
EDeg-fs
A Heuristic for Scheduling and Dynamic Power Management in Embedded Energy
Harvesting Systems with DVFS Facilities
Hussein El Ghor
1
and Maryline Chetto
2
1
Lebanese University, IUT of Saida, Saida, Lebanon
2
IRCCyN Laboratory, University of Nantes, 1 Rue de la Noe, F-44321 Nantes, France
Keywords:
Real-time, Energy Harvesting, Power Management, Dynamic Voltage and Frequency Selection (DVFS), Task
Scheduling.
Abstract:
This work investigates the problem of dynamic power management and scheduling for a uniprocessor system
with dynamic voltage and frequency scaling (DVFS) facilities. This one is qualified as real-time since jobs
have to be executed before deadlines. In addition, it is an energy harvesting system since its supply energy
is drawn from the environment. We assume that the preemptable jobs receive dynamic priorities according to
the Earliest Deadline First (EDF) rule. We propose to extend the dynamic power management scheme called
EDeg that must be adapted to a processor with DVFS capabilities. We show how to adjust dynamically the
frequency in order to gain quality of service measured in terms of deadline miss rate.
1 INTRODUCTION
Environmental energy harvesting is deemed promis-
ing for the supply of embedded and wireless sen-
sor systems. Many sensing environments provide en-
ergy that can be harvested and converted into elec-
tricity so as to power these systems on an infinite
time. Consequently, energy harvesting can make
them self-sufficient often for decades (Roundy et al.,
2004), having a behavior which is called energy neu-
tral. For example, wireless distributed sensor net-
works (WDSN) (Lewis, 2004) are mainly used in
critical conditions like natural catastrophe and arti-
ficial disruptions. The main role of WDSN is to
help in monitoring physical and environmental con-
ditions like temperature and pressure. However,
WDSN have some drawbacks that are limited bat-
tery life and less processing efficiency (Nallusamy
and Duraiswamy, 2011). Therefore, energy harvest-
ing seems to be an appropriate approach to increase
the life time of WDSNs in environmental applica-
tions. Several technologies to extract energy from the
environment have been demonstrated including so-
lar, motion-based, biochemical, and vibrational ener-
gies. Many other ones are being developed (Kotz and
Carlen, 2000). And many prototypes for energy har-
vesting have been described in the scientific literature.
The first ones are certainly Heliomote (Raghunathan
et al., 2005) and Prometheus (Jiang et al., 2005).
The work presented in that paper provides the fol-
lowing contributions to research: We present an on-
line algorithm that permits to answer the three follow-
ing questions dynamically: how and when to decide
whether to put the processor in idle or active mode?
How to select the active task? How to compute the
frequency of the processor for executing the selected
task? Our scheduler is model-free with respect to the
energy source i.e. it can be implemented without prior
information about the source which may be uncon-
trollable and time-varying. The power management
policy is based on trading the slack time and the slack
energy for energy efficiency. And the DVFS technol-
ogy enables us to achieve the lowest energy dissipa-
tion. The Quality of Service in terms of deadline suc-
cess ratio is improved.
The rest of this paper is organized as follows. The
energy harvesting system model and some assump-
tions are described in Section 2. Section 3 gives nec-
essary backgroundmaterials. Section 4 introduces the
proposed scheduling and power management frame-
work. Section 5 presents the related research works.
We summarize and describe our current work in Sec-
tion 6.
140
El Ghor H. and Chetto M..
EDeg-fs - A Heuristic for Scheduling and Dynamic Power Management in Embedded Energy Harvesting Systems with DVFS Facilities.
DOI: 10.5220/0005247401400145
In Proceedings of the 5th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2015), pages
140-145
ISBN: 978-989-758-084-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
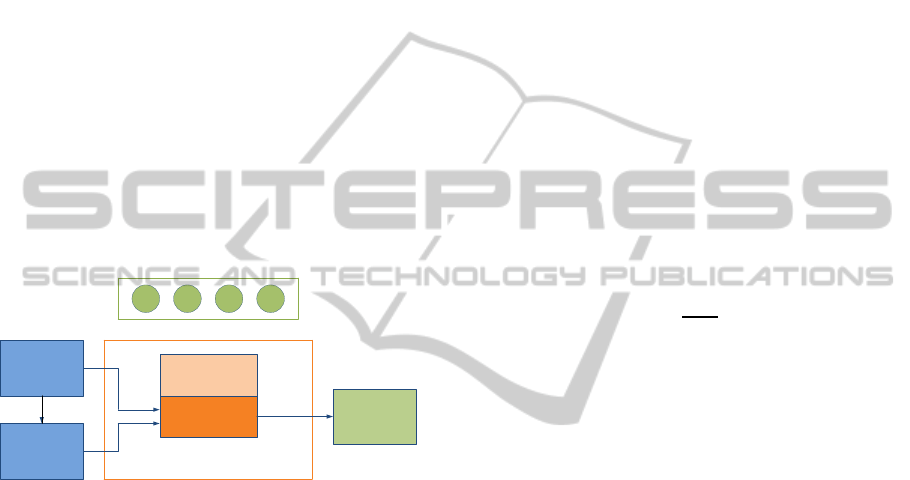
2 SYSTEM MODEL AND
TERMINOLOGY
The real-time energy harvesting system considered in
this work consists of three major units: energy har-
vesting unit (EHU), energy storage unit (ESU) and
energy dissipation unit (EDU). The energy harvest-
ing unit harvests the energyfrom external sources like
sun, wind, etc. The harvested energy is stored in the
energy storage unit for future use at any time since
it does not leak any energy over time. This helps
continuous execution of tasks even at times of defi-
ciency. Apart from the applications running in the
energy dissipation unit, there is an additional soft-
ware running in the uniprocessor system, namely the
scheduler. Earliest deadline First (EDF) is the first dy-
namic priority scheduler used in our algorithm. The
other used scheduler is the DVFS which slows down
task execution under deadline constraints depending
on the energy harvested and energy in the storage unit.
T1 T2 T3 Tn
Ready Queue
Uniprocessor Computing System
EDF Scheduling
Dynamic Voltage and
Frequency Scaling
Energy Harvesting
Unit
Energy Storage Unit
Pr(t)
Scheduled Tasks
{T1,T2,…,Tn}
Figure 1: A Real-Time Energy Harvesting System model.
2.1 Energy Harvesting Unit (EHU)
We assume that ambient energy is harvested and con-
verted into electrical power. We cannot control the
energy source but we can predict the expected avail-
ability with a lower bound on the harvested source
power output, namely P
s
(t). Clearly, we make no as-
sumption about the nature and dynamics of the en-
ergy source, making our approach more easily imple-
mented in real systems where data about the energy
source may not be available beforehand.
The energy harvested in an interval of time [t
1
,t
2
]
is denoted by E
s
(t
1
,t
2
) and can be calculated using the
following formula:
E
s
(t
1
,t
2
) =
Z
t
2
t
1
P
s
(t)dt (1)
2.2 Energy Storage Unit (ESU)
We use in our work an ideal energy storage unit (su-
percapacitor or battery) that can be recharged up to
a nominal capacity C. Since we use an ideal energy
storage unit, then the amount of energy wasted in the
process of charging and discharging is neglected. The
energy level has to remain between two boundaries
C
min
and C
max
with C = C
max
−C
min
. The lower limit
of the energy storage unit (C
min
) is not zero since there
must always be a reserved energy in the energy stor-
age unit for worst case scenarios.
2.3 Energy Dissipation Unit (EDU)
We consider a real-time system equipped with a
DVFS-enabled processor. The variable speed proces-
sor is assumed to be working with N discrete frequen-
cies ranging from f
min
= f
1
≤ f
2
≤ ··· ≤ f
N
= f
max
.
The total energy consumption of a running job in the
processor depends on the processor’s frequency. The
power consumption and voltage level relative to clock
frequency f
k
are denoted by P
k
and V
k
respectively.
We consider the slowdown factor S
k
as the fre-
quency f
k
which is normalized with respect to the
maximum frequency f
max
. S
k
ranges from S
min
to 1:
S
k
=
f
k
f
max
(2)
We consider that each task is characterized by dif-
ferent power dissipation values according to the se-
lected processor frequency. Any job that results from
task execution has maximum energy consumption if
executed entirely at maximum frequency; And higher
is the processor frequency higher is the energy con-
sumption of the job.
Consequently, besides its timing parameters, ev-
ery task τ
i
is characterized by N values that respec-
tively correspond to their worst case energy consump-
tion for each of the N different processor frequencies.
The application software is composed of indepen-
dent preemptable periodic tasks: Γ = {τ
i
|1 ≤ i ≤
n}. A 3-tuple (C
i
,D
i
,T
i
) characterizes task τ
i
, where
C
i
, D
i
and T
i
indicate the worst case execution time
(WCET) at maximum frequency, the relative deadline
and the period respectively. τ
i
generates an infinite set
of jobs that release at times kT
i
, k = 0,1,2,· ··. When
we stretch any job of task τ
i
by a slowdown factor
S
k
, then its actual execution time (C
i
(a)) at frequency
f
k
will be C
i
/S
k
. When the processor is running at
it maximum frequency, then C
i
(a) = C
i
. We assume
that 0 ≤ C
i
≤ D
i
≤ T
i
for each 1 ≤ i ≤ n.
EDeg-fs-AHeuristicforSchedulingandDynamicPowerManagementinEmbeddedEnergyHarvestingSystemswith
DVFSFacilities
141

3 BACKGROUND MATERIAL
3.1 EDF Scheduling
The problem of scheduling deadline constrained tasks
on one processor with no energy consideration has
been an active area of research for more than thirty
years (Liu, 2000). One of the most popular ap-
proaches is the dynamic priority driven scheduling
algorithm, known as Earliest Deadline First (EDF).
EDF schedules at each instant of time t, the ready
job (i.e. the job that may be processed and is not yet
completed issued from the task set) whose deadline
is closest to t. EDF has been proved to be optimal
in that sense that if a task set is schedulable by any
algorithm, then it can be feasibly scheduled by EDF.
Moreover, EDF fully exploits the processor, reaching
up to 100% of the available processing time. In gen-
eral, implementation of EDF consists in ordering jobs
according to their absolute deadline either as soon as
possible (EDS) or as late as possible (EDL) (Chetto
and Chetto, 1989), (Silly-Chetto, 1999).
In a system with limitations and fluctuations in
energy availability, simply executing jobs according
to the EDF rule, either as soon as possible (EDS) or
as late as possible (EDL) may lead to violate some
deadlines because of energy starvations. This is why,
in energy constrained systems, dynamic power man-
agement plays a crucial role due to its impact on the
resulting performance. The dynamic power manage-
ment rule will permit to decide when to put the pro-
cessor in the active mode and for how long time.
The objective of such a policy is to prevent from en-
ergy starvation while still preserving the system from
deadline violation.
3.2 EDeg Scheduling
In a recent work, we provided a dynamic power man-
agement policy called EDeg (Earliest Deadline with
energy guarantee) . EDeg orders the ready jobs ac-
cording to the EDF rule but performs a test before
dispatching the highest priority job so as to prevent
from energy starvation. More precisely, if the deci-
sion test receives a “yes” answer, the processor is au-
torized to be in the active mode since two conditions
can be satisfied. Firstly, the energy level in the battery
is sufficient enough to execute the active job. Sec-
ondly, executing the active job will not provoke any
energy starvation including for a future occurring job.
We introduced the concept of slack energy of a job
defined as the maximum energy that could be con-
sumed by a lower priority job for avoiding its energy
starvation. And the so-called system slack energy rep-
resents the maximum energy that could be consumed
at the current time while guaranteeing absence of en-
ergy starvation in the system.
The decision test may lead to a “no” answer thus sig-
nifying that the processor has to sleep so that the en-
ergy storage unit recharges sufficiently. Deciding for
how long time recharging should be performedis very
flexible. Nevertheless, the best solution is to recharge
the battery at its entire capacity whenever possible,
as long as all the deadlines can still be met despite
execution postponement. As a consequence, such ap-
proach requires to compute at run-time the so-called
slack time of the system whenever necessary in order
to avoid any deadline missing.
3.2.1 Computation of Slack Time
The slack time of a hard deadline set of jobs (which
generally are issued from a periodic task set) at cur-
rent time t is the length of the longest interval starting
at t during which the processor may be idle continu-
ously while still satisfying all the timing constraints.
The determination of slack time at run-time for jobs
issued from a periodic task set can be performed effi-
ciently through a method initially described in (Silly-
Chetto, 1999). Some parts of the computation are
performed once for all and permit to limit the online
overhead.
3.2.2 Computation of Slack Energy
Let P
s
(k) be the source power that varies with time
k and C(t) be the energy storage capacity at time t.
Let A
j
be the total energy demand of jobs ready to
be processed between t and d
j
with a higher priority
than job J
j
. Consequently, A
j
=
∑
d
k
≤d
j
E
k
. The slack
energy of any job J
j
, Slack.Energy(J
j
,t), is given by
C(t) +
R
d
j
t
Ps(k)dk− A
j
.
The slack energy at current time t,
Slack.Energy(t), is defined as the maximum
amount of energy that can be consumed from t
by the currently highest priority job. Consequently,
Slack.Energy(t) is given by the minimal slack energy
from the all the jobs with a priority higher than one
of the active job.
4 THE EDeg-fs ALGORITHM
We are now ready to describe a new scheduling and
power management scheme called EDeg-fs (EDeg
with frequency scaling facilities). We will show how
to optimize the energy consumption of jobs with the
dynamic voltage and frequency scaling facilities of
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
142

the processor. In addition to the functionalities of
EDeg, EDeg-fs selects the execution speed of a run-
ning job from the stored energy as well as the avail-
able harvested energy and deadline of that job.
4.1 Description of EDeg-fs
The idea behind the EDeg-fs algorithm is to still or-
der the jobs according to the EDF rule. The EDeg-
fs schedule differs from the EDF schedule in that the
jobs are not executed as soon as possible with the clas-
sical work-conserving manner. In addition, EDeg-fs
differs from EDeg in that it decides when to execute
jobs at full processor speed and when to decrease the
processing: speed.
Before authorizing a job to execute, it must be
guaranteed that the energy level in the storage be suf-
ficient to provide energy for all future occurring jobs,
be given their energy requirements and the replenish-
ment rate of the storage unit. In other words, sufficient
energy must permit to execute this job completely.
This is realized by computing the slack energy of the
active job as described in the EDeg algorithm. If the
slack energy is negative, this signifies that energy fea-
sibility can be guaranteed only by decreasing the en-
ergy consumption of some jobs through adaptation of
the processor frequency.
Let assume that jobs are ordered according to re-
lease time.If the job J
i
starts execution at current
time t, its finishing time could be at least ft
i
= t +
Slack.Time(t)) while guaranteeing the timing feasi-
bility of the system. That means that in the worst case,
the maximal energy that could be consumed between
t and ft
i
is C(t) + E
s
(t, ft
i
). Consequently, we look
for the slowdown factor, namely S
1
that leads to an
energy consumption for job J
i
that is less than C(t) +
E
s
(t, ft
i
). Necessarily, the selected slowdown value
should satisfy S ≥ S
1
. In the other hand, we compute
the processor speed so that C
i
(a) = Slack.Time(t).
The slowdown factor must satisfy S ≤ S
2
with S
2
=
C
i
Slack.Time(t)
. Finally, the selected slowdown factor is
the lowest value that satisfies both S ≥ S
1
and S ≤ S
2
.
Such a computation of the slowdown factor permits
to guarantee both the timing and energy requirements
of the system. If no such a value exists then, the job
should be discarded.
The major components of the EDeg-fs algorithm
are C(t), Slack.Energy(t) and Slack.Time(t) where
t is the current time, C(t) the amount of energy
that is currently stored at time t i.e. the remaining
amount of energy in the energy storage at time t.
Slack.Energy(t) and Slack.Time(t) are respectively
the slack energy of the system and the slack time of
the system at time t. The function execute() puts the
processor in the active mode for executing the ready
job with the earliest deadline.
The EDeg-fs algorithm works as follows: First,
EDeg-fs checks if there are jobs in the ready queue. If
not, the processor is made idle until the next release
time. Otherwise, EDeg-fs selects the highest priority
job ready for execution.
Before authorizing the execution of that job,
EDeg-fs computes first the slack energy and second
the energy level in the storage. If the system slack en-
ergy is positive and there is sufficient energy for exe-
cution, then the job will be executed with the high-
est speed. Otherwise, the processor speed is com-
puted from the slack time of the system which leads
to stretch the execution of the job without violating
deadlines. As decreasing the instantaneous process-
ing speed leads to decrease the total energy consumed
by the running job, the level of energy in the storage
will be decreasing more slowly than with the highest
processor speed.
The main contributions of EDeg-fs can be sum-
marized as follows: The energy optimization process
is based on both energy limitations and timing con-
straints. It fully explores the possibility of trading
both the slack time and slack energy for energy sav-
ing especially when considering multiple jobs in the
queue at the same time. It allows DVFS techniques
to achieve lowest energy dissipation while respecting
deadlines. And it avoids wasting the over low energy.
Energy is wasted only when there are no pending jobs
and the storage unit is full.
4.2 Illustrative Example
Let us consider the three following periodic tasks.
τ
1
= (1, 3,5), τ
2
= (2,7,10) and τ
3
= (3, 12, 20). We
assume that the energy storage capacity is C = 200
energy units at t = 0. For simplicity, we assume that
the rechargeable power P
s
is constant along the hyper-
period (least multiple of the periods) equal to 10. The
processor has eight discrete slowdown factors: 1, 0.8,
0.7, 0.5, 0.4, 0.3 ,0.2 and 0.1. The total energy con-
sumption of every periodic task τ
i
is shown in table
1.
Let us execute the jobs generated by the task set
Γ according to EDeg-fs within the first hyperperiod
from 0 to 20. The EDeg-fs schedule for Γ is illustrated
by figure 2.
We notice that Γ is schedulable since all tasks are
executed without violating deadlines and without get-
ting out of energy. At timet = 0, all tasks are ready. τ
1
is the highest priority task and is executed until t = 1
where C(1) = 180 energy units. At time t = 1, τ
2
is
executed until t = 3 where C(3) = 120 energy units.
EDeg-fs-AHeuristicforSchedulingandDynamicPowerManagementinEmbeddedEnergyHarvestingSystemswith
DVFSFacilities
143

Table 1: Energy dissipation of tasks τ
i
.
Energy Dissipation S = 1 S = 0.8 S = 0.7 S = 0.5 S = 0.4 S = 0.3 S = 0.2 S = 0.1
Task τ
1
30 25 20 15 11 8 6 3
Task τ
2
80 65 55 40 32 24 16 10
Task τ
3
180 140 125 90 70 55 35 20
Ƭ
1
Ƭ
2
Ƭ
3
103 7 8
11 15
18 200
0.2
0.6
1.0
Ƭ
1
Ƭ
1
t
S
i
Ƭ
2
Ƭ
1
Figure 2: Schedule produced by EDeg-fs.
At t = 3, τ
3
is the highest priority task ready to be pro-
cessed but it cannot run at maximum speed because of
insufficient energy in the battery. So, we have to slow-
down the processor in such a way that the deadline is
not violated. We have Slack.Time(3) = 4. Thus, the
actual execution time for τ
3
could be 4 and the slow-
down factor is 3/4. Consequently, the energy dissipa-
tion for τ
3
is E
3
= 140. (see table 1). In the other side,
as C(3) + E
s
(3,7) = 160, we notice that it is possible
to execute τ
3
as regards it new energy consumption
equal to 140 energy units.
Now, τ
3
is executed from t = 3 to t = 7 with a
slowdown factor 0.75 where C(7) = 20 energy units.
At time t = 7, τ
1
is executed until t = 8 where the
battery is fully discharged. The processor is then idle
from time t = 8 until t = 10 whereC(10) = 20 energy
units. At time t = 10, τ
1
is executed until t = 11 where
the battery is fully discharged. τ
2
is now ready to be
processed, but it cannot run at maximum speed since
the battery is fully discharged. Slack time is equal
to 2, the actual execution time for τ
2
is equal to 4
and the slowdown factor is 0.5. According to table 1,
E
2
= 40 energy units. Now, τ
2
is executed fromt = 11
to t = 15 with a slowdown factor equal to 0.5 where
C(15) = 0 energy units. This procedure continues till
the end of the hyperperiod where C(20) = 39 energy
units.
Let us now consider the EDeg schedule where
all the jobs are processed at the constant highest fre-
quency (see figure 3). The total energy consumed un-
der EDeg-fs is about 22 percent less than under EDeg
Ƭ
1
Ƭ
2
104 5 8
11 15
18 200
0.2
0.6
1.0
Ƭ
1
t
S
i
Slack time =4
Energy Storage is
insufficient to complete
execution
Figure 3: Schedule produced by EDeg.
while still guaranteeing the timing requirements of all
the jobs. We may consider that EDeg-fs has signifi-
cant improvement over EDeg for that illustrative ex-
ample.
5 RELATED WORK
Energy harvesting systems design has been exten-
sively studied in the past years. In practice, the total
energy which can be consumed by a task is not nec-
essarily proportional to its execution time and slack
time is not used for energy savings. Clearly, as an
embedded system uses a unique energy storage con-
sidered as the critical resource of the system, a suc-
cessful power-awarescheme must consider these non-
computation activities and coordinate their power us-
age as a whole system. Under these assumptions,
we presented a scheduling algorithm, EDeg (Earliest
Deadline with energy guarantee) (Ghor et al., 2011),
that takes into consideration the limits of both time
and energy. EDeg relies on two basic concepts: slack
time and slack energy. The main idea behind EDeg
is to run tasks according to the earliest deadline first
rule. However, before authorizing a task to execute,
we must ensure that the energy storage is sufficient
to execute all future occurring tasks. When this con-
dition is not verified, the processor has to stay idle
so that the storage unit recharges as much as possible
and as long as all the deadlines can still be met despite
execution postponement.
Later in (Chetto et al, 2011), we proved by per-
formance evaluations the efficiency of this sched-
uler. However, EDeg is a clairvoyant algorithm since
it needs the characteristics of the future tasks and
the energy source profile to build an optimal sched-
ule. To achieve better system performance and en-
ergy efficiency, classical priority driven scheduling
has been extendedto variable-voltageprocessors. The
idea is to save power by slowing down the processor
just enough to meet the deadlines. In (Allavena and
Mosse, 2001), A. Allavena et al. describe an off-line
scheduler that uses voltage and frequency selection
(DVFS) for a frame based system. While they per-
mit to reduce power consumption by slowing down
task execution under deadline constraints, their ap-
proach relies on the unrealistic assumption that both
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
144

the instantaneous consumption power and production
power are constant.
S. Liu et al. (Liu et al., 2008) propose an en-
ergy aware dynamic voltage and frequency selection
algorithm, called EA-DVFS, for periodic tasks. The
purpose of EA-DVFS is to efficiently use the slack
to reduce the deadline miss rate. Processors must
select between running with maximum power or re-
duced power based on the available energy. If the
system has sufficient energy, the task is executed at its
full speed; otherwise, it is stretched and executed at a
lower speed. In case of low workload, EA-DVFS al-
gorithm reduces deadline miss rate by 50% compared
to LSA and decreases the minimum storage size by
25% when the deadline miss rate is zero. The advan-
tage of EA-DVFS is that it reduces the deadline miss
rate and storage capacity in case of low overload.
Later in (Liu et al., 2012), Liu et al. presented a
harvesting-awareDVFS (HA-DVFS) algorithm to im-
prove the system performance by fully exploiting the
task slack under timing and energy constraints. HA-
DVFS utilizes adaptive scheduling techniques com-
bined with dynamic voltage and frequency selection
to reduce the deadline miss rate when compared to
LSA and EH-DVFS.
6 CONCLUDING REMARKS
In this paper we have described an integrated frame-
work for deadline constrained job scheduling, dy-
namic power management and voltage/frequency se-
lection in real-time energy harvesting systems. The
scheduler is a dynamic priority driven one that uses
the Earliest Deadline First rule. The dynamic power
management policy consists in checking the energy
feasibility through computation of the so-called slack
energy. This is to verify that deadlines will be met
while guaranteeing no energy starvation; And the
voltage/frequency selection policy slowdowns task
execution whenever the system has slack time.
We are now conducting an experimental study in
order to compare the EDeg-fs and EDeg algorithms.
We want to evaluate (in comparison to EDeg) how
much EDeg-fs permits to increase the resulting Qual-
ity of Service i.e. the deadline success ratio. More-
over, it could be interesting to show the improvement
of EDeg-fs over EDeg regarding the minimum energy
storage capacity requirement to achieve zero deadline
miss ratio.
REFERENCES
S. Roundy, D. Steingart, L. Frechette, P. K. Wright, and
J.M. Rabaey. Power sources for wireless sensor net-
works. In Proc. Euro.Workshop Wireless Sensor Net-
works, pp. 117, 2004.
R. Kotz and M. Carlen. Principles and applications of elec-
trochemical capacitors. In Electrochimica Acta 45,
pages 2483-2498. Elsevier Science Ltd., 2000.
V. Raghunathan, A. Kansal, J. Hsu, J. Friedman, and M.
B. Srivastava. Design considerations for solar energy
harvesting wireless embedded systems. In Proc. Int.
Symp. Inf. Process. Sensor Netw., pp. 457462, 2005.
X. Jiang, J. Polastre, and D. E. Culler. Perpetual envi-
ronmentally powered sensor networks. In Proc. Int.
Symp. Inf. Process. Sensor Netw., pp. 463468, 2005.
F. L. Lewis. Smart Environments: technologies, protocols,
and Applications. John Wiley, New York, 2004.
R. Nallusamy and K. Duraiswamy. Solar Powered Wireless
Sensor Networks for Environmental Applications with
Energy Efficient Routing Concepts: A Review. Infor-
mation Technology Journal, 10: 1-10, 2011.
A. Kansal, J. Hsu. Harvesting aware power management
for sensor networks. In IEEE Proceedings of design
automation conference, 2006.
J-W-S. Liu. Real-time systems. Prentice-Hall, 2000.
H. Chetto, M. Chetto. Some results of the earliest deadline
scheduling algorithm. IEEE Transactions on Software
Engineering 1989;15(10):12619, 1989.
M. Silly-Chetto. The EDL server for scheduling periodic
and soft aperiodic tasks with resource constraints.
Real-Time Systems; 17(1):125, 1999.
H. El Ghor, M. Chetto and R. Hajj Chehade. A Real-Time
Scheduling Framework for Embedded Systems with
Environmental energy Harvesting. In Computers &
Electrical Engineering, 2011.
M. Chetto, H. EL Ghor and R. Hage Chehade. Real-Time
Scheduling for Energy Harvesting Sensors. The 6th
International Conference for Internet Technology and
Secured Transactions, Abu Dhabi, UAE, December
11-14, pp. 396 - 402, 2011.
A. Allavena, and D. Mosse. Scheduling of Frame-
Based Embedded Systems with Rechargeable Batter-
ies. Proc. of Workshop on Power Management for
Real-time and Embedded Systems, May 2001.
S. Liu, Q. Qiu, Q. Wu. Energy aware dynamic voltage and
frequency selection for real-time systems with energy
harvesting. In: Proceedings of the conference on de-
sign, automation and test in Europe, p. 236241, 2008.
S. Liu, J. Lu, Q. Wu and Q. Qiu. Harvesting-Aware Power
Management for Real-Time Systems With Renewable
Energy. IEEE Transactions on Very Large Scale Inte-
gration (VLSI) Systems, Vol. 20, No. 8, August 2012.
EDeg-fs-AHeuristicforSchedulingandDynamicPowerManagementinEmbeddedEnergyHarvestingSystemswith
DVFSFacilities
145
