
An Efficient Simulator for Fault Detection and Recovery in Smart Grids
FDIRSY
Syrine Ben Meskina
1
, Narjes Doggaz
2
and Mohamed Khalgui
3
1
LISI, ISI, University Tunis-El Manar, Tunis, Tunisia
2
LIPAH, FST, University Tunis-El Manar, Tunis, Tunisia
3
LISI, INSAT, University of Carthage, Tunis, Tunisia
Keywords:
Smart Grid, Fault Categorization, Dominant Faults, Equivalent Faults, Local Resolution, Non-local Resolu-
tion, Multi-agent System.
Abstract:
This research paper deals with failures and faults in power smart grids. We propose an original multi-agent
approach for power system recovery based on fault classification. For that, we propose the classification
of faults as dominant or equivalent ones. This classification has the advantage of optimizing the task of
power system recovery. To test and validate our approach, we develop a simulator, named FDIRSY (Fault
Detection, Isolation and Recovery SYstem). The experimental study showed that our approach ensures the
search for the best solution from the existing ones thanks to the use of mobile agents. These agents have
the advantage of evaluating all the existing alternatives while reducing the communication cost (in terms of
exchanged messages). We demonstrate that our approach is gainful in terms of required times, actions to be
performed as well as the faults to be resolved thanks to the proposed fault classification.
1 INTRODUCTION
The new generation of power networks, ”smart grid”,
makes power networks intelligent through the main
following characteristics; multi-service communica-
tion, reliability, security and safety allowing a real-
time supervision. It should integrate the actions of
all types of users and consumers increasing the im-
portance of low voltage network automation. (Fang
et al., 2012) discusses the several actors and factors
contributing on the evolution of power grids in their
survey. Many types of problems may occur on power
grids engendering other faults by propagation. There
are many related works dealing with power recovery
systems. But the existing methods do not handle the
consequent failures and do not investigate the relation
between them. Each one of the detected failures is
handled separately.
In this paper, we are interested in developing an
original software system detecting the faults in power
networks, identifying, localizing and investigating the
occurred faults as well as the consequent ones. This
new simulator is based on the multi-agent approach
for power system recovery proposed in (Ben Meskina
et al., 2014). The decentralization of the control (one
controller agent per sub-grid) restricts the number of
the deployed agents in order to avoid the expensive
inter-agent communication. The use of mobile agents
in power grid present a novelty and allows an acceler-
ated investigation of all the connected neighbor sub-
grids to provide efficient recovery. The number of
faults to be resolved is reduced thanks to the proposed
fault categorization. The use of extensible data bases
updated at run-time is advantageous in order to re-use
solutions yet found. In this paper, Section 2 summa-
rizes the most important works related to smart grid
recovery in the literature. In Section 3, we expose the
problems which are not considered in the literature
and present the characteristics and architecture of the
developed simulator FDIRSY. Then, in Section 4 we
detail its functioning and give the principal algorithms
of the several agents deployed in the multi agent sys-
tem(MAS). The last section illustrates the gain, using
our simulator, in terms of required time and commu-
nication.
2 STATE OF THE ART
There is a big amount of research works, in the lit-
erature, relative to several topics about smart power
grids. An important number of them work on failure
132
Ben Meskina S., Doggaz N. and Khalgui M..
An Efficient Simulator for Fault Detection and Recovery in Smart Grids - FDIRSY.
DOI: 10.5220/0005245001320139
In Proceedings of the 5th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2015), pages
132-139
ISBN: 978-989-758-084-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

detection and localization, self-healing and system re-
covery... These related studies investigate these prob-
lems and propose several approaches based on differ-
ent concepts such as; Multi-Agent Systems (MAS),
Petri-Nets, smart micro-grids using Distributed En-
ergy Resources (DER), electric devices like Smart
Storage Devices (SSD)... (Chertkov et al., 2011) de-
velops an approach to efficiently identify the most
probable failure modes in static load distribution for
a given power network. (Calderaro et al., 2011) pro-
poses a method using Petri Nets in order to detect and
identify failures in transmission power grids. (Rus-
sell and Benner, 2010) presents some examples of the
types of incipient failures that can be detected from
substation electrical waveforms. (Oudalova and Fidi-
gattib, 2009) uses the concept of micro-grids using re-
newable energy, SSD and load controllers in order to
reduce the transmission loads and to resolve failures.
(McArthur et al., 2007a) and (McArthur et al., 2007b)
investigate and study the higher value-added by MAS
to power industry (using open MAS architectures and
distributed system platforms). (Jiang et al., 2014b)
propose a hierarchical MAS for the self-healing based
on IEC 61499/61850. (Jiang et al., 2014a) propose
an hierarchical multi-agent architecture for automatic
restoration in power grids. They associate an intelli-
gent agent to each electrical station in order to con-
trol its functioning. (Massoud and Wollenberg, 2005)
presents a modern infrastructure for power grids im-
proving their efficiency, reliability, and safety and
making them intelligent by, simply, integrating a soft-
ware module in some electric components. The goal
is to decentralize the control without waiting the re-
sponse of the central protection system in the case of
power network failures.
After these short observations on the literature, we
count a multitude of research works working on fail-
ure detection and power system recovery. In fact, the
majority of them handle only one type of faults. We
remark, also, that the related works do not investigate
the relation between the detected fault and the con-
sequent ones to resolve both of them. It is important
to establish a relation between the detected faults and
the engendered ones in order to define an optimizing
strategy solving the maximum of the occurred faults
or, even, all of them. In the other hand, we note that
the majority of the proposed approaches, in the liter-
ature, are based on MAS deploying a big number of
agents ((Ramchurn et al., 2011) assigns one agent to
each consumer). In fact, this makes the process of
inter-agent communication very expensive in terms
of required time and, thus, the procedure of search
for solutions performs too slowly. (Rahman et al.,
2007) proposes an efficient approach for power sys-
tems self-healing based on specialized micro-grids.
They use 7 agent types making the communication
process costly. Another disadvantage of the proposed
MAS in the literature lies in the centralized control.
(Vyatkin et al., 2010) deploys only a unique one mas-
ter agent Facilitator Agent (FAG) and multiple Bus
Agents (BAGs) leading to a centralized control power
system and to a big number of BAGs. The investi-
gation of the history of the encountered and solved
problems in power grids is important to avoid the res-
olution of problems solved beforehand. (Pipattana-
somporn et al., 2009) used an inextensible fact bases.
3 SMART GRID SIMULATOR
In this section, we begin at first by exposing the rea-
sons motivating the development of FDIRSY. Second,
we detail our multi-agent approach for fault detection
and recovery. Finally, we present, FDIRSY, our de-
veloped simulator.
3.1 Problems and Motivations
The robustness of electrical grids lies on their abil-
ity of managing and facing all eventual submerging
problems. We model a problem in a power network
by a fault or a fault set. In fact, a fault occurs be-
cause of violating one or more constraints knowing
that such fault may engender other consequent ones.
We proposed, in (Ben Meskina et al., 2014), a set of
operating conditions that must be respected in smart
power grids. In order to optimize the required time
for power system recovery, we look for optimizing
the cost of the resolution procedure while trying to
solve the maximum of the occurred faults. For that,
we proposed new definitions for dominant and equiv-
alent faults in (Ben Meskina et al., 2014). Dominant
faults correspond to faults engendering other ones in
the connected components (belonging to the voltage
level below or the same one with smaller rank). The
rank presents the order of a component apparition in
a power line. Equivalent faults correspond to faults
occurring on connected components belonging to the
same voltage level and having the same rank. These
new relations facilitate the failure recovery and al-
low the control and the reduction of the fault recovery
time.
In order to illustrate our fault categorization, we
consider, in Figure 1, a power sub-grid. Let us assume
that the emergency Medium Voltage Line eMV L1 is
activated and that the Medium Voltage Line MV L1 is
deactivated. Let us suppose, in addition, that there
is an instability voltage problem observed on MV L2.
AnEfficientSimulatorforFaultDetectionandRecoveryinSmartGrids-FDIRSY
133
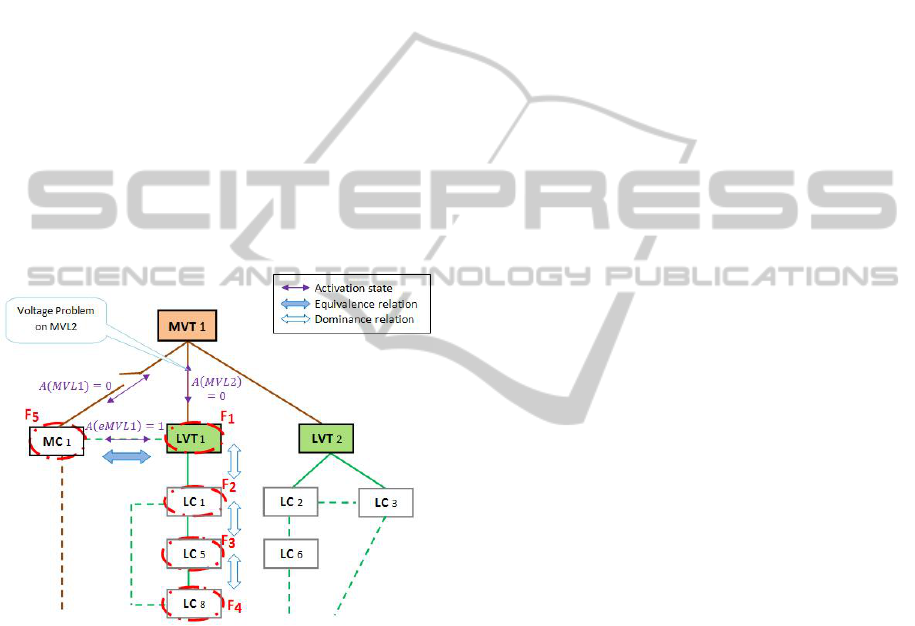
We denote by F
1
the resulting fault occurred on the
Low Voltage Transformer LV T 1 which is propagated
to the connected devices. We denote, respectively, by
F
2
, F
3
, F
4
and F
5
the faults, consequently, occurred
on the Low Consumers LC1, LC5, LC8, and on the
Medium Consumer MC1. Based on the new pro-
posed definitions, we categorize F
2
, F
3
and F
4
as faults
dominated by F
1
and both of F
1
and F
5
as equivalent
ones. The resolution of the dominant fault resolves all
the problem (including the dominated ones). When a
dominant fault can not be resolved, we proceed to the
resolution of the dominated faults after categorizing
them. On the other hand, the resolution of only one of
the equivalent faults can resolve all the problem. The
advantage is, particularly, observed in the case of mul-
tiple occurring faults, as we are focussed on resolving
only one or, at most, a subset of them. Thus, in this
example, the resolution of either F1 or F5 solves all
the problem. This strategy facilitates, accelerates and
guides pertinently the procedure of search for solu-
tion.
Figure 1: Fault F
1
engendering other faults (F
2
, F
3
, F
4
and
F
5
) on the connected components
3.2 The Proposed Architecture
To achieve the development of our system, we use the
multi-agent paradigm based on distributed architec-
ture decentralizing the control hence the decomposi-
tion of the overall electric network into sub-nets. This
architecture is, essentially, composed of three types
of software agents which are Reconfiguration Agent,
Mobile Agent and Data Base Agent. These agents
interact and collaborate together in order to maintain
the stability and the effective functioning of the power
grid. Our system detects and classifies the occurred
faults to facilitate the system recovery and looks for
finding the best solution as we use a solution updated
at run-time contrary to the related works. The UML
activities diagram, illustrated by Figure 2, describes
the behavior of our simulator. This schema indicates
the used software entities composing our system and
summarizes the main considered functionalities.
• Reconfiguration Agent (RAgent)
A Reconfiguration Agent is responsible of the detec-
tion and the recovery of the faults occurred in the sub-
grid under its scope. We propose to associate only
one RAgent to each power smart sub-grid. When
it detects an anomaly due to a violated constraint,
it isolates first the component or line responsible of
the anomaly. Then, it searches locally for a solution.
When no local solution is found, it requests the Data
Base Agent about a solution already found for the en-
countered problem. If no stored solution, the Recon-
figuration Agent searches for a cooperative solution
from the neighbor sub-grids. For that, it creates a Mo-
bile Agent(s) to obtain information about the compo-
nents belonging to the connected sub-grids.
• Mobile Agent (MAgent)
A Mobile Agent is a software entity moving dynam-
ically, through electric lines, to visit the components
belonging to the neighbor smart sub-grids. It is cre-
ated and destructed by an RAgent. Its task consists
on collecting and communicating useful information
for a given search for fault recovery. When the vis-
ited component has more than one outgoing line (con-
nected to more than one components), the MAgent
is duplicated in order to analyze all the existing al-
ternatives or paths. The duplicated agents are called
clones and takes only one line (path) at a time. All
the clones operate simultaneously in order to decrease
the required time. Each component should be visited
at most once by the same Mobile Agent to ensure that
the resolution terminates.
• Data Base Agent (DBAgent)
The DBAgent is responsible of the management and
the storage of all the information relative to the whole
power grid structure. It contains, also, the history of
all the occurred faults and all information relative to
the problems (like problem type, failed components,
CPU...) as well as the corresponding solutions found
by MAgents. It may be requested by both Recon-
figuration and Mobile Agents about information rel-
ative to the power system. It should update its knowl-
edge for each new solution found by Mobile Agents.
To avoid searching solutions for problems already re-
solved, the Reconfiguration Agent may request the
Data Base Agent when it encounters a problem for
which it did not found a local solution.
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
134
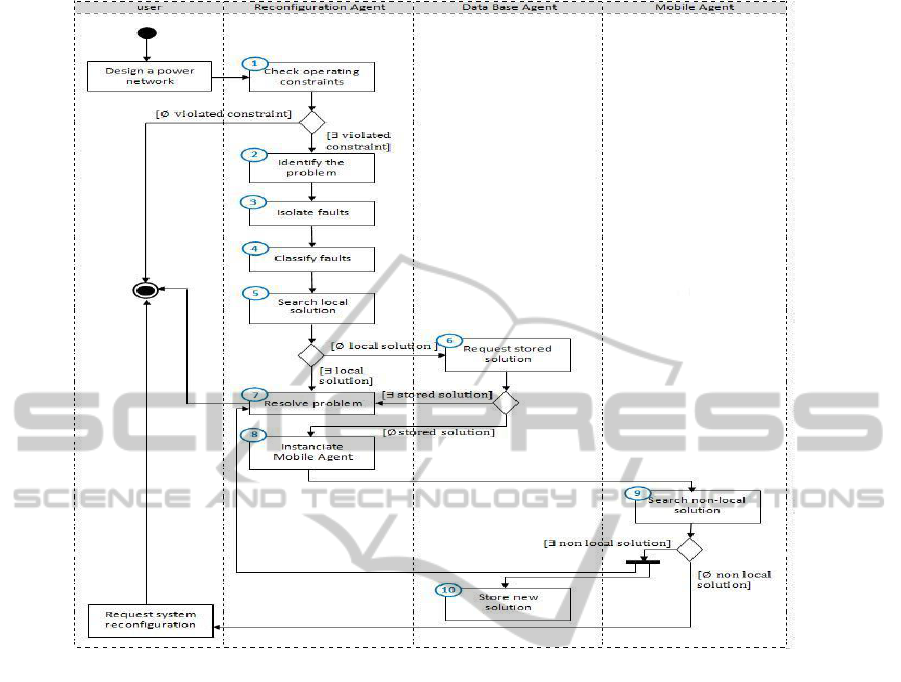
Figure 2: Activities diagram relative to the proposed MAS.
3.3 FDIRSY
To test, validate and evaluate our approach, we have
developed in Java, FDIRSY, a Fault Detection, Iso-
lation and Recovery SYstem. It provides the fol-
lowing services: (i) design and simulation of smart
grids composed of electrical components (genera-
tors, transformers, consumers) and lines (principal
and emergency ones) belonging to the high, medium
and low voltage levels, (ii) checking operating condi-
tions to detect, localize and identify problems, even-
tually, occurred in the simulated smart grid, (iii) iso-
lation of the detected problem to avoid propagation,
(iv) classification of the occurred faults relative to the
encountered problem and (v) searching for solution to
recover the failed power grid.
4 IMPLEMENTATION
In this section, we describe the functioning of the pro-
posed simulator FDIRSY. We begin by detailing and
giving some algorithms relative to the tasks ensured
by RAgents followed by those ensured by MAgents.
4.1 RAgent Implementation
An RAgent is responsible of supervising the proper
functioning of the sub-grid under its scope. Let RA
i
be
the RAgent supervising the i
th
smart sub-grid denoted
by SSG
i
. RA
i
ensures the following tasks:
• Check Operating Constraints
FDIRSY allows RA
i
to investigate the healthy opera-
tion of SSG
i
. In fact, RA
i
checks the operating condi-
tions over SSG
i
; the activation, stability and flowing
load constraints. Algorithm 1 provides the set of the
violated constraints (VC(SSG
i
)), below, the descrip-
tion of the several used functions:
- A(X): returns the activation state of an electrical
component or line X as a boolean value (true if ac-
tivated and false if deactivated),
- Freq(C): returns the frequency of an electrical com-
ponent C,
- Volt(L): returns the voltage value of an electrical line
L,
AnEfficientSimulatorforFaultDetectionandRecoveryinSmartGrids-FDIRSY
135

- ReqL(C) and ReceivL(C): returns, respectively, the
required and received loads by a consumer C.
Algorithm 1: Checking Operating Constraints.
Require: SSG
i
Ensure: VC(SSG
i
)
VC(SSG
i
) ←
/
0
if (∃C ∈ SSG
i
\A(C) = f alse or Freq(C) 6=
De f aultFreq or C does not respect its capacities
or ReqL(C) < ReceivL(C)) then
add violated constraint(C) to VC(SSG
i
)
if (∃pL ∈ SSG
i
\A(L) = f alse or Volt(L) 6=
De f aultVolt or L does not respect its capacities)
then
add violated constraint(pL) to VC(SSG
i
)
• Identify Problem
When there is, even at least, one violated constraint
(VC(SSG
i
) 6=
/
0), RA
i
proceeds, in 2, to identify the
encountered problem ep(VC(SSG
i
)). In fact, it is
an important step to localize the failed components
( f cL(SSG
i
)) and lines ( f lL(SSG
i
)) in order to guide
the recovery procedure since each problem type is re-
solved differently. Moreover, it is a useful step to up-
date the data base. We note that each failed compo-
nent corresponds to a fault. It should be noted that
several faults can occur simultaneously following to
more than one violated constraint (one problem).
Algorithm 2: Problem Identification.
Require: VC(SSG
i
)
Ensure: f cL(SSG
i
), f lL(SSG
i
), ep(VC(SSG
i
))
f cL(SSG
i
) ←
/
0, f lL(SSG
i
) ←
/
0
for each vc ∈ VC(SSG
i
)
switch (constraint type of vc)
case activation:
ep(VC(SSG
i
)) ← deactivation problem
case stability:
ep(VC(SSG
i
)) ← instability problem
case flowing load:
ep(VC(SSG
i
)) ← problem on flowing loads
end switch
update( f cL(SSG
i
), ep(VC(SSG
i
)))
update( f lL(SSG
i
), ep(VC(SSG
i
)))
end for
• Isolate Failed Components / Lines
Once the encountered problem is identified, RA
i
should isolate the failed components and lines
( f cL(SSG
i
) and f lL(SSG
i
)) -by deactivating them- in
order to avoid the failure propagation to the non-failed
connected components.
• Classify Faults
We detail, in Algorithm 3 how, RA
i
classifies
the identified faults by dominance or by equiva-
lence ( f t( f cL(SSG
i
))). We note that the function
VoltLevel(X) returns the voltage level of an electric
component X (1, 2 or 3 for, respectively, the high,
medium or low voltage levels).
Algorithm 3: Fault Classification.
Require: f cL(SSG
i
)
Ensure: f t f cL(SSG
i
)
min ← minimum VoltLevel( f cL(SSG
i
))
C
min
← {c ∈ f cL/VoltLevel(c) = min}
if (|C
min
| = 1) then
f t( f cL(SSG
i
)) ← dominance
dominant fault(( f cL(SSG
i
)) ← C
min
dominated faults(( f cL(SSG
i
)) ← ( f cL(SSG
i
) \
C
min
elsif (|C
min
| > 1) then
f t( f cL(SSG
i
)) ← equivalence
equivalent faults ( f cL(SSG
i
) ← C
min
• Search Local Solution
According to the identified type of the occurred faults
( f t( f cL(SSG
i
))), RA
i
is guided to resolve pertinently
the encountered problem based on the strategy of fault
management described in Section 3.1. In order to
optimize the search for solution as well as the net-
work route, RA
i
follows a flexible strategy. It begins
by searching a local solution that consists of a de-
activated local emergency line (∈ SSG
i
). This line
should procure sufficient load to supply the compo-
nent(s) outputted by Algorithm 3. If there exist more
than one solution, RA
i
choose the one providing the
bigger Remaining Load (RL = ReceivLoad(x) - Re-
qLoad(x)).
• Search Non-local Solution
When no local solution is found, RA
i
begins by look-
ing for a solution previously stored on the data base
by requesting the DBAgent about the encountered
problem relative to SSG
i
. In fact, our system may
have encountered and solved this problem before-
hand. If there is no stored solution, RA
i
looks for new
non-local solution from the other connected sub-grids
through MAgent(s).
4.2 MAgent Implementation: Non-local
Solution Search
In case of neither local solution nor stored solution,
RA
i
creates a MAgent MA
j
on the failed component
C. MA
j
visits all the connected devices to C through
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
136

the existing outgoing lines called paths in order to
collect useful information about; (i) Cumulative Re-
maining Load (CRL), (ii) Cumulative Priority (CPr)
and (iii) End of the taken Path (EoP is equal to true
if there is no longer component to be visited and false
otherwise). MA
j
is destructed when it reaches EoP
(there is no longer component to be visited) or when
the calculated CRL is negative (invalid sub-solution).
If MA
j
reaches its EoP with positive CRL, the taken
path presents a solution. Before the destruction, MA
j
notifies its creator by sending a message containing
the collected information. Algorithm 4 describes how
MA
j
operates. Thus, all the existing alternatives are
investigated since the created MAgent(s) visit(s) all
the neighboring power sub-grids.
Algorithm 4: MAgent Movement.
for each visited component Y do
calculate (CRL; CPr)
if (CRL(Y ) < 0) then Send Message to
RA
i
(CRL,CPr)
elsif (@ outgoing lines from Y) then EoP ← true
Send Message to RA
i
(CRL,CPr, EOP)
else EOP ← false
send message to RA
i
(RL,CPr,EoP)
switch (number of outgoing lines from Y )
case =1:
Move on Z, the unique connected component,
to Y
call Mobile Agent Movement on Z)
case > 1:
clone on each connected component
for each clone do
call MAgent Movement
end for
end switch
end for
5 SIMULATIONS
In this section, we present an example of an electrical
grid including the three voltage levels (high, medium
and low). The first contains 2 power generators and
4 lines. The second one comprises 4 transformers, 7
consumers and 18 lines including 5 emergency ones.
Finally, the third level involves 6 transformers, 17
consumers and 24 lines including 7 emergency ones.
We circled, in red, the electric components to which
FDIRSY assigned RAgents and we drawn the emer-
gency lines in yellow. We begin by presenting two
fault cases; the first one is locally resolved while the
second requires a solution from the other connected
sub-grids. Then, we study the behavior of FDIRSY
in terms of required time, exchanged messages and
recovery rate by running on multiple injected prob-
lems. Figure 3 illustrates the simulation of the studied
smart grid by FDIRSY as well as the principal inter-
face of FDIRSY allowing user to design and parame-
terize a power grid (all types of electrical components
and lines).
• Local Resolution
Let us consider, in the first case locally resolved, that
there is a voltage instability problem p on the LVL
going from LVT6 to LC13. The concerned RAgent
looks for the existence of solution to LC13 on which
the dominant fault occurs. The solution consists of
activating the emergency line going from LC12 to
LC13. The required time for resolving p, denoted by
TG(p), is smaller than 1.8 µs (Table 1). Thanks to the
proposed fault categorization, FDIRSY resolves only
the fault on LC13 (corresponding to the dominant
fault) instead of searching for solutions (for LC13 and
LC16). Thus, TG(p) is reduced. The recovery is per-
formed at 100% as all the occurred faults are resolved.
Table 1: Local Recovery for Dominant Fault on LC13
Task Description CPU
Detection
detects voltage pro-
1 ηs
blem on LV L
Isolation
deactivates the fai-
< 1 ηs
led LV L
Fault Dominant Fault on
1,6 ηsCategori- LC13 and domina-
zation ted fault on LC16
Local ∃ emergency line
1,76 µssearch between LC12 and
(onLC13) LC13
Resolution
activate the found
< 1 ηs
emergency line
TG(p)
p is a voltage insta-
< 1, 8 µsbility problem
• Non Local Resolution
Let us consider, in the second case, that there is a fre-
quency problem p on LV T 5 which is resolved thanks
to the instantiation of the MAgents. The new found
solution consists on activating the non-local emer-
gency line connecting LC17 to LC3. The required
time, T G(p), is smaller than 20 µs (2). It presents,
also, a comparison between CPUs when p occurs for
the first time and for the second or n
th
time. The use
of data base updated at run-time makes our approach
gainful in terms of exchanged messages and CPUs.
The recovery is performed at 75% as there are 3 re-
paired components from 4 failed ones. In fact, we can
not propose a software solution for both frequency
AnEfficientSimulatorforFaultDetectionandRecoveryinSmartGrids-FDIRSY
137

Figure 3: An example of smart power grid simulated by FDIRSY.
and instability problems as they need a physical hu-
man intervention. Thus, we look for resolving, only,
the engendered faults (like in this case).
• Multiple Problem Resolution
In the last part of this section, we begin by estimating
the required time TG for recovery in the studied power
network. For that, we execute our system on multi-
ple problems at the same time and at different times.
In order to estimate the best and the worst TG, we
run FDIRSY with multiple problems over the small-
est and the bigger sub-grids at different times. These
sub-grids are, respectively, composed of (3 compo-
nents, 3 lines) and (6 components and 5 lines). In fact,
the best and worst T G(p) represent, respectively, the
time spent to recover locally the first one and non-
locally the second one (respectively equal to 1, 45 ηs
and 21 µs). We run, also, FDIRSY over the studied
smart grid - which is composed of 12 sub-grids - on
multiple faults at the same time. Figure 4 illustrates
the T G spent to resolve p problems at the same time
(at most p = 8).
It is, also, important to investigate the communi-
cation process between MAgents, RAgents and the
DBAgent. For a given problem p at a time t; (i) if p is
locally resolved, there is 0 exchanged messages, (ii)
if p requires a non-local solution yet found, there is 1
exchanged message and (iii) if p requires a new non-
local solution, the number of exchanged messages is
equal to the number of the existing paths to which we
Table 2: Non-Local Recovery for Dominated Faults on
LC11, LC15 and LC17
Task
Occurrence of p
1
st
n
th
Detection
detect frequency pro-
1 ηs
blem on LV T 5 1 ηs
Isolation
deactivate the failed
< 1 ηsline between LV T 5 and
LC11 < 1 ηs
Fault dominant fault on LV T 5
4,8 µsCategori- and dominated faults on
zation LC11, LC15 and LC17
4,8 µs
/
0 local solution for both
3 ηsLocal of dominated and domi-
search nant faults 3 ηs
DBAgent
/
0 stored solution 2 µs 2,8 µs
Request
Search create MAgent on LC11
0snon local moving to the sub-grid
solution supplied by LV T 2 13 µs
Resolution
activate the found emer-
< 1 ηs
gency line < 1 ηs
TG(p)
p is a frequency pro-
< 7, 6 µs
blem on LV T 5 < 20 µs
add two messages (for the DBAgent request and for
updating data base).
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
138
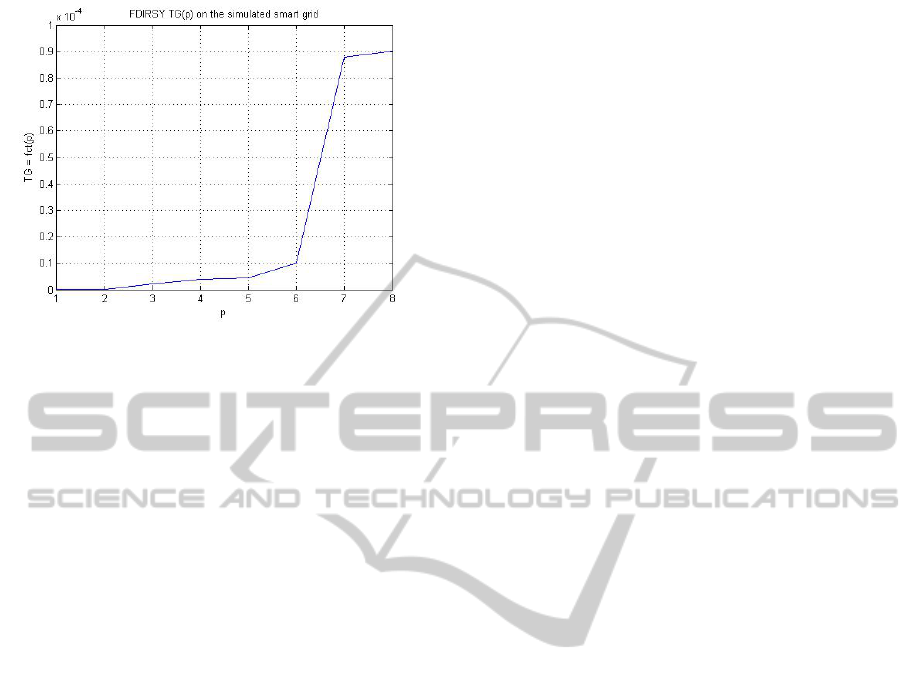
Figure 4: TG for resolving multiple problems.
6 CONCLUSION
In this paper, we propose an original approach for ef-
ficient smart power grid recovery. In order to eval-
uate the proposed approach we develop a simulator
for smart grids. It ensures the detection of the faults,
the identification of the encountered problem and the
localization of the failed electrical components (even
the consequent ones) thanks to the proposed fault cat-
egorization. It resolves the problems and searches the
existing solutions according to the defined strategy.
The experimental study showed that our approach is
gainful in terms of faults to be resolved, CPU and
communication. In future works, we look for intro-
ducing a learning module in order to deduce new so-
lutions from other existing ones. We are, also, inter-
ested in large scale tests for larger power grids.
REFERENCES
Ben Meskina, S., Doggaz, N., and Khalgui, M. (2014). New
solutions for fault detections and dynamic recoveries
of flexible power smart grids. In 9
th
International
Conference ICINCO in Informatics in Control, Au-
tomation and Robotics.
Calderaro, V., Hadjicostis, C. N., Piccolo, A., and Siano, P.
(2011). Failure identification in smart grids based on
petri net modeling. IEEE Transactions on Industrial
Electronics, pages 4613 – 4623.
Chertkov, M., Pan, F., and Stepanov, M. G. (2011). Predict-
ing failures in power grids: The case of static over-
loads. IEEE Transactions on Smart Grid.
Fang, X., Misra, S., Xue, G., and Yang, D. (2012). Smart
grid - the new and improved power grid: A survey.
IEEE Communications Surveys and Tutorials.
Jiang, Z., Khalgui, M., Mosbahi, O., and Jaouadi, A.
(2014a). A novel hierarchical multi-agent architecture
for automatic restoration of smart grids. International
Journal of Control and Automation.
Jiang, Z., Mosbahi, O., and Khalgui, M. (2014b). A multi-
agent architecture for the self-healing of sgs based
on iec 61499/61850. Energy Education Science and
Technology Part A. Energy Science and Research.
Massoud, A. and Wollenberg, B. (2005). Toward a smart
grid: power delivery for the 21st century. In IEEE
Power and Energy Magazine, Minneapolis, MN,
USA.
McArthur, S. D. J., Davidson, E. M., Catterson, V. M.,
Dimeas, A. L., Hatziargyriou, N. D., Ponci, F., and
Funabashi, T. (2007a). Multi-agent systems for
power engineering applications - part i: Concepts, ap-
proaches, and technical challenges. In IEEE Transac-
tions on Power Systems.
McArthur, S. D. J., Davidson, E. M., Catterson, V. M.,
Dimeas, A. L., Hatziargyriou, N. D., Ponci, F., and
Funabashi, T. (2007b). Multi-agent systems for power
engineering applications part ii: Technologies, stan-
dards, and tools for building multi-agent systems. In
IEEE Transactions on Power Systems.
Oudalova, A. and Fidigattib, A. (2009). Adaptive network
protection in microgrids. International Journal of Dis-
tributed Energy Resources.
Pipattanasomporn, M., Feroze, H., and Rahman, S. (2009).
Multi-agent systems in a distributed smart grid: De-
sign and implementation. In IEEE/PES Power Sys-
tems Conference and Exposition, Adv. Res. Inst., Vir-
ginia Tech, Arlington, VA.
Rahman, S., Pipattanasomporn, M., and Teklu, Y. (2007).
Intelligent distributed autonomous power systems
(idaps). In IEEE Power Engineering Society General
Meeting, Adv. Res. Inst. of Virginia Tech, Arlington,
VA.
Ramchurn, S. D., Vytelingum, P., Rogers, A., and Jennings,
N. (2011). Agent-based control for decentralised de-
mand side management in the smart grid. In The 10th
International Conference on Autonomous Agents and
Multiagent Systems. International Foundation for Au-
tonomous Agents and Multiagent Systems.
Russell, B. D. and Benner, C. L. (2010). Intelligent systems
for improved reliability and failure diagnosis in distri-
bution systems. IEEE Transactions on Smart Grid.
Vyatkin, V., Zhabelova, G., Ulieru, M., and McComas, D.
(2010). Toward digital ecologies: Intelligent agent
networks controlling interdependent infrastructures.
In First IEEE International Conference on Smart Grid
Communications (SmartGridComm).
AnEfficientSimulatorforFaultDetectionandRecoveryinSmartGrids-FDIRSY
139
