
Automatic Fall Risk Estimation using the Nintendo Wii Balance Board
Gert Mertes
1,2,3
, Greet Baldewijns
1,2,3
, Pieter-Jan Dingenen
1
, Tom Croonenborghs
1,4
and Bart Vanrumste
1,2,3
1
KU Leuven, Campus Geel, AdvISe, Geel, Belgium
2
KU Leuven, ESAT-STADIUS, Leuven, Belgium
3
iMinds Medical Information Technology Department, Ghent, Belgium
4
KU Leuven, Department of Computer Science, DTAI, Heverlee, Belgium
Keywords:
Wii Balance Board, Center of Pressure, Fall Risk Classification, Machine Learning, Support Vector Machine,
K-Nearest Neighbours.
Abstract:
In this paper, a tool to assess a person’s fall risk with the Nintendo Wii Balance Board based on Center of
Pressure (CoP) recordings is presented. Support Vector Machine and K-Nearest Neighbours classifiers are
used to distinguish between people who experienced a fall in the past twelve months and those who have
not. The classifiers are trained using data recorded from 39 people containing a mix of students and elderly.
Validation is done using 10-fold cross-validation and the classifiers are also validated against additional data
recorded from 12 elderly. A cross-validated average accuracy of 96.49% ± 4.02 is achieved with the SVM
classifier with radial basis function kernel and 95.72% ± 1.48 is achieved with the KNN classifier with k = 4.
Validation against the additional dataset of 12 elderly results in a maximum accuracy of 76.6% with the linear
SVM.
1 INTRODUCTION
A third of all older persons aged 65 or older fall at
least once a year (Milisen et al., 2004), (Robertson
and Gillespie, 2013). Approximately 10% of these
fall incidents result in serious injuries. Moreover, 7%
of emergency room visits are due to fall incidents
(Tinetti, 2003).
Fall incidents, however, not only result in physio-
logical injuries but also have an impact on the psy-
chological health of the person that fell. After all,
fall incidents can lead to fear of future falls which
in turn can cause the elderly to move less and there-
fore spend more time indoors (Tinetti and Williams,
1998), (Milisen et al., 2004), (Noury et al., 2008).
The resulting isolation and lack of exercise can in turn
reduce the muscle strength of the older person which
causes an increase of the fall risk. Preventing fall inci-
dents would therefore not only contribute to reducing
fall related health care costs, but would also greatly
contribute to the quality of life of older persons.
When an elevated fall risk can be detected at an
early stage, preventive measures can be taken to re-
duce this risk and hence reduce the number of fall in-
cidents. These possible measures include an adapta-
tion of the medication regime or the implementation
of an exercise programme. The home environment
of the older person could furthermore be adapted to
further reduce the risk (e.g.: removing loose carpets,
installing new light fixtures, etc.).
To date several methods to assess the fall risk of
a person such as the Timed-get-Up-and-Go (TUG)
test (Martin, 2011), (Podsiadlo and Richardson, 1991)
and the Tinetti Mobility test (Tinetti et al., 1986) al-
ready exist.
During the TUG test, the elderly is asked to rise
from a chair, walk three meters, turn around, return to
the chair and sit down. The fall risk is subsequently
quantified using the manually recorded time to com-
plete the test combined with the observations of the
health care professional (e.g.: visible shuffling, pos-
ture during the walk, etc.). Typically, the elderly is
considered at risk when the time needed to complete
the test exceeds 14 seconds or if the person has a very
unstable gait pattern (Large et al., 2006).
The Tinetti test in turn evaluates a person’s bal-
ance and gait using a series of exercises. Balance is
evaluated using nine exercises including, among oth-
ers, standing up from a chair and the ability to with-
stand a nudge to the chest. Gait is evaluated by ob-
75
Mertes G., Baldewijns G., Dingenen P., Croonenborghs T. and Vanrumste B..
Automatic Fall Risk Estimation using the Nintendo Wii Balance Board.
DOI: 10.5220/0005208700750081
In Proceedings of the International Conference on Health Informatics (HEALTHINF-2015), pages 75-81
ISBN: 978-989-758-068-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

serving the older person’s step length, step symmetry,
walking stance, etc. Each exercise is observed and
subsequently graded on a scale of 0 to 2 after which
the grades are summed into a final score. A score be-
low a certain threshold (19 out of 28 points) indicates
a balance or gait problem (Tinetti et al., 1986).
Other tests include the Four Test Balance Scale
(Gardner et al., 2001), the Functional Reach test as
described by (Duncan et al., 1992), the Five Times Sit
to Stand Test proposed by (Guralnik et al., 1995), the
Berg Balance Scale developed by (Berg et al., 1989)
and the Balance Evaluation Systems Test by (Horak
et al., 2009). While providing insight in a person’s
balance, all of the previously mentioned tests require
specialised personnel to perform the test. Further-
more, these tests are mostly administered when a fall
incident has already taken place and are therefore not
always useful in preventing future falls.
The aim of the presented study is therefore the de-
velopment of an easy to use tool which can detect an
elevated fall risk at an early stage without the inter-
vention of a health care professional. The tool will
make it possible for informal care givers (e.g.: chil-
dren or neighbours of the older person) to have an
early assessment of the fall risk of their care receiver.
If the tool shows an elevated fall risk, a more in depth
assessment of the causes of this detected risk should
be initiated by a health care professional which can be
followed by the installation of preventive measures.
For this purpose, a system using a force plate is
presented. In recent years, force plates have gained
popularity as a way to measure a person’s balance.
Force plates offer the advantage of being able to
quickly measure a person’s balance without requir-
ing specialised personnel. (Melzer et al., 2004) found
that it is possible to discriminate between elderly who
have recently experienced falls and non-falling el-
derly persons using parameters of mediolateral (ML)
sway extracted from the Center of Pressure (CoP)
trajectory. (Piirtola and Era, 2006) reviewed nine
prospective studies where force platform measure-
ments have been used as predictors of falls among
elderly people. They found that in five studies, fall-
related outcomes were associated with features mea-
sured with the force platform. These systems, how-
ever, use expensive force plates which are not acces-
sible for regular care givers.
The system proposed in this paper uses a cheap
alternative for these force plates namely the Nintendo
Wii Balance Board (Wii BB). The Wii BB can be used
by care givers to quickly and automatically estimate
if a person is at risk of falling and is, due to the pop-
ularity of the Wii console, currently already present
in a lot of homes. Compared to current classification
methods, e.g. the TUG, and previous studies, our sys-
tem does not require trained personnel, no manual in-
terpretation of the data is required and no expensive
equipment needs to be present.
Fifty-one participants were asked to stand on the
Wii BB for 40 seconds while the pressure on the sen-
sors was sampled. The pressure measured on the
force plate is used to calculate the CoP trajectory.
Features are subsequently extracted from the CoP tra-
jectories and used to automatically classify if a person
is at risk for falling.
In the remainder of the paper the data acquisi-
tion, preprocessing, feature extraction and classifica-
tion methods using the data of the participants is pre-
sented in section 2. This is followed by a results
section in which the classification results of a Sup-
port Vector Machine (SVM) and k-Nearest Neigh-
bours (KNN) classifier are presented. These results
are subsequently discussed in depth in section 4. Fi-
nally we conclude that a good classification can he
reached using both the SVM as the KNN classifier.
2 METHODS
2.1 Dataset
2.1.1 Wii Balance Board
The Wii Balance Board is a game controller devel-
oped by Nintendo and introduced in 2007 for the Wii
video game console. It ships with the game Wii Fit
in which users are required to do exercises with or
around the Wii Balance Board, such as Yoga or Aer-
obics. The game provides visual feedback as well as
track the user’s performance over time.
Figure 1: Illustration of the Wii Balance board.
The board is shaped like a regular household body
scale. It contains four pressure sensors, one in each
corner as illustrated by figure 1, to measure the forces
exited by the user on the board. With these 4 forces,
the CoP can be calculated using the momentum bal-
ance equations of the board. Communication is han-
HEALTHINF2015-InternationalConferenceonHealthInformatics
76

dled by a wireless Bluetooth link. In order to capture
the raw sensor data with MATLAB, we used the open-
source WiiLab library developed by (Brindza et al.,
2009).
2.1.2 Participants
The dataset used for training purposes consists of
recordings from 39 people. Participants were sorted
in three groups: students, elderly without fall history
and elderly with fall history. Participant characteris-
tics are shown in table 1.
Sixteen students aged 18 to 22 were recruited on
campus to act as control group. They declared not
to have any postural balance issues nor experienced a
fall due to balance issues.
The group elderly without fall risk consists of 15
living at home elderly aged 59 to 79 who declared not
to have fallen in the past 12 months. They were re-
cruited by the researchers among family and friends.
Data from eight elderly people was recorded at a
nursing home. These people declared to have fallen
at least once in the past 12 months, 6 of which fell at
least twice during this time period.
Furthermore, data from an additional 12 elderly,
11 females and 1 male, was recorded at a second
nursing home. Three persons, with an average age
of 84.89 ± 6.88, declared to have fallen at least once
in the past 12 months. The remaining eight elderly,
with an average age of 83.67 ± 4.93, had no history
of falls. This additional dataset is used to validate the
trained classifiers.
The medical ethical commission of the KU Leu-
ven university hospital approved this study and all
participants gave their written informed consent.
2.1.3 Procedure
Participants were asked to stand on the balance board
and perform standardised exercises. The exercises re-
quired the participant to stay as rigid as possible with
their arms positioned next to their body and looking
straight ahead.
In the first exercise the participant places the feet
on predefined outlines located on the balance board,
as shown in figure 1. This stance is hereby referred to
as the rigid stance. In the second exercise the partic-
ipant was asked to stand in the center of the balance
board with feet and knees pressed together, referred
to as the narrow stance.
According to (Melzer et al., 2010), visual feed-
back influences postural sway. Participants were
therefore asked to perform the exercises with both
eyes open and eyes closed. The narrow stance exer-
cise with closed eyes proved to be impossible to main-
tain for the duration of the measurement for all 8 of
the elderly people who had previously fallen and was
therefore dropped from the study.
Each participant thus performed three different
exercises where each exercise was performed three
times, resulting in nine measurements per participant.
Each measurement lasted 40 seconds, during which
the data from the 4 pressure sensors was sampled at a
frequency of 64 Hz.
In the remainder of this paper, each exercise is
addressed using the name of the stance and whether
the eyes were open or closed, i.e.: Rigid Open (RO),
Rigid Closed (RC) and Narrow Open (NO).
2.2 Pre-processing
Before extracting the CoP trajectory, the raw data is
pre-processed. The first and last 5 seconds of each
measurement are trimmed in order to discard any tran-
sient effects, resulting in measurements of 30 sec-
onds. The trimmed data is then filtered using an 8th
order Butterworth filter with a cut-off frequency of
10 Hz to remove any high frequency noise, which
(Salavati et al., 2009) identified as the optimal cut-off
frequency for CoP measurements.
The CoP trajectory in the ML and anterior-
posterior (AP) directions is then calculated using for-
mulas 1 and 2, derived from the momentum balance
equations of the board. These formulas contain the
forces in each corner of the balance board and its
width and length (see figure 1).
COP
ML
=
F
T R
+ F
BR
− F
T L
− F
BL
F
T R
+ F
BR
+ F
T L
+ F
BL
L
2
(1)
COP
AP
=
F
T L
+ F
T R
− F
BL
− F
BR
F
T R
+ F
BR
+ F
T L
+ F
BL
W
2
(2)
2.3 Feature Extraction
From the CoP trajectories, we extract the mean ve-
locity, standard deviation of the velocity and the stan-
dard deviation of the amplitude in both the ML and
AP directions. Our choice of features is based on
the findings of (Piirtola and Era, 2006) and (Melzer
et al., 2004) which show that both velocity and am-
plitude can be used as an indicator of falls. While
other features such as the 95% confidence ellipse area
have also proven successful, we hypothesised, based
on the results of the before mentioned studies, that
two-dimensional features of velocity and amplitude
would allow for a classifier with a sufficiently high
accuracy.
AutomaticFallRiskEstimationusingtheNintendoWiiBalanceBoard
77

Table 1: Characteristics of the participants included in the training data. [mean ± std.dev.]
Students (N = 16) Elderly non-fallers (N = 15) Elderly fallers (N = 8)
Age 19.53 ± 1.77 71.87 ± 5.80 85.40 ± 5.83
Gender [f/m] 4/11 12/3 7/1
Height [cm] 175 ± 7 160 ± 8 152 ± 11
Weight [kg] 86.85 ± 12.55 71.87 ± 5.8 64.40 ± 7.98
2.4 Classification
For each measurement per exercise and type of fea-
ture, a SVM classifier is trained. Two different types
of SVM classifiers are evaluated, one with a linear and
one with a Gaussian radial basis function (rbf) kernel.
KNN classifiers, with k = 3 and k = 4, are also trained
and validated.
Each exercise was performed three times, result-
ing in three sets of classifiers per exercise per feature
(a set being 2 SVM and 2 KNN classifiers).
The data recorded from 39 people containing 16
students, 15 elderly without and 8 elderly with fall
history, as described in section 2.1.2, is used to train
the classifiers. All classifiers are of the binary variant
(i.e.: they can only distinguish between two classes).
Data from students and elderly without fall history
is grouped together and labelled as the ”non-fallers”
class, while the elderly with fall history are labelled
as the ”fallers” class.
2.5 Validation
Initial validation of the classifiers is done using 10-
fold cross validation, resulting in accuracy scores for
each classifier. Classifier and kernel parameters are
then tuned to achieve the highest possible accuracy. It
is worth noticing that the classifiers are trained with
one measurement per exercise per participant. This
prevents multiple measurements of the same person
to be in different folds which would bias the results.
The validation dataset described in 2.1.2 of 12 ad-
ditional elderly persons is used to validate the trained
SVM classifiers. Data from this dataset is automat-
ically labelled by the SVM classifier and confusion
matrices are created from the results. This is done for
each exercise separately. The choice to only validate
the SVM classifier is based on the achieved results
in combination with the advantages of the SVM as
compared to the KNN classifier, which are outlined
in secion 4.
The validation dataset was recorded in a differ-
ent nursing home with no connection between the two
groups of participants.
3 RESULTS
Table 2 shows the average cross-validated accuracy of
the classifiers per exercise together with the standard
deviation. The three measurements per exercise are
averaged to produce this accuracy. The highest accu-
racy of 96.49% ± 4.02 is achieved with the rbf SVM
using the NO exercise and standard deviation of the
velocity as feature. The difference between features,
exercises and classifiers seems to be statistically irrel-
evant, but we can see that the standard deviation of the
amplitude performs the worst of the three features.
Figure 2 illustrates the separability of the training
data. The training data of the first linear SVM RO
classifier (RO1) is shown. Each point represents a
participant’s velocity’s standard deviation for the first
RO exercise. The x and y axis represent the velocity
in the ML and AP directions respectively. The sup-
port vectors are circled and the linear hyperplane is
visualised.
0 0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5
3
3.5
4
ML
AP
No fall history
Fall history
Support Vectors
Figure 2: Plot of the SVM training data with support vectors
and linear hyperplane. Exercise: RO1, feature: std. dev.
velocity.
Figure 3 shows the effect of the length of the mea-
surement on the accuracy of the SVM classifier. Illus-
trated here is the average accuracy of the RO exercise.
Table 4 shows the confusion matrices of the val-
idation experiment with the validation dataset. As
mentioned in section 2.5, only the linear SVM is
HEALTHINF2015-InternationalConferenceonHealthInformatics
78
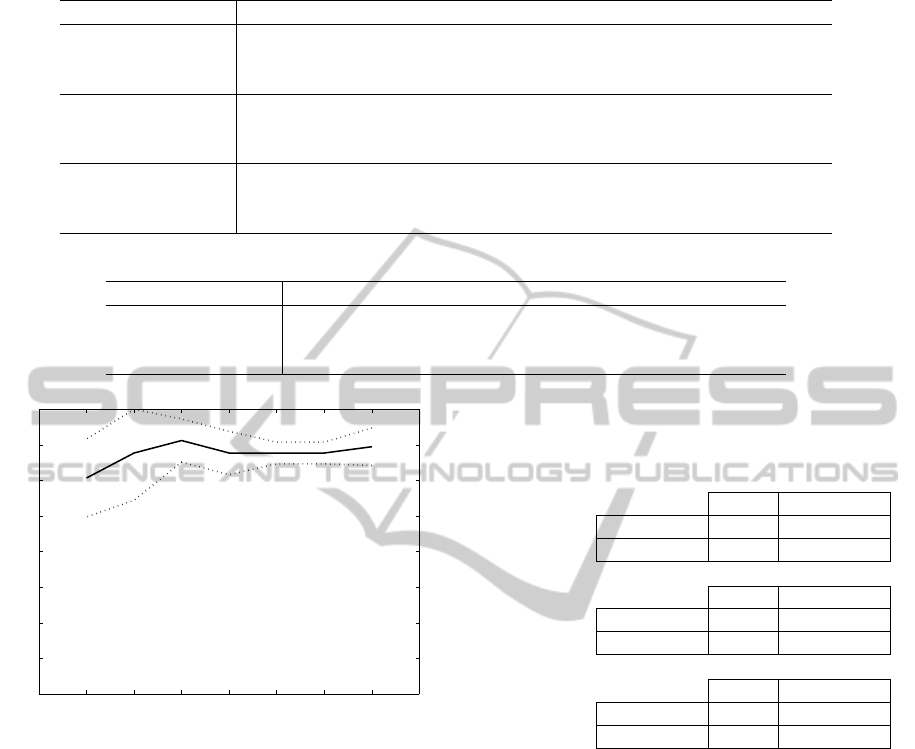
Table 2: Average cross-validated accuracy [%] of the classifiers for each exercise and feature. [mean ± std.dev.]
Feature Exercise SVM (lin) SVM (rbf) KNN (3) KNN (4)
std. dev. velocity RO 94.87 ± 2.57 92.31 ± 2.57 94.01 ± 3.92 95.72 ± 1.48
RC 94.87 ± 2.57 91.45 ± 3.92 91.40 ± 2.88 93.09 ± 1.54
NO 92.10 ± 2.63 96.49 ± 4.02 92.98 ± 1.52 93.85 ± 3.04
mean velocity RO 95.72 ± 3.92 94.87 ± 2.57 94.01 ± 2.96 94.87 ± 4.45
RC 93.11 ± 1.40 93.97 ± 1.45 91.38 ± 1.42 93.97 ± 1.45
NO 92.98 ± 1.52 94.73 ± 2.63 92.10 ± 0.00 93.85 ± 3.04
std. dev. amplitude RO 86.32 ± 2.96 83.75 ± 3.92 82.05 ± 5.13 84.61 ± 6.78
RC 87.04 ± 2.77 86.19 ± 3.08 88.75 ± 4.13 89.60 ± 4.67
NO 84.30 ± 0.15 86.84 ± 2.62 83.42 ± 6.17 83.54 ± 4.11
Table 3: Average cross-validated accuracy [%] of the classifiers per feature, averaged across the exercises. [mean ±std.dev.]
Feature SVM (lin) SVM (rbf) KNN (3) KNN (4)
std. dev. velocity 93.95 ± 1.60 93.41 ± 2.70 92.80 ± 1.31 94.22 ± 1.35
mean velocity 93.94 ± 1.55 94.52 ±0.49 92.50 ± 1.36 94.23 ± 0.56
std. dev. amplitude 85.89 ±1.42 85.59 ±1.63 84.74 ± 3.54 85.92 ± 3.24
5 10 15 20 25 30 35 40 45
60
65
70
75
80
85
90
95
100
Time [s]
Accuracy [%]
Figure 3: Average cross-validated accuracy of the linear
SVM classifier plotted against measurement length. The
dotted lines are the upper and lower limits of the standard
deviation. Exercise: RO, feature: std. dev. velocity.
validated. Each matrix contains the summed results
of the three measurements per exercise, i.e.: the
true and false negatives and positives of the mea-
surements were added together per exercise. To
recap, each person performed three different ex-
ercises, where each exercise was executed three
times. For the RO and RC exercise this results in
3 measurements x 12 persons = 36 results. The NO
confusion matrix contains a total of 31 results. This is
due to the fact that several participants in the valida-
tion dataset failed to execute this exercise.
4 DISCUSSION
The standard deviation of the velocity and the mean
Table 4: Confusion matrices of the validation experiment,
each matrix contains the summed results of an exercise. Top
to bottom: RO (N = 36), RC (N = 36), NO (N = 31).
Prediction
Faller Non-Faller
Actual value
Faller 9 0
Non-Faller 13 14
Faller Non-Faller
Actual value
Faller 7 2
Non-Faller 13 14
Faller Non-Faller
Actual value
Faller 6 0
Non-Faller 17 8
velocity perform almost equally well as features, with
only a marginal difference between the two. Table 3
shows the accuracy of each classifier averaged across
all exercises. The linear SVM performs best with the
standard deviation of the velocity as feature, while the
SVM with rbf kernel performs best using the mean
velocity. The standard deviation of the amplitude
scores the lowest of the three features across all clas-
sifiers and exercises. The KNN classifiers perform
almost equally well for both the standard deviation
of the velocity and the mean velocity. Again, the
standard deviation of the amplitude scores the lowest.
In section 2.3 it was hypothesised that our choice of
features would result in a sufficiently high accuracy,
which is confirmed by the results.
The rbf SVM offers the highest average accuracy
when using the NO exercise and standard deviation
of the velocity, but scores lower than the linear SVM
with the other two exercises. The KNN classifier
scores highest with all exercises and features when
AutomaticFallRiskEstimationusingtheNintendoWiiBalanceBoard
79

k = 4. While the KNN classifiers score almost equally
high as compared to the SVM classifiers, the former
is prone to be the slowest of the two and require more
memory when a lot of data points are present since it
is a form of lazy learning (Atkeson et al., 1997).
While previous studies such as (Melzer et al.,
2010) suggest that the rigid stance is not suited for
measurements regarding fall related indicators, our
results show otherwise. As seen in table 2, all three of
the exercises result in roughly the same accuracy for
each classifier and feature. While the highest aver-
age accuracy was achieved with the rbf SVM and NO
exercise, this exercise was also the most difficult to
carry out by the elderly participants. The RO exercise
is more suited to be carried out while no specialised
personnel is nearby without a significant loss in accu-
racy.
In figure 2 we can see that the training data is com-
pletely separable by the hyperplane. A cluster of non-
fallers can easily be distinguished in the lower left
corner, which is an area of low postural sway. This
group contains all 16 student participants. Fallers are
less grouped together and located more towards the
top right corner.
As seen in figure 3, the length of the measurement
has little effect on the cross-validated accuracy of the
SVM classifier. It is only below 20 seconds that a
decline in accuracy is observed. This loss of accu-
racy can be explained due to the fact that in a lim-
ited time frame the CoP trajectory might not change
enough in order to extract meaningful features. Fur-
thermore, trimming the measurement length was done
by removing an equal amount of data points at the
start and end of the measurement. This might explain
the increase in accuracy at the 20 second mark. We
found that at the start of the measurements, several
participants exhibited anticipation effects such as in-
creased stiffening of the muscles. In the same manner,
participants became tired or anxious towards the end.
Trimming these effects can have a positive influence
on the accuracy, as long as a minimum measurement
time of 20 seconds is kept. The ideal measurement
time is thus located between 20 and 40 seconds.
The confusion matrices in table 4 show that the
SVM model is capable of classifying all fallers with
the RO exercise. While the RO and RC exercise offer
the same amount of false positives and true negatives,
the RC exercise has two false negatives as compared
to zero for the RO exercise. A false negative in this
context weighs more than the false positive. When a
person without fall risk is classified incorrectly (false
positive), a follow up by a doctor or care giver will
give exclusion, whereas an incorrect classification for
a person with actual fall risk (false negative) might
give that person a false sense of security. The NO
exercise performs the lesser of the three. Note that
N = 31 because several participants failed to execute
this exercise. This is because the narrow stance is dif-
ficult to maintain for elderly adults. The NO exer-
cise was also recorded as the last of the three. While
participants were able to take a short break between
exercises, this still introduced a bias in the results.
The high amount of false positives for all three
exercises is due to the fact that several non-fallers in
the validation dataset had underlying conditions that
influence postural balance. Two non-fallers are sys-
tematically classified as fallers and account for six of
the total amount of false positives per exercise. While
these people did not fall in the last year, this wrongful
classification can be attributed to the fact that they had
hip-prostheses. Excluding these elderly would bring
the number of false positives down to seven for the
RO and RC exercise. After exclusion, the RO exer-
cise offers the highest accuracy of 76.6%. False posi-
tives may also be attributed to the fact that the average
age of non-fallers in the validation dataset is higher as
compared to the training dataset.
5 CONCLUSION AND FUTURE
WORK
It is possible to accurately distinguish between el-
derly who have recently experienced falls and non-
falling elderly persons using the Nintendo Wii Bal-
ance board in conjunction with machine learning al-
gorithms. Both the SVM and KNN classifier offer
good performance with our current dataset.
A few points of improvement, however, remain.
Firstly, the recorded dataset is relatively small and
contains data from a very specific group of people.
With more data, it may be possible to further increase
the accuracy of the classifiers and reduce the amount
of false positives. Secondly, the algorithm may be ex-
tended to detect different pathologies such as Parkin-
son’s disease. This would also require more data.
While a medical diagnosis would still be required, the
tool could be used as a preliminary indicator. Lastly,
it would be interesting to see if the algorithm can give
an indication of the severity of the fall risk instead of
a binary classification.
Nevertheless, our results indicate that the Nin-
tendo Wii Balance board can be a viable and cheap
alternative to pressure plates for the detection of fall
risk in elderly persons.
HEALTHINF2015-InternationalConferenceonHealthInformatics
80

ACKNOWLEDGEMENTS
This work is funded by the iMinds FallRisk project.
The iMinds FallRisk project is co-funded by iMinds
(Interdisciplinary Institute for Technology), a re-
search institute founded by the Flemish Government.
Companies and organisations involved in the project
are COMmeto, Televic Healthcare, TP Vision, Ver-
haert and Wit-Gele Kruis Limburg, with project sup-
port of IWT.
The authors would furthermore like to thank the
nursing homes, students and elderly who participated
in this study.
REFERENCES
Atkeson, C., Moore, A., and Schaal, S. (1997). Lo-
cally weighted learning. Artificial Intelligence Re-
view, 11:11–73.
Berg, K., Wood-Dauphin
´
ee, S., Williams, J., and Gayton,
D. (1989). Measuring balance in the elderly: prelim-
inary development of an instrument. Physiotherapy
Canada, 41(6):304–311.
Brindza, J., Szweda, J., Liao, Q., Jiang, Y., and Striegel, A.
(2009). Wiilab: Bringing together the nintendo wi-
imote and matlab. In Frontiers in Education Confer-
ence (FIE). IEEE.
Duncan, P., Studenski, S., Chandler, J., and Prescott, B.
(1992). Functional reach: Predictive validity in a sam-
ple of elderly male veterans. The Journals of Geron-
tology, 47(3):93–98.
Gardner, M., Buchner, D., Robertson, M., and Campbell, A.
(2001). Practical implementation of an exercise-based
falls prevention programme. Age Ageing, 30:77–83.
Guralnik, J., Ferrucci, L., Simonsick, E., Salive, M., and
Wallace, R. (1995). Lower-extremity function in per-
sons over the age of 70 years as a predictor of sub-
sequent disability. The New England Journal Of
Medicine, 332(9):556–562.
Horak, F. B., Wrisley, D. M., and & Frank, J. (2009). The
balance evaluation systems test (bestest) to differen-
tiate balance deficits. Physical Therapy, 89(5):484–
498.
Large, J., Gan, N., Basic, D., and Jennings, N. (2006). Us-
ing the timed up and go test to stratify elderly inpa-
tients at risk of falls. Clinical Rehabilitation, 20:421–
428.
Martin, F. (2011). Falls risk factors: Assessment and man-
agement to prevent falls and fractures. Canadian Jour-
nal on Aging, 30(1):33–44.
Melzer, I., Benjuya, N., and Kaplanski, J. (2004). Postural
stability in the elderly: a comparison between fallers
and non-fallers. British Geriatrics Society, 33(6):602–
607.
Melzer, I., Kurz, I., and Oddsson, L. I. (2010). A retro-
spective analysis of balance control parameters in el-
derly fallers and non-fallers. Clinical Biomechanics,
25(10):984–988.
Milisen, K., Detroch, E., Bellens, K., Braes, T., Dier-
ickx, K., Smeulders, W., Teughels, S., Dejaeger, E.,
Boonen, S., and Pelemans, W. (2004). Falls among
community-dwelling elderly: a pilot study of preva-
lence, circumstances and consequences in flanders.
Gerontol Geriatr., 35:15–20.
Noury, N., Rumeau, P., Bourke, A.,
´
OLaighin, and Lundy,
J. (2008). A proposal for the classification and evalu-
ation of fall detectors. Elsevier Masson, 29:340–349.
Piirtola, M. and Era, P. (2006). Force platform measure-
ments as predictors of falls among older people a re-
view. Gerontology, 52:1–16.
Podsiadlo, D. and Richardson, S. (1991). The timed ”up &
go”: a test of basic functional mobility for frail elderly
persons. Journal of the American Geriatrics Society,
39(2):142–148.
Robertson, M. and Gillespie, L. (2013). Fall prevention
in community-dwelling older adults. Journal of the
American Medical Association, 309(13):1406–1407.
Salavati, M., Hadian, M., Mazaheri, M., Negahban, H.,
Ebrahimi, I., Talebian, S., Jafari, A., Sanjari, M., So-
hani, S., and Parnianpour, M. (2009). Testretest re-
liabty of center of pressure measures of postural sta-
bility during quiet standing in a group with muscu-
loskeletal disorders consisting of low back pain, ante-
rior cruciate ligament injury and functional ankle in-
stability. Gait & Posture, 29:460–64.
Tinetti, M. (2003). Preventing falls in elderly persons. The
New England Journal Of Medicine, 348:42–49.
Tinetti, M. and Williams, C. (1998). The effect of
falls and fall injuries on functioning in community-
dwelling older persons. The Journals of Gerontology,
53(2):112–119.
Tinetti, M., Williams, T., and Mayewski, R. (1986). Fall risk
index for elderly patients based on number of chronic
disabilities. The American Journal of Medicine,
80(3):429–434.
AutomaticFallRiskEstimationusingtheNintendoWiiBalanceBoard
81
