
SMUAP Decomposition Method Considering Estimated Distance
from Surface Electrodes to Motor Unit during Voluntary Isovelocity
Elbow Flexion
Jun Akazawa
1
and Ryuhei Okuno
2
1
School of Health Sciences and Medical Care, Meiji University of Integrative Medicine, Kyoto, Japan
2
Department of Electrical and Electronics Engineering, Setsunan University, Osaka, Japan
Keywords: Electromyogram, Motor Unit, Decomposition, Elbow Flexion.
Abstract: The purpose of this study was to decompose Surface Motor Unit Acton Potential (SMUAP) clearly even in
case that the estimated distance from surface electrodes to motor units changing during voluntary
isovelocity elbow flexion. We developed decomposition algorithm focusing on SMUAP Profile, and
investigated motor unit (MU) recruitment and firing rate in biceps short head muscle during isovelocity
elbow flexion using our developed method. As a result, we concerned that calculated MUs firing rates were
almost same as the results in the previous studies, and the estimated MU’s territory was changed with elbow
flexion. It was shown that the developed algorithm was useful for decomposing SMUAP when the
estimated distance from surface electrodes to MU changing during voluntary isovelocity elbow flexion.
1 INTRODUCTION
In the field of spots science and rehabilitation, they
had been interested in the methode to analyze the
motor units (MUs) recruitment and firing rates
during voluntary isovelocity elbow flexion
(hereinafter referred to as elbow flexion).
During elbow flexion, the distance from surface
electrodes to muscle fibres of single MU changes
slightly. It was sometimes difficult to decompose
Surface Motor Unit Action Potential (SMUAP)
clearly. So it was important to estimate the distance
between surface electrodes and the muscle fibres. In
the previous study, at first we had devised the
system to decompose SMUAP for short period with
template maching during the elbow flexion, and
investigated firing rate of MU in biceps short head
muscle (Akazawa, 2013), though, we didn’t
confirmed that the distance form surface electoredes
to motor units changing during the elbow flexion.
In this study, in order to decompose SMAUP
clearly even in case that the estimated distance from
surface electrodes to motor units changing during
the elbow flexion, we developed the decomposition
algorithm, in which we used not only template
matching method for short period but also we added
the algorithm conditions of SMUAP profile
(Akazawa, 2005).
2 MEATHOS
Figure 1: Schematic overview of the experimental setup.
Schematic overview of the experimental setup is
shown at Fig. 1. The subject was instructed to flex
the elbow joint smoothly to approximately 75 degree
at constant angular velocity (5 degree/s) against the
weight (2.0 kg). The experiments were performed
with one healthy subject who gave informed consent
and the investigation was approved by the local
Ethics Committee (Meiji University of Integrative
Medicine).
The eight-channel surface electrode was used.
The SEMG signal was amplified with the gain 80 dB
255
Akazawa J. and Okuno R..
SMUAP Decomposition Method Considering Estimated Distance from Surface Electrodes to Motor Unit during Voluntary Isovelocity Elbow Flexion.
DOI: 10.5220/0005248102550257
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2015), pages 255-257
ISBN: 978-989-758-069-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
and the band pass filter was set at 43 Hz - 2.8k Hz.
In the algorithm, firstly the measured SEMG was
extracted for 3 seconds by every 1.5 seconds
(Akazawa, 2013).
In this study, the developed algorithm condition
of SMUAP profile was as follows: The SMUAP
channel which outputs the max value won’t change
for less than two channels during the short period of
3.0 sec. We estimated location and shape of MU
(Akazawa 2005). The central coordinate was set at
the center between CH4 and CH5 of surface
electrodes.
3 RESULTS
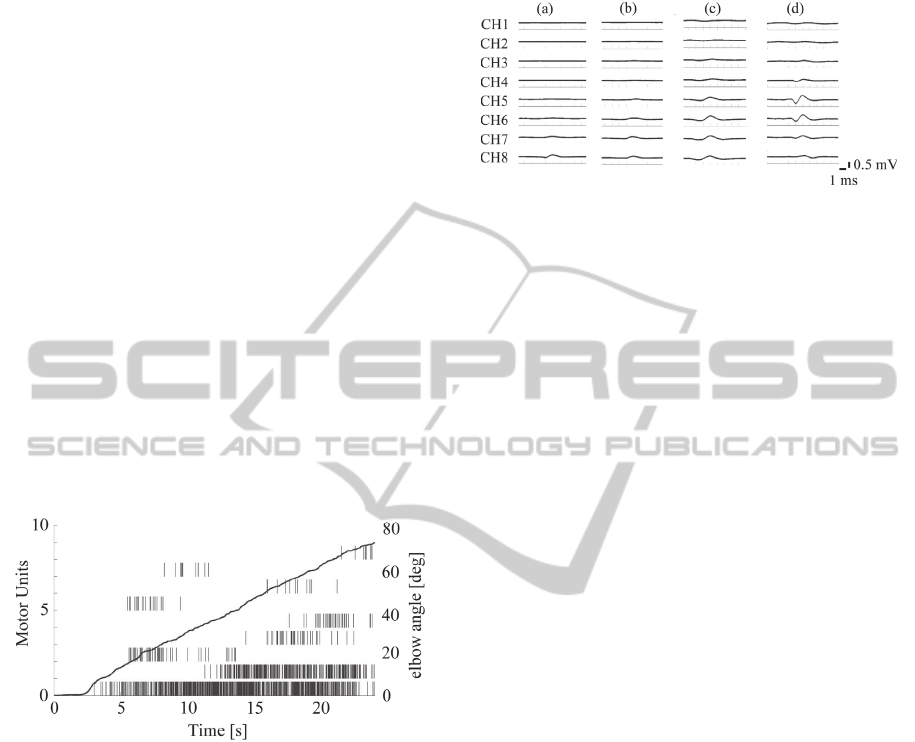
Fig. 2 shows a typical decomposed result of MUAP
Train, and firings of nine motor units, MU1 to MU9
were identified. The results of calculated MU’s
firing rates are in agreement with the generally
accepted behavior of MUs firing rates.
MU1 which was firing for the longest time, so
template of MU1 which was made with calculating
the arithmetic mean (average) of the MU1 signals.
Figure 2: Solid lines: elbow joint angle (average velocity
was approximately 5 degree/s). Identified firings of nine
MUs are shown. Each bar represents one firing and firings
of the same MUs are aligned horizontally. The average
frequency of Motor Unit 1(MU1) was 22.52 Hz, and the
standard deviation was 11.35 Hz. The average frequency
of MU2 was 20.86 Hz, and the standard deviation was
10.90 Hz.
We made four templates of MU1 during time
period of 3.0 sec so that we could confirm the shape
change of SMUAP with changing the distance from
surface electrodes to the motor units. The results are
shown at Fig. 3. We can know that the highest
voltage value of SMUAP was changing from CH8 to
CH5. As increasing the subject’s elbow angle, the
amplitude of SMUAP was increasing gradually.
As shown at Fig. 3 (d), the channel which output
the highest value is CH5. So, the condition that the
SMUAP which was made by MU1 is that the
channel output the highest value is CH4 to 6.
Figure 3: Template of MU1 The short period of Fig, (a)
was 3.5 to 6.5 sec, (b) was 8.0 to 11.0 sec, (c) was 14.0 to
17.0 sec, (d) was 21.5 to 24.5 sec. At fig, (a) the estimated
territory’s radius (R) was 5.0 mm, depth (D) was 2.0 mm,
and horizontal shift (Y) from the middle of the electrodes
was 10.16 mm, fig, (b) R was 5.0 mm, D was 1.9 mm, and
Y was 7.62 mm, fig, (c) R was 5.0 mm, D was 2.20 mm,
and Y was 5.08 mm, fig, (d) R was 0.25 mm, D was 2. 0
mm, and Y was 2.54 mm,
4 CONCLUSIONS
In this study, in order to decompose SMUAP clearly
even in case that the estimated distance from surface
electrodes to motor units changing during elbow
flexion, we developed the decomposition algorithm,
in which we used not only template matching
method for short period but also we added the
algorithm conditions of SMUAP profile. The results
of calculated MU’s firing rates are in agreement
with the generally accepted behavior of MUs firing
rates.
It was shown that the proposed method was
useful for decomposing MUAPs during elbow
flexion.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Numbers 26350678, 24500667.
REFERENCES
Akazawa, J., Okuno, R., 2013. A Method for Quantitative
SEMG Decomposition and MUAP Classification
during Voluntary Isovelocity Elbow Flexion. 35th
Annual International Conference of the IEEE EMBS,
pp.6776-6779, Osaka, Japan.
Akazawa, J., Sato, T., Minato, K., Yoshida, M., 2005.
“Method of estimating location and territory of motor
BIOSIGNALS2015-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
256

units in human first dorsal interosseous muscle with
multi-channel surface electromyograms,” JSMBE, vol.
43(4), pp. 595-604 (in Japanese).
SMUAPDecompositionMethodConsideringEstimatedDistancefromSurfaceElectrodestoMotorUnitduringVoluntary
IsovelocityElbowFlexion
257
