
Improving Inertial Navigation Systems with Pedestrian Locomotion
Classifiers
Courtney Ngo
1
, Solomon See
1
and Roberto Legaspi
2
1
College of Computer Studies, De La Salle University-Manila, Manila, Philippines
2
Research Organization of Information and Systems, The Institute of Statistical Mathematics, Tokyo, Japan
Keywords: Machine Learning, Inertial Navigation System, Sensors.
Abstract: Researches on inertial navigation systems (INS) have formulated complex step detection algorithms and
stride length estimations. But for current systems to work, INSs have to correctly identify negative
pedestrian locomotion. Negative pedestrian locomotion are movements that a user can naturally make
without any real position displacement, but has sensor signals that might be misidentified as steps. As the
INS’s modules have a cascading nature, it is important that these false movements are identified beforehand.
This research aims to provide a solution by studying patterns exhibited by positive and negative pedestrian
locomotion when sensors are placed on a user’s front pocket. A model was then built to classify negative
from positive pedestrian locomotion, and to improve the INS’s accuracy overall.
1 INTRODUCTION
Indoor navigation systems determine where a device
has traversed inside a building. These navigation
systems can be employed in applications to help
users find a specific location in closed places like
conference centers and office buildings. Unlike
outdoor navigation systems like the Global
Positioning System (GPS), indoor navigation
systems cannot use satellite signals as heavy
attenuation takes place when the signals make their
way through physical obstacles.
To solve this, researchers have experimented
with Wi-fi signals like (Bahl and Padmanabhan,
2000a), (Bahl and Padmanabhan, 2000b), (Battiti,
2005), (Youssef et al., 2003), and (Youssef and
Agrawala, 2004); vision (Karlsson et al., 2005);
ultra-wide bands (Teuber and Eissfeller, 2006);
cellular-based signals (Otsason et al, 2005);
magnetometers (Chung et al., 2011); and
combinations of these (Brunato and Battiti, 2005).
All of these researches are dependent on
environment variables such as Wi-fi routers and
markers, and some require data collection prior to
system use. This would mean that a significant
change in the environment or the variables would
affect the performance of these navigation systems.
INSs, on the other hand, uses data from inertial
sensors such as gyroscopes and accelerometers to
determine the path a device has travelled. Smart
phones currently already have these sensors as
micro-electrical-mechanical systems (MEMS)
devices, making it possible for INSs to be applied in
smart devices and possible for ubiquitous use.
Compared to other navigational systems, INSs are
independent of its environment, requiring less cost
that otherwise would have incurred with the need of
access points. This also implies less environment
set-up as access points do not need to be installed for
the navigation system to operate. Considering that it
is a cheaper and simpler alternative, INS appears to
be a more attractive approach to building navigation
systems.
2 CHALLENGES
Using INSs in real-world situations, however, is
limited because its MEMS devices are susceptible to
noise and gradual drifts that cause cascading errors.
Because of this, most existing INSs integrate regular
checking with access points with known positions
such as satellites and Wi-fi routers to calculate the
position of the mobile unit to compensate for these
inaccuracies (Martin et al., 2006).
Another problem, which this study intends to
address, is correctly classifying irregular move-
ments. In this research, positive pedestrian
202
Ngo C., See S. and Legaspi R..
Improving Inertial Navigation Systems with Pedestrian Locomotion Classifiers.
DOI: 10.5220/0005242802020208
In Proceedings of the 5th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2015), pages
202-208
ISBN: 978-989-758-084-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
locomotion is defined as movements that include
moving from one physical position to another on
foot. Examples of these are walking, jogging,
running, and climbing up and down the stairs. False
pedestrian locomotion are movements that do not
require moving from a position, such as standing.
There are, however, some false pedestrian
locomotion movements that can simulate movement
from position, and these presents a problem to some
existing INSs. These movements include walking-
in-place, jogging-in-place, and running in place. It is
important future INSs can correctly disregard false
pedestrian locomotion movements to avoid
cascading errors as the modules depend on each
other as displayed in Figure 1. Similarly, it cannot be
expected that users would not exhibit any form of
negative pedestrian locomotion movements in real-
world applications. An INS that considers in these
negative movements will better suit mobile
applications that plan to map user paths in an area.
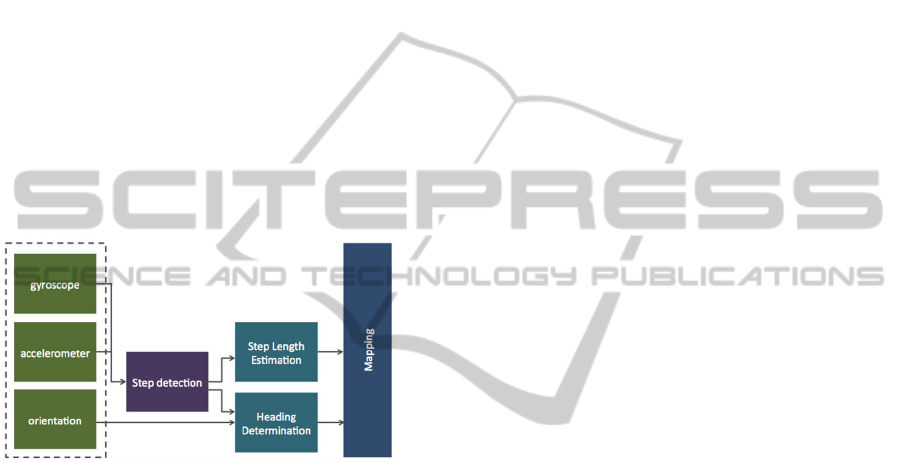
Figure 1: Conventional system flow of inertial navigation
systems.
The main objective of this research is to solve
this problem by creating an additional module in an
INS whose role is to classify whether a user is
making a positive or negative pedestrian locomotion
movement. In the proposed solution, false pedestrian
locomotion movements will be properly detected,
thus false steps would be avoided. This will
consequently affect the estimated path length of the
user and is hypothesized to improve the outputs of
the INS.
3 REVIEW OF RELATED
LITERATURE
3.1 Pedestrian Locomotion Heuristics
There are currently no studies that have a separate
module to classify positive from negative pedestrian
locomotion, but there are some that have integrated
similar measures in their step detection algorithms.
In some studies like (Lee and Mase, 2001) and (Li et
al., 2012), additional heuristics were implemented to
prevent allowing false positive steps. These
heuristics are hard-coded based on each study's
preliminary data. As it is, more heuristics will need
to be added to allow more movements.
Although the following research did not take into
consideration a wider range of movements compared
to this study, their heuristics were able to prevent
certain negative pedestrian locomotion movements
as positive.
3.1.1 Lag Parameter
In a study conducted by (Lee and Mase, 2001), a lag
parameter was added in their step detection
algorithm. With the lag, the system can supposedly
check if the step taken is not a step but another body
movement. It involves getting the z-axis of the
accelerometer that is indicative of upward
movements of the leg. The lag parameter is as
follows:
lag=min
…
z
n
z
nj
(1)
where lag is the lag parameter, N is the window size,
and z(n) is the z-axis value of the accelerometer at
time j, which usually changes as the subject raises
his leg.
The lag must be greater than a threshold to pass
the heuristic. As can be seen in the equation, the
study assumed that other body movements would
have less activity in the accelerometer's z-axis, and
that walking would induce peaks in the z-axis.
However, walking-in-place would also express a
high activity in the z-axis even though it is truly a
false pedestrian locomotion movement.
3.1.2 Dynamic Time Warping
In (Li et al., 2012)’s study further used dynamic time
warping (DTW) as an added filter to detect false
steps. Aside from (1) checking if peaks and valleys
pass a certain threshold, (2) peaks and valleys must
also not be too short, or (3) too long (maximum of 1
second). Acceleration's peak and valley's magnitudes
are also considered, where (4) the magnitude must
be within a minimum of 0.2g, and a maximum of
2.0g.
With DTW, two more heuristics were formed. A
fifth heuristic uses DTW to calculate the similarity
of steps taken with the right leg, and similarity of
steps taken with the left leg. In this condition, the
ImprovingInertialNavigationSystemswithPedestrianLocomotionClassifiers
203

similarity of the last step taken with the left/right
foot and the current step taken with the left/right foot
must be greater than a threshold. If the result is
negative, a sixth heuristic compares the current left
step with the next left step. If these two signal's
similarity passes the threshold, the current left step
would be considered a step. With this method, their
step detection algorithm can tell the difference
between a step taken while walking and a step taken
while walking-in-place given that the two steps are
taken after the other and the false step is just a
momentary gap from a series of true pedestrian
locomotion movements. However, their system can
still possibly fail if the user continues to perform a
false pedestrian locomotion movement.
After adding the DTW heuristic, the research
recorded a drop in false positives (incorrectly
processed false steps) from 29 to 14.
In the study, false negatives are more important
than false positives. False positives can be further
checked with the step detection algorithm. Even if a
false step was considered a step in the pedestrian
locomotion model, there is still the possibility that
the false step would be detected as false by the step
detection algorithm. The false negatives increased
from 0.4 to 0.5. But as stated in the study, the
benefits outweighed the disadvantages.
4 PROPOSED SOLUTION
This research proposes to create a separate module
in the standard INS framework that will focus on
classifying a movement as either false or true
pedestrian locomotion movement. As shown in Fig.
2, the new module would operate first before the
step detection module. If the module identifies a
window of movement as false pedestrian
locomotion, the succeeding modules would not
process that window. If it does detect the window as
true, the succeeding modules would operate
normally. This would imply that the INS could
Figure 2: Proposed system of the research.
perform more efficiently should the new module
classify well. On the other hand, a cascading error
can transpire instead.
4.1 Inertial Navigation System
A simple INS would be created to compare the
performance of a conventional INS against an INS
with the pedestrian locomotion detection module.
The modules are discussed below along with the
algorithms and heuristics used in each.
4.1.1 Step Detection Module
The step detection module would detect steps from
accelerometer signals once the pedestrian
locomotion model determines that the user is
performing a positive pedestrian locomotion
movement.
The accelerometer signals would be scoured for
a value greater than threshold α. In order to discard
false peaks, a second threshold βis introduced.
Threshold βis the minimum time gap between two
steps. Before a step is identified, the time gap
between the said step and the previous step must be
greater than threshold β.
Both thresholds were determined after collecting
user data.
4.1.2 Stride Length Estimation Module
The stride length estimation module would start
calculating for the step length once the Step
Detection Module has determined the user made a
step. A linear model would be created as previous
studies such as (Li et al., 2012) have shown before
that a linear relationship exists between stride length
and step frequency. This module would update the
step frequency along with the Step Detection
Module. A linear model would be generated after
collecting data.
4.1.3 Heading Determination Module
This module would work side-by-side with the
Stride Length Estimation Module after the Step
Detection Module determines a step has been taken.
It is responsible of approximating the direction the
user is heading. In this research, the orientation y-
axis data would be used to determine the heading.
The values can range between 0° and 359°.
4.1.4 Mapping Module
The mapping module outputs a series of points
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
204

indicating a user's traversal across a space. It would
receive inputs from the stride length estimator
module and heading determination module, and
would have knowledge of the coordinates of the
previous point. The coordinates of the initial point
would be set to (0,0).
The new point would be calculated as:
x
=l∗cos
α
+x
(2)
y
=l∗sin
α
+
y
(3)
where
is the x-coordinate of the current point,
is the y-coordinate of the current point,
is
the x-coordinate of the previous point, and
is
the y-coordinate of the previous point, l is the stride
length, and is the heading.
4.2 Pedestrian Locomotion Model
As the main component of the pedestrian locomotion
module, the pedestrian locomotion model is a
classifier that identifies movements as either positive
or negative pedestrian locomotion movements. A
discussion of how the model was created is written
below.
4.2.1 Data Collection
In this research, 30 subjects will participate by
performing 12 movements for data collection. Each
subject should be at the age range of 19 to 49 years
old, as a stable gait has been found across that age
range (Thanh et al., 2012). On a similar note, the
subjects should also be able-bodied. Every subject
will perform each of the 12 movements for 5
minutes each. The 12 movements are composed of 3
positive pedestrian locomotion movements: (a)
walking, (b) climbing down stairs, and (c) climbing
up stairs; and 9 negative pedestrian locomotion
movements: (d) turning, (e) standing, (f) swinging
one's legs, (g) sitting, (h) twisting, (i) walking in
place, (j) leaning on the heels and balls of one's feet,
(k) doing random movements in place, and (l)
bending. The random activity can be used to test the
robustness of the model in terms of classifying
unlisted movements in future research.
A Samsung Galaxy S2 phone was used to collect
data. For this purpose, a mobile application was
developed to collect sensor readings from the tri-
axial gyroscope and tri-axial accelerometer at a rate
of 100Hz. The phone was placed in the subjects's
right-side pockets at the front. Placing the phone in
the mid-section of the subject is strategic as it is the
person's center of gravity, making it sensitive to
movements made with the limbs. The position is
also a typical location phones are placed in. The
phone is limited to a specific orientation that faces
the phone screen towards the thigh of the subject,
and the top of the phone is pointed down.
4.2.2 Feature Modelling
The data entries would be grouped into windows of
size 100. This window size is equivalent to a second
worth of records, and will have an overlap of 50%.
Three features were extracted from each of the
sensors's axes: mean, standard deviation, and energy.
These features were extracted without removing the
gravity factor from the readings, or applying any
filter.
4.2.3 Model Generation
A C4.5 model and a support vector machines (SVM)
model would be generated using WEKA's J48 and
sequential minimal optimization (SMO) algorithms.
The model would be used in the pedestrian
locomotion detection module, and would determine
if the person is performing a positive or negative
pedestrian locomotion movement.
5 RESULTS AND DISCUSSION
5.1 Tests
Two kinds of test were conducted to evaluate the
INS with and without the prediction module: the
square route test, and the multi-activity square route
test. The tests were carried out by six subjects,
wherein they were limited to follow a marked route,
to execute movements as instructed to them, and to
only bring the phone out at the beginning and end of
each test. The subjects were allowed to walk on their
own natural regular pace.
Square Route Test: The square route test is a
20m walk that is composed of four five-meter
sections that are orthogonal after one another. The
route is purely positive pedestrian locomotion, and is
intended to test the prediction model's performance
in a situation where an INS without a prediction
module will perform perfectly. Another factor to
analyse is the model's ability to classify "walking
while turning" from "turning in place".
Multi-Activity Square Route Test: The multi-
activity square route test is similar to the square
route test but introduces negative pedestrian
locomotion in every corner. The routine, which is
presented in Figure 3 begins with 1) a five meter
ImprovingInertialNavigationSystemswithPedestrianLocomotionClassifiers
205
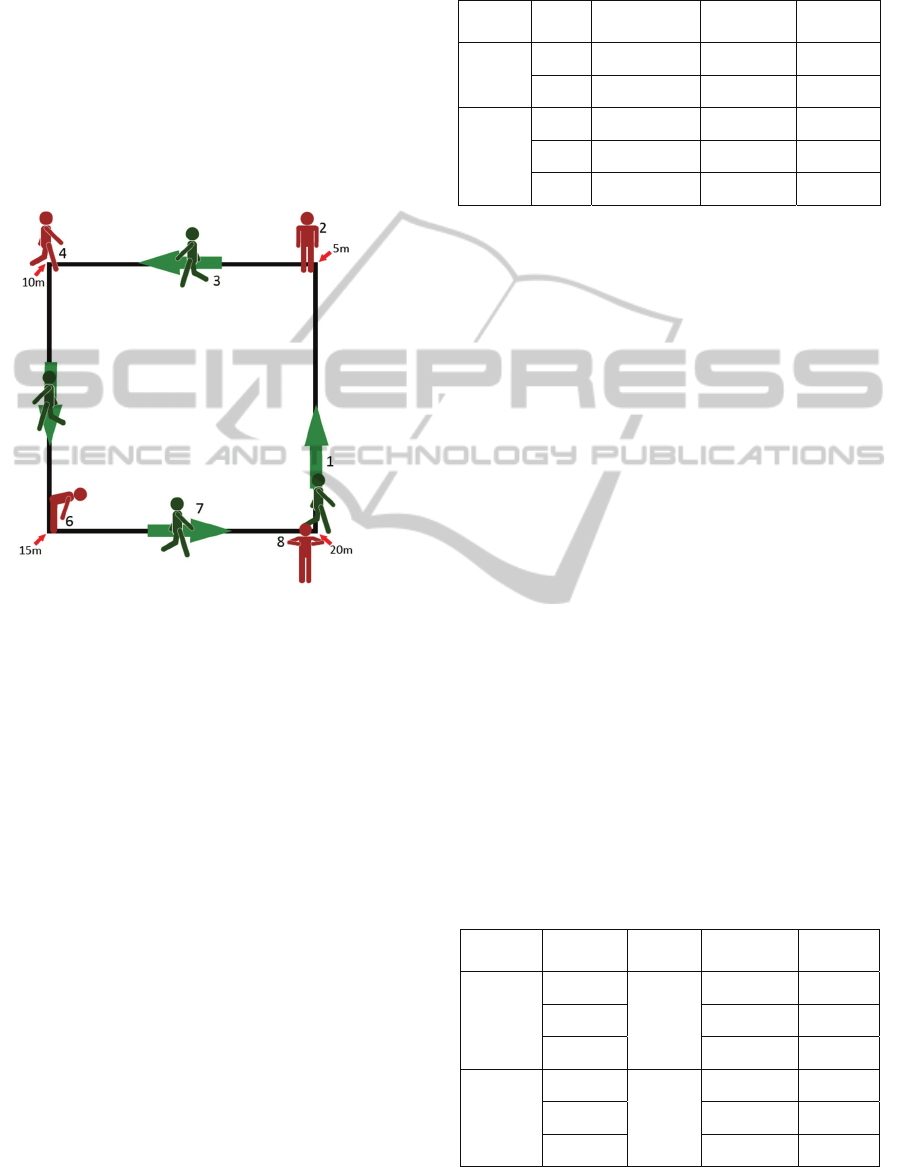
walk, 2) five seconds of standing, 3) five meter walk
after a perpendicular turn, 4) five seconds of
walking-in-place, 5) five meter walk after a
perpendicular turn, 6) five seconds of bending, 7)
five meter walk after a perpendicular turn, and 8)
five second of twisting. Since walking five meters
usually takes 3.5 to 5 seconds, this test is the more
balanced in terms of number of the positive and
negative pedestrian locomotion movements. This
makes this test a good way to evaluate the INS with
a prediction module.
Figure 3: The multi-activity square route test is composed
of negative and positive pedestrian locomotion.
5.2 Prediction Module
For the square route test, the recall of positive and
accuracy are the same because it is a purely positive
activity. The INS without a prediction module also
has a 100% recall and accuracy for the same reason.
As can be seen in Table 1, the J48 and SMO
models performed well. A closer look at the J48
results reveals that three subjects had data that were
all correctly classified, while the other three had one
misclassification each. The SMO model correctly
classified all instances as positive except for one
misprediction.
The multi-activity square route shows a lower
accuracy and recall for both models. It is, however,
important to note that both models have an
acceptable recall on positive. In this research, the
recall on positive locomotion is more important.
Accidentally predicting a negative locomotion as
positive does not automatically mean that steps will
be detected; the possibility of the step detection
module to not detect steps is still open.
Table 1: Prediction module results for INSs with and
without a prediction module.
Recall on
Positive
Recall on
Negative
Accuracy
Square
Route
J48 97.03% 97.03%
SMO 99.01% 99.01%
Multi-
Activity
Square
Route
w/out 100.00% 0.00% 48.51%
J48 87.72% 67.77% 77.45%
SMO 90.35% 71.07% 80.43%
5.3 Step Detection Module
It is expected that the step count error in the step
detection module will decrease if the INS will use a
prediction module. Table 2 shows the step count
error produced by the INS with and without a
prediction module.
The square route test reveals that the INS without
a prediction module performs better, only
mispredicting seven steps. The INSs with the
prediction modules had a higher error, with the J48
model missing 12 steps and the SMO eight steps.
This suggests that the additional module allowed
more false negatives than an INS without a
prediction module.
But the multi-activity square route test presents a
different outcome where the INSs with the
prediction module now performs more accurately in
terms of step count error. Both prediction models
elicited a significantly lower step count error. This
indicates in exchange of versatility when it comes to
negative locomotion, some false negatives were
allowed to be made. But given the difference in
errors, the benefits of having a prediction module
outweigh the disadvantages. INSs with the module
are more adaptable in terms of allowing the subject
to perform negative pedestrian locomotion.
Table 2: Step detection module results for INSs with and
without a prediction module.
Actual #
of Steps
Estimated #
of Steps
Error
Square
Route
without
188
181 3.72%
J48 176 6.38%
SMO 180 4.26%
Multi-
Activity
Square
Route
without
193
296 34.80%
J48 233 17.17%
SMO 233 17.17%
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
206
5.4 Stride Length Estimation Module
As with the step detection module, the error in total
distance travelled will also be assessed for the stride
length estimate module. The length errors of the
INSs with and without a prediction module are
presented in Table 3.
Similar to the results of the step detection
module, the error result is based on the kind of test
the INS undergoes. This is because the stride length
estimation module's result is also based on the
preceding step detection module; that is the total
distance travelled is directly proportional to the step
count. Given this, the INS without the prediction
module performed better in the square route test,
while the INS without it had a better accuracy in the
multi-activity square route test. Though there is a
clear advantage when the basic INS is used in a
purely positive activity, using a classification model
introduces versatility to the system.
Table 3: Stride length estimation module results for INSs
with and without a prediction module.
Actual
Length (m)
Estimated
length (m)
Error
Square
Route
without
120
117.98 1.69%
J48 114.70 4.41%
SMO 117.29 2.26%
Multi-
Activity
Square
Route
without
120
193.67 61.39%
J48 151.97 26.64%
SMO 161.65 34.71%
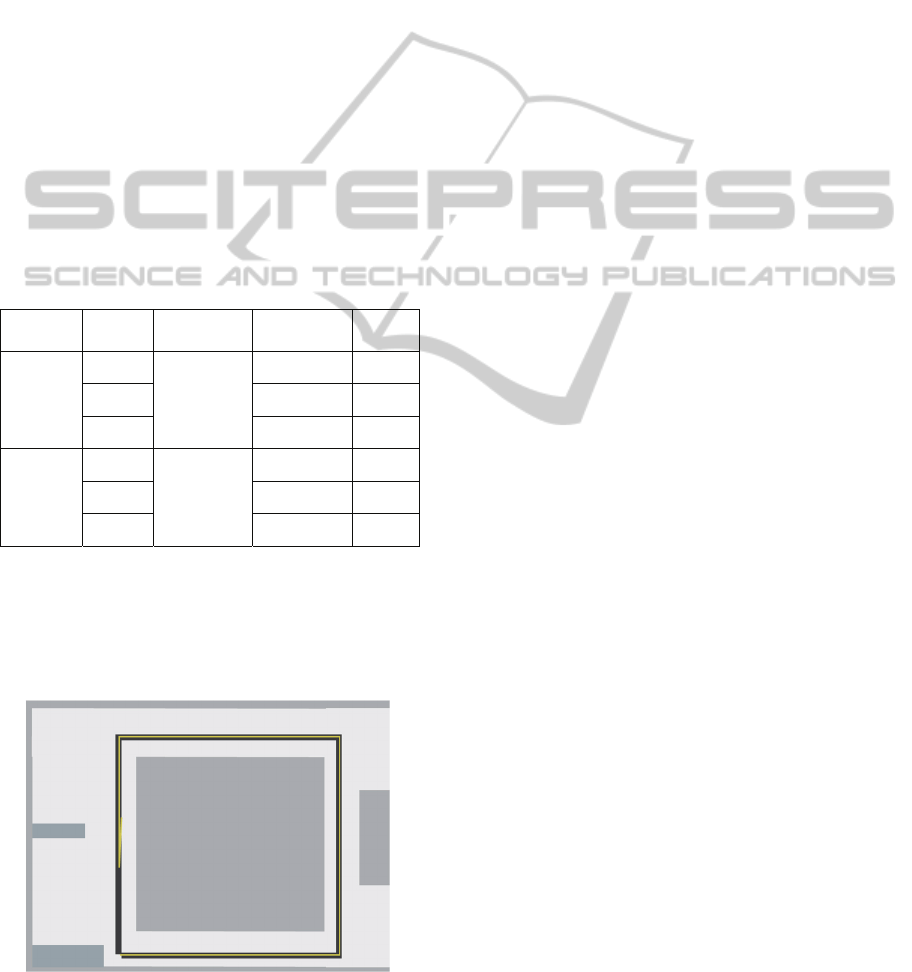
5.5 Mapping Module
The final output of the INS is the route the user has
traversed. For both tests, the INS with the prediction
module fared well. Both J48 and SMO prediction
Figure 4: Map generated using J48 and SMO as pedestrian
locomotion classification models.
modules came up with close results, one of which is
shown in Figure 4. In the figure, the route in black is
the actual route and the route in yellow is the
estimated route of the INS. Although the distance
travelled was accurately measured, the orientation
was not determined properly, thus resulting to an
incorrect map.
It is also important to note that the INS used in
this research worked well with the given route
because it is limited to perpendicular orientations.
The heading determination module used in this
research is especially basic and still needs
improvement.
6 CONCLUSIONS
This research was able to present that a J48 and
SMO pedestrian locomotion classifier can increase
the over-all performance of an INS. The step
detection and stride length estimation module also
benefited from the prediction model especially with
experiments that have negative pedestrian
locomotion activities.
In conclusion, the results have shown that adding
a pedestrian locomotion module allows an INS to be
more versatile. An INS with a prediction module can
handle negative pedestrian locomotion activity,
while a normal INS will require users to walk
continuously and maintain a low sensor activity to
prohibit a negative pedestrian locomotion activity to
be falsely considered a step. And as negative
pedestrian locomotion activities are inevitable in real
scenarios, a prediction module presents an adequate
solution to this INS problem.
Further research can delve into further testing the
system for its capabilities and weaknesses.
Additional work still needs to be done to improve
the heading determination module of the system,
which is currently limiting the system to specific
routes. Future studies can also focus on employing
additional sensors to improve and compensate for
the MEMs inherent noise.
ACKNOWLEDGEMENTS
This research is made possible with funding from
the Philippine government. The researchers would
like to thank the Department of Science and
Technology's Engineering Research and
Development for Technology (DOST-ERDT)
program for its incalculable support for this study.
ImprovingInertialNavigationSystemswithPedestrianLocomotionClassifiers
207

REFERENCES
Bahl, P. and Padmanabhan, V. N. (2000a). Enhancements
to the radar user location and tracking system.
Bahl, P. and Padmanabhan, V. N. (2000b). Radar: An in-
building rf-based user location and tracking system. In
INFOCOM, pages 775–784.
Battiti, R., Nhat, T. L., and Villani, A. (2002). Location-
aware computing: A neural network model for deter-
mining location in wireless lans. Technical report.
Brunato, M. and Battiti, R. (2005). Statistical learning the-
ory for location fingerprinting in wireless lans. Com-
puter Networks, 47(6):825–845.
Chung, J., Donahoe, M., Schmandt, C., Kim, I.-J.,
Razavai, P., and Wiseman, M. (2011). Indoor location
sens- ing using geo-magnetism. In Agrawala, A. K.,
Cor- ner, M. D., and Wetherall, D., editors, MobiSys,
pages 141–154. ACM.
Karlsson, N., Bernardo, E. D., Ostrowski, J., Goncalves,
L., Pirjanian, P., and Munich, M. E. (2005). The vS-
LAM algorithm for robust localization and mapping.
In 2005 IEEE International Conf. on Robotics and Au-
tomation, ICRA 2005.
Lee, S.-W. and Mase, K. (2001). Recognition of walking
behaviors for pedestrian navigation. In Proceedings of
the 2001 IEEE International Conference on Control
Applications, UbiComp ’12, pages 1152–1155.
Li, F., Zhao, C., Ding, G., Gong, J., Liu, C., and Zhao, F.
(2012). A reliable and accurate indoor localization
method using phone inertial sensors. In Proceedings of
the 2012 ACM Conference on Ubiquitous Comput-
ing, UbiComp ’12, pages 421–430, New York, NY,
USA. ACM.
Martin, J. D., Krosche, J., and Boll, S. (2006). Dynamic
gps- position correction for mobile pedestrian
navigation and orientation. In Proceedings of the 3rd
Workshop on Positioning, Navigation and
Communication.
Moore, R. and Lopes, J. (1999). Paper templates. In TEM-
PLATE’06, 1st International Conference on Template
Production. SCITEPRESS.
Otsason, V., Varshavsky, A., LaMarca, A., and de Lara, E.
(2005?). Accurate gsm indoor localization.
Smith, J. (1998). The Book. The publishing company,
Lon- don, 2nd edition.
Teuber, A. and Eissfeller, B. (2006). A two-stage fuzzy
logic approach for wireless lan indoor positioning. In
IEEE/ION Position Location Navigat. Symp, vol- ume
4, pages 730–738.
Thanh, T. N., Makihara, Y., Nagahara, H., Mukaigawa,
Y., and Yagi, Y. (2012). Performance evaluation of
gait recognition using the largest inertial sensor-based
gait database. In ICB, pages 360–366.
Youssef, M., Agrawala, A., and Shankar, A. U. (2003).
WLAN location determination via clustering and
probability distributions. In Pervasive Computing and
Communications (PerCom).Proceedings of the First
IEEE International Conference, pages 143–150.
Youssef, M. and Agrawala, A. K. (2004). Handling
samples correlation in the horus system. In
INFOCOM.
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
208
