
Txupito
An Interactor Component Model for Ambient HCI
Inès de Courchelle, Philippe Roose, Marc Dalmau and Patrick Etcheverry
LIUPPA Laboratory, Anglet, France
Keywords: Interaction, Interactor Model, Ambient, Widget.
Abstract: In this paper, we describe the Txupito interactor model. Nowadays, application contents are accessible on a
wide variety of devices such as laptops, tablets and smartphones but the heterogeneity of such devices does
not help programmers to elaborate ambient interactive applications adapted to each device. Indeed, users do
not interact in the same way on a tablet, a laptop or a smartphone. Furthermore the design of cooperative
HCI (Human Computer Interface) remains a very complex task especially in an ambient and heterogeneous
environment. In this paper, we propose a multimodal mobile interactor model, called Txupito, and a set of
composition operators as a way to achieve interactions with hardware in a distributed and cooperative way.
1 INTRODUCTION
Applications are now present in our everyday life
through smartphones, laptops, and tablets with
which we interact differently. To improve users’
interaction experience, parts of HCI (Human
Computer Interactions) need to be created or deleted
on a device or moved (migrated from one device to
another) at runtime. In this context, designers have
to rethink the way they implement interactions in
their applications because these interactions are now
potentially spread over multiple devices with
different interacting modalities. For example, the
same application can be controlled with a keyboard
and a mouse on a laptop whereas it will be voice
controlled on a smartphone. In this paper, we focus
on pervasive interfaces. How to share widgets in
spite of heterogeneity of devices?
This raises two issues. The first one concerns the
runtime environment because ours applications are
executed in a mobile environment and the presence
of the devices is not guaranteed due to mobile
constraints (mobility, energy, etc.). The second one
concerns the device itself because we cannot predict
its technical specifications (size screen, embedded
sensors, environment, etc.) and the way to adapt
interactions when the application is deployed.
In this paper, we consider an application as
composed of a set of interconnected services each
one made up as a set of software components. We
adapt such an application on runtime with the help
of a software platform called Kalimucho (Da et al.,
2014). This platform manages applications based on
software components linked with first class
connectors. It allows to dynamically [re-]deploy
components at runtime on multiple devices. It
supports live migration of services as well as
addition/suppression of components (ie. services).
In this article we will explain how we use this
pervasive platform to solve the interactions
problems previously described. In that aim we will
define pervasive interactors called Txupito.
Interactors are implemented as software components
and deployed on multiple devices so the HCI can be
adapted at runtime.
This article is organized as follows: in Section 2,
we will present a scenario, which will help us to
introduce and illustrate ours definitions. Section 3
briefly describes the architectural layers of
considered applications. Then, in Section 4, 5 and 6,
we will introduce our Txupito interactor model.
Afterward in Section 7, we will present a prototype
that integrates Txupito interactors. In Section 8, we
will confront our work to related works in
interaction and software components. Finally, we
conclude this paper with suggestions on future work.
2 SCENARIO
The following scenario will be used to illustrate our
approach; it applies in the case of a conference
67
de Courchelle I., Roose P., Dalmau M. and Etcheverry ..
Txupito - An Interactor Component Model for Ambient HCI.
DOI: 10.5220/0005226200670075
In Proceedings of the 5th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2015), pages 67-75
ISBN: 978-989-758-084-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
(Figure 1). A speaker presents a slideshow to an
audience. To facilitate his speech, this slideshow can
be directly sent to the public's smartphones.
Figure 1: Scenario schema.
3 PRINCIPLES: OUR
APPLICATIONS
ARCHITECTURE
Applications are based on a three layers architecture
(Figure 2):
Business Layer: it is the functional core. It is
composed of a set of components linked by
connectors. This component is called a
“Business component” as it encapsulates the
functional part – not the interaction part;
Users Layer: it concerns the users interacting
possibilities with an interface. An interface is
composed of a set of interactors that can be
graphical or not;
Interactor Layer: it represents the bridge
between the business layer and the user. It lets
the user manage the business tasks.
Figure 2: Application Layers.
It is important to note that in Figure 2 the Users
Layer concerns all the users that interact with the
application through a distributed HCI (“Interactor
Layer”) while the Business Components (BC)
ensure processing of information. All these layers
are distributed on all devices involved in the
application.
4 INTERACTOR
Usually programmers use widgets to implement
interactions on applications. We will instead speak
of interactors in order to clearly separate the
interaction from the graphical aspect.
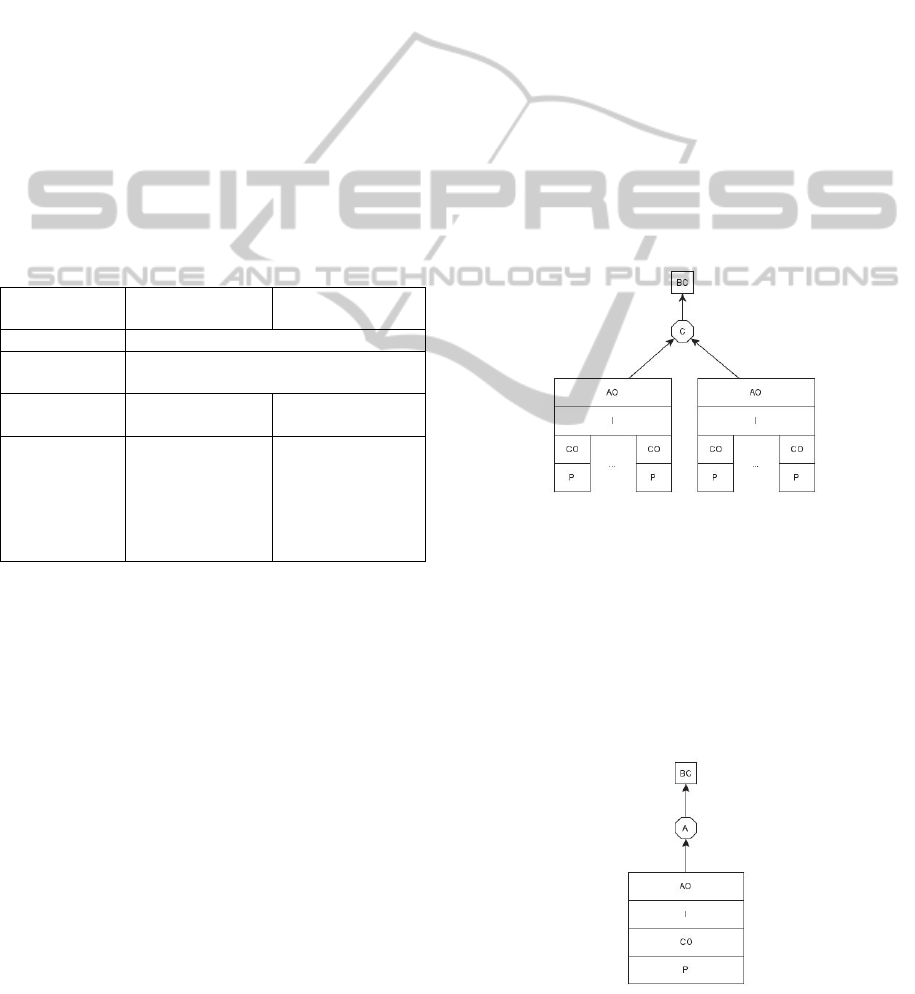
4.1 Description
Interactors allow communication between the users
and the functional core (Business Layer). They are
divided into four parts (Figure 3):
Abstract Object (AO): Contains the type and
the value understood by the Functioning core;
Interpreter (I): Converts physical
information into a language understood by the
system;
Concrete Object (CO): Contains the type and
the value produced by the physical Layer;
Physical (P): Captures the type and the value
produced by a physical device.
An interactor holds one or several Concrete
Objects and one or several Physical parts but only
one Interpreter and one Abstract Object. Interactors
are divided in input and output interactors.
Figure 3: Interactor schema.
For example, the speaker can switch from one slide
to another via a leap motion
(https://www.leapmotion.com/). This is a sensor
(including two infrared cams) that captures hand
movements. A movement from left to right makes
the next slide appears while a movement from right
to left makes the previous slide appears. This
interaction is represented by an input interactor. The
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
68

Physical layer is the leap motion sensor's API. It
captures the movements of the speaker's hand. The
Concrete Object holds the frames captured by this
API. The Interpreter traduces these frames into
"next" or "previous". The Abstract Object represents
the “next” or “previous” data requested by the
business component. In this example, the interactor
has only one Concrete Object and Physical part. An
interactor realized by two buttons will have two
Concrete Object and two Physical parts. The first
one is the “next” button, its Physical part is the Java
API and its Concrete Object is the JButton known by
the java API. The second one is the “previous”
button, it has its own Physical part and Concrete
Object. Then the Interpreter takes these two
Concrete Objects to create an Abstract Object that
represents the “next” or “previous” data.
4.2 Modality
A modality is how a user interacts with the system.
It only concerns the Physical part, the Abstract
Object and the Interpreter of an interactor. In the
leap motion example, the modality is the movement.
The same interactor with a different modality
(mouse left or right click) will have a Physical part
concerning the mouse API, its Concrete Object will
be the number associated to mouse buttons and its
Interpreter will traduce these numbers into "next" or
"previous". The Abstract Object is the same so the
Business Layer can indifferently use the leap motion
or the mouse in order to allow the speaker making
its slideshow (Table 1).
Table 1: Modality example.
Interactor
Changes
slides
With Leap
Motion
With Mouse
Physical Leap Motion
API
Mouse API
Concrete
Object
Frames Button Number
Interpreter Next or Previous
based on frames
Next or Previous
Based on number
Abstract
Object
Next or Previous
4.3 Interaction
We distinguish three types of interaction:
Input interaction (Figure 4) is designed by an
input interactor (II). Data (the Abstract Object) can
be sent to a business component. It corresponds to
the previous example (with the leap motion).
Figure 4: Input Interaction.
Output interaction (Figure 5) is designed by an
output interactor (OI). Data (the Abstract Object)
comes from a business component and is
communicated to the user through the physical layer.
Data can be represented under a graphic form, a
tactile way (vibration), by a speech synthesis system,
etc. For example, the display of a slide is an output
interactor.
Figure 5: Output Interaction.
Input interaction with feedback (Figure 6) is
designed by a combination of an input (II) and an
output interactor (OI). It allows the user to get a
feedback of its input interactions. A user action on
the physical layer of the II produces an Abstract
Object, which is directly sent to the OI that ensures
the feedback. Of course, this AO can also be sent to
a Business Component. For example, when the
speaker wants to go to a specific slide using a voice
modality, he says the number of this slide. The input
interactor uses voice recognition and produces the
number of the slide to show. The output interactor is
a text field automatically filled with this number.
The input interaction carries the voice modality. The
output interaction (feedback) is the slide number
shown in the text field. The Abstract Object is sent
to the business component in order to change the
slide.
Figure 6: Input Interaction with feedback.
5 THE TXUPITO INTERACTOR
MODEL AT RUNTIME
In this part, we will describe the Txupito interactor
model. As Txupito is a Kalimucho component, the
platform can add/remove/migrate interactors at
runtime in order to adapt the HCI to the context and
the wishes/needs of users.
Txupito-AnInteractorComponentModelforAmbientHCI
69
5.1 Changing the Semantic
Obviously the semantic of an interactor is given by
the Abstract Object. Changing the Abstract Object
(AO) and consequently the interpreter means
changing the semantic of the interactor. For example
(Table 2), if we want to use the leap motion to
change the sound level, the Abstract Object (AO)
will concern the sound level. The Interpreter will
now use the speed information of the movement
detector included in the frames information. So it
will extract this information from the frames data of
the API in order to produce an Abstract Object
(AO) of the form "strongly lower", "lower", "little
lower", "little louder", "louder" and "strongly
louder".
This possibility of keeping the same Physical
layer and Concrete Object while changing the
Interpreter and the Abstract Object allows reducing
the work of programming different interactors.
Table 2: Changing the semantic.
Interactor
Volume
Interactor Change
Slides
Physical Leap Motion API
Concrete
Object
Frames
Interpreter Reduce or
increase sound
Next or previous
slide
Abstract
Object
"strongly lower",
"lower", "little
lower", " little
louder", "louder"
or " strongly
louder"
“next" or
"previous"
5.2 Changing the Modality
Sometimes, application context leads us to change
the way we interact with our applications. For
example, during the conference, the speaker is stuck
at his desk because he has to change the slides with
the leap motion. Therefore, if he wants to move, the
modality has to be changed in order to allow him
controlling slide changes with buttons on his
smartphone. For this new interactor, the Abstract
Object will be the same but the Physical part, the
Concrete Object and the Interpreter have to be
changed.
5.3 Assembling Interactors
The synchronization of several input interactors,
with or without feedback, is made possible by the
CARE properties (See section 8.1). These properties
are the following: Complementarity, Assignment,
Redundancy and Equivalence. All this four
properties are operators because we can assemble
several interactors together thanks to them. In this
part we will describe how to combine interactors
with these operators.
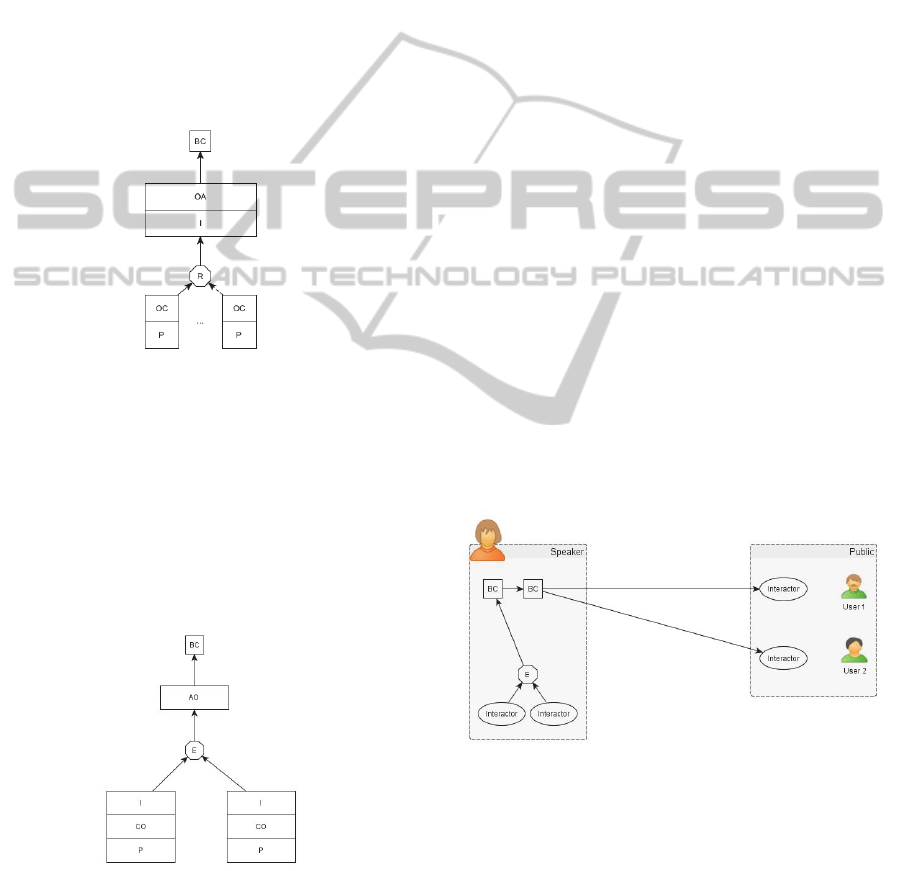
5.3.1 Complementarity
Complementarily (Figure 7) is the use of two or
more interactions to achieve one command. For
example, changing the sound volume can be made
through a hand movement but in order to avoid
errors we can add a confirmation button. Changing
the volume is now carried out by a movement above
the leap and a click on a button to validate. This is
achieved by an input interactor with feedback (leap
motion and text field) and another input interactor
(button). Abstract Objects of both interactors, are
sent to a Complementary Operator that produces the
final Abstract Object to the Business Layer.
Figure 7: Complementarity Operator.
5.3.2 Assignment
Assignment (Figure 8) allows using only one
interactor to achieve an action. The interface or the
business component waits for a particular
interaction. This operator checks if the interactor is
the good one. Otherwise, the interaction is not taken
into account by the system. This operator expresses
Figure 8: Assignment Operator.
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
70
the absence of choice. For example, the only way to
hear the speech of the speaker is to switch on a
button. The business component for sound
restitution allows only one interactor.
5.3.3 Redundancy
Redundancy (Figure 9) is the use of several
interactions to achieve an action. All these
interactions are necessary to validate the action.
They have the same interpretation and concrete
object. For example, at the end of the presentation,
public members can send the slide number on which
they want to ask a question. The speaker has to
select the same slide number to validate the demand.
Figure 9: Redundancy Operator.
5.3.4 Equivalence
Equivalence (Figure 10) allows using several
interactors to achieve the same action. For example,
to change the slide the speaker can use the leap
motion or buttons on his smartphone. Both produce
the same Abstract Object and the operator produces
the same Abstract Object each time it receives one
from one interactor.
Figure 10: Equivalence Operator.
5.4 Migration
Migration is moving an interactor from one device
to another. The Kalimucho platform allows this
migration during execution. For example, in our
scenario if the speaker’s smartphone has a low
battery, the interactor “next/previous” with two
buttons can be moved to his laptop.
Migration is different from removing the old
interactor and creating a new one because the
Interpreter can be an automata and can hold a state.
When a component is migrated its actual state is sent
to the new host so the functioning of the Interpreter
is ensured after the migration.
6 APPLICATION
ORGANIZATION
Ours applications are distributed on many devices,
i.e. several parts of the application run on various
devices. We use a platform called Kalimucho to
build and reconfigure applications made of an
assembly of software components.
For example, during the conference, the platform
deploys the slide show Business Components, the
input interactors to control slides, the operators on
the speaker's devices and the output interactors to
read slides on the publics’ devices. The speaker has
several interactors to change slides and uses more
than one device. According to the Business
Components deployed on each public device, the
user can see slides as normal pictures or as texts
only. The application is organized as follows (Figure
11):
Figure 11: Application Organization.
The platform is able to choose the Business
Component it deploys on each device according to
the available resources on this device (Da et al.,
2014). So, on a Smartphone with a little screen it
will show slide's text only while in a big one it will
show slides as pictures.
Txupito-AnInteractorComponentModelforAmbientHCI
71
7 PROTOTYPE
In order to validate these propositions, we developed
a prototype corresponding to the illustrating example
of this paper. The speaker can change slides with his
keyboard, his smartphone and/or a leap motion
connected to his laptop. The public see the current
slide on their smartphones in two formats: text only
or picture.
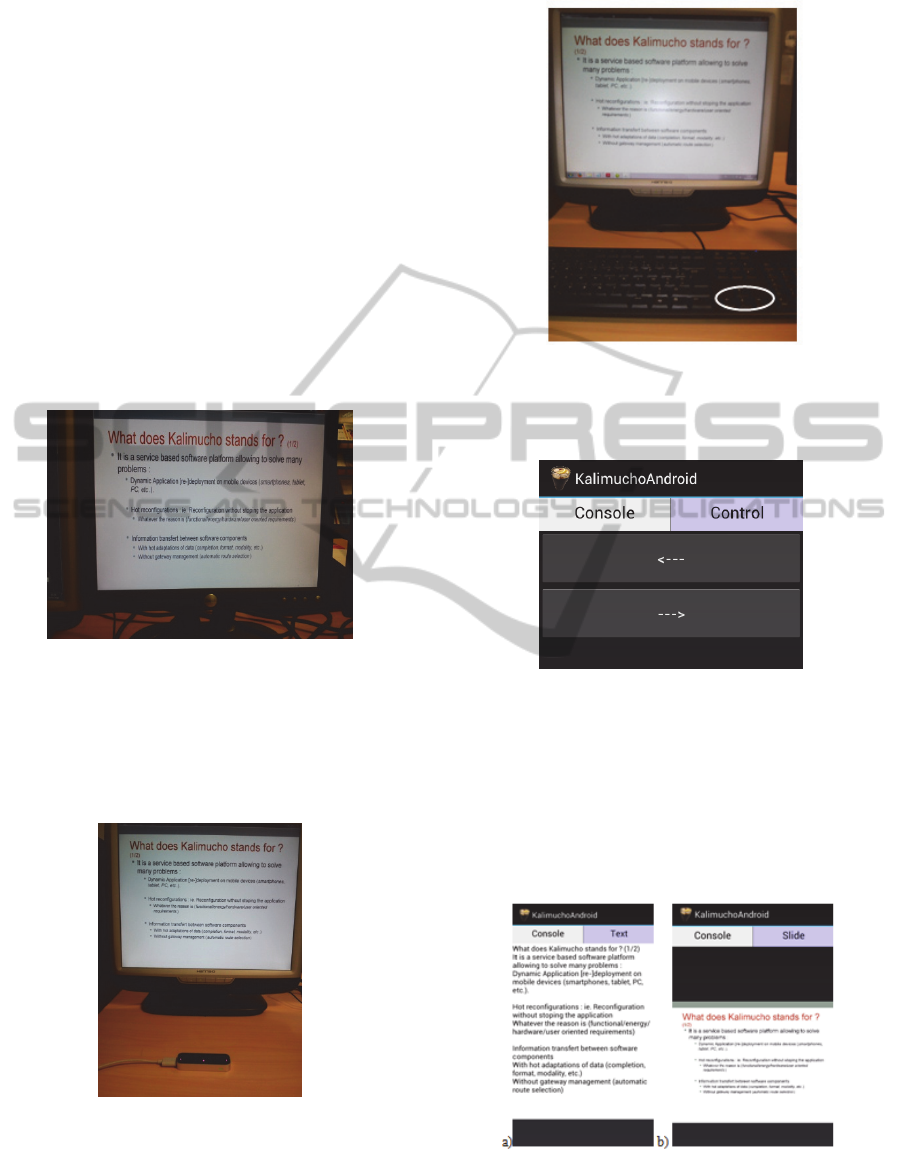
7.1 Snapshots
7.1.1 Speakers’ HCI
Figure 12 shows the presentation displayed on the
speaker's laptop. Slides appear as pictures on the
screen.
Figure 12: Speaker's laptop.
He can change the slides with a leap motion (Figure
13) using a hand movement. A movement from left
to right makes the next slide appears while a
movement from right to left makes the previous
slide appears.
Figure 13: Speaker's Leap Motion.
Moreover, the speaker can also control the slides
with his keyboard left and right arrows keys (Figure
14).
At the end, if he wants to move away from his
Figure 14: Speaker's keyboard.
his desk, a new interactor allows him changing
slides from his smart phone (Figure 15).
Figure 15: Speaker's smartphone.
7.1.2 Public’s HCI
To follow the conference, the current slide is sent to
the smart phones of the public. If the smart phone
has a small screen only the text of the slide is sent
(Figure 16 a). Otherwise, the picture is displayed
(Figure 16 b).
Figure 16: Current slide text on public's smartphone.
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
72
7.2 Prototype Architecture
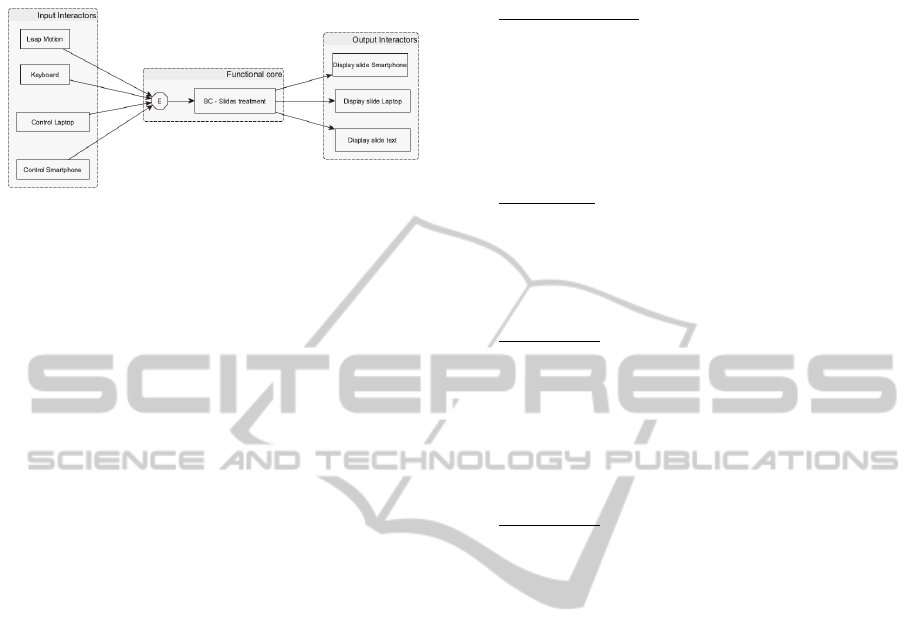
Figure 17: Application Graph.
The application graph is shown in Figure 17. The
left side of the figure holds all the speaker's input
interactors. They collect the Abstract Object “next”
or previous” and are linked by an Equivalence
operator (E). In the functional core (center side of
the figure), the Abstract Object is sent to the
Business component that uses it to change the slides.
When a slide is selected, it is sent to the output
interactors for the public members (right side of the
figure) in different formats (picture for laptop, text,
or picture for smartphones).
8 RELATED WORK
This section presents a state of the art related to
interaction, interactors, and software components.
8.1 Interaction and Multimodality
L.Nigay (Nigay and Coutaz, 1996) describes the
modality of interaction as a couple <Device,
Language>:
Device: physical component of the system
that allows collecting information. This is the
lowest level of abstraction of the modality.
(for example: keyboard, mouse ...);
Language: defines a set of data understood by
the computer system.
Txupito also has a device and a language part. The
device part is the Physical layer and the Concrete
Object, the language part is the Abstract Object. The
Interpreter constitutes the bridge between these two
parts.
The first interface with two modalities was the
"put that here" of R. Bolt (Bolt, 1980). J. Coutaz and
L. Nigay (Nigay, L. and Coutaz, 1994) have
structured multimodality via the CARE properties
(see Section 5.3). This model aims to combine a set
of modalities. These properties are the following:
Complementarity, Assignment, Redundancy, and
Equivalency.
Complementarity between devices or interactions
languages, expresses the need of every device or
interaction language to get a complete command.
The use of several devices or interactions languages
may be parallel or sequential. For example, the user
must identify himself via a password and via his
fingerprint to validate identification. He must
perform both actions.
Assignment expresses the obligation to use a
device for a given interaction language or a
particular interaction language for a task. This
property expresses the absence of choice. For
example, the only way to turn a computer on is to
use the button provided for this purpose.
Redundancy The use of two different interactions
contributes to reliability the data collected. For
example, using a microphone to capture the voice of
a user and, to make the system more reliable, adding
a camera which observes the motion of his lips.
Those will allow increasing the robustness of the
speech recognition system for example when there is
noise.
Equivalency of modalities is satisfied if each
device or interaction language achieves the same
goal in producing the same data. For example, a
computer provides a user the possibility to use the
mouse. This allows him to move the elevator of a
page through the widget or to use the mouse wheel.
These two interactions are equivalent. User may use
either one or the other.
8.2 Interactor Model
The CNUCE interactor has been introduced by
Faconti et Paterno in the 90’s (Faconti and Paterno,
1990); (Paternò and Faconti, 1992) to help
interaction between an HCI and a user. It is a
component of the user HCI that can operate in
parallel with others interactors. Moreover, they
define it as a feature of an interactive system able to
react to external stimuli, resulting in a high level of
data abstraction to a lower abstraction level and
vice-versa.
Duke and Harrisson in 1993 (Duke and Harrison,
1993), developed the York model. The difference
from CNUCE, is that it is possible to model more
precisely the interactive dialog system. The state of
the interactor is explicitly described.
The Cert Interactor (Roché, 1998) allows the
description of an interactive system with a language
based on data streams.
These interactors are designed for graphical
Txupito-AnInteractorComponentModelforAmbientHCI
73

interfaces while Txupito can be used for graphical
interfaces or not (tactile vibrations, speech synthesis,
voice recognition, etc.).
Markopoulos (Markopoulos et al., 1997);
(Markopoulos 2001) defines an interactor as a
primitive abstraction used in the description of an
interactive system. This abstraction can be
considered as similar to software architecture
abstractions of objects in object-oriented
programming. There is no difference between an
input interactor and an output interactor. It is
difficult to identify the associated modalities. For
Txupito we choose to make a difference between
input, output and input with feedback interactors
because it is closer to the well known widget model.
Then, there is the Comet interactor introduced by
(Daâssi et al., 2003); (Calvary et al., 2004). They
define it as “an introspective interactor that
publishes the quality in use it guarantees for a set of
contexts of use. It is able to either self-adapt to the
current context of use, or be adapted by a tier-
component. It can be dynamically discarded (versus
recruited) when it is unable (versus able) to cover
the current context of use”. Txupito is an ubiquitous
interactor but the adaptation is not done on the
interactor itself but through the Kalimucho platform
directly on the architecture of the application.
Interactors and Business Components achieving the
complete applications are seen as software
components linked by connectors and the
reconfigurations concerns as well Interactors than
Business Components. It is so possible to adapt the
complete application to the context and to users’
needs.
8.3 Plateforms
8.3.1 WComp
WComp (Cheung-Foo-W et al., 2006) is a
lightweight component-based approach for
designing composite web services. It provides a
framework allowing applications to be constructed
in the form of web services graphs based on the
Container concept. It also provides a middleware
based on the concept of Aspects of Assembly used
to adapt the web services. The WComp framework
is based on the SLCA paradigm, Service Lightweight
Component Architecture (Cheung-Foo-W et al.,
2006); (Hourdin et al., 2008). This paradigm
combines the principles of event-based web services
paradigm and components paradigm.
8.3.2 Kalimucho
The LIUPPA (Da et al., 2014); (Dibon et al., 2013)
creates a platform called Kalimucho. This platform
allows building and structuring an application as an
assembly of software components. The resulting
system has properties of reusability (reusability of
components), partitioning (cutting in components),
optimization (assembly of components) and
adaptation (architecture configuration). A
component gives a specific service and can be linked
to others components in order to achieve a complete
user's service.
8.3.3 Why Kalimucho for Txupito?
Instead of using WComp, we choose to design the
Txupito interactor for the Kalimucho platform
because Kalimucho offers reconfiguration at
runtime. Indeed, in order to improve users’
interaction experience, parts of the HCI need to be
moved, created or deleted on a device at runtime.
Moreover, the platform is intrusive: it measures
context changes constantly and applies needed
modifications dynamically. For example, in our
scenario, if the battery of the speaker's smart phones
goes low, the platform automatically migrates the II
for changing slides to the laptop.
9 CONCLUSION
We have presented the Txupito interactor model, its
general architecture and the CARE operators to
combine interactions. Txupito is an interactor for
pervasive and ambient interfaces. The
implementation of these interactors is similar to a
software architecture made of components
connected with connectors (traditional approach). It
is here implemented with the help of the Kalimucho
platform. This platform allows the applications to be
distributed on different devices and re-configured
while running. Txupito has its own architecture
allowing the evolution of modalities on several
devices, including operators.
Such new functionalities raise several problems –
not addressed here – in term of engineering. The
design of distributed HCI including the evolution of
interactions needs a new approach to design scaled
applications.
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
74

REFERENCES
Nigay, L., Coutaz, J., Espaces conceptuels pour
l'interaction multimédia et multimodale, TSI, special
Multimédia et Collecticiel, AFCET & Hermes Publ.,
Vol 15(9), pp. 1195-1225, (1996).
Bolt, R., Put that there: Voice and gesture at the graphics
interface. Computer Graphics, p. 262-270 (1980).
Nigay, L., Coutaz, J., Les propriétés “CARE” dans les
interfaces multimodales, lille, IHM’94 p7-14 (1994).
Faconti G, Paterno F, An approach to the formal
specification of the components of an interaction. In
C. Vandoni and D. Duce editors, Eurographics 90, pp
481-494, Noth- Holland, (1990).
Paternò, F. and Faconti, G On the use of LOTOS to
describe graphical interaction. In Proceedings of the
HCI'92 Conference on People and Computers VII,
Graphics - Design and Techniques, pages 155-173
(1992).
Duke, D. J. and Harrison, M. D. Abstract interaction
objects. In Hubbold, R. J. and Juan, R., editors,
Eurographics '93, pages 25-36, Oxford, UK.
Eurographics, Blackwell Publishers (1993).
Roché, P., Modélisation et validation d'interface homme-
machine. Doctorat d'université, École Nationale
Supérieure de l'Aéronautique et de l'Espace, (1998).
Markopoulos, P., Rowson, J., Johnson, P. Composition
and Synthesis with a Formal Interactor Model,
Interacting with Computers, 9, 197-223. (1997).
Markopoulos, P., Interactors : formal architectural
models of user interface software. In Kent, A. and
Williams, K.G, (Eds) Encyclopedia of
Micocomputers, Volume 27 (Supplement 6), Marcel
Dekker, New York, pp 203-235 (2001).
Olfa Daâssi, Gaëlle Calvary, Joëlle Coutaz, Alexandre
Demeure. Comet: a new generation of widget for
supporting user interface plasticit. IHM 2003
Proceedings of the 15th French-speaking conference
on human-computer interaction on 15eme Conference
Francophone sur l'Interaction Homme-Machine Pages
64-71(2003).
Gaëlle Calvary , Joëlle Coutaz , Olfa Dâassi , Lionel
Balme , Alexandre Demeure, Towards a new
generation of widgets for supporting software
plasticity: the “comet” (2004).
Keling Da, Marc Dalmau, Philippe Roose – Kalimucho :
Middleware for Mobile Applications – ACM SAC
2014 – pp. 413-419 – ACM Press – 24-28/03 –
Gyeongju, Korea, (2014).
Pierre Dibon, Marc Dalmau, Philippe Roose – Ubiquitous
Widgets – Designing interactions architecture for
adaptive mobile applications – International workshop
on Internet of Things – Ideas and Perspectives (IoTIP-
13), In conjunction with IEEE DCOSS 2013, pp. 331-
336 – DOI 10.1109/DCOSS.2013.32, May 21-23,
2013, Boston, USA (2013).
Daniel Cheung-Foo-Wo, Jean-Yves Tigli, Stephane
Lavirotte, Michel Riveill - Wcomp: a Multi-Design
Approach for Prototyping Applications using
Heterogeneous Resources - IEEE International
Workshop on Rapid System Prototyping'06, pp. 119-
125, (2006).
V.Hourdin, J.Y. Tigli, S. Lavirotte, G. Rey, and M.
Riveill. SLCA, composite services for ubiquitous
computing. In Jason Yi-Bing Lin, Han-Chieh Chao,
and Peter Han Joo Chong, editors, Mobility
Conference, page 11. ACM, (2008).
Leap Motion - https://www.leapmotion.com/
Txupito-AnInteractorComponentModelforAmbientHCI
75
