performed physically concurrently. In an extreme
case it is even preferable that each consumer agent
has its own algorithm. In this case the autonomy of
the agents is maximized and less communication is
required.
In conclusion, applying a static Hub-Labeling
algorithm in MABS, which is part of all agents,
allows for concurrent calculations, improves the
runtime performance of the simulation significantly,
and reduces the memory usage. In contrast to the
other established modeling approaches, this
facilitates the simulation of large real-world
scenarios with less hardware requirements.
Future research will focus on the application of
shortest-path algorithms on several distributed
machines. For instance, the PlaSMA simulation
platform supports the simulation of multiple agents
that run on containers located on different machines.
Moreover, we will investigate the behavior of
shortest-path algorithms for dynamically changing
graphs. In this case, the Hub-Labels have to be
updated after the preprocessing is finished.
ACKNOWLEDGEMENTS
The presented research was partially funded by the
German Research Foundation (DFG) under
reference number HE 989/14-1 (project Autonomous
Courier and Express Services) at the University
Bremen, Germany.
REFERENCES
Abraham, I., Delling, D., Goldberg, A.V., Werneck, R.F.,
2011. A hub-based labeling algorithm for shortest
paths in road networks. In: Experimental Algorithms.
10th Int. Sympo. SEA 2011, Lecture notes in Computer
Science, vol 6630. Springer, Berlin, pp 230-241.
Abraham, I., Delling, D., Goldberg, A.V., Werneck, R.F.,
2012. Hierarchical hub labelings for shortest paths. In:
Algorithms - ESA 2012. 20th Annual European
Symposium, Ljubljana, September 2012. Lecture notes
in computer science, vol 7501. Springer, Berlin, pp
24-35.
Ahlbrecht T., Dix, J., Köster, M., Kraus, P., Müller, J. P.,
2014. A scalable runtime platform for multiagent-
based simulation. In Proceedings of the 2nd
International Workshop on Engineering Multi-agent
Systems (EMAS2014)
Batz, G. V., Delling, D., Sanders, P., Vetter, C., 2008.
Time-dependent contraction hierarchies. In:
Proceedings of the 11
th
Works on Alg. Engineering
and Experiments, New York.
Bellifemine, F., Caire, G., Greenwood, D., 2007.
Developing multi-agent systems with jade. Chichester,
UK, Jon Wiley & Sons.
Dijkstra, E. W., 1959. A note on two problems in
connexion with graphs. Num. Math. 1:269-271.
Dorer, K., Calisti, M., 2005. An adaptive solution to
dynamic transport optimization. In: Proc. of the 4th
Int. Conf. on Autonomous Agents and Multiagent
Systems, ACM Press, pp. 45-51.
Fischer, K., Müller, J. P., Pischel, M., 1995. Cooperative
transportation scheduling: an application domain for
dai. Journal of Applied Artificial Intelligence 10:1-33.
Gamma, E., Johnson, E. R., Helm, R., Vlissides, J., 1995.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
20

Design patterns: elements of reusable object-oriented
software. Addison-Wesley.
Gath, M., Herzog, O., Edelkamp, S. , 2013. Agent-based
Planning and Control for Groupage Traffic, In: Proc.
of the 10th International Conf. & Expo on Emerging
Technologies for a Smarter World (CEWIT2013),
IEEE, Melville, USA.
Gath, M., Herzog, O., Vaske, M., 2014. The Impact of
Shortest Path Searches to Autonomous Transport
Processes, In: 4th International Conference on
Dynamics in Logistics (LDIC), Bremen, Germany (to
appear).
Geisberger, R., Sanders, P., Schultes, D., Vetter, C., 2012.
Exact routing in large road networks using contraction
hierarchies. Transportation Science 46:388-404.
Gehrke, J. D., Schuldt, A., Werner, S., 2008. Quality
criteria for multiagent-based simulations with
conservative synchronisation. In: Proc. of the 13th
ASIM Dedicated Conf. on Simulation in Production
and Logistics. Fraunhofer IRB Verlag, Stuttgart, pp.
545-554.
Golden, B., Raghavan, S., Wasil, E., (eds) 2008. The
vehicle routing problem: latest advances and new
challenges. Springer, New York.
Greulich, C., Edelkamp, S., Gath, M., 2013. Agent-based
multimodal transport planning in dynamic
environments. In: Advances in Artificial Intelligence -
36th Annual German Conference on Artificial
Intelligence, vol. 8077, Springer, Koblenz, Germany,
pp.74-85.
Jennings, N. R., 2001. An agent-based approach for
building complex software systems. Communication
of the AM 44(4):35-41
Jennings, N. R., Wooldridge, M., 1998. Applications of
intelligent agents. Springer-Verlag.
Müller, H. J., 1997. Towards Agent Systems Engineering.
Data & Knowledge Engineering, 23 (3): 217 - 245.
Parragh, S. N., Doerner, K. F., Hartl, R. F., 2008. A survey
on pickup and delivery problems part I: transportation
between customers and depot. Journal für
Betriebswirtschaft 58(1):21-51.
Sano, Y., Kadono, Y., & Fukuta, N., 2014. A Performance
Optimization Support Framework for GPU-based
Traffic Simulations with Negotiating Agents. In Proc.
of 7th Int. Workshop on Agent-based Complex
Automated Negotiations (ACAN2014).
Schuldt, A., 2011. Multiagent coordination enabling
autonomous logistics. Springer, Berlin.
Warden, T., Porzel, R., Gehrke, J. D., Herzog, O., Langer,
H., Malaka, R., 2010. Towards ontologybased
multiagent simulations: the plasma approach. In: Proc.
of the Euro. Conf. on Modelling and Simulations
(ECMS), pp 50-56.
ParallelShortest-pathSearchesinMultiagent-basedSimulationswithPlaSMA
21
