
Mixed Integer Programming with Decomposition to Solve a Workforce
Scheduling and Routing Problem
Wasakorn Laesanklang, Dario Landa-Silva and J. Arturo Castillo-Salazar
School of Computer Science, ASAP Research Group, The University of Nottingham, Nottingham, U.K.
Keywords:
Workforce scheduling, Routing problem, Home care scheduling, Mixed integer programming, Problem
decomposition.
Abstract:
We propose an approach based on mixed integer programming (MIP) with decomposition to solve a workforce
scheduling and routing problem, in which a set of workers should be assigned to tasks that are distributed
across different geographical locations. This problem arises from a number of home care planning scenarios
in the UK, faced by our industrial partner. We present a mixed integer programming model that incorporates
important real-world features of the problem such as defined geographical regions and flexibility in the workers’
availability. Given the size of the real-world instances, we propose to decompose the problem based on
geographical areas. We show that the quality of the overall solution is affected by the ordering in which the
sub-problems are tackled. Hence, we investigate different ordering strategies to solve the sub-problems and
show that such decomposition approach is a very promising technique to produce high-quality solutions in
practical computational times using an exact optimization method.
1 INTRODUCTION
The workforce scheduling and routing problem
(WSRP) is a difficult problem that arises in industries
like home care, health care, patrol service, meter read-
ing, etc. (Castillo-Salazar et al., 2014). One specific
example of WSRP is home health care services where
nurses or care workers should deliver care services
at the patient’s home. Solving the problem involves
producing a job schedule and a route for each worker
while satisfying the business requirements and consid-
ering workers qualifications and skills, task require-
ments, travelling distances, etc. It is usually expected
that the solution gives the lowest operational cost.
Developing automated solution methods to solve
WSRP scenarios is a current research challenge as
reflected by recent published research (Mankowska
et al., 2014; Liu et al., 2014; Hart et al., 2014). Solv-
ing an instance of WSRP often requires the expertise
and knowledge of a human planner (Barrera et al.,
2012). In this research, we are working with an in-
dustrial partner who provides scheduling services for
businesses and other organisations facing this type of
problems. The data sets considered here come from
real-world scenarios. A particular feature is that ‘work-
ing areas’ or ‘regions’ are pre-defined and this affects
the difficulty of the problem being tackled.
Tackling WSRP with exact optimization methods
to produce solutions in practice is still a research chal-
lenge. Since obtaining an optimal schedule is the
ultimate goal, exact methods like mathematical pro-
gramming are a suitable approach. However, proven
optimality with exact methods has been shown mainly
on problem instances of limited size (Borsani et al.,
2006; Bredstrom and Ronnqvist, 2007). Problem in-
stances faced in practice are larger and for solving
them, heuristic methods are usually considered more
efficient in terms of computation time (Akjiratikarl
et al., 2007; Pillac et al., 2012). The motivation for our
work is to develop a solution approach based on exact
optimization to tackle real-world WSRP instances.
In this paper, we propose a decomposition ap-
proach that uses mixed integer programming to tackle
WSRP instances of practical size. The proposed
method splits the problem into sub-problems according
to defined geographical areas. Our computational ex-
periments show that the approach allows to explore the
trade-off between computation efficiency and solution
quality. Moreover, the insights from our experiments
suggest that success of decomposition varies accord-
ing to the problem instance, which provides us with
ideas for future research.
The main contribution of this paper is to show
that the ordering in which sub-problems in workforce
283
Laesanklang W., Landa-Silva D. and Arturo Castillo Salazar J..
Mixed Integer Programming with Decomposition to Solve a Workforce Scheduling and Routing Problem.
DOI: 10.5220/0005223602830293
In Proceedings of the International Conference on Operations Research and Enterprise Systems (ICORES-2015), pages 283-293
ISBN: 978-989-758-075-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

scheduling and routing are tackled within a decompo-
sition approach, has an effect on the computational
efficiency and achieved solution quality. Following
this, some ordering strategies are proposed to achieve
solutions of good quality, typically 16.36% of relative
gap on average, in practical computation time.
Section 2 reviews related works in the literature and
establishes the motivation for the research in this paper.
Section 3 gives the problem definition and formulation
for the WSRP considered here. Section 4 describes
the proposed MIP with decomposition approach and
the experimental study, including description of test
data instances. The final section summarises the paper
and outlines some of the proposed future work.
2 LITERATURE REVIEW
Solving integer programming formulations for larger
problem instances still has its limitations in terms of
computation time. Mathematical programming has
been used in the literature to tackle some WSRP. Exam-
ples include linear programming (Angelis, 1998), inte-
ger programming (Kergosien et al., 2009) and mixed
integer programming (Bredstrom and Ronnqvist, 2007;
Dohn et al., 2009; Borsani et al., 2006; Rasmussen
et al., 2012). Solving real-world size problems often
resources to heuristic or hybrid algorithms (Bertels
and Torsten, 2006; Akjiratikarl et al., 2007; Eveborn
et al., 2009). There are some improved exact meth-
ods, like branch and price (Bredstrom and Ronnqvist,
2007; Dohn et al., 2009; Rasmussen et al., 2012), that
can deal with large instances. Branch and price re-
quires problem reformulation which usually involves
Dantzig-Wolfe decomposition to compute a tighter re-
laxation bound (Vanderbeck, 2000; Feillet, 2010). The
algorithm also requires two steps to repeatedly solve
the problem in order to improve the solution.
Decomposition techniques are another good alter-
native to apply exact optimization methods to large in-
teger programming formulations. The basic idea here
is to transform or split the problem into smaller sub-
problems. This technique has been applied in various
problem domains. For example, Benders’ decomposi-
tion was used to produce solutions for large instances
of the aircraft routing and crew scheduling problem
(Cordeau et al., 2001; Mercier et al., 2005). Benders’
decomposition is suitable for problems with exclu-
sive sub-problem sets or problems that shows some
block structures linked by constraints (Benders, 1962).
In another example (Perl and Daskin, 1985) split the
warehouse location-routing problem into three smaller
problems: the complete multi-depot vehicle-dispatch
problem, the warehouse location-allocation problem
and the multi-depot routing-allocation problem. These
three smaller problems were solved in phases and each
of them was formulated with mathematical program-
ming and solved by an exact solver. For detailed re-
views of decomposition approaches see (Ralphs and
Galati, 2010; Vanderbeck and Wolsey, 2010).
Decomposition techniques have also been applied
within heuristic approaches using some form of clus-
tering. For example, (Reimann et al., 2004) tackled
a large vehicle routing problem by decomposing it
into sub-problems. Each sub-problem was a cluster of
customers assigned to a vehicle which then became a
travelling salesman problem. The sub-problem size is
controlled by splitting a large sub-problem to shrink
the corresponding cluster. Similar ideas were applied
in a hybrid heuristic for generating multi-carrier trans-
portation plans (Landa-Silva et al., 2011).
The purpose of this paper is to propose a decompo-
sition approach that uses mixed integer programming
(MIP) to tackle workforce scheduling and routing prob-
lem instances arising in real-world scenarios. For this,
we also present an MIP formulation that incorporates
features of the WSRP scenarios faced by our indus-
trial partner. The proposed decomposition technique
does not require some formulation structure like in
Benders’ decomposition neither uses a heuristic solver.
Our approach harness the power of exact optimization
solvers while decomposing the problem instances in a
way that is meaningful to practice.
3 PROBLEM DESCRIPTION AND
FORMULATION
The goal in WSRP is to assign each worker to under-
take a set of tasks across a set of geographical loca-
tions. A path is the series of tasks to be performed by
a worker within the planning period. A good quality
solution consists of a set of shortest paths represent-
ing the task assignments for each worker at the lowest
cost. The solution should also respect other conditions
such as task pre-requisites, required travelling time be-
tween locations, defined appointment times, workers’
skills, workers availability, restricted working regions,
working time limits, etc.
Consider a graph
G = (V, E)
where
V = T ∪ D ∪
D
0
represents the union of a set of tasks (each task
as a location)
T
, a set of start locations
D
and a set
of end locations
D
0
while
E
represents a set of links
between two locations (e.g. between two task locations
or between the worker’s home and a task location).
The set of workers is denoted by
C
. Binary decision
variable
x
c
i, j
= 1
if worker
c ∈ C
is assigned to a task
j ∈ T
after finishing task
i ∈ T
,
x
c
i, j
= 0
otherwise.
ICORES2015-InternationalConferenceonOperationsResearchandEnterpriseSystems
284

Note that elements of
T
are referred here as tasks but
also each task has an associated location.
In practical scenarios like the ones considered here,
the available workforce and its skills are often not
sufficient to cover all the tasks that need performing.
This can be addressed by introducing a dummy worker
(through a binary decision variable
y
j
) that takes any
excess work that cannot be assigned to the real work-
force (Bredstrom and Ronnqvist, 2008; Rasmussen
et al., 2012). Then, the assignment of tasks is repre-
sented by (1).
∑
c∈C
∑
i∈D∪T
x
c
i, j
+ y
j
= 1 , ∀ j ∈ T (1)
The sequence of tasks that a worker performs is
represented as a path for visiting task locations, hence
the number of workers arriving at one location must be
equal to the number of workers leaving that task loca-
tion so that either workers are assigned to the next task
or go home. Then, the path constraint is represented
by (2).
∑
i∈D∪T
x
c
i, j
=
∑
k∈D
0
∪T
x
c
j,k
, ∀ j ∈ T, ∀c ∈ C (2)
Workers must start and end their paths from their
specific location (e.g. their home or a central office) as
given by (3) and (4). Since
D
and
D
0
are sets of start
and end locations respectively, these two constraints
indicate the start and end locations for each worker.
Also, workers leave their start location and enter their
end location at most once (although the start and end
locations can be different) as expressed by (5) and
(6) respectively. Note that a worker does not leave
his start location if he is not assigned to work. This
is different from the common case in the literature
where all workers leave their start location. In our
problem instances, the specific start and end locations
are provided for every worker.
∑
j∈D
0
∪T
x
c
k, j
≥
∑
j∈D
0
∪T
x
c
i, j
, ∀c ∈ C, ∀i ∈ T, ∃k ∈ D (3)
∑
i∈D∪T
x
c
i,k
≥
∑
i∈D∪T
x
c
i, j
, ∀c ∈ C, ∀ j ∈ T, ∃k ∈ D
0
(4)
∑
j∈D
0
∪T
x
c
i, j
≤ 1 , ∀i ∈ D, ∀c ∈ C (5)
∑
i∈D∪T
x
c
i, j
≤ 1 , ∀ j ∈ D
0
, ∀c ∈ C (6)
Let
S
be the set of skills and
s ∈ S
a particular
skill. For worker
c
the qualification level on skill
s
is
q
c
s
and for task
j
the requirement of skill
s
is
r
s, j
.
Hence, worker
c
can be assigned to task
j
only if the
worker has the required qualifications level for skill
s
, that is,
q
c
s
≥ r
s, j
. Then, in our model the multi-skill
qualification requirements are represented by (7).
x
c
i, j
r
s, j
≤ q
c
s
, ∀c ∈ C, ∀i ∈ D ∪T, ∀ j ∈ T, ∀s ∈ S (7)
Also, travel time between task locations must be
feasible. Decision variable
a
c
i
takes a positive frac-
tional value that gives the worker arrival time to the
location of task
i
. Note that the maximum arrival time
value is 1440 which is equivalent to the 24
th
hour of
the day. Let
a
c
i
,
a
c
j
be the arrival times of worker
c
to
the locations of task
i
and task
j
respectively. Let
t
i, j
be the travelling time between the locations of tasks
i
and
j
. Let
δ
i
be the duration of task
i
. Then, if worker
c
is assigned to perform task
j
after completing task
i
,
inequality (8) (
M
is a large constant number) expresses
the arrival on time requirement.
a
c
j
+ M(1 − x
c
i, j
) ≥ a
c
i
+ x
c
i, j
t
i, j
+ δ
i
, ∀c ∈ C, ∀i ∈ D ∪T, ∀ j ∈ D
0
∪ T (8)
An arrival time window is also defined for task
i
and
the worker should not arrive earlier than
w
L
i
or later
than w
U
i
, as expressed by (9).
w
L
i
≤ a
c
i
≤ w
U
i
, ∀i ∈ T, ∀c ∈ C (9)
An important feature of our WSRP scenarios is
that working regulations and availability can be spe-
cific for each worker. In the problems considered here,
this refers to long breaks between shifts (short breaks
within the working shift are not considered), days-
off, working shift duration, maximum working hours,
and specific worker preferences (e.g. late morning,
afternoon only, whole day, overnight). We adopt a
flexible availability constraint from an optimization of
daily scheduling for home health care services (Traut-
samwieser and Hirsch, 2011). Any task assignment
at time
a
c
j
including the task duration
δ
j
should lie in
between the shift starting time
α
c
L
and the shift end-
ing time
α
c
U
. The availability parameters
α
c
L
and
α
c
U
are real numbers defined for each worker
c
. A task
assigned outside the shift is charged as additional ex-
pense, hence binary decision variable
ω
j
= 1
if this is
the case and
ω
j
= 0
otherwise. Then, individual avail-
ability constraints are denoted by (10) and (11) while
the working hours limit (
h
c
) constraint is denoted by
(12).
α
c
L
− a
c
j
≤ M(1 − x
c
i, j
+ ω
j
)
∀c ∈ C, ∀i ∈ D ∪ T, ∀ j ∈ T (10)
MixedIntegerProgrammingwithDecompositiontoSolveaWorkforceSchedulingandRoutingProblem
285

a
c
j
+ δ
j
− α
c
U
≤ M(1 − x
c
i, j
+ ω
j
)
∀c ∈ C, ∀i ∈ D ∪ T, ∀ j ∈ T (11)
∑
i∈D∪T
∑
j∈T
x
c
i, j
δ
j
≤ h
c
, ∀c ∈ C (12)
Another important feature of our WSRP scenar-
ios is that workers have preferred geographical areas
for working but the decision maker can still request
workers to work outside those preferred regions. We
formulate this in (13) where binary parameter
γ
c
j
= 1
if worker
c
is willing and able to work at the location
of task
j
,
γ
c
j
= 0
otherwise, and binary decision vari-
able
ψ
j
= 1
if worker
c
is forced to work outside their
defined regions.
∑
i∈D∪T
x
c
i, j
− ψ
j
≤ γ
c
j
, ∀c ∈ C, ∀ j ∈ T (13)
Most of the above constraint formulations exist in
literature but not all. Common constraints (see also
(Castillo-Salazar et al., 2014)) such as path constraint
(2), skill and qualification (7) and time windows (9)
form the basic structure of the scheduling and routing
problem (Dantzig and Ramser, 1959; Bredstrom and
Ronnqvist, 2008; Dohn et al., 2009; Castro-Gutierrez
et al., 2011; Rasmussen et al., 2012). Tailor cut con-
straints adopted from literature are the availability con-
straints (10,11) while the constraints that required fur-
ther adaptation to our problem features are the working
region (13) (implemented as soft constraint) and start-
end paths (3-6).
Table 1 summarises the constraints in our MIP
model. Given our real-world data sets, some are im-
plemented as soft constraints. For example, workers
can be forced to work outside their predefined regions
and availability. Also, tasks can be left unassigned
(assigned to the dummy worker). These features are
quite important to maintain the practical applicability
of our model and solution approach.
The objective function (14) involves three costs:
monetary cost, preferences penalty cost and soft con-
straints penalty cost.
Min
∑
c∈C
∑
i∈D∪T
∑
j∈D
0
∪T
d
i, j
+ p
c
j
x
c
i, j
+
∑
c∈C
∑
i∈D∪T
∑
j∈D
0
∪T
ρ
c
j
x
c
i, j
+
∑
j∈T
M
1
y
j
+ M
2
(ω
j
+ ψ
j
) (14)
The first term in (14) is the monetary cost and in-
cludes the travelling cost
d
i, j
of going from location of
task
i
to the location of task
j
, and the payment
p
c
j
for
Table 1: Summary of problem requirements and type of
constraints.
Hard Soft
Job assignment (Cons. (1)) *
Path constraint (Cons. (2)) *
Start-end paths (Cons. (3) - (6)) *
Skill and qualification (Cons. (7)) *
Travel time feasibility (Cons. (8)) *
Time windows (Cons. (9)) *
Worker availability (Cons. (10),(11)) † *
Working hours limit (Cons. (12)) *
Working regions (Cons. (13)) *
†
Hard constraints (15) and (16) are described in Sec-
tion 4.2 and only apply to the decomposition model.
worker
c
to perform task
j
. The second term in (14) is
the preference penalty cost denoted by
ρ
c
j
≥ 0
and is a
summation of penalties for not meeting worker-client
preferences, required skill preferences and working
region preferences. This penalty value can go from 0
to 75 and
ρ
c
j
= 0
when all preferences are met, while
this penalty value grows higher as the preference level
of assigning worker
c
to task
j
decreases. The third
term in (14) is the soft constraints penalty cost due
to the violation of the three soft constraints in the
model. The job assignment constraint has the highest
priority (
M
1
= 2000
), so a violation of this constraint
type costs more than a violation of the the other two
constraints. The worker availability and working re-
gions constraints have the same priority (
M
2
= 500
).
Note that the working regions constraint is involved
in two costs. If the worker is assigned a task in a
non-preferred region then this is a constraint penalty
cost. If the worker is assigned to one of the preferred
regions this is quantified as a preference penalty cost
according to the degree in which the region is preferred
by the worker (several working regions with different
preference levels).
The above MIP model corresponds to the inte-
grated scheduling and routing problem. Solving this
model with an exact optimization method is not prac-
tical considering our real-world problem instances.
Hence, we apply a decomposition technique.
4 DECOMPOSITION APPROACH
AND STUDY
In order to reduce the overall computational time of
solving real-world instances of the integrated work-
force scheduling and routing problem, we propose a
decomposition method in this section. First, we de-
scribe the features of our problem instances as this will
help to explain the proposed decomposition approach.
ICORES2015-InternationalConferenceonOperationsResearchandEnterpriseSystems
286

Later, the method is described and experimental results
are presented.
4.1 Test Instances
For the present work, we prepared some test instances
using real-world data corresponding to home care sce-
narios in the UK, provided by our industrial partner.
A problem instance
P
has a set of locations
V
. Recall
from Section 3 that
V = D ∪ T ∪ D
0
. Also, some of the
tasks
{ j
1
, j
2
, . . . , j
n
}
in
T
share the same geographi-
cal location
κ ∈ K
, where
K
is a set of geographical
locations. A group of locations are assembled as a
geographical area or working region
a ∈ A
. Note that
a ⊆ K
and
A
is a partition. Also, an individual worker
c
may work on one or several geographical areas. As
noted above, a key aspect of our scenarios is that sev-
eral tasks might be required at one particular location.
Each individual task may have different required skills,
worker preferences and worker cost.
We took four real-world scenarios and prepared
a data set from each. Although the instances in each
data set come from the same scenario, each instance
is formed from a different planning time giving a vari-
ation in the available human resources and task re-
quirements. In our data, the start and end locations
of a worker are the same (
d = d
0
). Table 2 shows the
main features of the test instances: the number of avail-
able workers
|C|
, the number of task locations
|K|
, the
numbers of tasks
|T |
and the number of predefined
geographical areas
|A|
. In terms of size, instances
WSRP-A-(01-07) and WSRP-B-(01-07) are consid-
ered small with around 19-34 workers and 13-69 tasks.
The optimal solution for each of these instances can be
found in less than 5 minutes. Instances WSRP-D-(01-
07) and WSRP-F-(01-07) are considered large with
more than 100 workers and 400 tasks. These large in-
stances cannot yet be solved to optimality in practical
computation time. In our experimental study, we use
the small instances to validate the proposed decom-
position approach as we can compare to the optimal
solutions. Moreover, the experimental results show the
suitability of the decomposition approach in tackling
the large instances using an exact optimization solver.
4.2 Geographical Decomposition with
Conflict Avoidance
In this paper, the workforce scheduling and routing
problem is decomposed into working regions as this is
a key feature of the scenarios provided by our indus-
trial partner. Since we decompose the problem into
sub-problems to deal with the larger size more effi-
ciently, by solving the sub-problems one at a time in
Table 2: The test data sets.
Instance |C| |K| |T | |A|
WSRP-A-01 23 25 31 6
WSRP-A-02 22 24 31 4
WSRP-A-03 22 28 38 5
WSRP-A-04 19 22 28 3
WSRP-A-05 19 9 13 3
WSRP-A-06 21 22 28 7
WSRP-A-07 21 9 13 3
WSRP-B-01 25 27 36 6
WSRP-B-02 25 11 12 4
WSRP-B-03 34 43 69 6
WSRP-B-04 34 14 30 4
WSRP-B-05 32 38 61 8
WSRP-B-06 32 38 57 7
WSRP-B-07 32 38 61 7
WSRP-D-01 164 233 483 13
WSRP-D-02 166 215 454 12
WSRP-D-03 174 279 585 15
WSRP-D-04 174 237 520 15
WSRP-D-05 173 259 538 15
WSRP-D-06 174 291 610 15
WSRP-D-07 173 293 611 15
WSRP-F-01 805 477 1211 45
WSRP-F-02 769 496 1243 46
WSRP-F-03 898 582 1479 54
WSRP-F-04 789 513 1448 47
WSRP-F-05 883 626 1599 59
WSRP-F-06 783 565 1582 44
WSRP-F-07 1011 711 1726 64
|C| = number of workers.
|K| = number of task locations.
|T | = number of required tasks.
|A| = number of working regions.
a given sequence, we can no longer guarantee overall
optimality.
Basically, the decomposition method generates a
sub-problem for each working region and solves each
sub-problem in sequence. Worker assignment con-
flicts (i.e. a worker being assigned to different task
locations at the same time) are avoided because each
sub-problem is solved using only the reduced available
workforce after solving the previous sub-problem.
Algorithm 1 presents the proposed geographi-
cal decomposition with conflict avoidance approach
(GDCA). A problem instance
P
is split into several sub-
problems
P
i
(step 2). A sub-problem
P
i
corresponds to
a geographical area or working region
a ∈ A
. Then, the
sub-problems are solved in a given sequence (steps 3-
6) and different solving sequences can lead to different
solution quality. This is because the first sub-problem
has access to the most workforce resources but subse-
quent sub-problems will have access to limited avail-
able workforce. Since worker assignment conflicts
are avoided, this means that the hard constraints ex-
MixedIntegerProgrammingwithDecompositiontoSolveaWorkforceSchedulingandRoutingProblem
287

pressed by equations (15) and (16) are enforced in this
algorithm.
a
c
j
+ δ
j
− β
c
L
≤ M(2 − x
c
i, j
− ζ
c
)
∀c ∈ C, ∀i ∈ D ∪ T, ∀ j ∈ T ∪ D
0
(15)
β
c
U
− a
c
j
≤ M(1 − x
c
i, j
+ ζ
c
)
∀c ∈ C, ∀i ∈ D ∪ T, ∀ j ∈ T ∪ D
0
(16)
Here,
β
c
L
denotes the start of unavailable time and
β
c
U
denotes the end of unavailable time for worker
c
.
Since the original model generates a continuous path
for a worker, a path created under hard availability
conditions is allocated either before or after the un-
availability period. That is, a path which overlaps with
the unavailability period defined by
β
c
L
and
β
c
U
is not al-
lowed. The control variable
ζ
c
is applied for selecting
only one side of the availability period. When
ζ
c
= 1
the time interval before
β
c
L
is selected and if the
ζ
c
= 0
the time interval after β
c
U
is selected.
In our data, we know that the start location
d
and
end location
d
0
for a worker are the same. Therefore,
we designed a sub-problem solutions combination pro-
cess based on this assumption. During the
Combine
sub-problem solutions
process (step 7), sub-problem
solutions are combined together by connecting the
worker’s paths from each sub-problem to get a long
single path. After this process, a worker leaves his
start location and arrives to his end location only
once. Suppose that
Φ
1
= {(x
c
d,t
1
, a
c
1
), (x
c
t
1
,d
0
, a
c
d
1
)}
is
a solution to sub-problem
P
1
representing the assign-
ment of worker
c
from start location
d
to work on
task
t
1
and returning to end location
d
0
and
Φ
2
=
{(x
c
d,t
2
, a
c
2
), (x
c
t
2
,d
0
, a
c
d
2
)}
is a solution to sub-problem
P
2
representing the assignment of the same worker
c
from starting location
d
to work on task
t
2
and re-
turning to ending location
d
0
. Assume without loss
Algorithm 1:
Geographical decomposition with
conflict avoidance (GDCA).
Data: Problem instance P = {C, A}
1 initialization: For worker c ∈ C, define earliest
availability vector β
L
= (β
c
L
) and latest availability
vector β
U
= (β
c
U
) ;
2 Split problem P by areas denoted as
P
i
= {C, a}, a ∈ A, i = 1...|A|;
3 forall the P
i
∈ P do
4 Solve P
i
with availability α
L
and α
U
by CPLEX
solver→ Φ
i
;
5 Update availability vector β
L
and β
U
;
6 end
7 Combine sub-problem solutions;
of generality that
a
c
1
< a
c
d
1
< a
c
2
< a
c
d
2
. The combin-
ing process redirects the arriving assignment to end
location
d
0
to task
t
2
which gives a global solution as
Φ = {(x
c
d,t
1
, a
c
1
), (x
c
t
1
,t
2
, a
c
2
), (x
c
t
2
,d
0
, a
c
d
2
)}
. It is possible
than in other scenarios of the WSRP, the start loca-
tion and end location for a worker are different, we
leave this for future work as it is not a feature of the
scenarios tackled at present.
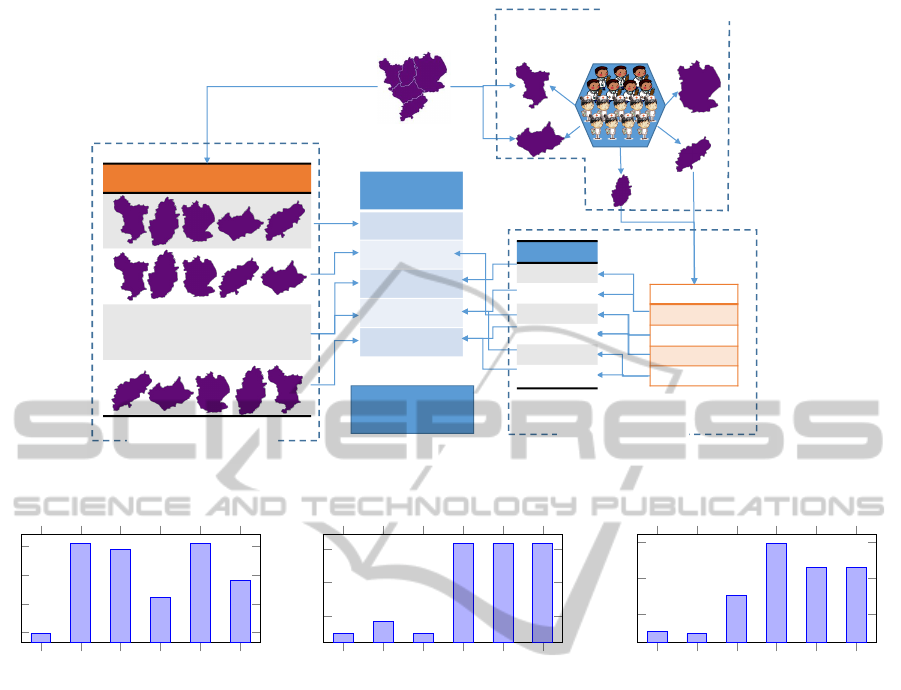
4.3 Experiments and Results
The flow of our experimental study is depicted in Fig-
ure 1. The figure outlines the three parts of the ex-
perimental design. First, on the left-hand side of the
figure, the
permutation study
refers to solving the
sub-problems in different order given by all the differ-
ent permutations of the geographical areas. However,
trying all permutations is practical only in small prob-
lems. Therefore, finding an effective ordering pattern
is the second part of experiment,
observation step
in
the figure. This second part solved each sub-problem
using all available workforce, i.e. ignoring if some
workers were assigned in previous sub-problems. The
third part analysed the results from the observation
step in order to define some strategies to tackle the
sub-problems. Based on this
strategies study
, some
solving strategies were envisaged. Listed in the figure
are these ordering strategies: Asc-task, Desc-task, Asc-
w&u, etc. More details about these ordering strategies
are provided when decribing the
Observation step
below. Finally, the solutions produced with the differ-
ent ordering strategies are compared to the solutions
produced by the permutation study to evaluate the per-
formance of these ordering strategies.
Permutation Study.
Since the number of permu-
tations grows exponentially with the number of geo-
graphical areas, we performed the permutation study
using only the instances with
|A| = 3
and
|A| = 4
ge-
ographical areas. Figure 2 shows the relative gap ob-
tained for the small instances that have 3 regions. Each
sub-figure shows the results for one instance when
solved using the different permutation orders of the 3
regions. Each bar shows the relative gap between the
solution by the decomposition method and the overall
optimal solution. The figure shows that the quality
of the obtained solutions for the different permuta-
tions fluctuates considerably. Closer inspection reveals
that in these instances the geographical areas are very
close to each other and sometimes there is an over-
lap between them. The result also reveals that some
permutations clearly give better results. For example,
permutation “1-2-3” for instance WSRP-A-04, permu-
tations “1-2-3” and “2-1-3” for instance WSRP-A-05
and permutations “1-2-3” and “1-3-2” for instance
ICORES2015-InternationalConferenceonOperationsResearchandEnterpriseSystems
288
PERMUTATION ORDER
…
4
1
1
2
3
5
2
3
4
5
5
4
3
2
1
INFORMATION
# task
# worker
# un-assignment
Task : worker
Objective
value
𝒇(𝒙)
𝑓(𝑃𝐸𝑅𝑀1)
𝑓(𝑃𝐸𝑅𝑀2)
𝑓(𝑃𝐸𝑅𝑀3)
…
𝑓(𝑃𝐸𝑅𝑀𝑛)
Split by area
Solve individual sub-problem
using all workers
Get information
Define strategies
Solve in sequence
defined by strategy
Solve sequence
Generate all possible solving orders
Locate strategies
solution on
permutation study
Observation step
Strategies study
Permutation study
STRATEGIES
Asc-task
Desc-task
Asc-w&u
Desc-w&u
Asc-ratio
Desc-ratio
Figure 1: Outline of the experimental study in three parts: permutation study, observation step and strategies study.
1-2-3
1-3-2
2-1-3
2-3-1
3-1-2
3-2-1
4
6
8
10
Relative gap (%)
WSRP-A-04
1-2-3
1-3-2
2-1-3
2-3-1
3-1-2
3-2-1
30
40
50
WSRP-A-05
1-2-3
1-3-2
2-1-3
2-3-1
3-1-2
3-2-1
20
30
40
WSRP-A-07
Figure 2: Relative gap obtained from solving the 3 instances (WSRP-A-04, WSRP-A-05 and WSRP-A-07) with
|A| = 3
using
the different permutation orders. Each graph shows results for one instance. The bars represent the relative gap between the
solution obtained with the decomposition method and the overall optimal solution.
WSRP-A-07.
Figure 3 shows the relative gap obtained for the
small instances that have 4 regions. Each sub-figure
shows the result for one instance when solved using
the permutation orders of the 4 regions. Each bar
shows the relative gap between the solution by the de-
composition method and the overall optimal solution.
The figure reveals an interesting result from instance
WSRP-B-02. The optimal solution value is obtained
for every permutation. Closer inspection reveals that
the decomposition method works very well on this
instance because its geographical areas are well sep-
arated from each other. Therefore, the sub-problem
solutions are part of the complete overall solution and
not many worker assignment conflicts arise when solv-
ing the sub-problems. For the other instances, WSRP-
A-02 and WSRP-B-04, the quality of the obtained
solutions fluctuates in the same way as in Figure 2. Re-
sults in Figure 3 indicate that some solutions obtained
with the decomposition approach using some permu-
tations have a considerable gap in quality compared
to the overall optimal solution. The figure also shows
that some permutations clearly give better results than
others. For example, permutation “1-2-3-4”, “2-1-3-4”
and “2-3-1-4” for instance WSRP-A-02 and permuta-
tion “4-3-2-1” for instance WSRP-B-04.
The conclusion from this permutation study is that
the order in which the sub-problems are solved matters
differently according to the problem instance. More
importantly, the results confirm our assumption that
some particular permutation could produce a very
good result in the decomposition approach. Hence,
the next part of the study is to find a good solving
order.
Observation Step
. Here we solve each of the sub-
problems using all available workers and collect the
following values from the obtained solutions: number
of tasks in the sub-problem (# task), minimum number
of workers required in the solution (# min worker),
number of unassigned tasks in the solution (# unas-
MixedIntegerProgrammingwithDecompositiontoSolveaWorkforceSchedulingandRoutingProblem
289

0
20
40
Relative gap (%)
WSRP-A-02
−0.5
0
0.5
1
Relative gap (%)
WSRP-B-02
1-2-3-4
1-2-4-3
1-3-2-4
1-3-4-2
1-4-2-3
1-4-3-2
2-1-3-4
2-1-4-3
2-3-1-4
2-3-4-1
2-4-1-3
2-4-3-1
3-1-2-4
3-1-4-2
3-2-1-4
3-2-4-1
3-4-1-2
3-4-2-1
4-1-2-3
4-1-3-2
4-2-1-3
4-2-3-1
4-3-1-2
4-3-2-1
10
15
20
Relative gap (%)
WSRP-B-04
Figure 3: Relative gap obtained from solving the 3 instances (WSRP-A-02, WSRP-B-02 and WSRP-B-04) with
|A| = 4
using
the different permutation orders. Each graph shows results for one instance. The bars represent the relative gap between the
solution obtained with the decomposition method and the overall optimal solution.
signed task) and the ratio of tasks to worker in the solu-
tion (task/worker ratio). Then, we defined six ordering
strategies as follows. Increasing number of tasks in the
sub-problem (Asc-task); decreasing number of tasks
in the sub-problem (Desc-task); increasing sum of
minimum workers required and unassigned tasks (Asc-
w&u); decreasing sum of minimum workers required
and unassigned tasks (Desc-w&u); increasing ratio
of tasks to worker (Asc-ratio) and decreasing ratio of
tasks to worker (Desc-ratio).
Strategies Study
. The GDCA approach is again
executed using the 6 ordering strategies listed above
to tackle the sub-problems in each problem instance.
The results are presented in Figure 4 which shows the
relative gap for the 14 small instances in the WSRP-A
and WSRP-B groups. Note that each bar represents
the relative gap obtained with each strategy.
From Figure 4, the decomposition technique with
ordering strategies gives solutions with relative gaps
below 50%. On average, the decomposition technique
produces relative gap at 16.36%. Moreover, we can
see that some of the ordering strategies are more likely
to produce better solutions than others. The best per-
forming ordering strategy is Asc-w&u that gives 9
best solutions considering all 14 small instances. The
average gap for the ordering strategies Asc-task, Desc-
task, Asc-w&u, Desc-w&u, Asc-ratio and Desc-ratio
are 14.09%, 19.94%, 11.19%, 19.66%, 15.01% and
18.28% respectively. Table 3 shows a comparison of
relative gap between the best permutation order (see
Permutation study
) and the best ordering strategy. It
Table 3: Relative gap (%) of best permutation VS. best
strategy.
Instance Best permutation Best strategy
WSRP-A-04 3.9 6.4
WSRP-A-05 24.67 24.67
WSRP-A-07 14.43 15.03
WSRP-A-02 2.31 2.32
WSRP-B-02 0 0
WSRP-B-04 7.02 8.86
is clearly shown that solutions from the best ordering
strategy are not much different from the best permu-
tation solution (maximum of 2.5% different). In addi-
tion, two out of six solutions (instance WSRP-A-05
and WSRP-B-02) of the best ordering strategy match
the solution from the best permutation. This shows
that the ordering strategies are able to work well in
other problem instances.
The decomposition method is also able to find so-
lutions for the large instances whilst solving those
problems as a whole is not practical in terms of com-
putation time. The results from using the decompo-
sition technique with the 6 ordering strategies on the
large instances are presented in Table 4. The table
shows the objective values of the obtained solutions
as relative gaps cannot be computed because the opti-
mal solutions are not known. The values in
bold
are
the lowest cost (best objective value) obtained among
the six strategies. The table shows that as a whole,
the Desc-ratio and Asc-w&u give four and three best
ICORES2015-InternationalConferenceonOperationsResearchandEnterpriseSystems
290

A-01 A-02 A-03 A-04 A-05 A-06 A-07 B-01 B-02 B-03 B-04 B-05 B-06 B-07
0
20
40
WSRP-
Relative gap (%)
Asc-task Desc-task Asc-w&u Desc-w&u Asc-ratio Desc-ratio
Figure 4: Relative gap obtained from solving the 14 small instances using the 6 ordering strategies. Each bar for an instance
represents the relative gap between a solution by the decomposition method using an ordering strategy and the overall optimal
solution.
32
34
37
47
49
53
54
60
61
64
89
93
93
103
0
100
200
Problem size (items)
Computation time (seconds)
Small instances
620
647
694
711
759
784
784
2012
2016
2237
2365
2377
2482
2737
0.5
1
1.5
·10
4
Problem size (items)
Large instances
Asc-task Desc-task Asc-w&u Desc-w&u Asc-ratio Desc-ratio Optimal
Figure 5: Computation time (seconds) used in solving small and large instances. Each sub-figure corresponds to a problem
size category (small and large). The problem size (items) is the summation of #workers and #tasks. Each graph presents the
computation time used by the decomposition method with the different ordering strategies (line with markers) and the time
used for producing the overall optimal solution (dashed line) when possible.
solutions respectively while the others give two best
solutions. On average, the Desc-task strategy gives the
lowest cost solution, around 5.7% less than the highest
average cost strategy (Asc-ratio).
Figure 5 shows, according to the problem size,
the computation times used by the decomposition ap-
proach using the different ordering strategies and the
time used to find the overall optimal solution. Each
sub-figure presents the problem instances classified
by their size (number of items is
|T | + |C|
). Each
line represents the time used by the ordering strat-
egy in solving the group of 14 problem instances. As
noted before, the time to find the optimal solution
represented by is available only for the small
instances. For the smaller instances with less than 89
items, the computation time used by the decomposi-
tion method is not much different from the time used
to find the optimal solution. The computation time
used to find the optimal solution grows significantly
for instances with 89 items and above. For the large in-
stances, it is shown that the computation time used by
the decomposition method goes above 4 hours (14,895
seconds). Also, for the large instances the computa-
tion time used by the ordering strategies Asc-task and
Desc-task is significantly less than for the other order-
ing strategies. This is because these ordering strategies
do not require an additional process to retrieve infor-
mation about the problem. Hence, considering both
solution quality and computation time, it can be con-
cluded that Asc-task and Desc-task (best known on
average) should be selected for large instances because
they produce solutions which are not much different
from the other strategies but requiring significantly
less computational time (48.3% less on average).
5 CONCLUSION AND FUTURE
WORK
A tailored mixed integer programming model for real-
world instances of a workforce scheduling and routing
MixedIntegerProgrammingwithDecompositiontoSolveaWorkforceSchedulingandRoutingProblem
291

Table 4: Objective value obtained from solving large instances using six ordering strategies.
Instance Asc-task Desc-task Asc-w&u Desc-w&u Asc-ratio Desc-ratio
WSRP-D-01 118,647.95 109,634.79 120,538.27 107,264.93 112,695.33 109,693.81
WSRP-D-02 119,505.44 120,707.43 117,169.05 119,317.34 113,367.92 115,790.07
WSRP-D-03 95,302.20 93,097.74 95,302.20 92,349.70 95,302.20 89,468.63
WSRP-D-04 103,685.14 101,861.74 250,740.31 135,675.84 105,268.17 143,621.85
WSRP-D-05 86,581.13 84,505.24 84,366.48 87,588.51 86,581.13 84,505.24
WSRP-D-06 76,681.66 77,279.43 74,438.87 80,083.86 76,737.43 73,202.04
WSRP-D-07 71,029.11 77,381.16 71,485.90 117,757.75 71,029.11 73,055.89
WSRP-F-01 584,285.07 568,346.64 584,908.75 554,471.47 585,321.17 559,036.26
WSRP-F-02 592,505.48 582,181.95 575,441.87 597,279.38 605,906.81 559,198.12
WSRP-F-03 590,040.74 593,763.31 590,619.01 582,329.81 603,655.07 581,596.60
WSRP-F-04 825,931.68 900,387.30 876,679.55 872,606.58 838,692.36 849,852.84
WSRP-F-05 567,245.71 614,704.32 542,364.31 583,121.68 563,245.40 551,663.99
WSRP-F-06 931,935.20 718,310.26 792,308.91 943,102.96 101,4421.53 777,265.11
WSRP-F-07 696,718.60 777,163.34 684,083.36 777,903.33 874,069.14 875,234.10
Average 390,006.79 387,094.62 390,031.92 403,632.37 410,449.48 388,798.90
Bold text refers to the best solution.
problem is presented. The model is constructed by
incorporating various constraint formulations from the
literature while also adding working region constraints
to the formulation. It is usually the case that models in
the literature for this type of problem are presented but
their solution is approached using alternative methods
such as heuristics because solving the model using
mathematical exact solvers is computationally chal-
lenging. A geographical decomposition with conflict
avoidance approach is proposed here to tackle work-
force scheduling and routing problems while still har-
nessing the power of exact solvers. The proposed
decomposition method allows to tackle real-world size
problems for which finding the overall optimal solu-
tion requires too much computation time. However,
the solution quality fluctuates when changing the order
to tackle the sub-problems defined by the geographi-
cal regions. Exploring all permutation orders to find
the one producing the best results is not practical for
larger problems (e.g. more than 6 geographical ar-
eas). In this work, six ordering strategies are proposed
for obtaining high-quality solutions within acceptable
computation time. Our future research will explore
ways to replace the originally defined geographical
areas with automated clustering to define well sepa-
rated geographical areas even in cases where the areas
defined by the problem data are not well separated.
ACKNOWLEDGEMENTS
Special thanks to the Development and Promotion for
Science and Technology talents project (DPST, Thai-
land) who providing partial financial support. Also, we
are grateful for access to the University of Nottingham
High Performance Computing Facility.
REFERENCES
Akjiratikarl, C., Yenradee, P., and Drake, P. R. (2007). PSO-
based algorithm for home care worker scheduling in the
UK. Computers & Industrial Engineering, 53(4):559–
583, doi:10.1016/j.cie.2007.06.002.
Angelis, V. D. (1998). Planning home assistance for AIDS
patients in the City of Rome , Italy. Interfaces, 28:75–
83.
Barrera, D., Nubia, V., and Ciro-Alberto, A. (2012). A
network-based approach to the multi-activity combined
timetabling and crew scheduling problem: Workforce
scheduling for public health policy implementation.
Computers & Industrial Engineering, 63(4):802–812,
doi:10.1016/j.cie.2012.05.002.
Benders, J. (1962). Partitioning procedures for solving
mixed-variables programming problems. Numerische
Mathematik, 4(1):238–252, doi:10.1007/BF01386316.
Bertels, S. and Torsten, F. (2006). A hybrid setup for a hybrid
scenario: Combining heuristics for the home health
care problem. Computers & Operations Research,
33(10):2866–2890.
Borsani, V., Andrea, M., Giacomo, B., and Francesco, S.
(2006). A home care scheduling model for human re-
sources. 2006 International Conference on Service
Systems and Service Management, pages 449–454,
doi:10.1109/ICSSSM.2006.320504.
Bredstrom, D. and Ronnqvist, M. (2007). A branch and
price algorithm for the combined vehicle routing and
scheduling problem with synchronization constraints.
NHH Dept. of Finance & Management Science Discus-
sion Paper No. 2007/7, (February).
Bredstrom, D. and Ronnqvist, M. (2008). Combined vehi-
cle routing and scheduling with temporal precedence
ICORES2015-InternationalConferenceonOperationsResearchandEnterpriseSystems
292

and synchronization constraints. European Journal of
Operational Research, 191(1):19 – 31.
Castillo-Salazar, J., Landa-Silva, D., and Qu, R. (2014).
Workforce scheduling and routing problems: literature
survey and computational study. Annals of Operations
Research, doi:10.1007/s10479-014-1687-2.
Castro-Gutierrez, J., Landa-Silva, D., and Moreno,
P. J. (2011). Nature of real-world multi-objective
vehicle routing with evolutionary algorithms. Sys-
tems, Man, and Cybernetics (SMC), 2011 IEEE
International Conference on, pages 257–264,
doi:10.1109/ICSMC.2011.6083675.
Cordeau, J.-F., Stojkovic, G., Soumis, F., and Desrosiers,
J. (2001). Benders decomposition for simul-
taneous aircraft routing and crew schedul-
ing. Transportation Science, 35(4):375–388,
doi:10.1287/trsc.35.4.375.10432.
Dantzig, G. B. and Ramser, J. H. (1959). The truck dis-
patching problem. Management Science (pre-1986),
6(1).
Dohn, A., Esben, K., and Jens, C. (2009). The man-
power allocation problem with time windows and job-
teaming constraints: A branch-and-price approach.
Computers & Operations Research, 36(4):1145–1157,
doi:10.1016/j.cor.2007.12.011.
Eveborn, P., Ronnqvist, M., Einarsdottir, H., Eklund, M.,
Liden, K., and Almroth, M. (2009). Operations re-
search improves quality and efficiency in home care.
Interfaces, 39(1):18–34, doi:10.1287/inte.1080.0411.
Feillet, D. (2010). A tutorial on column generation and
branch-and-price for vehicle routing problems. 4OR,
8(4):407–424.
Hart, E., Sim, K., and Urquhart, N. (2014). A real-world em-
ployee scheduling and routing application. In Proceed-
ings of the 2014 Conference Companion on Genetic
and Evolutionary Computation Companion, GECCO
Comp ’14, pages 1239–1242, New York, NY, USA.
ACM.
Kergosien, Y., Lente, C., and Billaut, J.-C. (2009). Home
health care problem, an extended multiple travelling
salesman problem. In Proceedings of the 4th multidis-
ciplinary international scheduling conference: Theory
and applications (MISTA 2009), Dublin, Ireland, pages
85–92.
Landa-Silva, D., Wang, Y., Donovan, P., Kendall, G., and
Way, S. (2011). Hybrid heuristic for multi-carrier trans-
portation plans. In The 9th Metaheuristics Interna-
tional Conference (MIC 2011), pages 221–229.
Liu, R., Xie, X., and Garaix, T. (2014). Hy-
bridization of tabu search with feasible and
infeasible local searches for periodic home
health care logistics. Omega, 47(0):17 – 32,
doi:http://dx.doi.org/10.1016/j.omega.2014.03.003.
Mankowska, D., Meisel, F., and Bierwirth, C. (2014). The
home health care routing and scheduling problem with
interdependent services. Health Care Management
Science, 17(1):15–30, doi:10.1007/s10729-013-9243-
1.
Mercier, A., Cordeau, J.-F., and Soumis, F. (2005). A com-
putational study of Benders decomposition for the in-
tegrated aircraft routing and crew scheduling problem.
Computers & Operations Research, 32(6):1451 – 1476,
doi:http://dx.doi.org/10.1016/j.cor.2003.11.013.
Perl, J. and Daskin, M. S. (1985). A warehouse
location-routing problem. Transportation Re-
search Part B: Methodological, 19(5):381 – 396,
doi:http://dx.doi.org/10.1016/0191-2615(85)90052-9.
Pillac, V., Gueret, C., and Medaglia, A. (2012). On the
dynamic technician routing and scheduling problem.
In Proceedings of the 5th International Workshop
on Freight Transportation and Logistics (ODYSSEUS
2012), page id: 194, Mikonos, Greece.
Ralphs, T. K. and Galati, M. V. (2010). Decomposition
methods for integer programming. Wiley Encyclope-
dia of Operations Research and Management Science,
doi:10.1002/9780470400531.eorms0233.
Rasmussen, M. S., Justesen, T., Dohn, A., and
Larsen, J. (2012). The home care crew schedul-
ing problem: Preference-based visit clustering
and temporal dependencies. European Jour-
nal of Operational Research, 219(3):598–610,
doi:http://dx.doi.org/10.1016/j.ejor.2011.10.048.
Reimann, M., Doerner, K., and Hartl, R. F. (2004). D-Ants:
Savings based ants divide and conquer the vehicle
routing problem. Computers & Operations Research,
31(4):563 – 591, doi:http://dx.doi.org/10.1016/S0305-
0548(03)00014-5.
Trautsamwieser, A. and Hirsch, P. (2011). Optimization of
daily scheduling for home health care services. Journal
of Applied Operational Research, 3:124–136.
Vanderbeck, F. (2000). On Dantzig-Wolfe decomposition in
integer programming and ways to perform branching
in a branch-and-price algorithm. Operations Research,
48(1):111.
Vanderbeck, F. and Wolsey, L. (2010). Reformulation and
decomposition of integer programs. In Junger, M. et al.,
editors, 50 Years of Integer Programming 1958-2008,
pages 431–502. Springer Berlin Heidelberg.
MixedIntegerProgrammingwithDecompositiontoSolveaWorkforceSchedulingandRoutingProblem
293
