
Resource-aware State Estimation in Visual Sensor Networks with
Dynamic Clustering
Melanie Schranz and Bernhard Rinner
Institute of Networked and Embedded Systems, Alpen-Adria-Universit
¨
at Klagenfurt, Klagenfurt, Austria
Keywords:
Visual Sensor Network, Resource Distribution, Wireless Communication, Negotiation Theory, Decentralized
Processing.
Abstract:
Generally, resource-awareness plays a key role in wireless sensor networks due the limited capabilities in
processing, storage and communication. In this paper we present a resource-aware cooperative state estima-
tion facilitated by a dynamic cluster-based protocol in a visual sensor network (VSN). The VSN consists of
smart cameras, which process and analyze the captured data locally. We apply a state estimation algorithm
to improve the tracking results of the cameras. To design a lightweight protocol, the final aggregation of the
observations and state estimation are only performed by the cluster head. Our protocol is based on a market-
based approach in which the cluster head is elected based on the available resources and a visibility parameter
of the object gained by the cluster members. We show in simulations that our approach reduces the costs for
state estimation and communication as compared to a fully distributed approach. As resource-awareness is
the focus of the cluster-based protocol we can accept a slight degradation of the accuracy on the object’s state
estimation by a standard deviation of about 1.48 length units to the available ground truth.
1 INTRODUCTION
In wireless sensor networks (WSNs), cooperative
control and distributed processing opened up a wide
research field. It is a very popular topic, e.g., in mo-
bile robots, unmanned vehicles, automated highway
systems, industrial process or environmental monitor-
ing (Ren and Beard, 2005). WSNs are constituted of
spatially distributed sensor nodes to retrieve informa-
tion from the environment and react on it. The indi-
vidual sensor nodes in such a network communicate
wirelessly and their actions are also autonomous with
respect to the received information. Furthermore, the
individual sensor nodes in a WSN are able to learn
from its environment especially through exchanging
locally retrieved information among themselves. A
typical characteristic of sensor nodes used in an ad-
hoc WSN are the limited resources. They are usu-
ally battery powered, have a bounded communication
range and limited on-board processing and storage ca-
pabilities.
Throughout this paper, we consider only networks
consisting of visual sensors communicating wire-
lessly. Visual sensor networks (VSNs) consist of au-
tonomous low-power image sensors with storage and
communication capabilities as well as a processing
unit on board (Soro and Heinzelman, 2009). Thus,
they have the ability to analyze and process the data
locally. A typical task of a VSN is to identify and
track objects for surveillance and identification appli-
cations.
The object is usually described by a state, in-
cluding the position, the velocity or other character-
istics of the object. A VSN with overlapping field
of views (FOVs) and thus multiple observations of
the same target simultaneously, asks for aggregat-
ing them to a joint, improved observation. To com-
pute a global state, the individual observations are ex-
changed among the cameras and aggregated locally.
These aggregated observations serve as input to state
estimation algorithms.
A typical approach for state estimation in a VSN is
to forward the observations to a central unit. This unit
aggregates the observations and performs a global
state estimation algorithm. Another possibility in
state estimation is to use a fully distributed approach.
Each camera exchanges its observations with the
other cameras in the VSN and performs global state
estimation. In this paper we propose a lightweight
resource-aware cluster-based protocol. In a mod-
ified market-based approach—proposed by (Esterle
et al., 2014)—we elect a cluster head responsible for
15
Schranz M. and Rinner B..
Resource-aware State Estimation in Visual Sensor Networks with Dynamic Clustering.
DOI: 10.5220/0005239200150024
In Proceedings of the 4th International Conference on Sensor Networks (SENSORNETS-2015), pages 15-24
ISBN: 978-989-758-086-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

state estimation incorporating the observations from
its cluster members. The role of the cluster head is
handed over to a cluster member if the available local
resources decrease. Comparing the cluster-based to
the centralized approach, scalability is increased and
there is no longer the risk of a single point of failure.
Further, in resource-aware VSNs the fully distributed
approach stresses the camera’s capabilities in com-
munication and processing due to the high amount of
messages to be exchanged. Further, their observations
are processed simultaneously and thus leading to re-
dundant results on each camera.
This paper provides two scientific contributions
with a focus on resource-awareness: (i) Utilized by
the market-based approach we perform dynamic clus-
ter management including cluster head election and
handover. (ii) With evaluations in a simulation envi-
ronment we show the advantages in terms of resource-
awareness of the proposed cluster-based protocol over
the fully distributed approach. A state estimation al-
gorithm is incorporated for both approaches.
The paper is organized as follows: Section 2
presents the related work to state estimation and clus-
tering methods in VSNs. In Section 3 we define the
system model for the cluster-based approach. Further,
Section 4 describes the underlying market-based ap-
proach as well as the state-space model. Section 5
shows the cluster-based protocol and the incorpora-
tion of the state estimation algorithm. In Section 6 we
evaluate the proposed protocol and discuss the simu-
lation results. Finally, Section 7 concludes the paper
and gives an outlook on future work.
2 RELATED WORK
In our approach we focused on related work concern-
ing cooperative state estimation and clustering meth-
ods in VSNs.
Cooperative state estimation is a well-known re-
search topic in VSNs to optimize an object state.
There exist already approaches for fully distributed
systems having an underlying linear state-space
model (Olfati-Saber and Sandell, 2008). Several
authors in (Ding et al., 2012), (Song et al., 2011)
and (Soto and Roy-Chowdhury, 2009) propose the
distributed Kalman-Consensus Filter (KCF) for dis-
tributed state estimation in camera networks. For a
non-linear state space model, there exist other filters
like the Extended Kalman Filter, the Particle Filter or
the newly approached Cubature Kalman Filter. In the
work of (Bhuvana et al., 2013) we made a compari-
son between these three filters for distributed state es-
timation in VSNs. The best trade-off in terms of com-
putational complexity and estimation accuracy when
modeling non-linear states, is achieved with the Cu-
bature Kalman Filter.
Nevertheless, in a VSN the limited resources of
the cameras need to be managed accordingly. One ap-
proach to reduce the participating nodes and thus save
resources, is clustering. The literature describes two
main strategies for clustering: (i) In a static cluster
the nodes are assigned offline to a specific cluster and
do not change over the network’s lifetime (Chaurasiya
et al., 2011), (Zahmati et al., 2007). (ii) In a dynamic
approach clustering is triggered by arising events in
the network as in (Medeiros et al., 2008), (Taj and
Cavallaro, 2011), (Mallett, 2006) and (Qureshi and
Terzopoulos, 2008). In (Mallett, 2006) and (Qureshi
and Terzopoulos, 2008) they use the term grouping in-
stead of clustering. Nevertheless, their task is to form
clusters having a qualifying parameter. In (Qureshi
and Terzopoulos, 2008) this qualifying parameter de-
scribes the extrinsic parameters of a PTZ-camera to
examine the cameras coverage over the object of in-
terest. Thus, they focus on distribute tracking per-
formance among the cameras. Further, in (Medeiros
et al., 2008) and (Qureshi and Terzopoulos, 2008)
it is necessary to exchange various messages among
the cluster members, e.g. to log-in/log-off from the
cluster. Also the coverage problem plays a role in
VSNs for air space surveillance as in (Hooshmand
et al., 2013) and (Torshizi and Ghahremanlu, 2013),
although the clustering process is directed via a cen-
tral unit. Especially for resource management of the
nodes in a VSNs there are several ideas: In (Chen
et al., 2008) they propose a handoff algorithm with
adaptive resource management that automatically and
dynamically allocates resources to objects with dif-
ferent priority ranks. Their resource management ap-
proach is to decrease the frame rate. Similarly it is
done in (Dieber et al., 2011), focusing on coverage as
well. In (Monari and Kroschel, 2010) a cluster head
selects cluster members to deliver tracking responsi-
bilities. Further, in (Younis and Fahmy, 2004) they
propose HEED (hybrid, energy-efficient distributed
clustering approach) for sensor networks. They se-
lect the cluster head based on the residual energy of
the node as well as neighbor proximity. Nevertheless,
the termination of the clustering approach is depen-
dent on the number of neighbors. A similar approach
is realized in (SanMiguel and Cavallaro, 2014). Nev-
ertheless, the communication overhead produced by
this clustering protocol is quite high and its usage for
battery-powered devices questionable.
In contrast to the existing research directions, our
objective is to establish a resource-aware approach for
smart cameras in VSNs. We adapt a market-based ap-
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
16

proach proposed in (Esterle et al., 2014) to design a
dynamic cluster-based protocol focusing on available
resources and a visibility parameter in order to elect a
single camera for state estimation. Contrary to (Song
et al., 2011), we reduce the overhead for communica-
tion by designing a lightweight cluster-based protocol
with a minimal number of messages to be exchanged
and thus, spare a node’s resources.
3 SYSTEM MODEL
In this paper we consider a VSN of a fixed set of cal-
ibrated smart cameras c
i
∈ C as illustrated in Figure
1. The task of the VSN is to monitor the given en-
vironment and thus to identify and track one or more
specific objects o
k
∈ O. We assume a perfect object
re-identification. Thus, each c
i
∈ C is aware of the
object’s global identifier. As these cameras are cali-
brated, they are able to calculate the object’s position
on the ground plane by applying a homography on the
object’s image plane coordinates. The object position
is referred to as observation. Since the cameras in
Figure 1 have overlapping FOVs, they have the abil-
ity to track a specific object o
k
simultaneously. This
enables cooperative work in the VSN. Cooperation is
achieved by exchanging their individual observations
and processing them accordingly.
Figure 1: VSN with spatially distributed smart cameras per-
forming multiple object tracking.
The objective of this paper is to present a resource-
aware protocol for cooperative state estimation in a
VSN by forming dynamic clusters—one per object
in the scene. A cluster is a subset of all cameras in
the network C
k
⊂ C, whereby a camera c
k
i
is a cluster
member of the cluster C
k
, if the camera has the object
o
k
in its FOV. Thus, this cluster is given as
C
k
:= {c
k
i
∈ C|c
i
∈ C ∧ o
k
in FOV} (1)
and c
k
h
represents the cluster head of C
k
.
The dynamics of the clustering is illustrated in
Figure 2. The individual figures show subsequent
time slots of a specific cluster C
k
. The camera marked
with an x is the cluster head c
k
h
with the responsibil-
ity to estimate the state for the specific object o
k
. All
cameras with gray colored FOVs indicate the pres-
ence of the object in their FOV. Cameras without an
x, but with a colored FOV, denote the cluster mem-
bers.
4 RESOURCE-AWARE STATE
ESTIMATION
In our approach the cluster head is responsible for the
collection of the object’s observations from all clus-
ter members and to perform cooperative state estima-
tion on them. For its election we propose a market-
based approach based on the work in (Esterle et al.,
2014). In this approach the tracking responsibility for
a specific object is autonomously distributed among
the cameras in the network. This market-based ap-
proach is used to elect a single camera as cluster head
out of all cluster members. Contrary to the approach
in (Esterle et al., 2014), all cluster members continu-
ously track the objects in their FOV.
4.1 Market-based Dynamic Clustering
Within the market-based approach we have two dif-
ferent interacting components: a camera owning the
object and cameras bidding for the object. In our case
the owner is the cluster head c
k
h
∈ C
k
with the respon-
sibility for auction initiation. The bidders are the clus-
ter members c
k
i
∈ C
k
and have the task to bid for an
object.
The primary step of the market-based approach is
to initiate an auction by the owner for a specific ob-
ject o
k
. The auction initiation is necessary to elect the
owner for the object o
k
in the next round. The possi-
bilities for auction initiation are described in Section
4.1.2. Subsequently, the cluster members c
k
i
track the
object in their FOV. With a set of parameters they bid
with an utility α
k
i
for the object at the owner’s side.
The composition of the utility α
k
i
is discussed in Sec-
tion 4.1.1.
In market-based clustering each camera (cluster
head c
k
h
as well as cluster member c
k
i
) tries to maxi-
mize its local utility A
i
which is given by
A
i
=
∑
k∈O
α
k
i
− p + r. (2)
The parameter p describes all payments made and the
parameter r all received payments in this iteration.
Resource-awareStateEstimationinVisualSensorNetworkswithDynamicClustering
17
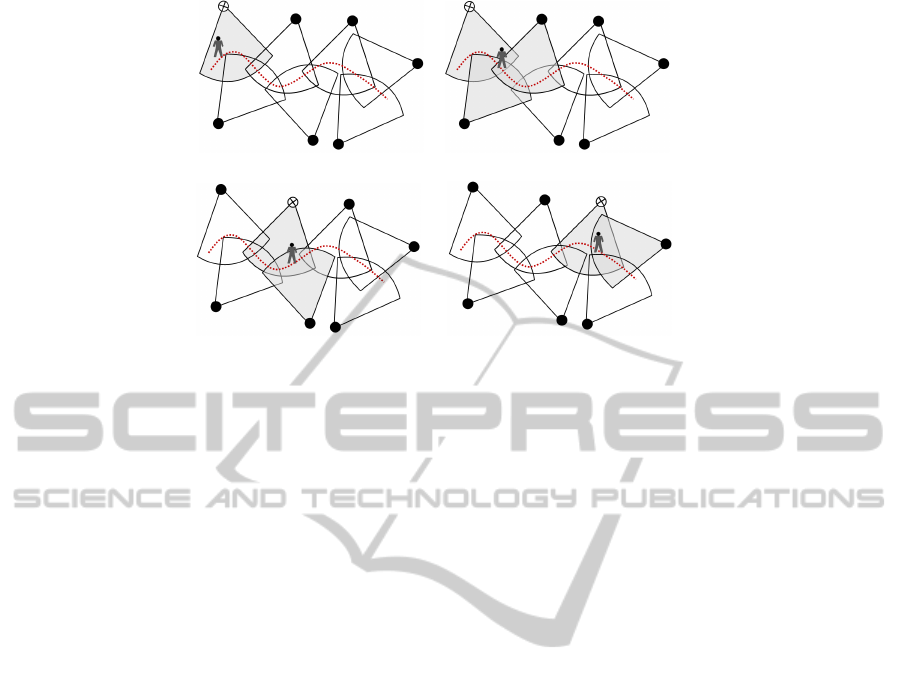
(a) (b)
(c) (d)
Figure 2: Dynamic clustering in a VSN. Figure 2(a) to Figure 2(d) show the clustering in specific time steps.
According to the Vickrey auction mechanism (Vick-
rey, 1961), the state estimation responsibility is trans-
ferred to the highest bidder, but at the price by the 2nd
highest bidder. This strategy imposes to bid truthful
valuations from the camera side instead of specula-
tions. If A
i
can be increased by selling o
k
, the owner
chooses the highest bidder to be the next owner of the
object o
k
and thus to become the next cluster head c
k
h
.
The estimation process and thus, the dynamic cluster
“follow“ the object’s trajectory through the network,
as illustrated in Figure 2.
4.1.1 Utility Definition
The utility α
k
i
is used as value to bid for an object o
k
in the FOV, if an auction is initiated by the current
cluster head c
k
h
. The utility is an election criterion
that can be defined with different parameters. In our
approach, the utility is based on two parameters: the
available resources on the camera and the confidence
in the tracking performance.
Storage, communication and processing power
are the most critical resources in VSNs. Especially
in VSNs with heterogeneous camera systems the
individual distribution of resources can express
how many tasks can be fulfilled by a specific cam-
era. The available resources are indicated with
R
total,i
, normalized in the range 0 6 R
total,i
6 1,
and can describe any resources the designer per-
ceives to pay attention to. As already mentioned,
we typically pay attention to exchanging, process-
ing and storing the observations retrieved by the
visual sensor. The task of sensing is ignored in
the resource model, due to its continuous execu-
tion. The resources totally available are described
with
R
total,i
=
∑
λr
= λ
0
∗
∑
[r
k
W L
] + λ
1
∗ r
E,i
+ λ
2
∗ r
MEM,i
+ λ
3
∗ r
COMM,i
. (3)
The parameter λ = [λ
0
, . . . ,λ
3
] with
∑
λ = 1 indicates
the weights of the resources we pay attention to. The
individual resources are denoted with i) r
k
W L
as the
workload for each object o
k
in terms of processing
power, ii) r
E,i
as the total energy available on the
node, iii) r
MEM,i
as the total memory available on the
node and iv) r
COMM,i
as the amount of communica-
tion performed. Each parameter is a normalized value
between 0 and 1. For the cluster-based protocol pre-
sented in Section 5 and the corresponding evaluation
in Section 6 we use the parameter r
E,i
, solely. There-
fore, we set the parameter λ
1
= 1, all others are 0.
Thus, we only consider the total energy available on
each camera c
i
as we focus on battery powered smart
cameras.
The other parameter used for calculating the util-
ity is the local confidence in the tracking performance
of the camera on the object o
k
. The confidence,
denoted with ζ
k
i
, can be obtained in various ways.
One approach is to derive the confidence out of the
matched features when comparing the tracked object
to a given model. Another possibility is to use ζ
k
i
as a
visibility parameter described as a binary value [0;1].
A 1 indicates that the object o
k
can be detected in the
FOV of camera c
i
. With a 0 we express that the object
is not detected. Thus, ζ
k
i
can be considered as mem-
bership function being a part of the cluster or not. The
utility α
k
i
is then defined as
α
k
i
= ζ
k
i
∗ R
total,i
. (4)
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
18

The utility α
k
i
is only positive, and thus a valid bid, if
the object o
k
is visible to camera c
i
.
4.1.2 Auction Initiation
With auction initiation by the cluster head we start the
election of the cluster head for the next time step. The
election is necessary, to select a camera with sufficient
resources and confidence of the tracking performance.
If the cluster head sells the responsibility for object
o
k
, we hand over the object ID together with the ac-
tual state as initial state for the processing by the new
cluster head. If the cluster head can maximize its own
utility by keeping o
k
it remains the cluster head for the
next time step as well.
Selecting a proper time for the handover is essen-
tial to limit the communication overhead produced by
the market-based approach itself. As can be seen in
Figures 2(a) to 2(d) a new cluster head is elected after
an auction initiation. We identified three possibilities,
when an auction can be initiated: (i) α
k
h
== 0: The
utility of c
k
h
is equal to zero—the worst case with no
available resources at all or the object is no longer in
the camera’s FOV. (ii) α
k
h
< α
thr
: The utility of c
k
h
is smaller than a given threshold. (iii) We continu-
ously initiate an auction at regular intervals to exam-
ine α
k
h
< α
k
i
, hence, the utility of c
k
h
is smaller than the
utility of a cluster member c
k
i
.
For the cluster-based protocol presented in Sec-
tion 5 and the corresponding evaluation in Section 6
we apply the auction initiation point ii.
4.2 State-space Model
The objective of a VSN is to detect and track objects.
As we assume overlapping FOVs in the VSN we can
perform cooperative state estimation on the object’s
state. In our approach we choose a continuous state,
describing the position and the velocity of the object
moving in the VSN. Equation 5 describes the state s
consisting of position (x, y) and velocity (˙x, ˙y) of an
object o
k
determined by camera c
i
at time step t.
s
k
i
(t) = [x
k
i
(t), y
k
i
(t), ˙x
k
i
(t), ˙y
k
i
(t)] (5)
The state is modeled in a linear state-space model. As
an approach for cooperative state estimation Song et
al. (Song et al., 2011) designed a Kalman Consen-
sus model for fully distributed processing in VSNs.
Their approach serves as reference system in Section
6. Furthermore, we apply the Kalman Consensus Fil-
ter of (Song et al., 2011) in the cluster-based protocol.
5 THE CLUSTER-BASED
PROTOCOL
In our cluster-based protocol (cp. Algorithm 1) the
camera can take on either of the following two roles
for each object in its FOV.
Cluster Head c
k
h
. The cluster head is an elected
camera in the VSN. It has the task of collecting the
observations and the bids from the cluster members.
Further, it performs a state estimation algorithm and
initiates an auction to trigger cluster head election if
necessary.
Cluster Member c
k
i
. First, a cluster member waits
for a defined timeout to receive a request for auc-
tion initiation. After receiving the request, the clus-
ter member provides the cluster head its observation
and bid to a corresponding object. If no request for
auction initiation was received within the timeout, the
camera assigns itself as cluster head. This procedure
is denoted as the initialization phase of the cluster-
based protocol.
Algorithm 1: The cluster-based protocol for a
resource-aware state estimation.
ObjectDetection();
for ∀ o
k
in FOV do
role (k)=role (
˜
k);
GetObservation();
switch (role (k)) do
case (c
k
h
):
InitiateAuction();
ReceiveInformation();
PerformStateEstimation();
if (α
k
i
> α
k
h
) then
Handover (s
k
i
);
role (
˜
k)=c
k
i
;
case (c
k
i
):
WaitTimeout();
if (ReceiveRequest()) then
SendInformation();
else
role (
˜
k)=c
k
h
;
if (ReceiveHandover()) then
role (
˜
k)=c
k
h
;
For each iteration of the cluster-based protocol
in Algorithm 1, the initial task for all cameras in
the VSN is the detection of the objects. As al-
ready mentioned, we assume a global identifier for
each object known by the cameras in the VSN. With
Resource-awareStateEstimationinVisualSensorNetworkswithDynamicClustering
19

ObjectDetection() we can identify all objects o
k
in
the FOV of a camera. The first task for each camera
is to take over the role in role(
˜
k) of the camera from
the previous time step of the specific object o
k
. For
all detected objects o
k
the camera retrieves its local
observations z
k
i
in Observation() and calculate the
corresponding utility α
k
i
.
If the camera is a cluster head c
k
h
it initiates an auc-
tion by InitiateAuction(). Thereafter, it receives
the observations z
k
i
—in our case the object position on
ground plane—as well as the utlity α
k
i
from the clus-
ter members with ReceiveInformation(). In the
next routine it performs state estimation to optimize
the object’s state in PerformStateEstimation() by
integrating the received observations from the cluster
members. Now if one of the received utilities α
k
i
is
smaller than the local utility of the cluster head α
k
h
,
the cluster head performs a handover and transmits
the current estimated state s
k
i
using Handover (s
k
i
) to
the new cluster head c
k
i
. Thereby, it assigns itself as
cluster member.
In case, the camera is a cluster member c
k
i
, it first
waits for a defined timeout in WaitTimeout(). If c
k
i
is able to receive a request from the cluster head in
ReceiveRequest(), it transfers the object’s observa-
tion z
k
i
as well as the corresponding utility α
k
i
to the
cluster head in SendInformation(). On the other
hand, if c
k
i
has not received a request, it assigns itself
as cluster head c
k
h
. Further, if c
k
i
receives the message
ReceiveHandover() it assigns itself to the cluster
head c
k
h
and adopts its tasks in the next time step. With
the self-nomination it is possible to assign multiple
cluster heads for a single object. Nevertheless, in the
next iteration of the algorithm the auction initiation
process elects a cluster head through the exchanged
utilities. Thus, after the first bidding process the issue
on multiple cluster heads is resolved. In this process,
each self-nominated cluster head initiates an auction,
in which the cluster head with the highest utility keeps
its role.
5.1 Additional Settings to the
Cluster-Based Protocol
To keep the dynamic cluster head allocation as
lightweight as possible, cluster members do not know
each other, only the cluster head is in knowledge of
them. Joining a cluster is straightforward. If a cam-
era detects an object, it waits for a predefined timeout
to receive a message for auction initiation by an al-
ready existing cluster head. Since it is able to detect
the object, it has also information about its state and
the related utility. Leaving the cluster is only possi-
ble, if the camera is not able to detect the object in
its FOV. Nevertheless, if this is the case, the camera
shows simply no reaction on messages for auction ini-
tiation. Thus, the cluster head would not receive any
further information related to the object by this cam-
era. Further, a camera failure or a camera adding to
the network would not disturb the process of the clus-
tering protocol.
5.2 State Estimation
In this work we apply the Kalman Consensus Filter
(KCF) proposed by (Song et al., 2011) as state esti-
mator. The major steps are summarized in Algorithm
2. In the information form of the Kalman Filter, pre-
diction and update are done in one step,
s
k
i
(t + 1) =A
i
(t)s
k
i
(t)
+ K
k
i
(t)[z
k
i
(t + 1) − H
i
(t)s
k
i
(t)]
(6)
The observations of the cameras are indicated with
z
k
i
(t + 1) identically described as the state in Equation
5. Further, A
i
is denoted as the state change for each
time step t and H
i
referred to as the observation ma-
trix, which maps the true state space into the observed
space. The Kalman gain K
k
i
defines how much the
difference between the previous estimation and the
actual measurement influences the actual estimation.
Algorithm 2 summarizes the main steps in KCF state
Algorithm 2: PerformStateEstimation().
input : current observations z
k
i
(t + 1) from
all participants (c
k
i
and c
k
h
); state
s
k
i
(t) and covariance matrix P
k
i
(t)
from the last time step t.
output: state s
k
i
(t + 1) and covariance
matrix P
k
i
(t + 1) update.
BuildInformation();
StateEstimation();
StateUpdate();
estimation. As input for the state estimation in
PerformStateEstimation() serves the current ob-
servation z
k
i
(t + 1), the state s
k
i
(t) from the last time
step t and the corresponding covariance matrix P
k
i
(t).
First, the information matrix and the information vec-
tor are built in BuildInformation(). The informa-
tion vector u
i
in Equation 7 is a statistical generaliza-
tion of the observation, whereas the information ma-
trix U
i
in Equation 8 builds the covariance matrix ex-
pressing the uncertainty in the estimated values of the
system state.
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
20

u
k
i
=
∑
i
H
T
i
R
−1
i
z
k
i
(7)
U
k
i
=
∑
i
H
T
i
R
−1
i
H
i
(8)
Within StateEstimation() the state is estimated as
described in Equation 6. The state s
k
i
as well as the er-
ror covariance P
i
are updated in StateUpdate() with
P
k
i
(t + 1) = A
i
(t)M
k
i
(t)A
i
(t)
T
+ B
i
(t)Q
i
(t)B
i
(t)
T
s
k
i
(t + 1) = A
i
(t)s
k
i
(t) (9)
where M
k
i
(t) = (P
k
i
(t)
−1
+U
k
i
)
−1
. Finally we return
P
k
i
and s
k
i
as inputs for the iteration in the next time
step.
6 SIMULATION AND
EXPERIMENTAL RESULTS
We evaluate the proposed resource-aware state esti-
mation with a dynamic clustering approach by sim-
ulation studies. For these evaluations we use a new
VSN-Simulator (Schranz and Rinner, 2014), a graph-
ical simulator built in the game engine Unity3D. The
reason for developing a new simulator beside the ex-
isting ones, as presented in (Qureshi and Terzopoulos,
2008), was to create a tool that i) is easy in installa-
tion, use and extension of the simulation environment,
ii) can model multiple cameras, iii) having a simulator
close to real-time performance (up to now all 2 sec-
onds a measurement is made), and iv) getting a fancy
looking and thus motivating environment with mul-
tiple GUI elements. The VSN-simulator provides 26
smart cameras set to 14 emulated office rooms. Figure
3 shows a screenshot of the simulator, with 3 chosen
camera views and buttons to interact with (add ob-
jects, delete objects, switch tracking of objects on/off
and save the observations). In the simulation environ-
ment the cameras have overlapping FOVs and the ob-
ject identification as well as all other processing task
concerning clustering and state estimation run locally
on the cameras. The corresponding scripts to the pro-
cessing tasks were written in C#. The tracking of the
object is realized by the so-called raycast method pro-
vided by Unity3D. In simple terms, if a camera has a
sustained sight on the object, it gets the object’s coor-
dinates.
Figure 4 shows the scenario for the underlying
simulation results together with the trajectory the ob-
ject is moving on. In our evaluation we consider a sin-
gle room of the VSN-Simulator equipped with 9 cam-
eras. The object is following pre-defined waypoints.
The coordinates on the object’s trajectory are further
Figure 3: A screenshot of the VSN-Simulator.
denoted as ground truth. Within a simulation environ-
ment, the cameras need individual observations from
the object. Thus, each camera’s tracking output is a
random modification of the ground truth. In this eval-
uation we set the modification value randomly to a
standard deviation of 3 length units.
6.1 Performance Measure
A first evaluation is referred to the accuracy of the
object state gained by the proposed resource-aware
dynamic clustering protocol. To compare the cluster-
based protocol with the fully distributed approach of
(Song et al., 2011) both were implemented to the sim-
ulator using C#. For this evaluation we present the re-
sults for t = 1, . . . , 52 measurement points on the ob-
ject’s trajectory of Figure 4. On an average 5 of the
9 cameras have the object in their FOV. Thus, for the
cluster-based protocol, we have 5 participants (con-
sisting of cluster head and cluster members) on aver-
age as well.
Figure 5 illustrates the estimated x and y-
coordinates for a single object, comparing the fully
distributed approach with the cluster-based protocol
to the camera output, a random modification of the
ground truth of the observed object. The difference
of the estimated object’s state between the applied fil-
ters using the cluster-based protocol and the fully dis-
tributed approach is evaluated in Table 1. The state
accuracy computed in a distributed approach achieves
Table 1: Comparison between the fully distributed and the
clustering approach of the RMSE and the standard deviation
σ to the ground truth of the tracked object.
Method
RMSE σ
x y x y
Fully distributed 1.06 0.93 0.64 0.54
Clustering approach 1.71 1.88 1.24 1.08
Resource-awareStateEstimationinVisualSensorNetworkswithDynamicClustering
21
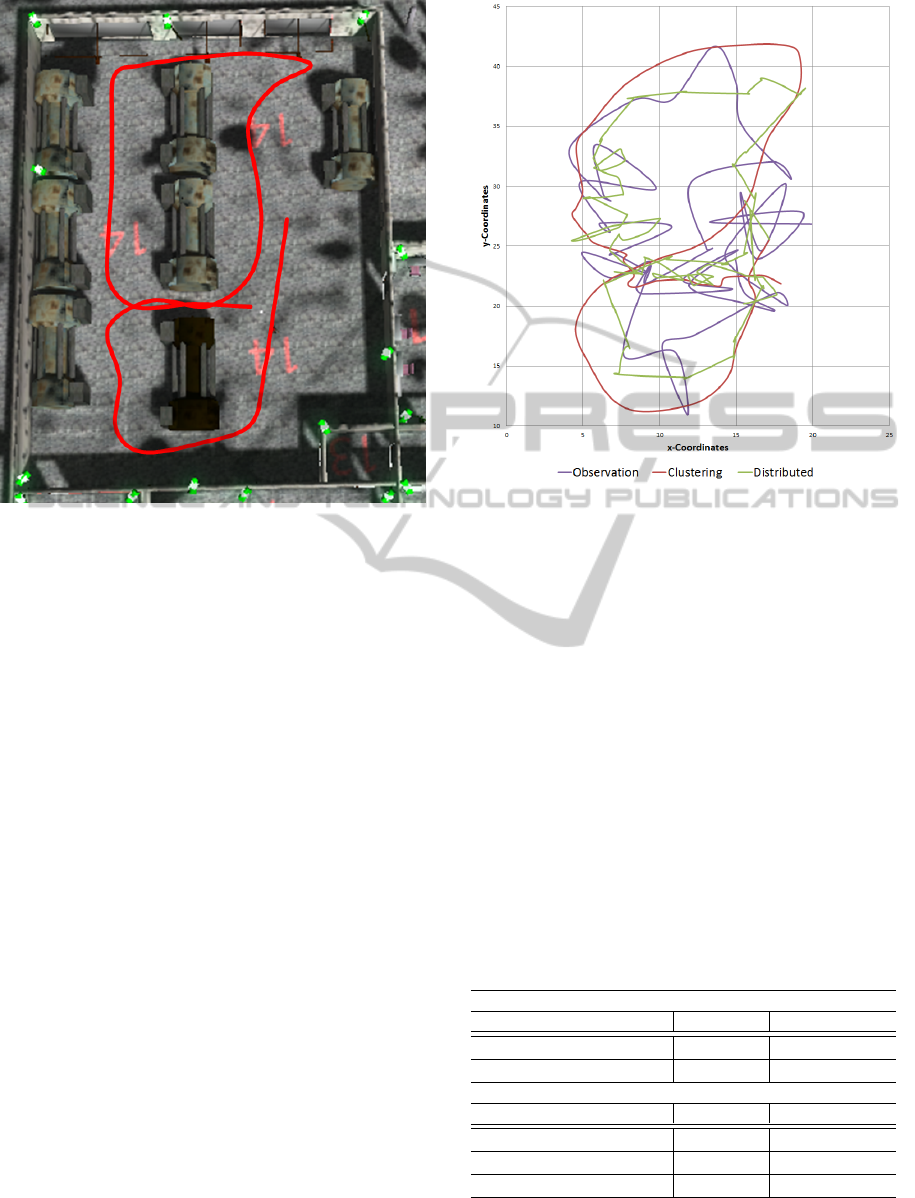
Figure 4: A screenshot of the considered scenario in the
VSN-Simulator including the object’s trajectory.
a higher accuracy of the actual object’s state. Compar-
ing the root-mean-square errors (RMSE) and the stan-
dard deviation σ in x and y, the distributed approach
was able to reduce the error to almost 50%. The rea-
son is that in the distributed approach the cameras
exchange full states and the error covariance matri-
ces instead of single observations as with the cluster-
based protocol.
6.2 Resource Measure
Further evaluations are related to the resource con-
sumption of the VSN within the simulation environ-
ment. Therefore, we record the exchanged messages
as well as the operations for state estimation applied
for the cluster-based protocol and the fully distributed
approach. Both of the following evaluations include
the initialization phase of the cluster-based protocol.
In the simulator we have the following settings for
this evaluation: The communication channel is wire-
less and thus, we exchange the messages by broad-
casting. We record the exchange of the messages
for both approaches in 1 office room of 9 cameras
with overlapping FOVs (see Figure 4). Further, in
this evaluation we consider t = 1, . . . , 52 measurement
points, as for the performance measure in Section 6.1.
As before, we have on average of 5 of the 9 cameras
having the object in their FOV.
Figure 5: Comparing the results of state estimation in the
cluster-based protocol, the fully distributed approach and
the camera observation.
6.2.1 Communication Effort
Table 2 describes the messages for both approaches
with its content. As can be seen, the total payload
of the fully distributed approach exceeds the one of
the cluster-based approach. The message payload
is based on the standard C data types short int (2
Bytes) and float (4 Bytes). Table 3 shows the aver-
age number of messages exchanged for 52 measure-
ment points per camera. If we multiply the retrieved
number of the individual message types with the pay-
load in Bytes from Table 2, we get for the distributed
approach 165.48 Bytes, for the cluster-based protocol
only 14.14 Bytes on average per camera.
Table 2: Message types in the distributed approach and the
cluster-based protocol together with content and total pay-
load size in Bytes.
Fully Distributed approach
Message Type Content Payload (Bytes)
ExchangeInformation() u
k
i
, U
k
i
, s
k
i
80 Bytes
ExchangeFinalState() s
k
i
,P
k
i
72 Bytes
Cluster-based Protocol
Message Type Content Payload (Bytes)
InitiateAuction() c
k
h
2 Bytes
SendInformation() z
k
i
,α
k
i
8 Bytes
Handover() s
k
i
,P
k
i
48 Bytes
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
22

Table 3: Number of messages exchanged in the fully dis-
tributed and the clustering approach for 52 measurement
points on average per camera.
Fully Distributed approach
Message Type Avg. Number per c
i
ExchangeInformation() 1.09
ExchangeFinalState() 1.09
Cluster-based Protocol
Message Type Avg. Number per c
i
InitiateAuction() 0.19
SendInformation() 0.94
Handover() 0.13
6.2.2 Computational Effort
In a further analysis, we focus on comparing the
amount of operations. Therefore, we compare the
number of additions and multiplications between the
two approaches. The result is shown in Table 4 com-
paring the average number of additions and multipli-
cations for 52 measurements per camera. From the
Table 4: Number of operations for state estimation in the
fully distributed approach and the cluster-based protocol for
52 measurement points on average per camera.
Method Additions Multiplications
Fully distributed 399.02 356.77
Cluster-based 82.42 89.45
simulation result of Table 4 we can see that the clus-
tering approach needs a much lower number of oper-
ations on average. For the cluster-based protocol the
number of operations N
o
on average are given with
N
k
o
(t) = t ∗(82.42 + 89.45) (10)
with t as the measurement point index. The first num-
ber indicates the additions, the second the multiplica-
tions for state estimation and the clustering process.
In the distributed approach each camera has the
same number of operations to execute on average
given by
N
k
o
(t) = t ∗(399.02 + 356.77) (11)
again, with t as the measurement point index. The
first number indicates the number of additions, the
second the number of multiplications.
In the cluster-based protocol the state estimation is
calculated only on the cluster head. In contrast, in the
fully distributed approach the operations are executed
on each participating camera. Thus, we can achieve
an enormous reduction of processing and storage con-
sumption in the cluster-based approach when compar-
ing it to the fully distributed approach.
7 CONCLUSION AND FUTURE
WORK
In this paper we propose resource-aware state estima-
tion with a cluster-based protocol for VSNs with lim-
ited capacities in storage, processing and communi-
cation. Our simulation results show that the achieved
accuracy of the state estimation in the cluster-based
protocol declines compared to fully distributed sys-
tems. Nevertheless, the achieved reduction of com-
munication and storage consumption confirm that the
cluster-based protocol is a highly applicable resource-
aware approach for VSNs. Thus, a trade-off be-
tween accuracy and resource-awareness exists for ob-
ject tracking applications in low-power systems. The
next step is to integrate the validated approach into
a VSN of real cameras. As a low-cost development
platform we use the pandaboard
1
extended with a
standard web cam.
An open issue is related to the assumption of ob-
ject identification and the global identifier for the ob-
ject. It is necessary to exchange the observations
among the cameras, thus, each camera is aware to
which object the incoming observations refer. Nev-
ertheless, we are working on relaxing the assump-
tion of object identification. One approach consid-
ers defining a much more complex state, including
also the features of the tracked object. Another ap-
proach could be to define a totally new state, consist-
ing solely of object features and thus, restructure the
current state estimation to an identification problem.
REFERENCES
Bhuvana, V., Schranz, M., Huemer, M., and Rinner, B.
(2013). Distributed object tracking based on cuba-
ture kalman filter. In Signals, Systems and Computers,
2013 Asilomar Conference on, pages 423–427.
Chaurasiya, S. K., Pal, T., and Bit, S. D. (2011). An en-
hanced energy-efficient protocol with static clustering
for wsn. In Proceedings of the International Confer-
ence on Information Networking, pages 58–63.
Chen, C.-H., Yao, Y., Page, D., Abidi, B., Koschan, A.,
and Abidi, M. (2008). Camera handoff with adaptive
resource management for multi-camera multi-target
surveillance. In Fifth IEEE International Conference
on Advanced Video and Signal Based Surveillance,
pages 79–86.
Dieber, B., Micheloni, C., and Rinner, B. (2011). Resource-
aware coverage and task assignment in visual sensor
networks. IEEE Transactions on Circuit and Systems
for Video Technology, 21:1424 – 1437.
1
http://pandaboard.org/
Resource-awareStateEstimationinVisualSensorNetworkswithDynamicClustering
23

Ding, C., Song, B., Morye, A., Farrell, J., and Roy-
Chowdhury, A. (2012). Collaborative sensing in a
distributed ptz camera network. IEEE Transactions
on Image Processing, 21(7):3282–95.
Esterle, L., Lewis, P. R., Yao, X., and Rinner, B. (2014).
Socio-economic vision graph generation and han-
dover in distributed smart camera networks. Trans-
actions on Sensor Networks, 10(2):20:1–20:24.
Hooshmand, M., Soroushmehr, S. M. R., Khadivi, P.,
Samavi, S., and Shirani, S. (2013). Visual sensor net-
work lifetime maximization by prioritized scheduling
of nodes. Journal of Network and Computer Applica-
tions, 36:409–419.
Mallett, J. (2006). The Role of Groups in Smart Cam-
era Networks. PhD thesis, Massachusetts Institute of
Technology.
Medeiros, H., Park, J., and Kak, A. (2008). Distributed
object tracking using a cluster-based kalman filter in
wireless camera networks. IEEE Journal of Selected
Topics in Signal Processing, 2(4):448–463.
Monari, E. and Kroschel, K. (2010). Task-oriented object
tracking in large distributed camera networks. In IEEE
Seventh International Conference on Advanced Video
and Signal Based Surveillance, pages 40–47.
Olfati-Saber, R. and Sandell, N. (2008). Distributed track-
ing in sensor networks with limited sensing range.
In Proceedings of the American Control Conference,
pages 3157–3162. IEEE.
Qureshi, F. and Terzopoulos, D. (2008). Smart camera net-
works in virtual reality. Proceedings of the IEEE,
96(10):1640–1656.
Ren, W. and Beard, R. (2005). Consensus seeking in multi-
agent systems under dynamically changing interaction
topologies. IEEE Transactions on Automatic Control,
50(5):655–661.
SanMiguel, J. and Cavallaro, A. (2014). Cost-aware
coalitions for collaborative tracking in resource-
constrained camera networks. IEEE Sensors Journal,
PP(99):12.
Schranz, M. and Rinner, B. (2014). Demo: VSNsim - a
simulator for control and coordination in visual sensor
networks. In Eight ACM/IEEE International Confer-
ence on Distributed Smart Cameras, page 3.
Song, B., Ding, C., Kamal, A. T., Farrell, J. A., and Roy-
Chowdhury, A. K. (2011). Distributed camera net-
works. IEEE Signal Processing Magazine, 28(3):20–
31.
Soro, S. and Heinzelman, W. (2009). A survey of visual
sensor networks. Advances in Multimedia, 2009:21.
Soto, C. and Roy-Chowdhury, A. (2009). Distributed multi-
target tracking in a self-configuring camera network.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 1486–1493.
Taj, M. and Cavallaro, A. (2011). Distributed and decen-
tralized multi-camera tracking : a survey. IEEE Signal
Processing Magazine, 28(3):46–58.
Torshizi, E. S. and Ghahremanlu, E. S. (2013). Energy
efficient sensor selection in visual sensor networks
based on multi-objective optimization. International
Journal on Computational Sciences and Applications,
3:37–46.
Vickrey, W. (1961). Counterspeculation, auctions, and
competitive sealed tenders. The Journal of Finance,
16(1):8–37.
Younis, O. and Fahmy, S. (2004). Heed: A hybrid, energy-
efficient, distributed clustering approach for ad hoc
sensor networks. IEEE Transactions on Mobile Com-
puting, 3(4):366–379.
Zahmati, A. S., Abolhassani, B., Asghar, A. B. S., and
Bakhtiari, A. S. (2007). An energy-efficient proto-
col with static clustering for wireless sensor networks.
International Journal of Electronics, Circuits and Sys-
tems, 1(2):135–138.
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
24
