
Privacy Aware Person-specific Assisting System for Home Environment
Ahmad Rabie and Uwe Handmann
Institute of Computer Sciences, University of Applied Sciences Ruhr-West
Bottrop, Germany
Keywords:
Privacy and Security, Multimodal Biometrics, Assisting Systems, Data Fusion.
Abstract:
As smart homes are being more and more popular, the needs of finding assisting systems which interface
between users and home environments are growing. Furthermore, for people living in such homes, elderly
and disabled people in particular and others in general, it is totally important to develop devices, which can
support and aid them in their ordinary daily life. We focused in this work on sustaining privacy issues of
the user during a real interaction with the surrounding home environment. A smart person-specific assistant
system for services in home environment is proposed. The role of this system is the assisting of persons by
controlling home activities and guiding the adaption of Smart-Home-Human interface towards the needs of
the considered person. At the same time the system sustains privacy issues of it’s interaction partner. As a
special case of medical assisting the system is so implemented, that it provides for elderly or disabled people
person-specific medical assistance. The system has the ability of identifying its interaction partner using some
biometric features. According to the recognized ID the system, first, adopts towards the needs of recognized
person. Second the system represents person-specific list of medicines either visually or auditive. And third
the system gives an alarm in the case of taking medicament either later or earlier as normal taking time.
1 INTRODUCTION
Currently, assisting of people in home environment
are generally achieved by either employing assisting
systems which offer general services for all consid-
ered persons without considering their privacy and
special needs (R.A.Ramlee et al., 2013; Dohr et al.,
2010) or by using systems targeted for lonely one per-
son (Ouchi et al., 2004). In this work we present a
person-specific assisting system, which is aimed to
assist several persons and sustain their privacy and se-
curity issues at the same time. In order for an assistant
system to be having the ability of providing person-
dependent services a prior step of identifying the in-
teraction partner has to be achieved. Person identifi-
cation/verification will be achieved using special bio-
metric systems equipped with proper biometric sen-
sors. Th ID of this person will then be delivered to
the actual assisting system, which could be any smart
device, such as smart mobile phone or PC-tablet.
1.1 Biometrics
Wide range of biometric applications are currently
available on the market, under which surveillance sys-
tems, cash terminals with biometrics analysis abili-
ties, biometrics-based payment systems (Yang, 2010),
accessing digital systems, such as PCs, mobile phones
and cars, accessing online services, such as online
banking and person-specific services in home envi-
ronment (Rabie and Handmann, 2014a; Rabie and
Handmann, 2014b).
Biometrics are used either in a stand-alone mode (uni-
modal) or in a fused mode (multi-modal). Most com-
monly used biometric traits are face, fingerprint, fin-
ger vein, hand palm, iris/retina, and voice. Selecting
the proper biometric trait depends on the aimed appli-
cation and environment. For instance, adequate fin-
gerprint samples require user cooperation; whereas,
the face and iris images can be captured occasionally
by a surveillance camera. As our goal is the build-
ing an assisting system for ordinary daily life in home
environment we decided the using of traits of face,
finger vein and hand palm vein, which fulfill the the
requirements of being efficient, touch less and to be
captured accidentally.
1.2 Multimodal Biometrics
Multimodal information fusion is the task of com-
bining some interrelated information from multiple
modalities.Fusion of multiple modalities can improve
186
Rabie A. and Handmann U..
Privacy Aware Person-specific Assisting System for Home Environment.
DOI: 10.5220/0005199301860192
In Proceedings of the International Conference on Pattern Recognition Applications and Methods (ICPRAM-2015), pages 186-192
ISBN: 978-989-758-077-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Sensor
Input
Data
Decision
Feature Extraction
Feature Extraction
Feature Extraction
Feature Extraction
Feature Extraction
Feature Extraction
Feature Extraction
Classification
Classification
Classification
Classification
Classification
(a)
(b)
(c)
Σ
Σ
Σ
Figure 1: Three basic fusion methods used in the current
multimodal emotion recognition systems.
∑
presents sig-
nal, features and decision fusion levels in a, b and c respec-
tively.
the performance of the multi-modal system compar-
ing to uni-modal systems, whose performance could
be degraded by noise or illumination. It can reduce
the number of false matches, which are caused by
non-robust stand-alone biometric systems as well. In
a person identification system, while a uni-modal sys-
tem incorporates features of a single modality (face,
audio, finger print, iris, ... ) the multi-modal sys-
tems use information from multiple different modali-
ties simultaneously. In current fusion research, three
types of multi-modal fusion strategies are usually ap-
plied, namely data-/signal-level fusion, feature-level
fusion, and decision-level fusion. Fig 5.4 depicts
the three possible levels of multimodal information
fusion. Signal-level fusion is applicable solely to
sources of the same nature and tightly synchronous.
Generally it is achieved by mixing two or more phys-
ical signals of the same nature (two auditive signals,
two visual signals of two cams, two camera snapshots,
etc). This type of mixing is not feasible for multi-
modal fusion due to the fact that different modali-
ties always have different captors and different sig-
nal characteristics (auditive and visual). Feature-level
fusion means concatenation of the features outputted
from different signal processors together to construct
a combined feature vector, which is then conveyed to
the decision maker. It is used when there is evidence
of class-dependent correlation between the features
of multiple sources. For example, features can be
extracted from a video processor and speech signal.
Feature-level fusion is criticized for ignoring the dif-
ferences in temporal structure, scale and metrics. Al-
though, feature-level fusion demands synchronization
of some extent between modalities. Another draw-
back of such a fusion strategy is that it is more difficult
and computationally more intense than combining at
the decision level. This is because of the increas-
ing feature vector dimension, which consequently in-
fluences the performance of the whole system nega-
tively when real time applications are aimed to. The
third fusion strategy combines the semantic informa-
tion captured from the individual uni-modal systems,
rather than mixing together features or signals. Due
to the advantages of (I) being free of synchronization
issues between modalities, (II) using relative simple
fusion algorithms, (III) their low computational re-
quirement in contrast to the feature-based methods
and (IV) being able to join multiple traits of differ-
ent nature decision-level fusion methods are widely
adopted in the field of multi-modality person recog-
nition (Ross and Jain, 2003).The basic structure of
each used modality as well as the used method of
fusing multiple uni-modal biometric subsystems in a
mere multimodal one will be discussed in chapter 2.
Person-specific service provider will be presented in
chapter 3. NFC-based medical organizer as a special
case study will be discussed in chapter 3. Outlook and
futur work will conclude this paper.
2 MULTI-MODAL BIOMETRIC
SYSTEM
From the well known biometric treats we used face,
finger vein and hand palm vein. The reason for
this is that these features don’t demand any direct
contact to the used sensor, which serve our goal of
having a touch-less assisting system. The following
subsections give small explanation of the used uni-
modal system and a detailed explanation of the fusion
method.
2.1 Face Recognition
Face recognition is one of the most populated and al-
most the most researched method for person authen-
tication. Not few face recognition systems have been
developed for automatically recognizing faces from
either still or video images (Handmann et al., 2012;
Hanheide et al., 2008). For our system a robust, full
automatic and real-life face-recognition-based person
recognizer is employed (Rabie et al., 2008). The basic
technique applied here are Active Appearance mod-
els (AAMs) First introduced by Cootes et. al. (Cootes
et al., 2001). The generative AAM approach uses sta-
tistical models of shape and texture to describe and
synthesize face images. An AAM, that is built from
training set, can describe and generate both shape and
texture using a single appearance parameter vector,
which is used as feature vector for the classification.
PrivacyAwarePerson-specificAssistingSystemforHomeEnvironment
187

The ”active” component of an AAM is a search al-
gorithm that computes the appearance parameter vec-
tor for a yet unseen face iteratively, starting from an
initial estimation of its shape. The AAM fitting al-
gorithm is part of the integrated vision system (Rabie
et al., 2008) that consists of three basic components.
Face pose and basic facial features (BFFs), such as
nose, mouth and eyes, are recognized by the face de-
tection module (Castrill
´
on et al., 2007). This face
detection in particular allows applying the AAM ap-
proach in real-world environments as it has proven to
be robust enough for face identification in ordinary
home environments (Hanheide et al., 2008). The co-
ordinates representing these features are conveyed to
the facial feature extraction module. Here, the BFFs
are used to initialize the iterative AAM fitting algo-
rithm. After the features are extracted the resulting
parameter vector for every image frame is passed to a
classifier which perform in either identification mode,
comparing the extracted feature vector with feature
vectors of all already saved identities, or verification
mode, comparing the extracted feature vector accord-
ing to a claimed identity. Besides the feature vector,
AAM fitting also returns a reconstruction error that is
applied as a confidence measure to reason about the
quality of the fitting and also to reject prior false pos-
itives resulting from face detection. A one-against-
all Support Vector Machine (Sch
¨
olkopf and Smola,
2002) is applied as classifier.
2.2 Hand Palm Vein Recognition
Typically, palm vein recognition system performs
three basic tasks, namely image acquisition, feature
extraction and decision making. Image preprocessing
and image enhancements could be achieved in order
to get features with reliable quality for the next step
of classification. For online capturing of palm vein
images an M2Sys scanner is used. This device uses a
near infrared light to create a vein-map of the user’s
palm, which serves as a biometric feature. It scans ar-
teries beneath the skin. Therefore it is practically im-
possible these templates to be forged through creating
someone else’s biometric template. The device works
in a contact less mode, in which the user has not to
touch the sensor directly. For the stages of feature ex-
tracting and matching an algorithm similar to the one
presented by (Zhang and Hu, 2010) is utilized. Ex-
tracting the region of interest (ROI) from the captured
palm vein image is an essential step of preprocessing.
For this goal the inscribed circle-based segmentation
which extracts the ROI from the original palm vein
image is used. The basic step toward getting that is
to calculate the inscribed circle that meets the bound-
ary of a palm so that it can extract as large an area
as possible from the central part of the palm vein im-
age. First, the an edge detecting method is uded to ob-
tain the contour of the palm. Using the contour of the
palm the biggest inscribed circle is then calculated.
Once the circle is determined, ROI image is smoothed
by using the standard deviation Gaussian kernel fil-
ter. In order to reduce some high frequency noise,
ROI image is then smoothed by the Gaussian smooth
filter. Local contrast enhancement is then applied in
order to blurred ROI image caused by Gaussian filter-
ing. For the extraction of vein-pattern-based features
(vein length and minutiae) from preprocessed images
a minutiae extracting method, which is basically em-
ployed in finger print recognition systems, is adopted.
This method performs in four sub-steps. First, bina-
rization is achieved using the local threshold scheme.
A median filter is then used to reduce the noise. Fi-
nally, the morphological thinning method is used to
thin and repair the vein line and the position infor-
mation of the minutiae can be got. A minutiae based
matching method, in which the position and the ori-
entation of each corresponding couple of minutiae are
compared, is based for decision making (Tong et al.,
2012).
Figure 2: Logical OR fusion method used to combine mul-
tiple biometric Traits.
2.3 Finger Vein Recognition
Like palm vein recognition system finger vein recog-
nition systems consist of three basic components,
namely image capturing, feature extraction and de-
cision making. A suitable scanner, which employed
infra red technology from Hitachi, is used. This scan-
ner captures image of the vein inside the finger, there-
for the captured images are virtually impossible to
replicate. The scanner works by passing near-infrared
light through the finger. This is partially absorbed by
the hemoglobin in the veins, allowing an image to be
recorded on a CCD camera. Unless the location and
the orientation of the finger within the capturing de-
vice is explicitly predefined a step of image normal-
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
188
ization has to be conducted. Acting on the assumption
that the veins in a finger vein image could be seen as
lines with higher gray values as the rest of the im-
age, the task of detecting such vein could be seen as
a task of following lines within image. Line tracking
offer us the ability of doing that robustly (Miura et al.,
2004). The line-tracking process starts at any pixel
in the captured image. The current pixel position is
called the
¨
current growth point
¨
, which moves pixel by
pixel along the dark line. The direction of movement
depends on the results of checking gray values of the
surrounding neighborhood.
Scan
medicine
List
medicines
Settings
Visual
Acoustic
Hello Uwe
Choose an Activity
Processing Decision
Personal Data Set
Processing
Person-Specific
Settings Data Set
Assisting
System
Person
Recognizer
Scan
medicine
List
medicines
Settings
Visual
Acoustic
Hello Ahmad
Choose an Activity
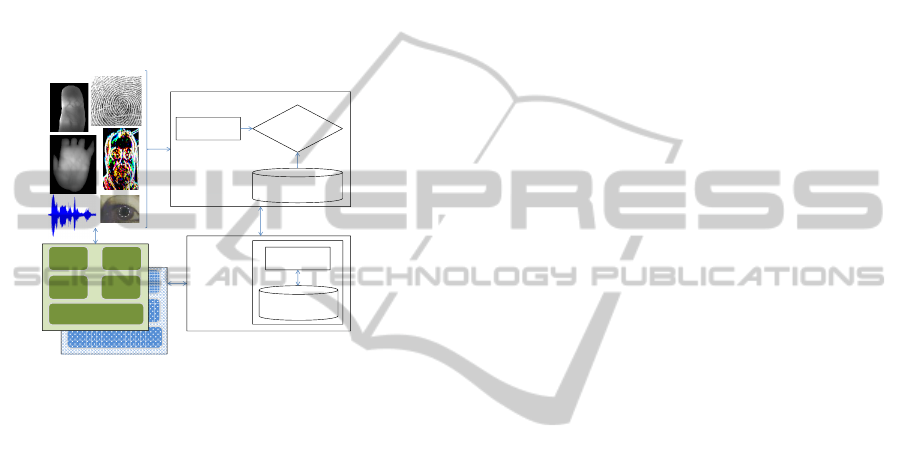
Figure 3: Basic architecture of the medical assisting system.
Person is identified by person recognizer, while the assisting
system offers person-specific services.
The lowest gray value of the cross-sectional pro-
file, which represents the depth of the profile, is
checked around the current tracking point. If pixel
p is a neighbor of the current tracking point and the
cross-sectional profile on this pixel looks like a valley
bottom, then the current tracking point is considered
to be located on a dark line. The angle between hor-
izontal line and the line that connecting the current
growth point and the considered neighboring pixel is
called θ. I order to detect the direction of the dark
line the depth of the valley is scanned with varying
angle θi. The highest value of defines the direction
of the dark line. After that, the current growth point
moves to the closest pixel toward this direction and
the process is repeated iteratively. In the case of no
detecting the valley in any direction θi, then current
growth point does not belong to any dark line and the
tracking operation starts considering another position
as current growth point. Toward detecting multiple
veins in the image multiple vein tracking sequences
start at various position simultaneously. The results of
tracking are stored in a matrix of the same size of the
original image, which is called ”locus space”. Each
entry of the matrix contains information about how
much the corresponding pixel of the original image
is tracked. Entries of matrix with high values means
that the corresponding pixels of the original image
have high probability of being belonging to a vein.
The matrix is then binarized by utilizing a threshold-
ing technique. Spatial reduction and relabeling are
then applied on the binarized image in order to re-
tain the vein line width as small as about 3 pixels in
the image. Finally, a conventional template matching
technique is applied to get the final decision about the
between the captured vein data and the already regis-
tered one (Miura et al., 2004).
2.4 OR Logic Fusion Method
As we strive for just getting the persons living in
the home environment identified and our application
does not demand very high recognition rate compar-
ing to forensic and boarding applications (Miroslav
et al., 2012), it suffices when the person is iden-
tified by means of analysis at least one biometric
treat. That means, logically, that the decisions of
applied stand-alone biometric systems (uni-modals)
have to be joined using simple OR rule. To achieve
that the face-based, finger-vein-based and hand-palm-
vein-based uni-modal sub-systems are joined in one
multi-modal person recognition system using a sim-
ple OR logic, as depicted in Fig. 2.
3 PERSON-SPECIFIC SERVICE
PROVIDER
The basic structure of the whole system could be di-
vided in two basic subsystems, person recognition
subsystem and medicine organizer, as illustrated in
Fig. 3. The former is based on the analysis of one
or more biometric treats in order to identify the inter-
action partner, while the latter is a PC-tablet or smart
phone equipped with modern utilities such as NFC
and blue tooth. The system has the role of adapt-
ing according to the needs of its interaction partner.
After the person is identified by the multi-modal bio-
metric sub-system the assisting system modifies first
the system-user interface accordingly. This modifi-
cation could include the changing of system screen-
ing theme and interaction medium. Second the sys-
tem serves the adapting of the surrounding environ-
ment towards the needs of its interaction partner. This
could include the setting of heating and light condi-
tions or even giving commands to prepare preferred
meals or coffee. Socially the system could call the
person-specific contact list and announce the daily ar-
rangements, appointments and activities. Addition-
ally the system sustains the privacy issues of multiple
PrivacyAwarePerson-specificAssistingSystemforHomeEnvironment
189

persons living in one household as it has the ability of
connecting several portable devices according to the
identified ID. Face, finger vein or hand palm vein data
are acquired from the elderly interaction partner using
a camera fixed behind the mirror or the door of the
first aid box in bathroom or a finger vein sensor encap-
sulated within blood glucose meter or by a hand palm
vein sensor hidden in a hand air dryer (inh, ). Once
one or more of the above mentioned biometric fea-
tures of the interaction partner are captured, either de-
liberately or accidentally, the suitable biometric fea-
tures are extracted and analyzed by the corresponding
person recognition subsystem and the final decision
of the system is delivered as a person-ID to the serice
provider. After the interaction partner is identified the
serice provider (PC-tablet, smart phone) modifies first
the theme of the interface in such a way, that it fulfills
the needs of the recognized person. A list of person-
specific settings for the surrounding environment are
then called and processed.
4 CASE STUDY: NFC-BASED
MEDICAL ORGANIZER
An NFC-Based medical assisting system is imple-
mented as a special case of such assisting systems.
The system is implemented on a smart devise, which
might be a tablet, smart phone or micro-controller
with proper peripheries. The system has the abil-
ity of reading and writing NFC tags encapsulated in
the medicine packages. Additionally the system is
so implemented, that it fetches entries from a pre-
saved medicine data base according to the ID of the
scanned medicine. The organizer gives then either
feedback to the computer system in order to display
the doses of the detected medicine or it displays it in
its own screen. The organizer gives alarm if the time
of the next taking is elapsed or if the next taking of
this medicine is taking place prematurely. In practice,
the biometric subsystem is implemented on a normal
PC equipped with suitable biometric devices, as dis-
cussed in chapter 2. A nexus PC-tablet is used for
implementing the NFC-based medical organizer. The
communication between both subsystems is achieved
via TCP-connection. A synchronization process is it-
eratively done in order to get both person data base,
which is saved on the normal PC, and a medicine data
base, which is saved on the PC-tablet, synchronized
permanently. When the interaction partner is identi-
fied by the biometric system the ID of this person will
be sent to the tablet in order to fetch the correspond-
ing entries of the medicine data set. Assigning MAC
addresses of portable devices ensured secure connec-
(a)
(b)
(c)
Figure 4: snapshot of the medical organizer implemented
on a PC-tablet. The figure displays the medication of the
scanned medicine (a), alert that the the medicine has been
already taken (b) and that the taking time of it is due (c).
tion between the biometric system and the only one
device of the identified person. That sustains privacy
issues of persons sharing one household. The sys-
tem is evaluated from two subgroups with four per-
sons each. The former was a group of students in the
age between 20-25 year, while the latter was a group
of elderly people elder than 60 year. The reason of
including the youth student is to take the familiariza-
tion with modern devices into account. Although the
young group has no bodily limitations that prevents
them assisting themselves medicinally, it holds such
systems as useful for the modern life with much daily
activities. The group of elderly people holds it as
compensating for weak perception skills. Neverthe-
less, smooth adapting of the person-specific interface
is demanded in order to overcome the ambiguity the
of given feedback to the interaction partner.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
190

5 CONCLUSION AND OUTLOOK
In this paper we presented our approach of integrat-
ing a person identification and serive provider sub-
systems in a person-specific medical assisting system
for home environment application. As we strive to
provide for persons a touch-free assistance, we used
some biometric traits of face, finger vein and hand
palm vein to identify persons as a prior step towards
offering person-specific services. As a special case
we presented an person-specific NFC-based medical
assisting system, which provide healthy support for
elderly and disabled people and offers for them a reli-
able alleviation for their ordinary life situations. The
results indicate that the system was useful for the tar-
get group. It provides for them a complete healthy
support and relieve their warrens about the accurate-
ness of the taken medicine and the taking time.
An open issue concerns the problem of ambigu-
ity of the given feedback to the interaction partner, as
the style of the feedback should depend on the bod-
ily limitations of the interaction partner. To solve this
problem we focus for the next step on the considering
of the whole health status and the bodily limitations
of the interaction partner. Another aspect is the in-
serting of closed loop health services within the loop,
which allows for medical practitioner and pharmacist
accessing the medical profile of considered people
for control and support reasons (Dohr et al., 2010).
Taking the analysis of affective states of the interac-
tion partner as a feed back into account should add
a reasonable improvement to the whole performance
of the system (Rabie et al., 2009; Rabie and Hand-
mann, 2011). A future comprehensive evaluation with
a larger set of test persons could validate the applica-
bility of the system in real life conditions.
ACKNOWLEDGEMENTS
This work was partly funded by the Ministerium f
¨
ur
Innovation, Wissenschaft und Forschung des Landes
NRW, Germany.
REFERENCES
Fraunhofer inhaus zentrum www.inhaus.fraunhofer.de/de/
downloads/broschuere.html.
Castrill
´
on, M., D
´
eniz, O., Guerra, C., and Hern
´
andez, M.
(2007). Encara2: Real-time detection of multiple
faces at different resolutions in video streams. Journal
of Visual Communication and Image Representation,
18(2):130–140.
Cootes, T. F., Edwards, G. J., and Taylor, C. J. (2001). Ac-
tive appearance models. Pattern Analysis and Ma-
chine Intelligence PAMI, 23(6):681–685.
Dohr, A., Modre-Osprian, R., Drobics, M., Hayn, D., and
Schreier, G. (2010). The internet of things for ambient
assisted living. In Seventh International Conference
on Information Technology.
Handmann, U., Hommel, S., Brauckmann, M., and Dose,
M. (2012). Towards Service Robots for Everyday
Environments, chapter Face Detection and Person
Identification on Mobile Platforms, pages 227–234.
Springer.
Hanheide, M., Wrede, S., Lang, C., and Sagerer, G. (2008).
Who am i talking with? a face memory for social
robots.
Miroslav, B., Petra, K., and Tomislav, F. (2012). Building
a framework for the development of biometric foren-
sics. In 35’th International Convention on Informa-
tion and Communication Technology, Electronics and
Microelectronics.
Miura, N., Nagasaka, A., and Miyatake, T. (2004). Feature
extraction of finger-vein patterns based on repeated
line tracking and its application to personal identi-
fication. Machine Vision and Applications archive,
15:194–203.
Ouchi, K., Suzuki, T., and Doi, M. (2004). Lifeminder:
a wearable healthcare support system with timely in-
struction based on the user’s context. In 8’th IEEE
Inter. Workshop on Advanced Motion Control.
Rabie, A. and Handmann, U. (2011). Fusion of audio- and
visual cues for real-life emotional human robot inter-
action. In Annual Conference of the German Associa-
tion for Pattern Recognition.
Rabie, A. and Handmann, U. (2014a). Nfc-based person-
specific medical assistant for elderly and disabled peo-
ple. In International Conference on Next Generation
Computing and Communication Technologies.
Rabie, A. and Handmann, U. (2014b). Person-specific con-
tactless interaction, usability of assistance and infor-
mation systems at home (usahome). Catalog Human-
Machine Interaction, NRW Innovation Alliance, 2014.
Rabie, A., Lang, C., Hanheide, M., Castrillon-Santana, M.,
and Sagerer, G. (2008). Automatic initialization for
facial analysis in interactive robotics. In The 6’th In-
ternational Conference on Computer Vision Systems.
Rabie, A., Vogt, T., Hanheide, M., and Wrede, B. (2009).
Evaluation and discussion of multi-modal emotion
recognition. In The 2’nd International Conference on
Computer and Electrical Engineering ICCEE.
R.A.Ramlee, M.A.Othman, Leong, M., M.M.Ismail, and
S.S.S.Ranjit (2013). Smart home system using an-
droid application. In International Conference of In-
formation and Communication Technology ICoICT.
Ross, A. and Jain, A. (2003). Information fusion in biomet-
rics. Pattern Recognition Letters, 24(13):2115–2125.
Sch
¨
olkopf, B. and Smola, A. (2002). Learning with Ker-
nels: Support Vector Machines, Regularization, Opti-
mization, and Beyond. Cambridge Press.
Tong, X.-F., Li, P.-F., and Han, Y.-X. (2012). An algorithm
for fingerprint basic minutiea feature matching. In In-
PrivacyAwarePerson-specificAssistingSystemforHomeEnvironment
191

ternational Conference on Machine Learning and Cy-
bernetics.
Yang, J. (2010). Biometrics verification techniques comb-
ing with digital signature for multimodal biometrics
payment system. In International Conference on
Management of e-Commerce and e-Government.
Zhang, H. and Hu, D. (2010). A palm vein recognition sys-
tem. In International Conference on Intelligent Com-
putation Technology and Automation.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
192
