
Vessel Rotation Planning
A Layered Distributed Constraint Optimization Approach
Shijie Li, Rudy R. Negenborn and Gabriel Lodewijks
Faculty of Mechanical, Maritime and Materials Engineering,
Delft University of Technology, Mekelweg 2, 2628 CD Delft, The Netherlands
Keywords:
Multi-agent Systems, Constraint Optimization, Planning and Scheduling.
Abstract:
Vessel rotation planning concerns the problem of assigning rotations to vessels over a number of terminals for
loading and unloading containers in a large port. Vessel operators and terminal operators communicate with
each other to make appointments about the rotation plans for the vessels. However, it happens frequently that
these appointments cannot be met. Thus, it is important to generate the rotation plans for the vessel operators
in an efficient automated way. In this paper, we propose an approach to solve the vessel rotation planning
problem by modeling the problem as a layered distributed constraint optimization problem (DCOP). To
evaluate the performance of the proposed approach, combinations of three DCOP algorithms are considered,
namely, Asynchrounous Forward Bounding, Synchrounous Branch and Bound, and Dynamic Programming
Optimization Protocol. We evaluate the solution quality and computational and communication costs of these
three algorithms when solving the vessel rotation planning problem using the proposed layered formulation.
1 INTRODUCTION
A vessel rotation is the sequence in which a vessel
visits different terminals in a large port. The
vessel rotation planning problem (VRPP) concerns
the problem of assigning rotations to a number
of vessels over a number of terminals that they
have to visit. The decision makers involved are
vessel operators and terminal operators. Vessel
operators are responsible for the voyage plan of
vessels and coordinating inland shipping activities,
while terminal operators are responsible for the
transshipment of containers between deep sea vessels,
trains, trucks, and inland vessels as well as the
temporary storage of containers. As an example, on
a typical day, around 25 inland vessels visit the Port
of Rotterdam, and each vessel visits on average 8
different container terminals (Moonen et al., 2007).
Nowadays, vessel operators and terminal opera-
tors communicate with each other through telephone,
fax and e-mail for making appointments. However,
in practice, the appointments made often cannot be
met (Melis et al., 2003). In the port of Rotterdam,
the average rotation time for an inland vessel is
approximately 22.5 hours, of which only 7.5 hours
are used for loading and unloading, the rest of the
time vessels are waiting and traveling (Moonen et al.,
2007). A disturbance at one terminal can lead to the
interruption of the operations of a vessel and terminal
operators elsewhere. This can make it difficult for
vessel operators to stick to the appointments made
with terminal operators (Douma, 2008).
There have been several publications on the
alignment of vessels and terminals in recent years.
In (Schut et al., 2004), a multi-agent based and
distributed planning system named APPROACH has
been introduced. The outcomes of the software
sometimes, however, contained routes considered
unlogical and with longer sailing times than needed
(Moonen et al., 2007). In (Douma et al., 2009)
the same type of agents is used but with different
interaction protocols and agent structure. The authors
improve the multi-agent systems by considering de-
sign choices that could influence the acceptance of the
end users and the extent to which users can optimize
their operations in (Douma et al., 2012).
The problem considered in this paper consists of
finding in an automated way the best solution to a
VRPP rotation plan for a given set of vessels. Our ap-
proach proposes to use layered distributed constraint
optimization (DCOP). DCOP is a theoretical model
framework where several agents communicate with
each other to take on values so as to minimize the
sum of the resulting constraint costs. In (Li et al.,
166
Li S., R. Negenborn R. and Lodewijks ..
Vessel Rotation Planning - A Layered Distributed Constraint Optimization Approach.
DOI: 10.5220/0005202801660173
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 166-173
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2014), we made the a first proposal for using DCOP
for the VRPP. In this paper, we extended this work
firstly proposing a layered DCOP structure that splits
the rotation planning process into two layers so that
relatively large problem instances can be considered;
secondly, we propose a different model from (Li
et al., 2014); we introduce waiting time variable in
the objective function, so that the final rotation plans
include the arrival, waiting, departure and travel time
of each vessel, which makes the model more realistic;
thirdly, the performance of combinations of three
DCOP algorithms are compared with respect to the
communication load and simulated time.
This paper is organized as follows. In Section 2,
the definitions for DCOP and VRPP are introduced.
In Section 3, the VRPP is defined and formulated
as layered DCOP and solution algorithms are in-
troduced. Section 4 presents the implementation
of the proposed approach and experimental results.
Conclusions and future work are given in Section 5.
2 DCOP AND LAYERED DCOP
2.1 Distributed Constraint
Optimization Problems
We use the DCOP formalism as defined in (Petcu,
2009). A DCOP is represented by a triple
hA, C OP , R
ia
i, where, A = {A
1
, . . . , A
N
} is a
set of N agents; C OP = {COP
1
, . . . , COP
N
} is a set
of disjoint, local Constraint Optimization Problems
(COPs); COP
i
is called the local sub-problem of
agent A
i
, and has to be solved by agent A
i
; COP
i
is a
triple hX
i
, D
i
, R
i
i, where X
i
is a set of variables that
belongs to A
i
; D
i
is a set of finite variable domains;
R
i
is a set of utility functions, which can also be used
to represent objectives, hard and soft constraints;
R
ia
= {r
ia
1
, . . . , r
ia
|R
ia
|
} is a set of inter-agent utility
functions defined over variables of multiple agents.
Each r
ia
l
: scope(r
ia
l
) → R expresses the utility for
joint decision obtained by the agents that have
variables involved in r
ia
l
. The agents involved in r
ia
l
can decide on the values of the variables involved.
The objective of the agents solving a DCOP is
to find the assignments to all variables X
∗
such that
all the constraints are satisfied (expressed via utility
functions) and the sum of values of all the utility
functions representing the objectives is maximized,
X
∗
= arg max
N
∑
i=1
|R
i
|
∑
v=1
r
iv
(X
i1
, . . . , X
i|X
i
|
)
!
+
|R
ia
|
∑
l=1
r
ia
l
,
To find the optimal solution X
∗
, agents need to
communicate and exchange messages that include
information on the assignments of values to variables
and the related utility values among each other. Thus,
the total number of messages and the size of messages
sent by the agents is an important performance metric
for measuring the efficiency of DCOP algorithms.
Based on the completeness of the algorithms,
DCOP algorithms can be categorized as complete
and incomplete algorithms. Complete algorithms
typically do an exhaustive search over the problem
space: thus, they can guarantee finding an optimal
solution, while incomplete algorithms usually use
local search methods to find locally optimal solutions,
and thus can potentially get trapped in local minima
or fail to converge to any solution altogether. In
(Petcu, 2009), a detailed description and comparison
of the DCOP algorithms can be found. In this paper,
we compare the performances of the combinations of
three different complete algorithms, including DPOP,
AFB and SyncBB.
2.2 Layered DCOP
As solving DCOP problems is NP-hard (Modi et al.,
2005), increasing the number of variables increases
the complexity of the problem exponentially. There-
fore, using straightforward DCOP methods for solv-
ing VRPPs that consist of many vessels and terminals
brings high computation and communication costs.
Partitioning of the DCOP could significantly improve
the solution process.
In (Hosseini et al., 2013), the authors consider
a hierarchical DCOP setting for a target to sensor
allocation problem, in which they change the orig-
inal DCOP as a hierarchical set of smaller DCOPs
with shared constraints in order to avoid significant
computational and communication costs. The results
show that compared with a non-hierarchical structure,
the hierarchical modeling technique provides superior
results, with the advantage becoming more significant
under increased problem size and complexity.
Using a partitioned method prevents the creation
of large DCOPs, potentially reducing the compu-
tational complexity greatly (Hosseini et al., 2013),
although this can also be at the cost of lower solution
quality. Thus, in this paper we propose a layered
structure for the VRPP formulated as DCOP so
that the computation and communication costs can
be reduced. We split VRPP into two layers of
DCOPs, the solutions from the upper layer will be the
constraints in the lower layer. On the upper layer is
the DCOP that involves all the vessels, while in the
lower layer, there are sets of smaller DCOPs, each
vessel having 1 DCOP.
VesselRotationPlanning-ALayeredDistributedConstraintOptimizationApproach
167

3 LAYERED DCOP FOR VESSEL
ROTATION PLANNING
3.1 Vessel Rotation Planning Problem
VRPP concerns selecting the rotation plan consisting
of sequences and arrival and departure times of
vessels to terminals in a port area. To model the VRPP
as a DCOP, we make the following assumptions:
• Decisions are made at discrete time steps, so
discrete time slots can be considered.
• Each vessel knows which terminals it needs to
visit. The visiting sequence, is unknown. Each
vessel has its own preference over the visiting
sequence for different terminals.
• Distances between terminals are given.
• Service time of a vessel at a terminal is known.
The problem can now be formalized using the follow-
ing variables:
• A set of vessels: V = {1, 2, 3, ..., N}
• A set of terminals: T = {1, 2, 3, ..., M}
• A set of discrete time slots: D = {1, 2, 3, ..., P}
• x
i j
represents the time slot at which vessel i is at
terminal j
• a
i j
, d
i j
and w
i j
represents the arrival, departure,
and waiting time of vessel i at terminal j, respec-
tively
We use the following parameters in our model:
• U
k
i j
represents the preference of vessel i of being
at terminal j during time slot k
• W
k
i j
represents the utility value of variable w
i j
• s
i j
represents service time of vessel i at terminal j
• t
mn
represents traveling time from terminal m to n
• [T
k−1
j
, T
k
j
] is a fixed time window for terminal j
when it is visited by vessels during time slot k
U
k
i j
is used to represent the preferences of vessel i
at terminal j. For example, U
1
11
= 5, U
2
11
= 4, U
3
11
= 3
means that vessel 1 prefers to visit terminal 1 during
time slot 1, since it has the highest utility value. These
utilities are implemented in the DCOP framework by
assigning different preference values (utility values
that represents the preference of vessels) when x
i j
= k,
and assigning 0 to all the situation when x
i j
6= k.
W
k
i j
is used to represent the utility value for w
i j
=
k. A higher value of k represents a longer waiting time
of vessel i at terminal j. Thus, the higher the value of
k is, the lower the value of W
k
i j
will be. Service time
s
i j
and traveling time t
mn
are integer constants.
[T
k−1
j
, T
k
j
] is a fixed time window for terminal j
when it is visited by vessels during time slot k, for
example, [T
3
1
, T
3
1
] = [6, 10] means that if vessel i visit
terminal 1 during time slot 3, the arrival time of vessel
i at terminal 1 must be within the time window [6, 10].
We introduce the concept of time window to ensure
that for the vessel that visits terminal j during time
slot k, it can be serviced only if it arrives at the
terminal within a specified time window [T
k−1
j
, T
k
j
].
T
k
j
is the deadline for a vessel’s arrival to be serviced
at terminal j if it visits the terminal during time slot k.
The objective is to find the optimal rotation
plan for vessels, which includes the sequences and
departure and arrival time at each terminal, such that
a set of utility functions are maximized.
3.2 Agents Structure
VRPP can be modeled as a DCOP by considering the
vessels as agents, the constraints related with vessels
as constraints of local problems of the agents. As
the constraints for terminals usually involve variables
from different vessel agents, these constraints can
considered as inter-agent utility functions. In our
model, agent A
i
represents vessel i. In the local
problem of A
i
, values of variables x
i j
, a
i j
, d
i j
and w
i j
are determined by A
i
. The inter-agent and local utility
functions are defined as hard constraints related to a
vessel i. The preference of vessels at terminals during
different time slots are also considered as the utilities
of the local COPs of the vessel agents.
For the DCOP we will formulate, the objective
is find the assignments of values from domain D to
variables x
i j
, a
i j
, d
i j
and w
i j
, that maximizes the sum
of values of the utility functions of local COPs and the
inter-agent utility functions. The inter-agent utilities
are represented as the terminal capacity constraints.
Based on the above structure, we can provide a
general definition of the VRPP as DCOP, as a tuple of
the following form, hA , C OP , R
ia
i, in which A is the
set of vessel agents; C OP is the set of local constraint
optimization problems for each vessel agent; R
ia
is
the set of inter-agent utility functions defined over
variables from different vessel agents.
3.3 Layered DCOP for VRPP
Problem solving using a layered structure uses a top
down approach. As we can see from Figure 1, the
upper layer is what we define as assignment problem,
which decides the sequence in which the vessels visit
different terminals. When the solutions have been
obtained at the higher layer, the lower layer, which we
define as scheduling problem, will decide the exact
arrival, departure and waiting time of each vessel at
each terminal. There is one DCOP in the upper layer
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
168

Figure 1: Layered DCOP structure.
that relates to all the vessels, while there are multiple
smaller DCOPs in the lower layer, each relating only
to 1 vessel. After finding an optimal solution for the
upper layer DCOP problem, the lower layer’s DCOP
solver starts solving each problem separately. There
are common variables between the upper layer DCOP
and the lower layer DCOPs. In solving the problem
of the lower layer, the algorithm is not concerned with
the values maintained by the upper layer, but only
with the solutions obtained from upper layer.
3.3.1 Assignment Problem
At the upper layer, we only consider the sequence of
vessels’ visits to terminals. Thus, only variable x
i j
which represents the time slot at which vessel i is at
terminal j is involved. The exact arrival, departure
and waiting time of vessels will not be included in
this layer; these are considered in the lower layer.
The local COP
i
of A
i
is defined by a triple
hX
as
i
, D
as
i
, R
as
i
i. Here, X
as
i
= {x
i1
, . . . , x
i|X
as
i
|
} is a
set of variables, in which x
i j
represents the time
slot at which vessel i is at terminal j; D
as
i
=
{d
i1
, . . . , d
i|D
as
i
|
} is a set of finite variable domains,
for each d
i j
∈ {1, 2, 3, ..., P}; R
as
i
= {r
as
i1
, . . . , r
as
i|R
as
i
|
}
contains utility functions that represent the constraints
related with vessels and the their preferences over
different terminals during different time slots. Thus,
we have,
r
as
i1
=
U
k
i j
: ifx
i j
= k ∀i ∈ {1, 2, ..., N},
∀ j ∈ {1, 2, ..., M}, k ∈ {1, 2, ..., P}
0 : otherwise
(1)
r
as
i2
=
0 : all-different(x
i1
, . . . , x
iM
)
∀i ∈ {1, 2, ..., N}
−∞ : otherwise
(2)
Utility function r
as
i1
represents the preferences of
vessel i being at terminal j during time slot k. U
k
i j
is a constant defined for different combinations of i,
j and k. Utility function r
as
i2
is defined based on the
all-different constraint as in (Rossi et al., 2006), it
uses the all-different constraint to ensure that each
vessel will only be at most at one terminal during a
time slot.
In addition, we define the inter-agent utility
functions as the capacity constraints of terminals,
i.e. each terminal can serve only a limited num-
ber of vessels simultaneously. We incorporate the
cumulative constraint from constraint programming
to represent the inter-agent utility functions r
ia,as
of
the assignment problem,
r
ia,as
=
0 : cumulative((x
1 j
, . . . , x
N j
), s
i j
, 1, N
j
)
∀ j ∈ {1, 2, ..., M}
−∞ : otherwise
(3)
In which, (x
1 j
, . . . , x
N j
) are the variables repre-
senting time slots at which the vessels that will be
at terminal j. s
i j
is the service time for a vessel
at a terminal. Consumption rate c is set to 1
because a vessel will be serviced by one terminal.
N
j
is the number of vessels one terminal can serve
simultaneously.
For the overall DCOP assignment problem, the
objective is to maximize the sum of values of
individual utility functions and the inter-agent utility
functions, defined as:
max
N
∑
i=1
(r
as
i1
+ r
as
i2
) + r
ia,as
!
(4)
3.3.2 Scheduling Problem
When the solutions x
i j
from the assignment prob-
lem have been obtained, we can determine the
sequence of vessels to different terminal j and
the time slots during which each vessel will be
at terminals. We can formulate the scheduling
problem based on DCOP similar to the assignment
problem as a tuple hA
sc
, C OP
sc
, R
ia,sc
i. The lo-
cal problem COP
sc
i
of each vessel agent A
sc
i
is
defined by a triple hX
sc
i
, D
sc
i
, R
sc
i
i, where, X
sc
i
=
{a
i1
, . . . , a
i|X
sc
i
|
, d
i1
, . . . , d
i|X
sc
i
|
, w
i1
, . . . , w
i|X
sc
i
|
} is a set
of variables, and a
i j
, d
i j
represent the arrival, depar-
ture time of vessel i from terminal j, w
i j
represents
the waiting time of vessel i at terminal j; D
sc
i
=
{k
i1
, . . . , k
i|D
sc
i
|
}is a set of variable domains, for each
k
i j
∈ {1, 2, 3, ..., P}; R
sc
i
= {r
sc
i1
, . . . , r
sc
i|R
sc
i
|
} contains
utility functions that represent the constraints for
vessels’ arrival, departure and waiting at terminals.
VesselRotationPlanning-ALayeredDistributedConstraintOptimizationApproach
169

The inter-agent utility function r
ia,sc
for the
scheduling problem is defined as follows:
r
ia,sc
=
(
0 : if x
im
0
= x
im
+ 1, then a
im
0
= d
im
+t
mm
0
∀i ∈ {1, 2, ..., N}, ∀m, m
0
∈ {1, 2, ..., M}
−∞ : otherwise
(5)
r
ia,sc
ensures that if vessel i travels from terminal
m to m
0
, the arrival time at terminal m
0
is the sum of
departure time from m and the traveling time t
mm
0
.
For each vessel agent, we have the utility func-
tions as follows (for the following constraints we have
k, k
0
∈ {1, 2, 3, ..., P}),
r
sc
i1
=
0 : if x
i j
= k, then a
i j
∈ [T
k−1
j
, T
k
j
]
∀i ∈ {1, 2, ..., N}, ∀ j ∈ {1, 2, ..., M}
−∞ : otherwise
(6)
r
sc
i2
=
0 : if d
i j
= a
i j
+ w
i j
+ s
i j
∀i ∈ {1, 2, ..., N}, ∀ j ∈ {1, 2, ..., M}
−∞ : otherwise
(7)
r
sc
i3
=
0 : if x
i j
= k, then w
i j
= T
k
j
− a
i j
∀i ∈ {1, 2, ..., N}, ∀ j ∈ {1, 2, ..., M}
−∞ : otherwise
(8)
r
sc
i4
=
W
k
0
i j
: ifw
i j
= k
0
∀i ∈ {1, 2, ..., N},
∀ j ∈ {1, 2, ..., M}
0 : otherwise
(9)
Utility function r
sc
i1
ensures that if vessel i visits
terminal j during time slot k, the arrival time should
be within the time window [T
k−1
j
, T
k
j
] of time slot k. If
vessel i cannot arrive within the time window, it will
not be serviced during time slot k and has to wait to
be serviced during the next time slot.
Utility function r
sc
i2
ensures that the departure time
of a vessel from a terminal equals the sum of the
vessel’s arrival time, waiting time and service time
at the terminal. Utility function r
sc
i3
ensures that the
waiting time is the difference between the arrival time
of a vessel i at terminal j and the start time for the
vessel to be serviced at the terminal.
Utility function r
sc
i4
ensures that the shorter the
waiting time w
i j
is, the higher the utility value W
k
0
i j
will be. This utility is used to make sure that the
objective of maximization of the sum of utility values
will lead to the minimization of the sum of waiting
times. As we can see, r
sc
i1
, r
sc
i3
, r
ia,sc
depends on the
solutions for x
i j
from the assignment problem.
The objective is to maximize the sum of the values
of the individual utility functions and the inter-agent
utility functions, defined as:
max
N
∑
i=1
(r
sc
i1
+ r
sc
i2
+ r
sc
i3
+ r
sc
i4
) + r
ia,sc
!
(10)
3.4 Solution Algorithms
In this section, we will use DPOP introduced by
(Petcu and Faltings, 2005a) as an example to illustrate
the mechanism of solving vessel rotation planning
problem based on DCOP.
Firstly, a depth first search (DFS) structure is
established using a distributed DFS algorithm. Each
variable is considered as a node. Each agent controls
a set of variables. The nodes consistently label
each other as parent/child nodes, and the edges are
identified as tree/back edges. In our case, agent
A
as
i
and agent A
sc
i
represent the same vessel i in
the assignment problem and scheduling problem,
respectively. This means that variables x
i j
are owned
by A
as
i
, while a
i j
, d
i j
and w
i j
are owned by A
sc
i
.
The second phase is UTIL propagation, the objec-
tive of which is to propagate aggregated utilities up
the DFS tree. Initially, messages travel up in the DFS
tree, propagating information about the aggregated
optimal costs/utilities. For example, for each variable
x
i j
belonging to agent A
as
i
, agent A
as
i
joins the
constraints involving x
i j
together, while ignoring all
constraints that involve at least one descendant of x
i j
.
Then agent A
as
i
waits for the reception of a UTIL
message from each of the child nodes of x
i j
, and
joins them all together with its constraints. Finally,
agent A
as
i
eliminates x
i j
from the join, and sends the
resulting utility to the parent node of x
i j
. This utility
corresponds to the maximum achieved utility for the
whole subtree rooted at x
i j
, as a function of the value
for the parent node of x
i j
and also the values for other
variables higher than x
i j
in the DFS tree.
The third phase of DPOP is VALUE propagation.
At the end of the UTIL propagation, the root variable
has obtained its own local optimal value based on
the messages it received. The agent that controls the
value of the root variable sends this optimal value to
each of the child nodes of the root variable through
VALUE messages. Recursively, for each variable x
i j
,
when the corresponding agent receives the VALUE
message from the parent node of that variable x
i j
, is
able to look up its own corresponding optimal value
during the UTIL propagation phase. To each of the
children nodes of x
i j
, agent A
as
i
sends not only the
optimal value of x
i j
, but also the optimal values for all
the variables in x
i j
’s children node’s separator(parent
and pseudo-parents nodes), which are contained in
the VALUE message it receives. Optimal decisions
are hereby propagated down the DFS tree, until all
variables have been assigned optimal values.
SyncBB and AFB are alternative DCOP algo-
rithms that use a linear ordering of agents instead
of a DFS tree. For SyncBB, at each step an agent
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
170
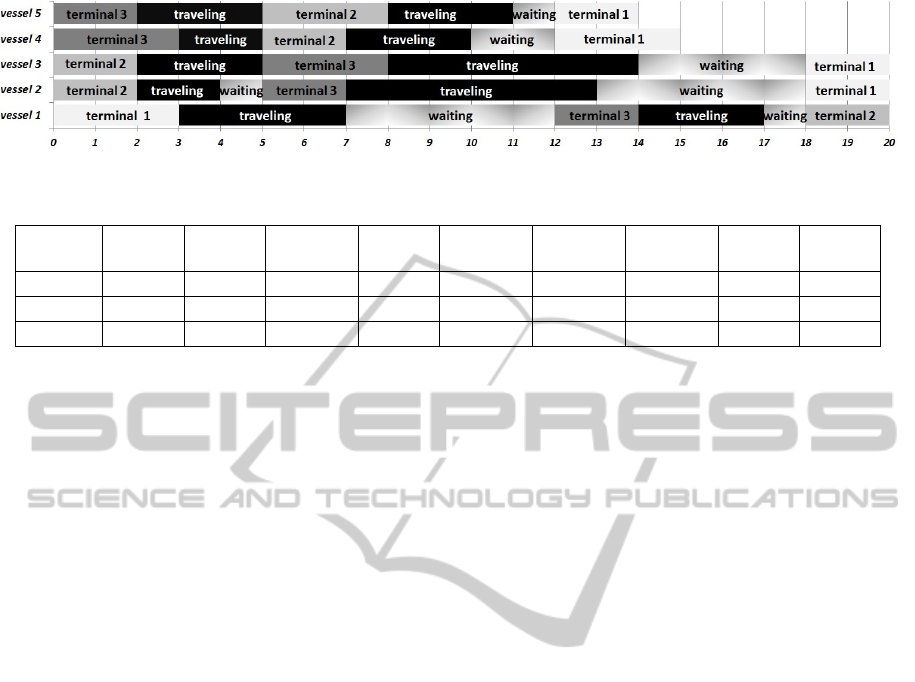
Figure 2: Rotation plan (5 vessels, 3 terminals)
Table 1: Comparison of the total number of messages for different cases and algorithms (by type)
DPOP+
DPOP
AFB+
AFB
SyncBB+
SyncBB
DPOP+
SyncBB
SyncBB
+ DPOP
AFB +
SyncBB
SyncBB+
AFB
DPOP+
AFB
AFB +
DPOP
Case 1
*
127 4,923 4,685 2,013 2,815 4,746 4,853 2,574 2,885
Case 2
*
307 14,562 11,559 3,509 8,357 12,412 13,706 5,659 9,120
Case 3
*
392 24,132 23,520 4,650 8,927 21,230 22,964 6,752 10,237
* The total number of messages exchanged is the same for the three different tests of the same case.
tries to assign a value to the current assignment
without causing the lower bound to reach the upper
bound while for AFB, agents perform asynchronous
concurrent checks of bounds. More details of
SyncBB and AFB are given in (Gershman et al.,
2009) and (Hirayama and Yokoo, 1997).
4 EXPERIMENTS
The DCOP algorithms we experiment with are imple-
mented in the FRODO2 toolbox (L
´
eaut
´
e et al., 2009).
Our tests are performed on an Intel Core i5-2400 CPU
with RAM 4GB under Windows 7. Values reported
here are averages of 10 repetitions of the simulation.
4.1 Setup
To test the effectiveness of the DCOP algorithms,
we choose 3 different types of DCOP algorithms, in-
cluding DPOP, AFB and SyncBB. We apply different
algorithms in the two layers, the assignment problem
and the scheduling problem. In order to evaluate the
communication load and simulated time of the three
algorithms, three performance metrics are measured:
total number of messages, total size of messages, and
average simulated time.
We also differ cases concerning the number of
vessels and terminals. We summarize this below:
• Case 1: 3 vessels, 3 terminals, each vessel needs
to visit 3 terminals, 36 variables, 55 constraints;
• Case 2: 5 vessels, 3 terminals, each vessel needs
to visit 3 terminals, 60 variables, 93 constraints;
• Case 3: 7 vessels, 5 terminals, each vessel needs
to visit 3 terminals, 80 variables, 157 constraints.
For each case, we choose 10 different groups of
values for U
k
i j
and W
k
i j
. Thus, we run 30 experiments
in total. The range of the utility value for U
k
i j
and W
k
i j
is arbitrary in our tests, but higher value means higher
priority. In addition, we assume that one terminal can
serve two vessels simultaneously (N
j
= 2).
4.2 Results
4.2.1 Generated Schedule Plan
Based on the solutions we have obtained from the
experiments, we can get the arrival time, departure
time, service time and travel time for each vessel from
variable a
i j
, d
i j
, s
i j
and t
mn
, respectively. Due to space
limitations, here we only present one of the rotation
plans generated using DPOP in both assignment and
scheduling problem in the Case 2 as an example,
which is shown in Figure 2. The figure shows the
rotation plan for 5 vessels, and 3 terminals. In this
figure, different colors represent different terminals.
As we can see, when a vessel does not arrive at the
terminal within the corresponding time window, it has
to wait at the terminal until the next available time
window of the terminal. From this rotation plan, each
vessel operator can determine the sequence in which
to visit the different terminals and exact arrival and
departure time.
4.2.2 Communication Load
Table 1 and Table 2 show the comparison of total
number of messages and size of messages. The
number and size of messages calculated here include
both the inter-agent and intra-agent messages. With
respect to the total number of messages, applying only
the DPOP algorithm results in the lowest number of
VesselRotationPlanning-ALayeredDistributedConstraintOptimizationApproach
171

Table 2: Comparison of the total size of messages for different cases and algorithms (/bytes).
DPOP +
DPOP
AFB +
AFB
SyncBB+
SyncBB
DPOP+
SyncBB
SyncBB+
DPOP
AFB+
SyncBB
SyncBB+
AFB
DPOP+
AFB
AFB+
DPOP
Case 1
*
31,342 139,423 106,323 72,986 65,391 120,949 128,757 142,964 76,057
Case 2
*
5,927,266 726,259 265,855 6,009,593 183,528 471,473 520,641 6,264,379 389,146
Case 3
*
8,926,286 809,437 484,567 8,462,975 2,987,432 575,984 620,453 8,764,275 487,276
* The total size of messages exchanged is the same for the three different tests of the same case.
Table 3: Comparison of average simulated time for different cases and algorithms (/ms).
DPOP+
DPOP
AFB+
AFB
SyncBB+
SyncBB
DPOP+
SyncBB
SyncBB+
DPOP
AFB+
SyncBB
SyncBB+
AFB
DPOP+
AFB
AFB+
DPOP
Case 1
*
61 64 110 86 108 59 115 89 57
Case 2
*
2,352,094 163 343 2,352,130 298 165 341 2,352,114 120
Case 3
*
6,361,192 280 395 6,308,543 354 290 451 6,254,391 357
* The simulated time is the average of calculations based on all three tests for each case.
messages generated in all three cases. The reason is
that the number of messages is linear in the number
of agents and depends on the height of the DFS tree
associated with the problem being modeled (Petcu
and Faltings, 2005b). When the number of variables
and agents increase, the total number of messages
generated increases linearly. For all three cases, AFB
generate the largest number of messages.
However, with respect to the size of messages, the
situation is different. For small size problem as in
Case 1, DPOP has much smaller size of messages
than the others, however, with the increase of agents
and variables, the size of messages for DPOP increase
exponentially, while for AFB and SyncBB, the size
of messages does not increase as significantly as
DPOP as in Case 2 and Case 3. The reason is that
complexity of DPOP is given by the size of the largest
UTIL message it produces, aggregated from the
communication between parent agents and children
agents in the DFS tree, which is exponential in the
induced width of the DFS ordering used. Thus, DPOP
sends out exponentially larger messages (but only a
linear number of them), while the other algorithms
send out an exponential amount of messages but of
only linear size.
4.2.3 Simulated Time
Table 3 shows the simulated time of DCOP algo-
rithms. For smaller cases like Case 1, the simu-
lated time for each algorithm does not differ much.
SyncBB has slightly longer simulated time. However,
with the increase of problem size, in Case 2 and Case
3, DPOP has the longest simulated time in either
the upper layer or the lower layer. For SyncBB and
AFB, the simulated does not have steep increases
as for DPOP. AFB has a shorter simulated time
than SyncBB. This happens because the memory
requirement for DPOP is exponential in the induced
width of the DCOP problem, which depends on the
number of backedges (the links between nodes and
their pseudo-parents) in the DFS tree (Petcu and
Faltings, 2005b). It can be as large as the number
of agents minus one of the constraint graph is fully
connected and every agent is thus constrained with
every other agent. For SyncBB and AFB, the memory
requirements are polynomial in the number of agents.
To conclude, DPOP outperforms AFB and
SyncBB in the total number of messages exchanged.
However, this performance is achieved with a high
increase in message size and simulated time (the
growth of which is exponential in the DFS tree-
width) which makes it inapplicable to DCOPs with
large tree-widths and larger problem sizes. Our
results suggest that SyncBB offers the best tradeoff
between communication load and simulated time on
this problem class. These results seem to indicate
that AFB is not the best suited algorithm for the
VRPP. This could be due to the problem’s variety and
complexity.
5 CONCLUSIONS AND FUTURE
RESEARCH
This paper proposes a new method for solving the
vessel rotation planning problem using a DCOP ap-
proach. We use a non-binary variable representation
to reduce the number of variables and constraints,
and incorportate a layered structure to divide the
main problem into smaller ones and simplify the
complex and hard problem. Three DCOP algorithms
are compared over three different cases. Results
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
172

show that it is possible to verify the effectiveness
and efficiency of DCOP algorithms in the proposed
application.
To take the DCOP approach into application,
the problem size should at least be increased to 22
vessels, 8 terminals. In addition, the constraints from
the perspective of terminal operators should be taken
into consideration for future work.
Although the layered problem solving decreases
computation and communication cost , addressing
the problem in a layered way may lead to finding
sub-optimal solutions. The reason is that some
values are selected for the common variables in the
upper level and these selections may impose extra
constraints on these common variables in the lower
layer DCOPs. Lower layer DCOP then have to
keep previously selected values unchanged. On the
hand, considering the reduction of communication
and computation complexity of the layered approach,
in dynamic situations when DCOP algorithms do
not have enough time to reach the optimal solution,
the benefit of using a layered approach strongly
outweighs its costs drawback.
ACKNOWLEDGEMENTS
This research is supported by the China Scholarship
Council under Grant 201206680009 and the VENI
project “Intelligent multi-agent control for flexible
coordination of transport hubs” (project 11210) of the
Dutch Technology Foundation STW, a subdivision
of the Netherlands Organization for Scientific Re-
search (NWO). The authors would also like to thank
Dr.Thomas L
´
eaut
´
e for his constructive suggestions
regarding FRODO2 toolbox.
REFERENCES
Douma, A. (2008). Aligning the operations of barges and
terminals through distributed planning. PhD thesis,
University of Twente, Enschede, The Netherlands.
Douma, A., Schutten, M., and Schuur, P. (2009). Waiting
profiles: An efficient protocol for enabling distributed
planning of container barge rotations along terminals
in the port of rotterdam. Transportation Research Part
C: Emerging Technologies, 17(2):133–148.
Douma, A., van Hillegersberg, J., and Schuur, P. (2012).
Design and evaluation of a simulation game to
introduce a multi-agent system for barge handling in a
seaport. Decision Support Systems, 53(3):465–472.
Gershman, A., Meisels, A., and Zivan, R. (2009).
Asynchronous forward bounding for distributed cops.
Journal of Artificial Intelligence Research, 34(1):61–
88.
Hirayama, K. and Yokoo, M. (1997). Distributed partial
constraint satisfaction problem. In Proceedings of
the 3rd International Conference on Principles and
Practice of Constraint Programming, pages 222–236.
Springer, Linz, Austria.
Hosseini, S., Samaneh, and Basir, O. A. (2013). Target to
sensor allocation: A hierarchical dynamic distributed
constraint optimization approach. Computer Commu-
nications, 36(9):1024–1038.
L
´
eaut
´
e, T., Ottens, B., and Szymanek, R. (2009).
FRODO 2.0: An open-source framework for dis-
tributed constraint optimization. In Proceedings of
the 21th International Joint Conference on Artificial
Intelligence, pages 160–164, Pasadena, California,
USA.
Li, S., Negenborn, R., and Lodewijks, G. (2014). A
distributed constraint optimization approach for vessel
rotation planning. In Proceedings of the 5th
International Conference on Computational Logistics,
pages 61–80, Valparaso, Chile.
Melis, M., Miller, I., Kentrop, M., Van Eck, B., Leenaarts,
M., Schut, M., and Treur, J. (2003). Distributed
rotation planning for container barges in the port of
rotterdam. Intelligent Logistics Concepts, pages 101–
116.
Modi, P. J., Shen, W.-M., Tambe, M., and Yokoo, M.
(2005). Adopt: Asynchronous distributed constraint
optimization with quality guarantees. Artificial
Intelligence, 161(1):149–180.
Moonen, H., Van de Rakt, B., Miller, I., Van Nunen,
J., and Van Hillegersberg, J. (2007). Agent
technology supports inter-organizational planning in
the port. Managing Supply Chains: Challenges and
Opportunities, pages 201–225.
Petcu, A. (2009). A class of algorithms for distributed con-
straint optimization. PhD thesis,
´
Ecole Polytechnique
F
´
ed
´
erale de Lausanne, Lausanne, Switherland.
Petcu, A. and Faltings, B. (2005a). Approximations in
distributed optimization. In Principles and Practice of
Constraint Programming, pages 802–806. Springer.
Petcu, A. and Faltings, B. (2005b). A scalable method for
multiagent constraint optimization. In Proceedings of
the 19th International Joint Conference on Artificial
Intelligence, volume 5, pages 266–271, Edingurgh,
Scotland.
Rossi, F., Van Beek, P., and Walsh, T. (2006). Handbook of
constraint programming. Elsevier.
Schut, M. C., Kentrop, M., Leenaarts, M., Melis, M., and
Miller, I. (2004). Approach: Decentralised rotation
planning for container barges. In Proceedings of the
16th European Conference on Artificial Intelligence,
pages 755–759, Valencia, Spain.
VesselRotationPlanning-ALayeredDistributedConstraintOptimizationApproach
173
