
The Leap Motion Movement for 2D Pointing Tasks
Characterisation and Comparison to Other Devices
Manuel César Bessa Seixas
1,2
, Jorge C. S. Cardoso
1
and Maria Teresa Galvão Dias
3
1
CITAR/School of Arts, Portuguese Catholic University, Porto, Portugal
2
FEUP, University of Porto, Porto, Portugal
3
INESC TEC/FEUP, University of Porto, Porto, Portugal
Keywords: Interaction Device, Leap Motion, HCI, Pointing Devices, Performance Evaluation, Selection Tasks,
Performance Measurement.
Abstract: In this paper we present the results from an experiment designed to characterize the Leap Motion movement
in 2D pointing tasks and compare it to a mouse and touchpad. We used the ISO 9241-9 multi-directional
tapping test for comparing the devices, and we analyse the results using standard throughput and error rate
measures as well as additional accuracy measures such as target re-entry, task axis crossing, movement
direction change, orthogonal direction change, movement variability, movement offset, and movement
error. We also present the results from the ISO 9241-9 assessment of comfort questionnaire, and our
observations from the participant’s postures when using the Leap Motion device. Results indicate that the
Leap Motion performs poorly in these tasks when compared to a mouse or touchpad.
1 INTRODUCTION
The Leap Motion (LM) controller is a new 3D
sensing device for hand gesture interaction with a
computer. It is capable of sensing the position and
orientation of the fingers of the hands, as well as the
palm orientation and curvature. The LM is a small
device that sits on top of the computer desk and is
operated by positioning the hands over the device.
The controller can be used to point to a computer
screen with a finger or with a tool (a pen or pencil,
for example), or perform other hand gestures. The
LM controller is also integrated in the HP ENVY
17t-j100 Leap Motion QE CTO Notebook PC and in
the HP Leap Motion keyboard.
It is often depicted as a controller for pervasive
and natural user interaction scenarios, allowing new
ways to interact with a computer. Games, music
controllers, 3d modelling, are examples of
applications that have been created with new
interaction paradigms to take advantage of this new
controller. For example Ethereal (Crispy Driven
Pixels Inc., 2014) is a Photoshop add-on that allows
users to draw with their fingers, controlling the
thickness of the line with the distance of the finger
to the screen. Geco MIDI (Uwyn, 2013) is a
software that transforms LM gestures into MIDI
(Musical Instrument Digital Interface) messages for
music composition with any MIDI enabled software.
For example, DJ’s can use it to add special effects in
real-time to the music, by simply waving a hand.
Although not meant to be a replacement of the
mouse, many of the interactions with the LM
involve pointing and selecting targets on a computer
screen.
Many applications in the Leap App Store are
meant to give users various degrees of control over
the computer, from selection and launching
predefined applications and settings to scrolling
content on webpages. Some applications even
emulate the mouse, allowing cursor control and
mouse actions (Lab, 2014; Leap Motion Inc., n.d.;
Nu-Tech, 2014; Touchless, 2014).
Many applications that take advantage of the LM
device still require users to perform typical WIMP
tasks at some point (in many cases giving users the
option of using the mouse or the LM device). For
example, in many games users still need to select
options and activate buttons; some software for
surgery rooms also provides cursor control for
specific functions (Manolova, 2014);
If we assume that the LM device gains
commercial traction and becomes embedded in
additional laptop computers and desktop keyboards,
we must also assume that it will become an
additional alternative to typical WIMP tasks. In a
15
Seixas M., Cardoso J. and Galvão Dias M..
The Leap Motion Movement for 2D Pointing Tasks - Characterisation and Comparison to Other Devices.
DOI: 10.5220/0005206100150024
In Proceedings of the 5th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2015), pages 15-24
ISBN: 978-989-758-084-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

situation where the user is operating the LM device
in a specific LM task it may be faster to perform a
WIMP task also with the LM, instead of moving the
hand to operate the mouse.
However, up until now, there have been no
studies about the performance of the LM device for
2D pointing tasks.
The objective of this work is to provide an initial
assessment of the LM device for 2D pointing tasks
and compare it with a mouse and touchpad. For this,
we have performed an experimental evaluation using
the ISO 9241-9 multi-directional tapping test
(International Organization for Standardization,
2000) for pointing devices and calculated the various
accuracy measures proposed by (MacKenzie,
Kauppinen, & Silfverberg, 2001). We have also used
the ISO 9241-9 assessment of comfort questionnaire
to get a subjective device preference.
The contributions of this paper are:
Characterization of the LM movement for
pointing tasks in terms of the accuracy
measures proposed by Mackenzie;
Comparison of the LM movement and
performance with the mouse and touchpad
devices;
An assessment of the subjective preferences
and comfort of the LM device;
An analysis of the postures adopted by users
of the LM device.
2 RELATED WORK
2.1 The Leap Motion Device
The LM is a small input device controller (7.6 x 3 x
1.3 cm) developed by Leap Motion Inc., which
detects and recognizes users’ hands posture and
gestures (Figure 1).
Figure 1: The Leap Motion device.
Programmers can use the Leap Motion SDK
(available for C++, Java, Objective-C, C#, Python,
Javascript, and other programming languages) to
develop applications that take advantage of the
device’s capabilities. Currently, the SDK provides
high-level functions such as:
Presence/absence of hands within the range of
the LM, and their 3D position in space.
Orientation of the palms.
Curvature of the palms.
Overall scale, rotation, and translation motions
calculated from the movement of the hands.
Orientation of individual fingers (or tools such
as pencils), and normalized 2D pointing
position on the screen.
Pre-defined gestures such as a finger tracing a
circle, finger swipe, finger tapping movement,
and screen tap.
Applications developed for the LM can be
distributed via the Airspace store (Leap Motion Inc.,
2014), an online store from which users may
download applications to use with their device.
Several applications are currently available, from
games to productivity applications.
The LM driver software does not directly
support user interaction with the Operating System
(OS), but several applications in the Airspace store
provide this capability. Touchless (Leap Motion
Inc., n.d.), is an example of such applications,
developed by Leap Motion Inc., with versions for
Mac and Windows computers. Touchless provides
several ways to interact with the OS:
By pointing with a finger, users can control
the position of the mouse cursor on the screen.
By making a screen tap gesture (i.e., moving
the finger towards the screen quickly), users
can perform a mouse click.
By swiping multiple fingers in the air, users
can scroll horizontally or vertically.
By pinching the fingers, users can zoom in
and out.
2.2 Performance Evaluation of Input
Devices
The most common evaluation measures for input
devices are speed, accuracy, and throughput. Speed,
or its inverse, movement time (MT), is the time it
takes to select a target. Accuracy, usually reported as
an error rate, is the number of target selections with
the pointer outside the target over the total number
of target selections. Throughput is a composite
measure, expressed in bits per second, and derived
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
16

from the movement time, target size, and distance to
the target:
ID
e
is the effective index of difficulty, expressed
in bits, and calculated from the distance to the target
(D) and the effective width of the target (W
e
):
log
1
W
e
is calculated from the distribution of target
selection coordinates over a sequence of trials as
4.133∗
, where SD
x
is the standard
deviation of the selection coordinates measured
along the axis of approach to the target.
To help in testing the efficiency of input devices
the ISO standard 9241 part 9, “Ergonomic design for
office work with visual display terminals (VDTs) -
Requirements for non-keyboard input devices”
provides guidelines for testing and comparing
pointing input devices. One of the tests proposed in
the ISO standard is the multidirectional tapping test
used to evaluate pointing movements in many
different directions. In this test participants are
required to move the cursor across a circle to
sequentially numbered targets (see Figure 2). The
targets (for example, squares, or circles) are equally
spaced around the circumference of the circle and
the sequence of targets to select is such that the
movements are nearly equal to the diameter of the
circle.
Figure 2: Multidirectional tapping test task.
ISO 9241-9 also provides subjective measures to
assess the comfort and effort using the device. One
of the questionnaires provided is an independent
rating scale with 12 questions that users rate in a 1 to
5 scale:
1. Force required for actuation (very
uncomfortable - very comfortable)
2. Smoothness during operation (very rough - very
smooth)
3. Effort required for operation (very high - very
low)
4. Accuracy (very inaccurate - very accurate)
5. Operation speed (unacceptable – acceptable)
6. General comfort (very uncomfortable - very
comfortable)
7. Overall operation of the input device (very
difficult (to use) - very easy (to use))
8. Finger fatigue (very high - very low)
9. Wrist fatigue (very high - very low)
10. Arm fatigue (very high - very low)
11. Shoulder fatigue (very high - very low)
12. Neck fatigue (very high - very low)
2.2.1 MacKenzie’s Accuracy Measures
(MacKenzie et al., 2001) proposed a set of seven
accuracy measures for pointing devices that can
complement the most common measure of
throughput. The new measures proposed are Target
Re-entry (TRE), Task Axis Crossing (TAC),
Movement Direction Change (MDC), Orthogonal
Direction Change (ODC), Movement Variability
(MV), Movement Error (ME), and Movement Offset
(MO). These measures capture aspects of the
movement during a trial.
Figure 3: Graphical illustration of TRE, TAC, MDC, and
ODC accuracy measures.
TRE measures the number of times the pointer
enters the target region (area of the target), leaves it
and re-enters again.
Figure 3 illustrates a target
selection with a TRE of two.
TAC measures the number of times the pointer
crosses the task axis (a straight line from the initial
pointer's position to the centre of the target).
MDC measures the number of times the
pointer’s trajectory changes direction relatively to
the task axis. For example, in
Figure 3, there are three
changes in the movement direction.
ODC is similar to Movement Direction Change.
It measures the number of times the pointer’s
1
2
3
4
5
9
1
3
1
4
1
5
1
6
6
7
8
1
0
1
1
1
2
Target re-entry (TRE)
Task axis crossing (TAC)
Movement direction change (MDC) Orthogonal direction change (ODC)
TheLeapMotionMovementfor2DPointingTasks-CharacterisationandComparisontoOtherDevices
17
trajectory changes direction along a perpendicular
axis to the task axis. In Figure 3, there are four
changes.
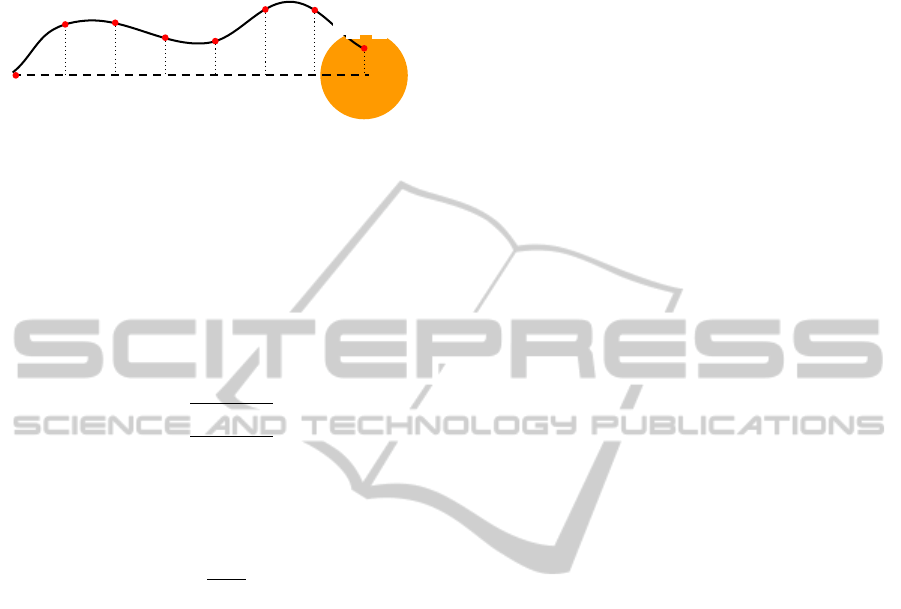
Figure 4: Path sampling.
MV is the standard deviation of the distances of
the sample cursor positions to the task axis. It
represents the extent to which the cursor positions
lie in a straight line along an axis parallel to the task
axis. Considering the task axis is transformed so that
it is equal to y = 0 (see Figure 4), y
i
is the distance
between a sample cursor position and the axis, is
the mean distance of the sample cursor positions to
the axis, and n is the number of sample positions:
MV
∑
1
ME is the average deviation of the sample cursor
positions from the task axis, irrespective of whether
the points are above or below the axis. If the task
axis is y = 0, then:
∑|
|
MO is the mean deviation of the sample cursor
to the task axis. If the task axis is y = 0, then:
2.3 Leap Motion Studies
(Weichert, Bachmann, Rudak, & Fisseler, 2013)
analysed the accuracy and robustness of the leap
motion controller. They performed an experiment
where a robotic arm would hold a pen in its hand
and was programmed to place the tip in several real
world known positions. These positions would then
be compared to the ones acquired by the LM
controller, being the difference between each other
the precision. These measures were repeated several
times in order to find repeatability, for two cases:
static and dynamic (with a moving pen). They found
the accuracy of the LM to be less than 0.2mm for the
static case and less than 1mm for the dynamic case.
Weichert et al. focused on the accuracy of device
itself; in this paper we focus on the accuracy of the
user performing a task with the device.
(Vikram, Li, & Russell, 2013) present a new
type of user input for writing, using the LM. Using
the finger position data from the LM they are able to
identify characters and words written “in the air”.
They propose an algorithm that is capable of
recognizing gestures without pen down/pen up
gestures to mark the beginning and end of a gesture.
Although their interaction technique relies on users
performing finger gestures, their analysis is
concerned with the gesture recognition algorithm. In
this paper, we address the issue of the performance
of doing the gestures (for simple pointing tasks).
(Nabiyouni, Laha, & Bowman, 2014) performed
a usability testing in order to find which of the
implemented 3D travel techniques was the most
efficient in bare-hand interaction. Five techniques
were tested in a set of 3 tasks and the interaction was
performed through the use of the LM controller. The
techniques developed were based on a “Camera-in-
hand” metaphor, where the Leap Motion workspace
was directly mapped to the virtual world, and an
“Airplane” metaphor, that, similar to driving a
vehicle, had the camera always moving
straightforward being the user responsible for
controlling its velocity and orientation (the
orientation was the same as the hand). A 3D virtual
scenario, modelled as a city, was used to perform the
tests. This is an example of a task that is out of the
scope of our evaluation since it uses LM-specific
features that are outside of the WIMP paradigm.
(Manolova, 2014) describes a system for
touchless interaction with medical images in surgery
rooms using the LM device. Surgeons could
manipulate image data using the open source
Medical Imaging Toolkit (MITO). The system
provided several functions such as scaling, zooming,
and rotating, but also allowed the operator to
manipulate the imaging software with traditional
WIMP tasks: “When the operator pointed one or two
fingers towards the screen, the system drew a cursor
on the screen so that the operator could point items
or buttons in the imaging software, and when the
operator moved the finger farther towards the
screen, the pointed item was selected (similar to a
mouse click)” (Manolova, 2014, p. 5). This is the
type of interaction that is the focus of the current
paper: applications that take advantage of the LM’s
gesture recognition for non WIMP interactions but
that also allow the user to use the LM as a standard
mouse, avoiding the use of a separate device
(mouse) to control the software’s functions.
3 EXPERIMENT
The experiment was a 3 × 5 × 8 within-subjects
factorial design:
(x
0
,y
0
)
(x
1
,
y
1
)
(x
2
,y
2
)
(x
3
,y
3
)
(x
4
,y
4
)
(x
n-1
,y
n-1
)
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
18

Device {Mouse, Touchpad, LeapMotion}
Sequence {1,2,3,4,5}
Block {1,2,3,4,5,6,7,8}
We configured the multi-directional tapping test
with 16 circular targets, each with 13mm, in a
circular layout with diameter of 180mm. The
nominal index of difficulty used was 3.8 bits. The
experiment was structured in “sequences” and
“blocks.” A sequence corresponded to 15 target
selections (corresponding to a complete screen in the
multidirectional tapping test – the first target did not
count as it served only to start the sequence). A
block had 5 sequences. Twelve participants were
randomly assigned to one of three groups (4
participants/group). Each participant was tested with
all devices. The order of devices differed for each
group and was fully counter-balanced.
For testing the LM device, we used the
Touchless application, which emulates mouse
movement and mouse button presses, so the same
software was used to collect device movement data
for all three devices, at 40 samples per second.
At the beginning of the experiment we explained
to participants the purpose of the experiment, the
task to be performed, and the devices to be used. We
also asked participants to fill in a questionnaire to
determine the participant’s computer literacy and
experience with the devices. Age and gender were
also asked.
We asked participants to perform the selection
task as fast as possible without exceeding one error
per sequence. Participants were allowed to perform
practice trials until they felt ready to start the
experiment. Participants used their preferred hand to
operate the devices. Participants were also informed
to take a break between sequences, if they so
desired.
During the experiment, we observed and took
notes about the participant’s posture operating the
devices. At the end of each device’s trials we asked
participants to fill in the 12 item ISO 9241-9 comfort
and effort questionnaire. At the end, we asked
participants to tell us which device they preferred
best and which device they disliked the most. The
experiment lasted about 1 hour and 15 minutes.
3.1 Participants
Twelve non-paid participants (9 male, 3 female)
were recruited. Their ages ranged from [21-25] to
[56-60] years old (see Table 1). All participants were
daily computer users. Most participants used the
computer mouse every day (2 used the mouse only
often and seldom). 6 participants used the touchpad
Table 1: Age distribution of participants.
Age interval Frequency
[21-25] 1
[26-30] 3
[31-35] 5
[36-40] 1
[41-45] 1
[46-50] 0
[51-55] 0
[56-60] 1
every day, 3 used it often, 2 seldom, and 1 used
didn't use it at all. The Leap Motion was a novel
device for 7 participants, but the other 5 had already
tried it (but did not use it regularly).
3.2 Apparatus
We used the following hardware and software:
Apple Mac Mini (2.5GHz Intel Core i5, with
4GB RAM), running Mac OS X 10.8.3;
HP L1706 LCD Display, with resolution set to
1280 x 1024;
Genius Xscroll USB mouse, with the tracking
speed set to third tick mark in Mac OS X
mouse configuration panel in System
Preferences;
Apple Magic Trackpad, with the tracking
speed set to the fourth tick mark, in Mac OS X
trackpad configuration panel in System
Preferences;
Leap Motion device (commercial version),
with tracking priority set to "Balanced",
version 1.2.1+10992;
The Touchless for Mac software (Leap
Motion Inc., n.d.), version 1.0.9.8404;
A software that implements the multi-
directional tapping test and collects data
(Cardoso, 2014);
4 RESULTS AND DISCUSSION
Raw data from the experiment and R (R Core Team,
2014) analysis scripts are available at (Cardoso &
Seixas, 2014).
4.1 Movement Time, Throughput, and
Error Rate
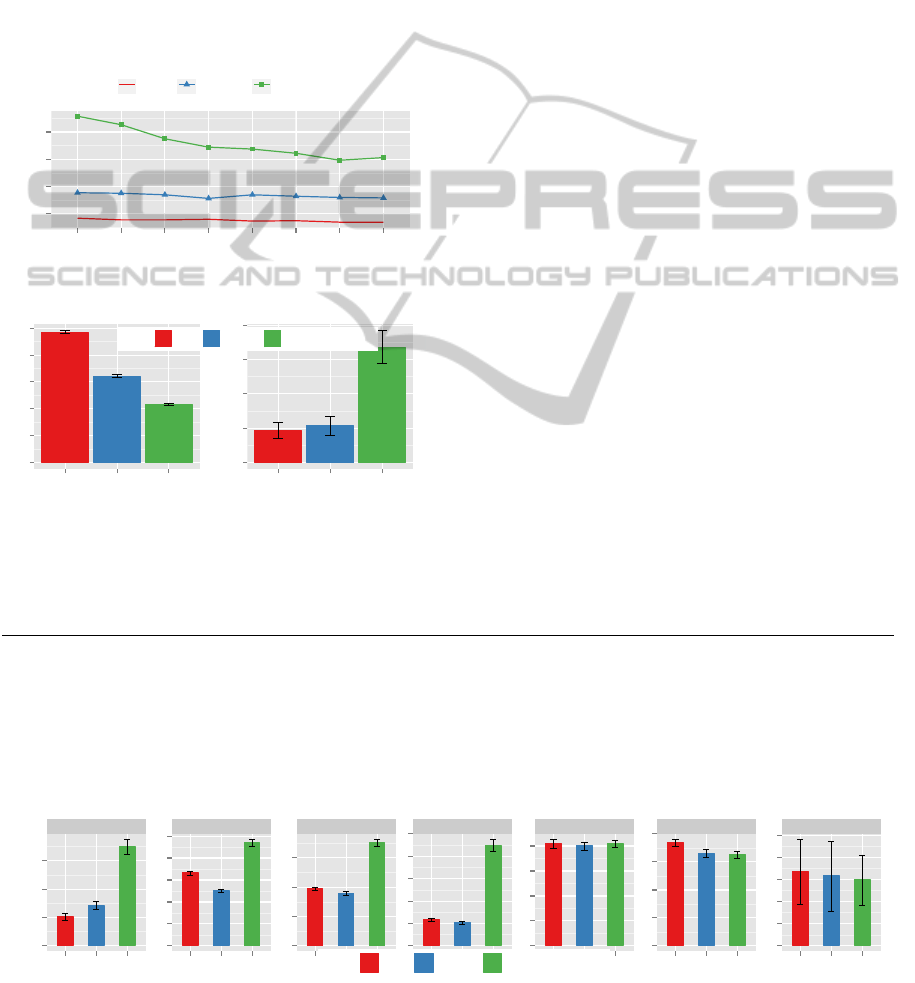
Figure 5 shows the movement time (in seconds) as a
function of block.
To estimate the learning effect, we ran pairwise
TheLeapMotionMovementfor2DPointingTasks-CharacterisationandComparisontoOtherDevices
19
t-tests for average throughput per block (considering
all devices) with a significance level of 5%.
The results indicate a clear learning effect in
blocks 1 to 3, but also indicate a significant different
between blocks 6 and 7, suggesting that there was
still some learning effect after block 6. However, in
our following analysis we discard only blocks 1 to 3,
since those represent the most significant learning
effect.
It is obvious that the LM device performs poorly
in terms of movement time when compared to the
mouse or touchpad. Participants needed more than
twice as much time to successfully select a target
Figure 5: Movement time as a function of block.
Figure 6: Throughput and error rate.
with the LM than with a mouse.
Throughput for the mouse and touchpad (Figure
6) are consistent with previously reported values
(MacKenzie et al., 2001).
Throughput and error rates confirm that, in this
experiment, the LM performed poorly. The
throughput of the LM is comparable to the
throughput of the joystick in (MacKenzie et al.,
2001). Error rate for the LM was about 3 times
larger than the error rate for the mouse or touchpad,
suggesting also that it is more difficult to select a
target with the LM than with a mouse, or touchpad.
4.2 Mackenzie’s Accuracy Measures
The Mackenzie’s accuracy measures (Table 2 and
Figure 7) allow us to see the differences between the
LM and the mouse/touchpad with greater detail.
Table 2 shows the means, standard deviations,
and F statistic for all accuracy measures. Analysis of
variance indicates that there are significant
differences between devices for all measures except
MV and MO.
The most obvious differences are in the TRE,
TAC, MDC, and ODC measures, with the LM
showing more path events in all measures.
This indicates that the LM movement is more
variable than the mouse or touchpad movement in
terms of direction changes. However, the overall
movement variability, error, and offset are similar
for all devices.
In part, these results may be explained by our
choice of mechanism for selecting a target with the
Table 2: Means and standard deviations of accuracy measures for each device.
Mouse Touchpad Leap Motion
Accuracy measure Mean SD Mean SD Mean SD F
Target re-entry (TRE) 0.10 0.09 0.14 0.12 0.35 0.21 203***
Task axis crossing (TAC) 1.66 0.37 1.26 0.32 2.35 0.62 367***
Movement direction change (MDC) 4.86 0.96 4.48 1.15 8.78 2.43 521***
Orthogonal direction change (ODC) 1.19 0.59 1.04 0.55 4.50 2.18 528***
Movement variability (MV) 20.52 6.88 20.05 6.81 20.47 6.24 0.38
Movement Error (ME) 18.41 5.27 16.55 5.24 16.27 5.33 12.1***
Movement Offset (MO) -1.68 5.93 -1.58 6.36 -1.49 4.59 0.07
Figure 7: Accuracy measures for the three devices.
●
● ●
●
●
●
●
●
1.0
1.5
2.0
2.5
12345678
Block
MovementTime
Device
●
Mouse Touchpad LeapMotionTouchless
0
1
2
3
4
5
Throughput
BPS
0
2
4
6
8
ErrorRate
Percent.(%)
Device Mouse Touchpad LeapMotionTouchless
TRE TAC MDC ODC MV ME MO
0.0
0.1
0.2
0.3
0.0
0.5
1.0
1.5
2.0
2.5
0.0
2.5
5.0
7.5
0
1
2
3
4
5
0
5
10
15
20
0
5
10
15
20
0.0
0.5
1.0
1.5
2.0
2.5
Mean
Device Mouse Touchpad LeapMotionTouchless
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
20

Figure 8: Average scores for the various comfort questions.
LM. With the Touchless application, a mouse click
is emulated with a “screen tap” gesture: a quick
movement of the pointing finger towards the screen.
This movement is not easy to accomplish and may
result in a considerable motion of the pointer on the
screen. This may explain the large differences in
some of the accuracy measures: some of the
movement errors may occur during the final screen
tap gesture. Further analysis of the data is required
to determine in which part of the movement path
these differences occur.
4.3 Effort and Comfort
We also collected subjective device preferences and
comfort through the ISO 9241-9 assessment of
comfort questionnaire. Figure 8 shows the average
scores for each question. Again the LM device is
rated poorly, having the worst rates in all questions.
In seven of the twelve questions, the LM receives a
negative average score (below 3), with the worse
classifications in the “arm fatigue”, “effort required
for operation”, and “general comfort”, with average
scores below 2.5.
4.4 Posture Observations
During the experiment, we took notes regarding the
postures adopted by the participants while using the
LM device.
The common position (see Figure 9) taken by
participants was backs against the chair, straight, or
slightly curved to the front. The index finger of the
Figure 9: Two often observed poses. Left: auxiliary hand
resting; right: auxiliary hand supporting the head.
dominant hand was responsible for controlling the
pointer movement. The other fingers were hidden in
order to not to activate other functions of the
application (like the scroll function).
Some participants would leave the thumb
showing which sometimes caused the software to
perform unintended clicks with the thumb. The
auxiliary hand would remain quiescent on the table,
over the participant’s legs, or supported on the
chair's arm. Frequently, the participant would place
his/her elbow on the table and support their heads on
the auxiliary hand.
4.4.1 Gorilla Arm
One of the problems detected in the posture was that
participants had to keep their dominant upper limb
suspend in the air. After a while, this caused the
participant to start feeling discomfort and the
necessity to make a pause.
Figure 10: Gorilla arm effect. Dominant arm extended for
long periods caused discomfort and a feeling of heavy
arm.
In the end, those who perform the experiment
with their dominant upper limb suspended in air, no
matter how many pauses they took, felt pain in their
arm.
This is a similar problem faced by vertical touch
F
o
r
c
e
.
r
e
q
u
i
r
e
d
.
f
o
r
.
a
c
t
u
a
t
i
o
n
S
m
o
o
t
h
n
e
s
s
.
d
u
r
i
n
g
.
o
p
e
r
a
t
i
o
n
E
f
f
o
r
t
.
r
e
q
u
i
r
e
d
.
fo
r
.
o
p
e
r
a
t
i
o
n
A
c
c
u
r
a
c
y
O
p
e
r
a
t
i
o
n
.
S
p
e
e
d
G
e
n
e
r
a
l
.
c
o
m
fo
rt
O
v
e
r
a
l
l
.
o
p
e
r
a
t
i
o
n
.
o
f
.
i
n
p
u
t
.
d
e
v
i
c
e
F
i
n
g
e
r
.
fa
t
i
g
u
e
W
r
i
s
t
.
f
a
t
i
g
u
e
A
r
m
.
fa
t
i
g
u
e
S
h
o
u
l
d
e
r
.
f
a
t
i
g
u
e
N
e
c
k
.
f
a
t
i
g
u
e
1
2
3
4
5
Average score
Device Mouse Touchpad LeapMotion
TheLeapMotionMovementfor2DPointingTasks-CharacterisationandComparisontoOtherDevices
21

screens, where the arm is held in unsupported
horizontal position (see Figure 10), leading to
fatigue and pain. This is often described as the
“gorilla arm” effect because the arm starts to feel
very heavy over time. Sometimes this
discomfort/pain would extend to the shoulders, neck
and back.
4.4.2 Hand Pose
We also observed that participants had to keep their
index finger under tension to keep it extended in
order to have control over the pointing motion. Over
time, stress and fatigue would appear and as the
experiment proceeded, this would end up in pain.
Even after a short pause, the finger fatigue would
not go away and, as a natural response, the finger
would start to relax (see Figure 11). This resulted in
a loss of precision: when the finger approached the
touch zone to perform a click, the pointer would
sometimes move outside the target area and trigger
an error click.
Figure 11: Finger poses. Left: finger completely extended
and in tension; right: fatigue causes finger to relax.
Tension was also required when trying to point
very precisely at a point and forcing the hand to
remain motionless. Long periods of tension would
result in the same consequences of physical stress.
One other aspect related to the fingers is that most of
them (more than three) must remain hidden
otherwise a different function of the Touchless
would be activated (one example is the scroll
function). Keeping the fingers hidden is also a
demanding effort.
Some participants would prefer to leave their
thumb in a relaxed position (hiding it would cause
some discomfort and pain after a while). While
acceptable, it could be one more cause of an
erroneous click because the thumb itself would
sometimes register a click. This second click would
count as an erroneous selection of the next target.
Also one of the problems of going too far in the
touch zone is that the device might lose the tracking
of the controlling finger. When this happened, the
device would look for another finger. This made the
pointer onscreen jump to a different position,
sometimes more than once.
One of the participants practiced high
performance sports and joked that the LM evaluation
seemed like one of the exercises he/she used to do.
This participant was the fastest to perform the
evaluation, probably due to his/her physical
conditions.
4.4.3 Device Position
During the experiment, some participants would
attempt to reposition the LM device closer or farther
away from them, in an attempt to place their elbows
on the table and achieve some comfort - Figure 12.
Figure 12: Elbow supported on table. Left: hand at a high
position with finger pointing straight at the screen; right:
as hand goes down users have tendency to point down.
This led to a reduction in the performance, as
participants took longer to perform a successful
click, and an increase in the number of times the
device lost tracking. The trajectory performed by the
hand when the elbow is static is an arc, which
caused some participants to end up pointing down at
the table. In this situation, the device is sometimes
unable to track the finger and the cursor position is
lost.
Several participants also commented that if the
LM device was in a lower position, the elbows could
be more easily supported on the table and the hands
wouldn't have to move so high.
4.4.4 Final Remarks
In terms of selecting targets, participants remarked
that the lower targets were the hardest to select. One
of the causes of this could be that the LM tracking
volume is an inverse pyramid, which means that
there is a smaller detection range at the bottom.
In some cases, when moving the finger up or
down, participants would unintentionally get trigger
a click because the movement was not perfectly
vertical and crossed the screen tap gesture threshold.
This would lead to wrong clicks and frustration. We
did not notice this happening on left-to-right or
right-to-left movements.
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
22

One participant completed all the trials with the LM
without reporting feeling any pain. The participant
supported her elbows on the table and used her
thumb to move the pointer and perform the clicks
(the index finger was hidden – see Figure 13). Due
to the participants’ constitution, she was able to find
a comfortable position, able to reach every target
without raising his/her elbows. The downside is that
the finger tracking failed several times.
Figure 13: Using the thumb to point.
Finally, some participants with injuries like
tendinitis, or with back problems, had greater
difficulty performing the experiment and were
unable to complete it.
5 CONCLUSIONS
We have presented the results from an experiment
designed to characterize the Leap Motion movement
on 2D pointing tasks. Results indicate that the Leap
Motion performs poorly when compared with a
mouse or touchpad, not only in performance but also
in user fatigue and comfort.
The results seem to indicate that the LM device
is not appropriate for lengthy, or high performance
(selection) operations.
However, these results must be interpreted with
care. We believe that in a great part, these results
reflect the novelty of the LM. One the one hand, the
software to make use of the LM may not be fully
matured. For example, the Touchless application
maps the finger tip position to a screen position, it
does not take into account the finger pointing
direction, which could potentially result in faster
pointing movements. The results in this paper should
be taken as a basis to develop and test additional
techniques for pointing with the LM, so that more
efficient software becomes available.
On the other hand, there are no standard
operation posture guidelines for long-term use of the
LM device. We noticed that even after some practice
trials, users were still trying to determine the best
way to position their hands, arms, elbows, etc., to
use the device. While posture may not be very
important for short-term operation, it impacts
efficiency if users have to operate the LM for long
periods of time. The results of this study should lead
to more study on the ergonomics for the LM device,
so that optimal positioning of the device and user’s
limbs can be determined.
Additionally, the comparison between the LM,
the mouse, and the touchpad is not totally fair. Both
the mouse and the touchpad use non-linear mapping
between device displacement and cursor
displacement: faster movements translate to greater
cursor displacement. This does not happen with the
Touchless application. It may be worth investigating
whether similar techniques can be applied to the LM
device, even if only in particular situations.
It is also important to note that this experiment only
evaluates the LM device for target selection
operations; it does not address many of the other
types of interaction tasks that the LM allows.
ACKNOWLEDGMENTS
This paper was financially supported by the
Foundation for Science and Technology — FCT —
in the scope of project PEst-OE/EAT/UI0622/2014.
We would like to thank all the participants in this
experiment for their time and collaboration.
REFERENCES
Cardoso, J. C. S. (2014). Leap motion study source code.
Retrieved from https://github.com/jorgecardoso/
leapmotionstudy.
Cardoso, J. C. S., & Seixas, M. (2014). Leap Motion
experiment raw data and analysis scripts - UCP.
doi:10.6084/m9.figshare.1104376.
Crispy Driven Pixels Inc. (2014). Ethereal. Retrieved June
25, 2014, from https://airspace.leapmotion.com/apps/
ethereal/weblink.
International Organization for Standardization. (2000).
Ergonomic Requirements for Office Work with Visual
Display Terminals (VDTs): Requirements for non-
keyboard input devices (Vol. 2000, p. 55). ISO.
Retrieved from http://www.iso.org/iso/home/store/
catalogue_ics/catalogue_detail_ics.htm?csnumber=30
030.
Lab, P. (2014). Pointable. Retrieved December 06, 2014,
from https://apps.leapmotion.com/apps/pointable/
windows.
TheLeapMotionMovementfor2DPointingTasks-CharacterisationandComparisontoOtherDevices
23

Leap Motion Inc. (n.d.). Touchless for Mac. Retrieved
from https://airspace.leapmotion.com/apps/touchless-
for-mac/osx.
Leap Motion Inc. (2014). Airspace store. Retrieved from
https://airspace.leapmotion.com/
MacKenzie, I. S., Kauppinen, T., & Silfverberg, M.
(2001). Accuracy measures for evaluating computer
pointing devices. In Proceedings of the SIGCHI
conference on Human factors in computing systems -
CHI ’01 (pp. 9–16). New York, New York, USA:
ACM Press. doi:10.1145/365024.365028.
Manolova, A. (2014). System for touchless interaction
with medical images in surgery using Leap Motion. In
Proceedings og the 9th INTERNATIONAL
CONFERENCE on Communications, Electro-
magnetics and Medical Applications. Sofia, Bulgaria.
Nabiyouni, M., Laha, B., & Bowman, D. A. (2014).
Poster: Designing Effective Travel Techniques with
Bare-hand Interaction. In EEE Symposium on 3D User
Interfaces (3DUI). Center for Human - Computer
Interaction and Department of Computer Science,
Virginia Tech. Retrieved from http://people.cs.vt.edu/
blaha/docs/Poster - Designing Effective Travel
Techniques with Bare-hand Interaction.pdf.
Nu-Tech. (2014). Mudra Mouse. Retrieved December 06,
2014, from https://apps.leapmotion.com/apps/mudra-
mouse/osx.
R Core Team. (2014). R: A Language and Environment
for Statistical Computing. Vienna, Austria. Retrieved
from http://www.r-project.org.
Touchless. (2014). AirInput. Retrieved December 06,
2014, from https://apps.leapmotion.com/apps/
airinput/osx.
Uwyn. (2013). GECO MIDI. Retrieved June 25, 2014,
from http://uwyn.com/geco/
Vikram, S., Li, L., & Russell, S. (2013). Handwriting and
Gestures in the Air, Recognizing on the Fly. CHI 2013
Extended Abstracts, ACM 978-1-.
Weichert, F., Bachmann, D., Rudak, B., & Fisseler, D.
(2013). Analysis of the accuracy and robustness of the
leap motion controller. Sensors (Basel, Switzerland),
13(5), 6380–93. doi:10.3390/s130506380.
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
24
