
Combined Modelling and Programming Support for Composite
States and Extensible State Machines
Kjetil Andresen, Birger Møller-Pedersen and Ragnhild Kobro Runde
Department of Informatics, University of Oslo, Oslo, Norway
Keywords: State Machine, Design Pattern, Modelling, Programming.
Abstract: Most modelling languages support full state machine modelling, including especially composite states.
Existing approaches to programming with states (state design patterns) either represent composite states by
means of inheritance between state classes, or do not support composite states, and instead use inheritance
for specialization of extensible state machines. In this paper, we present 1) a state design pattern using
delegation to support composite states and inheritance together with virtual classes to support extensible
state machines, and 2) a framework, implemented in Java, which also supports history and entry/exit
actions. Together, these form the basis for developing support for state machines in a combined modelling
and programming language.
1 INTRODUCTION
In order to avoid inconsistent model and program
artefacts when using both modelling and
programming languages during software
development, (Madsen and Møller-Pedersen 2010)
proposed the definition of a combined modelling and
programming language. The definition of such a
language should be based on an analysis of how
central modelling concepts can be supported by
programming language mechanisms, and vice versa.
As one step in that direction, this paper reports from
an investigation on programming language support
for the modelling mechanisms of state machines,
from simple state design patterns to the use of
advanced programming language mechanisms. It has
been an aim to rely as much as possible on existing
mechanisms and not just introduce new mechanisms
in order to support the combination.
We require all of the most commonly supported
mechanisms in modelling languages: composite
states, history, entry and exit actions, and
specialization of state machines. These are e.g.
supported by SDL (ITU 2011) and UML (OMG
2011).
The starting point for our approach is the state
design pattern in (Gamma, Helm et al. 1995) which
is commonly used when programming state
machines. States are represented as objects of state
classes, while events and their corresponding
transitions are represented by event methods. The
original state design pattern only supports simple
state machines; there is e.g. no support for
composite states, entry/exit actions and history.
Recent state design patterns support composite
states. As already introduced in 1987 (Harel 1987) a
composite state is a state with substates (contained
states) such that all events and corresponding
transitions that apply to the composite state by
default apply to all of the substates, unless specified
differently. State design patterns usually represent
composite states by means of inheritance: classes for
substates are defined as subclasses of the class for
the composite state. The event methods of the
composite state are therefore inherited, and event
methods may be overridden for the substates where
the default behaviour specified for the composite
state shall not apply. This works for pure composite
states, but cannot be used in combination with
entry/exit actions on states, as entry/exit actions of
the enclosing state should usually not be inherited.
Another development on state design patterns is
the notion of extensible state machine pattern (Chin
and Millstein 2008), which allows the extension (by
inheritance) of state machines by adding states and
events methods, and by overriding states. However,
using inheritance for extension implies that this
pattern does not support composite states.
In order to support both composite states and
specialization of state machines we therefore pursue
231
Andresen K., Møller-Pedersen B. and Runde R..
Combined Modelling and Programming Support for Composite States and Extensible State Machines.
DOI: 10.5220/0005237302310238
In Proceedings of the 3rd International Conference on Model-Driven Engineering and Software Development (MODELSWARD-2015), pages 231-238
ISBN: 978-989-758-083-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

the idea of representing composite states by state
objects that are linked by delegation. Inheritance
may then be used for specialization of state
machines. With the delegation link from a substate
object to the enclosing state object, an event method
call on a substate that does not define this event
method will be delegated to the composite state.
In order to support entry/exit actions and history,
the design pattern above, with delegation and
inheritance, has to be combined with a framework of
predefined classes for e.g. states.
The remainder of this paper is organized as
follows: Section 2 introduces our running example.
In section 3 we introduce our framework. Section 4
describes how we support composite states. Section
5 describes how inheritance may be used to support
specialization of state machines, by applying a
pattern for extensible state machines to our
composite state approach, and finally we show that a
language with support for virtual classes would be
the optimal for a combined modelling and
programming language. Section 6 compares the
resulting framework with related approaches, and
section 7 concludes the paper.
2 MEDIA SWITCH EXAMPLE
For the purpose of illustrating our approach we use a
simple state machine.
Figure 1 is the simple state machine of a media
switch. It specifies that the initial state of the media
switch will be
Off (indicated by the black dot with
arrow). When powered on it will enter the composite
state
On with its initial state CD. The mode is
changed by the mode event. At any state in
On the
switch may be powered off (by the event
off),
entering the state
Off.
Figure 1: State Machine of a Media Switch.
The state On has an entry action that is executed
whenever
On is entered; turning on the display
backlight, and an exit action that is executed
whenever
On is exited, turning off the backlight.
Note that due to space limitations, we have not
illustrated the use of history and entry/exit points,
although they are supported. If e.g. the
on transition
from
Off to On had targeted the history of On and
not the On as such, then the first time it would enter
the initial state
CD, while subsequent On transitions
from
Off would enter the state that On were in (CD
or
TV) when it was turned off.
3 FRAMEWORK BASED UPON
THE STATE DESIGN PATTERN
The original state design pattern (Gamma, Helm et
al. 1995) represents each state as an object of a state
class, with an event method for each event that
applies to this state. The state machine has the same
event methods, and calls of these are forwarded to
the current state (maintained by a variable in the
state machine), in order to be handled specifically
for this state. An event method performs some
action, followed by a transition to the next state by
changing the current state variable.
The actual employment of the state design pattern
depends on the mechanisms in the given language.
We will assume that the language supports inner
classes, so that the state classes can be defined as
inner classes to the state machine class. In order to
support our required mechanisms, we combine the
state design pattern with a framework in terms of a
pre-defined class
StateMachine with an inner class
State; a specific state machine is then defined by a
subclass of
StateMachine with subclasses of
State.
The
MediaSwitch state machine is defined as a
subclass of
StateMachine with a subclass (in our
example
SwitchState) of State, and finally
specific states as subclasses of
SwitchState, see
Figure 2, here only illustrated with
Off and On.
Both
MediaSwitch and SwitchState implements
the event methods specific for this machine. The
substates of
On will be added to the example in the
next section.
In this framework, the
StateMachine class
includes the method
cS that returns the current state.
All event method calls to a state machine shall be
forwarded to the current state via the
cS method.
Without utilizing additional language mechanisms,
cS would have to be typed by State:
abstract class StateMachine {
private State cS(){...};
...
}
MediaSwitch
On
Off
on
off
TV
CD
mode
mode
entry/
exit/
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
232
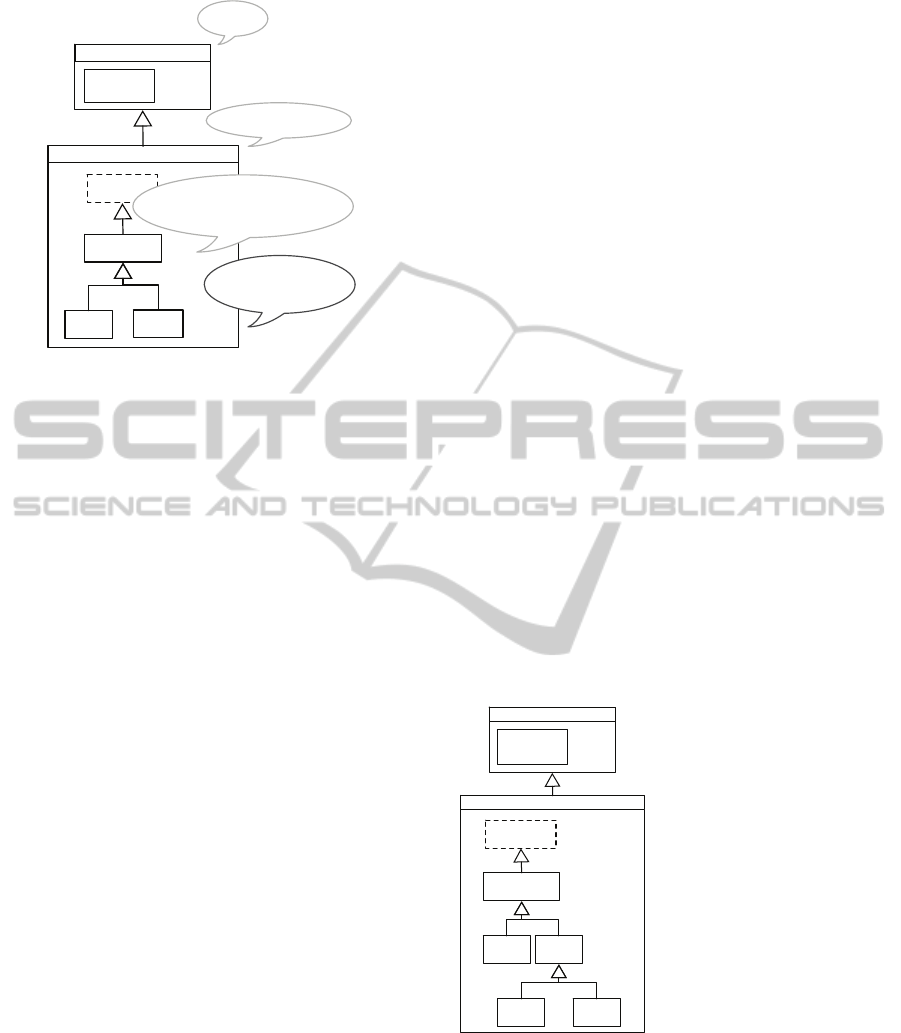
Figure 2: Use of the Framework.
The forwarding calls to the state maintained by
cs would then have to be casted to the specific
subclass of
State in order to get access to the
specific event methods defined in this subclass. As
such type-casts are error-prone, we have in our
framework instead made the class
StateMachine
generic with a type parameter
StateType that
represents the type of the states in the state machine,
see Figure 3.
StateType is a subtype of IState
defining all the event methods. It is therefore based
upon an interface
IState that defines what is
common to all states: entry/exit actions (in terms of
methods) and an initial state (used in case of
composite states).
Figure 3: Generic State Machine Framework.
As the framework is implemented in Java with its
support for generics, we represent states by means of
Class objects. A Class object is the object that
represents a class, so given the state class On, the
expression
On.class yields the Class object for
the class
On. The type of initialState is
Class<? extends StateType>, as it shall be
prepared for state classes that implement at least
IState. For our media switch, the interface IMedia
must therefore extend the
IState interface and
define the event methods that are specific for this
state machine.
While a pure state design pattern approach would
make the state machine class (including the inner
state classes) specifically for the state machine at
hand, the framework classes
StateMachine and
State provides the machinery for handling
entry/exit actions, entry/exit points and history.
4 COMPOSITE STATES
4.1 Composite States by Inheritance
An obvious way of representing composite states in
the state design pattern is to represent the substates
by subclasses of the class for the composite state.
Recall from above that for the composite state
On
the thing is that the event
off shall apply to all
substates (at any level) in
On and perform the same
transition (to
Off). This is precisely what happens
when the event method
off is defined in class On
and inherited (but not overridden) by the subclasses
CD and TV, see Figure 4. Note that the graphical
illustrations are just showing the class hierarchies,
not the implemented interfaces and the generics –
they are part of the corresponding code fragments.
Figure 4: Implementation of the Media Switch state
machine using inheritance.
Support for entry/exit points and shallow/deep
history may be added to this approach to composite
states. However, this approach does not work for
entry and exit actions. The reason for this is that
entry/exit actions of a composite state shall not
MediaSwitch
State
State
Switch
State
Off
On
StateMachine
Frame
work
Specific
state machine
State class with
event methods for
this state machine
States of this
state machine
...
interface IState {
public void entry();
public void exit();
public Class<? extends IState> initialState();
}
abstract class StateMachine <StateType extends IState> {
private StateType cS(){...}; //current state
Class<? extends StateType> initialState();
class State implements IState {
public Class<? extends StateType> initialState() { ... }
}
...
}
State
StateMachine
MediaSwitch
State
Switch
State
Off On
CD TV
interface IMedia extends IState{
public void on();
public void off();
public mode();
}
class MediaSwitch
extends StateMachine<IMedia>
implements IMedia {
public void on(){cS().on()};
public void off(){cS().off()};
public void mode(){cS().mode()};
class SwitchState extends State
implements IMedia {
void on(){};
void off(){};
void mode(){};
}
class Off extends Switch {
void on(){changeState(On.class);}
}
class On extends Switch {
void off(){changeState(Off.class);}
}
class CD extends On {
mode(){changeState(TV.class);}
}
class TV extends On {
mode(){changeState(CD.class);}
}
...
}
CombinedModellingandProgrammingSupportforCompositeStatesandExtensibleStateMachines
233

apply to the substates, while using inheritance for
the substates will imply that they inherit also the
entry/exit actions. In our example, if the states
CD
and
TV inherit the entry/exit actions of the enclosing
state On
, then changing back and forth between the
states CD
and TV (by the event mode) would imply
that the display backlight would be turned on and off
for each state change. Existing approaches using
inheritance for representing composite states do not
provide a solution to the unwanted inheritance of
entry/exit actions. In the following we will therefore
pursue a different way of representing composite
states.
4.2 Composite States by Delegation
In order to avoid the above-mentioned problem of
entry/exit actions in combination with composite
states by means of inheritance, we employ
delegation instead of inheritance. With delegation,
an event method call to a state is delegated to its
enclosing (composite) state in case the event method
is not defined specifically for the current state.
The benefit of using delegation is that it is a well-
known mechanism; in addition we do not have to
invent a mechanism just for the purpose of
composite states. Delegation was first introduced in
(Lieberman 1986) as a means to share behaviour
specifications between objects in prototype-based
languages, i.e. languages with only objects and not
classes, and it is often used as an alternative to
inheritance in prototype languages. Delegation is a
mechanism that is often considered an alternative to
inheritance, but taken literally there is no reason that
a language may not support both inheritance and
delegation. Inheritance is a mechanism for
specifying specialization and therefore a relationship
between classes, while delegation is a relationship
between objects.
In the delegation approach to composite states,
each substate object will have a delegation link to its
composite state object, as illustrated for our media
Figure 5: Class diagram and object diagram with
delegation links for the MediaSwitch state machine.
switch example in Figure 5. The SwitchState
root state is now reached when event method calls
are delegated to the root (i.e. not handled in any of
the other states).
While an inheritance approach creates the
composite states by making the state class/subclass
hierarchy, a delegation approach must specify the
state structure. The delegation links in the right part
of Figure 5 are links of a general delegation
association from State to State. The composite state
structure is set up as part of the constructors for the
state classes. Each constructor gets a reference to the
enclosing state object as a parameter. In Figure 6 it
is demonstrated that the state CD will have On as it
enclosing state
(super(On.class) in the
constructor for
CD), while On will have the root state
SwitchState as its encloser.
The delegation approach as illustrated in Figure 5
and Figure 6 is the simplest alternative, with all
states being subclasses of
State, and the state
hierarchy being maintained by delegation links.
State only provides the most basic framework
methods, all state classes have to implement the
appropriate interface, and users of the framework
have to insert code that delegates a call of an event
method (e.g.
enclState().off()in the event
method
off in state CD in Figure 6) to a call on
the enclosing state. In case a call of an event
method shall not be delegated, the ordinary
changeState method is used, e.g.
changeState(On.class) in the event method
on
in state Off in Figure 6.
Figure 6: MediaSwitch by using delegation.
interface IMedia extends IState{
public void on();
// similar for off and mode
}
class MediaSwitch
extends StateMachine<IMedia>
implements IMedia {
public void on(){cS().on()};
// similar for off and mode
class SwitchState extends State
implements IMedia {
void on(){};
// similar for off and mode
}
class On extends State implements IMedia {
On(){super(Switch.class)}
void on(){ enclState().on(); }
// similar for off and mode
}
class Off extends State implements IMedia {
void on(){ changeState(On.class); }
// similar for off and mode
}
class CD extends State implements IMedia {
CD(){ super(On.class); }
off(){ enclState().off(); }
// similar for off and mode
}
...
}
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
234

4.3 Framework Implementation
As Java does not support delegation, our framework
implemented in Java
1
uses a delegation design
pattern in order to represent composite states by
delegation.
In the same way as the framework defines the
class
State as a superclass for all specific state
classes, the framework also defines superclasses for
entry/exit points and shallow/deep history.
Entry/exit actions are in the framework defined as
methods in the class
State; these may then be
overridden in specific states, but the framework will
ensure that they are called in the right order when
states are entered/exited.
In order to support transition to shallow history
states, the framework ensures that each time a state
is entered, the state is set as the shallow history of its
immediate enclosing composite state. In order to
support transition to deep history states, each time
the current state changes, one will have to traverse
the state hierarchy from the current state and up to
the root state, and for all composite states on the
path store current state as their deep history.
5 SPECIALIZATION OF STATE
MACHINES
Modelling languages like SDL and UML have the
notion of specialization of state machines. A special
state machine may add states and events (with
transitions), it may extend inherited states and it may
override event methods from the general state
machine. Recently, (Chin and Millstein 2008) has
demonstrated how an extended notion of the state
design pattern can support state machines that may
be specialized, in (Chin and Millstein 2008) called
extensible state machines. This is achieved by not
using inheritance to specify composite states, but
rather use inheritance to specify extension. The
implication is that the state pattern only covers state
machines with simple states and not composite
states.
5.1 Extensible State Machine Design
Pattern
In the following we apply this extensible state
pattern to our delegation-supported composite states,
1
The source code of the framework is available at
http://folk.uio.no/kjetand/framework.zip
and thereby we get a state design pattern that
supports both composite states and specialization of
state machines. We start out with a simple
Switch
state machine and then define the
MediaSwitch
state machine as a specialization of this, see Figure
7.
With the extensible state machine design pattern,
a specialization is specified by defining a subclass of
the enclosing state machine class. Extending a state
so that it may handle additional events is done by
adding a new inner state class that extends the
corresponding class from the super state machine
class. This is illustrated in Figure 7 with the
On state
class, as this has to handle the new event
mode. In
addition, the simple
On state is extended to become a
composite state.
The code for the simple
Switch state machine is
illustrated in Figure 8. State objects are created
according to state classes. As an extended state
machine makes subclasses of some of the inherited
state classes, the extensible state pattern introduces
the rule that state objects must be created by factory
methods. These factory methods can then be
overridden in order to have objects of the specialized
state subclasses be generated instead of objects of
the (original) state superclasses. Instead of
referencing a state with name
<state name> by
means of ‘
<state name>.class’, it is therefore
referenced by a factory method ‘
state<state
name>, see Figure 8 for an illustration of this for
state
On (with factory method stateOn). The state
class
Off will have a similar factory method.
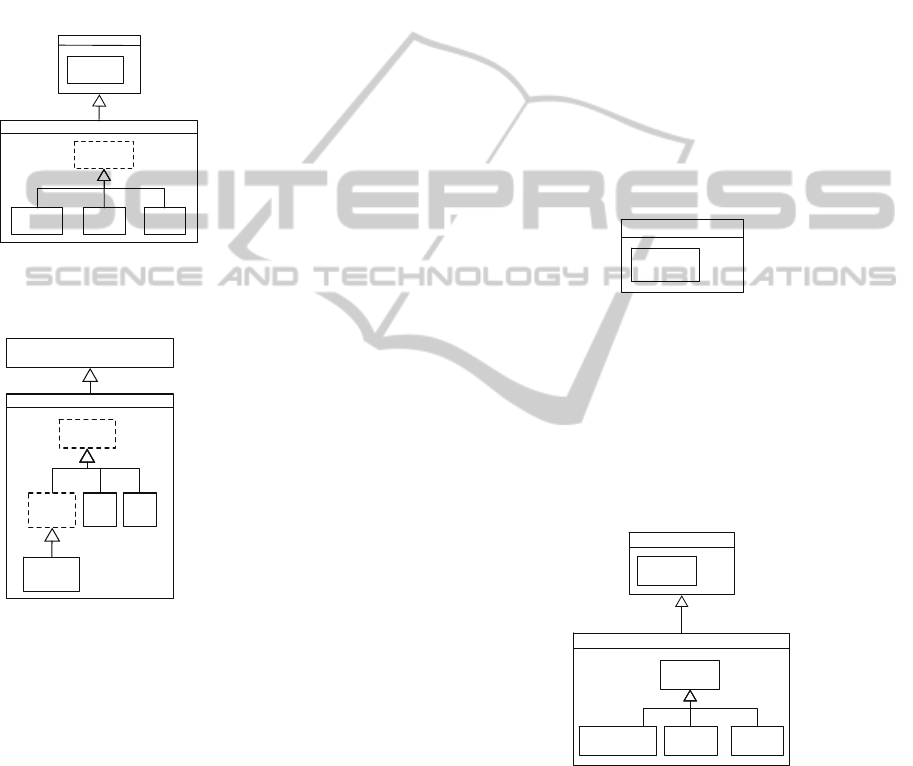
Figure 7: MediaSwitch as a specialization of Switch.
In the specialization of Switch in Figure 9, the
states that are extended in order to accept new events
or to become composite states are defined as
subclasses of the corresponding state classes from
the general state machine class. The corresponding
factory methods have to be overridden to generate
objects of these subclasses. As an example, the
specialized state
SpecialOn is a subclass of On (in
order to introduce both new events and new
MediaSwitch
On
TVCD
mode
mode
OnOff
on
off
Switch
CombinedModellingandProgrammingSupportforCompositeStatesandExtensibleStateMachines
235
substates) and the factory method stateOn is
overridden to reflect this extension.
Adding a new state to a specialized state machine
implies the definition of a new state class as a
subclass of
State, the setting of its delegation link
to its enclosing state, and a definition of the event
methods that shall apply in this state; all other
existing event method calls will be delegated to its
enclosing state.
Figure 8: Switch as a subclass of StateMachine.
Figure 9: MediaSwitch as a specialization of Switch.
5.2 Language Support for Extensible
State Machines
The extensible state machine design pattern is based
upon the existing language mechanisms of Java
(inheritance and generics), and we have shown
above that this may be combined with our approach
to composite states (by use of delegation). However,
although it works, it is cumbersome and error-prone
to have to make subclasses of the states that shall be
extended (in order to cope with new events or to be
changed from a simple state to a composite state),
and in addition override factory methods
correspondingly. In a combined modelling and
programming language we would rather look for an
existing programming language mechanism (as is
the case with delegation and inheritance) that
supports the extension of states.
Extension of states means extension of (inherited)
states classes. The solution would therefore be to
define the framework class
State as a virtual class
(Madsen and Møller-Pedersen 1989), see Figure 10.
Composite states are still handled by delegation. A
virtual class is just like a virtual method: it must be
an inner class, and in a subclass of the enclosing
class it may be given a new definition. While a
virtual method may be overridden (that is
completely redefined, except for its signature), a
virtual class can only be extended, as if making a
subclass of the virtual class. The reason that virtual
classes can only be extended is obvious: it must be
ensured that references typed by a virtual class can
only denote objects with at least the properties of the
virtual class.
Figure 10: State as a virtual class in the framework.
A specific state machine, in our case the Switch,
is then defined as a subclass of
StateMachine,
extending the virtual class
State so that it
implements the event methods for the switch (on
and
off), and then define the states of switch as
subclasses of the extended
State class, see Figure
11.
Figure 11: A specialized StateMachine with extended
State and specific states.
The new subclasses of State are defined to be
virtual classes as well, so that further specializations
may extend them. The extended virtual class
State
in
Switch is still virtual (although extended), so a
further specialization of
Switch may extend State
in order to add new event methods. In order to be
able to redefine event methods for given states and
On
Switch
State
Switch
State
Off
StateMachine
State
interface ISwitch extends IState{
public void on();
public void off();
}
class Switch
extends StateMachine<ISwitch> {
public void on(){cS.on()};
public void off(){cS.off()};
class SwitchState extends State
implements ISwitch{}
class Off extends State
implements ISwitch{
void on(){ changeState(stateOn);}
}
class On extends State
implements ISwitch {
void off(){ changeState(stateOff);}
}
//factory method for On
Class <? extends ISwitch> stateOn(){
return On.class;
}
...
}
MediaSwitch
Switch
On
State
CD TV
Special
On
interface IMedia extends ISwitch {
public mode()
}
class MediaSwitch<
StateType extends IMedia>
extends Switch<StateType> {
public void mode(){cS.mode()};
class SpecialOn extends On
implements IMedia{
SpecialOn(){
// set CD and TV as substates
}
public mode(){enclState().mode();}
}
class CD extends State
implements IMedia {...}
class TV extends State
implements IMedia {...}
...
//overriding factory method for On
Class <? extends StateType> stateOn(){
return SpecialOn.class;
}
...
}
vi r t ual
State
StateMachine
vi r t ual
On
Switch
ex t ended
State
vi r t ual
SwitchState
vi r t ual
Off
vi r t ual
State
StateMachine
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
236

events, the states of a state machine are also
represented by virtual classes (see
On and Off in
Figure 11).
Figure 12 illustrates how the
MediaSwitch is
defined as a subclass of
Switch. The class State is
extended in order to implement the new event
method mode, the states
CD and TV are added as
subclass of
State, and On is extended in order to
become a composite state.
The fact that the state classes of a state machine
are virtual classes implies that the construction of
the state hierarchy may be inherited and does not
have to be made again for specialized state
machines. As an example, the constructor for
Switch in Figure 11 will have a statement that
generates an
On state object and sets the encloser to
be an object of class
SwitchState.
The
MediaSwitch state machine inherits this
constructor, and as
On has been extended, the
inherited generation statement will now generate an
object of the extended
On. In this respect a virtual
class works the same way as a virtual method: like a
call of virtual method implies a call of the
overridden method in case the call is made in the
context of a subclass, generation of an object of a
virtual class will imply generation of the extended
class.
Figure 12: MediaSwith as a specialization of Switch.
As part of extending a virtual state class, it is
possible to override inherited event methods. In
principle an event method may be completely
overridden, i.e. changing also the next state of the
transition, and that is not desirable. A simple
solution is to define the event methods as non-virtual
(final in Java) and then rather define for each event
method a corresponding virtual action method that is
called by the event method.
Java does not support virtual classes. While it is
straightforward to obtain delegation by means of a
design pattern, virtual classes are not that easy to do
by a design pattern. The framework in Java therefore
does not support the solution with virtual state
classes. This is also the reason that this subsection
just has illustrations of the solution, no code
fragments. Except for the part of the code that
expresses virtual classes and their extensions, the
rest of the code, e.g. for the handling of events, will
be the same as already described.
With virtual state classes there is no need for
generics as described above. The
cS would be typed
by
State, and along with extension of State in
subclasses of
StateMachine the type of cS is also
extended.
6 RELATED WORK
As described in the introduction, the original state
design pattern does not cover composite states.
Most modelling languages have full support for state
machines directly as language mechanisms. Existing
state machine APIs in various programming
languages also support full state machines, but
without any attempts to integrate the state machine
mechanisms with the mechanisms of language.
Among the approaches that are integrated with
existing language mechanisms, the Actor model
(Hewitt, Bishop et al. 1973) was the first approach.
Actors can change state explicitly and thereby
accepting a new set of messages. This idea has later
been followed by proposals where an object may
change its class and thereby the methods it will
accept. The Modes approach (Taivalsaari 1993) also
belongs to the well-integrated approaches, and it is
directed towards supporting state-oriented
programming in that an object does not have to
change its class, only its virtual method dispatch
pointer. The solution in (Madsen 1999) takes the
Modes approach a little further in that it supports
composite states by means of state class inheritance.
State-Oriented Programming (Sterkin 2008) is
very similar to our approach. It recognizes that states
have to be defined by objects that are linked to
represent state hierarchies, but does not use
delegation.
A quite different approach is taken by Typestate-
Oriented Programming (Aldrich, Sunshine et al.
2009; Sunshine, Naden et al. 2011) supported by the
Plaid language. It is in line with Modes and with our
approach in that state mechanisms are well
integrated in the language, however, it only supports
simple states. The reason is that the main objective
is to define a corresponding type system that will
make it possible to check that objects behave in
accordance to the constraints specified by state
types.
MediaSwitch
Switch
ext e nde d
On
ext ended
State
vi r t ual
CD
vi r t ual
TV
CombinedModellingandProgrammingSupportforCompositeStatesandExtensibleStateMachines
237

None of the above approaches (except APIs, e.g.
Sterkin 2008) have support for entry/exit actions or
History.
7 CONCLUSIONS
While existing state design patterns either support
composite states by inheritance of state classes (and
then not specialization of state machines), or support
specialization of state machines by inheritance (but
then not support for composite states), our approach
supports both composite states and specialization of
state machines: delegation to handle composite
states, and inheritance together with generics to
support specialization of state machines.
Our approach is a combination of the state design
pattern and a framework that handles history,
entry/exit actions, and entry/exit points.
Our framework is implemented in Java.
Therefore, delegation is handled using a delegation
design pattern, and specialization is implemented,
not using the most elegant solution with virtual
classes, but instead by state subclasses and factory
methods. A combined modeling and programming
language with support for state machines according
to our approach would call for a language including
all of inheritance, delegation and virtual classes.
REFERENCES
Aldrich, J., J. Sunshine, S. Darpa and Z. Sparks (2009).
Typestate-Oriented Programming. Onward ´09,
OOPSLA´09, Orlando, Florida, USA.
Chin, B. and T. Millstein (2008). An Extensible State
Machine Pattern for Interactive Applications. ECOOP
2008. J. Vitek.
Gamma, E., R. Helm, R. Johnson and J. Vlissides (1995).
Design Patterns: Elements of Reusable Object-
Oriented Software, Addison-Wesley.
Harel, D. (1987). "Statecharts: A visual formalism for
complex systems." Science of Computer Programming
8(3).
Hewitt, C., P. Bishop and R. Steiger (1973). A Universal
Modular Actor Formalism for Artificial Intelligence.
International Joint Conference on Artificial
Intelligence.
ITU (2011). Z.100 series, Specification and Description
Language.
Lieberman, H. (1986). "Using prototypical objects to
implement shared behavior in object-oriented
systems." ACM SIGPLAN Notices 21(11): 214–223.
Madsen, O. L. (1999). "Towards integration of state
machines and object-oriented languages." Technology
of Object-Oriented Languages and Systems: 261–274.
Madsen, O. L. and B. Møller-Pedersen (1989). Virtual
Classes—A Powerful Mechanism in Object-Oriented
Programming. OOPSLA'89 – Object-Oriented
Programming, Systems Languages and Applications,
New Orleans, Louisiana, ACM Press.
Madsen, O. L. and B. Møller-Pedersen (2010). A Unified
Approach to Modeling and Programming. MoDELS
2010, Oslo, Springer.
OMG (2011). UML - Unified Modelling Language.
Sterkin, A. (2008). State-Oriented Programming.
Muliparadigm Programming with Object-Oriented
Languages.
Sunshine, J., K. Naden, S. Stork, J. Aldrich and É. Tanter
(2011). First-Class State Change in Plaid.
OOPSLA’11, Portland, Oregon, USA, ACM.
Taivalsaari, A. (1993). "Object-Oriented Programming
with Modes." Journal of Object-Oriented
Programming 6(3): 25-32.
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
238
