
Analyzing the Transfemoral Amputee Gait using Inertial Sensors
Identifying Gait Parameters for Investigating the Symmetry of Gait - A Pilot Study
Katja Orlowski
1,2
, Harald Loose
1
, Falko Eckardt
2
, J
¨
urgen Edelmann-Nusser
2
and Kerstin Witte
2
1
Department of Computer Science and Media, Brandenburg University of Applied Sciences, Brandenburg, Germany
2
Institute of Sport Science, Otto von Guericke University Magdeburg, Magdeburg, Germany
Keywords:
Gait Analysis, Gait Parameters, Mobile Sensors, Inertial Sensors, Symmetry.
Abstract:
The amputation of a lower limb is a drastic event and it completely changes the life of the person. Current
development of prosthesis is already advanced, but most of the affected persons suffer from changes in the
gait which are visible to the general public. The gait of transfemoral amputees was investigated in the labo-
ratory environment and is called asymmetric due to different facts: shorter step length, smaller velocity and
smaller cadence. The use of mobile inertial sensors can be supportive in the rehabilitation process of these
patients. That is why a pilot study is conducted to evaluate the gait of transfemoral amputees and compare
their gait parameters with those of the healthy subjects. The purpose of the investigation is to identify gait
parameters showing the asymmetric properties of the amputees gait. Eight parameters seem to be distinctive
and descriptive.
1 INTRODUCTION
The gait is an essential movement for getting from one
place to another and therefore influencing the daily
life of people. Consequently, human gait disorders,
such as lower limb amputations, affect the quality of
life. The familiarization with the prosthesis may take
years and strongly depends on the adaptation to the
prosthesis socket. Due to the fact that the human gait
is a complex motion involving a lot of muscles, it is
very important for amputee gait to improve the in-
teraction of the remaining muscles. As known from
the literature the transfemoral (TF) and -tibial (TB)
amputee gait is asymmetric and gait parameters devi-
ate from the normal gait (Murray, 1980; Goujou-Pillet
et al., 2008). The relation between swing and stance
phase differs significantly from the well-known 40-
60-ratio (Perry, 2010); the cadence is much smaller
(p < .001), the stride length much shorter (p < .01)
and the walking speed much slower (p < .001) in
amputees’ gait (Murray, 1980). Goujou-Pillet et al.
(Goujou-Pillet et al., 2008) show that (1) amputees
have larger range of motion (ROM) in the upper body
the slower they walk, (2) the pelvic rotation is specific
and (3) the existing counter-rotation of the pelvic and
the shoulder girdles is less present than in normal gait.
The gait parameters in amputees gait are much more
variable than in normal gait. In the literature there are
various methods named for the assessment of the gait
symmetry. Tura et al. (Tura et al., 2010) investigated
the step and stride regularity using the unbiased au-
tocorrelation coefficient and compares the results of
those coefficients with defined symmetry index (SI).
Petersen et al. (Petersen et al., 2010) use the abso-
lute symmetry index (ASI) and the butterfly symme-
try ratio (BSR) to decide whether the gait symmetry
is significantly improved wearing different technolo-
gies of prosthesis. Ambrosini et al. (Ambrosini et al.,
2011) considered the swing and stance ratio in per-
centage of stride of both legs to assess the impact of
the 2-week training. The named parameters are calcu-
lated from autocorrelation function of the acceleration
or angular velocity measured by inertial sensors. Fur-
thermore, the authors reconstructed the kinematic sig-
nals of the opposite body side by employing the Prin-
cipal Component Analysis (PCA) and achieve good
results. Gouwanda (Gouwanda, 2012) compares the
normalized SI and the normalized cross-correlation
and can show that the gait of participants wearing a
knee or ankle brace is significant asymmetric. Wang
and Low (Wang and Low, 2009) used the autocor-
relation to decide whether the gait is symmetric or
not based on the muscle activity measured during the
gait sequence. Other methods for investigating the
gait symmetry are the clustering (Jiang et al., 2010),
symbolization (Sant’Anna and Wickstr
¨
om, 2010) or
258
Orlowski K., Loose H., Eckardt F., Edelmann-Nusser J. and Witte K..
Analyzing the Transfemoral Amputee Gait using Inertial Sensors - Identifying Gait Parameters for Investigating the Symmetry of Gait - A Pilot Study.
DOI: 10.5220/0005250802580263
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2015), pages 258-263
ISBN: 978-989-758-069-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

classification by neural networks (Wafai et al., 2013;
Wafai et al., 2014). The SI proposed by Robinson et
al. (Robinson et al., 1987) is most often mentioned in
the literature.
To evaluate the gait of a person different methods
are conceivable and generally accepted in the medi-
cal environment. Muro-de-la-Herran et al. (Muro-de-
la-Herran et al., 2014) gave an overview of various
methods. They differentiated between non-wearable
and wearable systems used in the clinical field. They
emphasized the advantages of the mobile systems, but
also referred to possible drawbacks of sensor accu-
racy. Motion capture systems, such as Vicon, were
regarded as gold standard. They mentioned inertial
measurement units (IMU) as sensor types which are
the most popular in the wearable gait analysis (with
almost two-thirds of the total number of wearable sys-
tems). On this account and due to the simplicity of
the usage of IMUs in the motion analysis, our focus
is on the development of automatic methods for the
analysis and evaluation of human gait based on IMU
using those distributed by Shimmer Research / Shim-
mer Sensing
1
.
This paper presents common gait parameters deter-
mined by using two inertial sensors. The identifica-
tion of characteristic features of the amputee gait is
based on the comparison of the gait parameters of TF
amputees with those of the normal gait.
2 METHODS AND MATERIALS
In this section the determination of gait parameters
based on the data measured using two inertial sensors
(acceleration and angular velocity) is presented. Fur-
thermore the conducted experiments are briefly ex-
plained. A short description of the used sensors is
included in the subsection 2.2.
2.1 Gait Parameters
Using two inertial sensors attached to the lower shank
above the ankle, 20 gait parameters (as mean and std)
are automatically determined by various algorithms.
Only two of the three axes of the acceleration (hori-
zontal and vertical) and one of the three axes of the
angular velocity are necessary for the calculation of
the parameters. Most of them are based on the angu-
lar velocity about the sagittal plane (angVel
z
) and the
detection of the gait events - initial and terminal con-
tact (IC and TC). The gait events are characterized by
1
www.shimmersensing.com
two local negative peaks within the signal of the angu-
lar velocity of the sagittal plane. Others are calculated
by integrating the acceleration or angular velocity.
Further information about the used algorithms can
be found in former publications (Orlowski and Loose,
2013; Orlowski and Loose, 2014).
Features describing the gait symmetry are the step
length and the stance ratio (G
¨
otz-Neumann, 2011).
The first feature is not considered in this investigation.
The second gait symmetry feature is included and can
be analyzed by considering the parameter stance (St)
for both sides (left, right). For each of the determined
parameters the symmetry index based on Robinson et
al. (Robinson et al., 1987) is calculated using the fol-
lowing equation 1:
SI[%] =
x
right
− x
le f t
1
2
∗ (x
right
+ x
le f t
)
∗ 100 (1)
with x
right
and x
le f t
representing a gait parameter mea-
sured for the left and right side.
The gait is assumed symmetric if SI of one or
more parameters are close to zero. Consequently, the
greater the value deviates from zero in both directions
(positive and negative), the more asymmetric is the
gait. Due to the fact that the normal gait is not com-
pletely symmetric, it has to be defined which devia-
tion is acceptable to call the gait as symmetric.
Based on the information given in the literature com-
bined with the conducted evaluation of the gait pa-
rameters of all subjects (healthy and amputees) eight
gait parameters are identified as distinctive and de-
scriptive for the amputees gait:
• midswing height (MH): mean of the amplitude
during the midswing (see figure 1)
• height difference between TC and IC (HD): mean
difference of the amplitudes of the IC and TC (see
figure 1)
• swing (Sw): percentage of swing (TC-IC) at the
gait cycle (IC-IC)
• stance (St): percentage of stance (IC-TC) at the
gait cycle (IC-IC)
• single limb support (SLS): percentage of single
limb support at the gait cycle (IC-IC)
• put-on-angle (PA): maximum angle at the IC
• cadence (C): steps per minute
• velocity (V): distance per minute
2.2 Experiments
The gait of six healthy subjects (see table 1) and two
patients (see table 2) was measured with two inertial
AnalyzingtheTransfemoralAmputeeGaitusingInertialSensors-IdentifyingGaitParametersforInvestigatingthe
SymmetryofGait-APilotStudy
259
sensor capturing the acceleration and angular veloc-
ity. The sensors were each attached laterally on the
lower shank above the ankle. The ”normal” gait of the
subjects (healthy adults) and patients (TF amputees)
were captured while walking (straight forward) be-
tween 10 and 20 meters at normal speed.
9-DoF sensors (Shimmer2r) were used, without
registering the magnetometer, though it is not in-
cluded in the experiments. The acceleration and angu-
lar velocity were measured with a frame rate of 102.4
Hz and a sensitivity of 6g for the accelerometer and
500 deg/s for the gyroscope.
The capturing was done using the software Multi-
Shimmer-Sync provided by the manufacturer and an
capturing software implemented in MATLAB
R
us-
ing the interface given by Shimmer Research. The
analysis and evaluation was exclusively done in
MATLAB
R
.
In the preliminary study two patients (TF am-
putees) participated in our experiments. As refer-
ence values the data (parameters and especially the
SI) from healthy adults was used. As the table 1 show
385 gait cycles of 33 gait sequences were included to
measure the reference values.
Table 1: Anthropometric data and information of the gait
cycles (GC) of the six healthy subjects. For each subject
four to seven gait sequences (GS) are registered.
Subject
No.
1 2 3 4 5 6
age 29 37 42 32 25 25
BMI 27 25 23 22 21 21
sex m m f f m f
GS 4 5 6 7 5 6
GC 37 45 85 83 45 90
Table 2: Anthropometric data and information of the gait
cycles of the two patients.
Patient No. 1 2
age 30 32
BMI 25 21
sex m m
GS 15 12
GC 93 72
prosthesis left right
3 RESULTS
After measuring the gait of the two patients, the stored
data of the accelerometer and gyroscope was analyzed
with the existing algorithms using the in-house devel-
opment. The gait cycle of TF amputees gait have the
characteristic events IC and TC. Therefore, the fur-
ther analysis could be conducted without adjustment
on the algorithms. The gait parameters were calcu-
lated for all datasets. Furthermore, all datasets of the
healthy subjects were analyzed. Consequently, for
each subject and each measurement a table including
the parameters for the left and right leg was created.
The symmetry was determined for each parameter us-
ing the SI value. Furthermore the mean values of the
parameters (left and right side) and the SI values are
calculated for all available gait sequences for each
subject (two patients, six healthy) and for the group
of healthy subjects and both amputees.
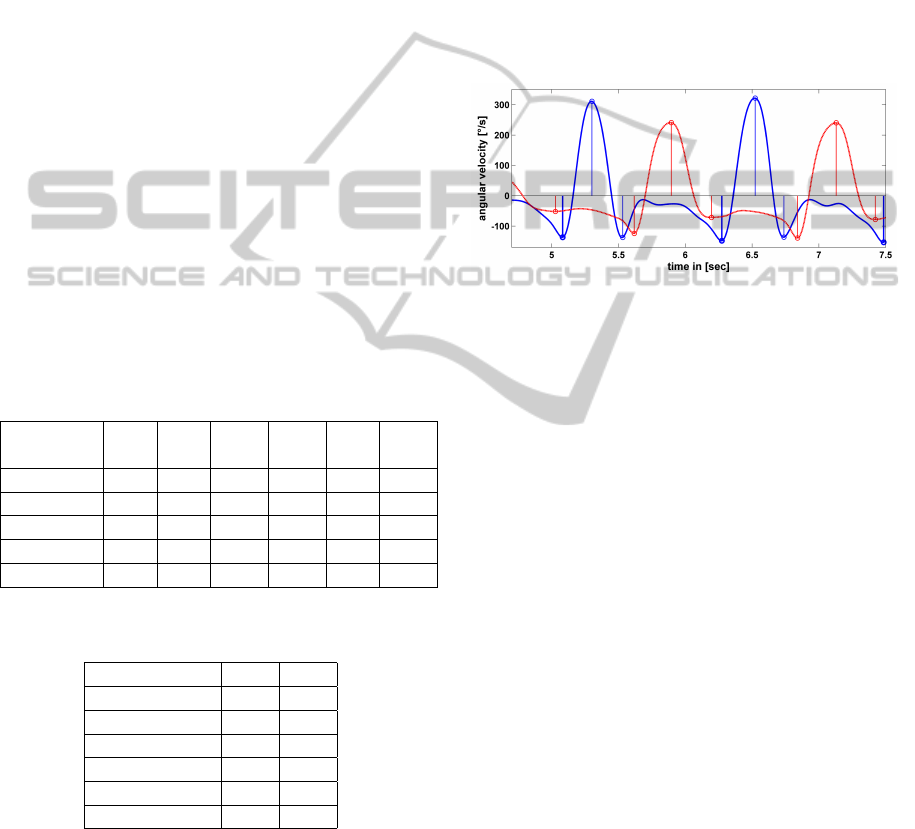
Figure 1: The angular velocity in the sagittal plane of the
sound side (blue solid) and the amputated side (red dotted)
with marked TCs (terminal contacts), midswings and ICs
(initial contacts).
The tables 3, 4 and 5 show the parameters identi-
fied as descriptive and distinctive. Table 3 represents
the gait parameters of a normal gait. The values in ta-
ble 4 belong to a patient one with a TF prosthesis on
the left side based on 15 gait sequences. The values
in table 5 belong to a patient two with a TF prosthe-
sis on the right side based on 12 gait sequences. The
SIs in the tables represent the mean value of all gait
sequences using the absolute value of each SI of the
33 gait sequences due to the fact that the measured
subjects can have both a dominant right or left leg.
The calculation of the mean based on the raw SI val-
ues (positives and negatives), would falsify the results
because a positive value would compensate a nega-
tive one. In contrast to the SI which is unaffected by
the dominance of one leg, this is not applied to the
gait parameters presented in table 3. Consequently,
the gait parameters of the healthy subjects can not be
directly compared with those of the patients.
The main difference between the normal and
amputees gait is the relation of swing and stance
phase (Sw and St). The same applies to the ratio of
single limb support and stride (SLS). These three
parameters show a symmetric value for the normal
gait (SI ranges from 2.16 to 3.66), while the amputees
gait has larger deviations from zeros (SI ranges from
17.39 to 20.89 or 6.16 to 7.03). Furthermore the
velocity and the cadence differs clearly. The figure 1
BIOSIGNALS2015-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
260

shows the angular velocity presenting the motion of
the lower shank in the sagittal plane. The gait events
midswing, IC and TC are marked for both sides
(blue: sound and red: amputated). Clearly visible
is the difference of the maximum amplitude during
the swing phase of the amputated and sound side.
Furthermore the TCs of the amputated side are much
smaller than those of the sound side.
Table 3: Selected gait parameters of the normal gait given
for the left and right side as well as the SI as mean values
(standard deviation) of 33 gait sequences of the six healthy
subjects. For calculating the mean SI of all healthy sub-
jects the absolute value of each SI is used. (MH - midswing
height, HD - height difference of TC and IC, Sw - swing, St
- stance, SLS - single limb support, PA - put-on-angle, C -
cadence, V - velocity).
Param unit left right SI [%]
MH
◦
/s 305.47
(24.48)
317.79
(20.94)
9.77
(5.48)
HD
◦
/s 21.24
(11.26)
16.11
(8.24)
57.23
(44.80)
Sw % 47.4
(1.01)
48.3
(1.28)
2.33
(1.53)
St % 52.6
(1.04)
51.7
(1.30)
2.16
(1.45)
SLS % 48.5
(2.26)
48.0
(1.22)
3.33
(3.95)
PA
◦
12.03
(0.62)
12.88
(1.53)
11.10
(8.56)
C
steps
min
116.30
(3.23)
116.30
(3.23)
—
V
m
min
79.02
(5.56)
79.02
(5.56)
—
4 DISCUSSION
While the normal gait has a almost 50-50 ratio for
both body sides in our setting, the amputees gait has
this ratio on the affected side. The stance ratio on
the unaffected side partly shows a distribution much
closer to 40-60 %. In contrast to the common relation
of swing and stance phase of 40-60 % (Perry, 2010),
evaluating the gait of healthy subject we received al-
most a 50-50 % ratio. The determination of start and
end point of the swing and stance phase are two rea-
sons for that deviation. The investigation of the two
patients show that TF amputees have a larger stance
phase on the sound leg than on the amputated leg, as
given in the literature (Murray, 1980).
As described by G
¨
otz-Neumann (G
¨
otz-Neumann,
2011) the mean stride length, consequently the ve-
locity differs significantly between the two groups of
Table 4: Selected gait parameters of the amputees gait (pa-
tient one) given for the amputated and sound side as well as
the SI as mean values (standard deviation) of 15 registered
gait sequences.
Param unit ampu-
tated
sound SI [%]
MH
◦
/s 278.91
(3.50)
257.32
(4.56)
8.06
(1.51)
HD
◦
/s 122.06
(4.19)
43.36
(6.96)
95.56
(13.06)
Sw % 52.5
(1.33)
43.1
(0.67)
18.68
(3.39)
St % 47.5
(1.07)
56.9
(0.72)
17.39
(2.69)
SLS % 42.1
(0.75)
51.9
(1.18)
20.89
(3.21)
PA
◦
12.83
(0.31)
8.16
(0.28)
44.49
(3.21)
C
steps
min
104.02
(1.44)
104.02
(1.44)
—
V
m
min
62.75
(4.53)
62.75
(4.53)
—
Table 5: Selected gait parameters of the amputees gait (pa-
tient two) given for the amputated and sound side as well as
the SI as mean values (standard deviation) of 12 registered
gait sequences.
Param unit sound amputa-
ted
SI [%]
MH
◦
/s 333.18
(8.44)
283.21
(9.38)
16.23
(1.42)
HD
◦
/s 110.54
(4.49)
61.22
(8.48)
58.01
(11.66)
Sw % 45.5
(0.61)
48.4
(1.28)
6.16
(3.37)
St % 54.5
(0.52)
51.6
(1.18)
7.03
(2.84)
SLS % 48.5
(1.35)
45.5
(1.39)
6.93
(4.75)
PA
◦
13.23
(0.47)
14.46
(0.96)
10.05
(5.47)
C
steps
min
109.56
(3.23)
109.56
(3.23)
—
V
m
min
62.84
(3.03)
62.84
(3.03)
—
subjects. The normal gait (normal speed) achieves a
velocity of about 79m/min, the amputees gait reaches
a velocity of about 63m/min. Due to the fact that the
velocity is a parameter which is not calculated sepa-
rately for each side, no symmetry value is derived.
The gait parameter put-on-angle is distinctive: in
normal gait the angle is always larger then ten degrees
AnalyzingtheTransfemoralAmputeeGaitusingInertialSensors-IdentifyingGaitParametersforInvestigatingthe
SymmetryofGait-APilotStudy
261

and depends on the walking velocity, within the am-
putees gait the angles never reaches ten degrees for
sound side. The put-on-angle of this subject is seen
as asymmetric due to its SI value of 44.49.
Further parameters which refer to an asymmetry
in the amputees gait are MH and HD. Both are partly
characteristic and can even be detected through vi-
sual inspection of the gyroscope data. Within the gait
cycle of the normal gait the difference of the ampli-
tudes at the events IC and TC are almost the same for
both legs (HD). Considering the amputees gait there is
an imbalance of that difference regarding the affected
and the unaffected body side (see figure 1). This is re-
flected by the calculated SI value of patients one (nor-
mal 57.23 and amputee one 95.56 and two 58.01).
Regarding the parameter MH the deviation is much
smaller, but it is recognizable in the SI value for one
of the patients (normal 11.10 and amputee one 44.49
and two 10.05). Considering the results of the exper-
iments, there are three to five gait parameters for the
motion of the foot (lower shank) which show a differ-
ence and therefore descriptive for the assessment of
the symmetry. As the tables 4 and 5 show that the gait
of amputees is not comparable due to different facts:
duration of wearing prosthesis, length of the stump,
type of the knee joint and others.
5 CONCLUSIONS AND
OUTLOOK
The determination of the gait parameters based on the
algorithms is equal for both, the normal and the am-
putees gait. The symmetry of the gait is calculated for
each parameter using the symmetry index of Robin-
son et al. (Robinson et al., 1987). A group of eight
is chosen from the 20 parameters. The parameters
HD, Sw, and St (SLS) characterize the asymmetric gait
of TF amputees in comparison to the normal bipedal
gait. The gait parameters MH, PA, and V are useful
for the identification of an amputees gait. These seem
to be descriptive and distinctive in terms of character-
izing the gait of healthy adults and those affected by
amputation as well as showing the existence of sym-
metry. Whether these parameter are correct will be
evaluated in the following study with TF amputees
where the gait analysis based on inertial sensors is in-
tended to use as pre- and posttest.
In addition to the changed swing-stance-relation
an oscillating motion of the upper body is characteris-
tic for the amputees in comparison to the normal gait
(Goujou-Pillet et al., 2008). These motion can not
be registered with two sensors attached to the lower
shank, though. Consequently, our gait analysis has
to be expanded to the upper body by using additional
sensors. Furthermore it is necessary for the evaluation
in the pre- and posttest of the following study with TF
amputees to have more measurements of normal gait.
REFERENCES
Ambrosini, E., Ferrante, S., Pedrocchi, A., Ferrigno, G.,
Guanziroli, E., and Molteni, F. (2011). A novel
biofeedback cycling training to improve gait symme-
try in stroke patients: A case series study. IEEE
International Conference on Rehabilitation Robotics
(ICORR), pages 1–6.
G
¨
otz-Neumann, K. (3. Auflage, 2011). Gehen verstehen
- Ganganalyse in der Physiotherapie. Georg Thiem
Verlag KG.
Goujou-Pillet, H., Sapin, E., Fod, P., and Lavaste, F. (2008).
Three-dimensional motion of trunk and pelvis during
transfemoral amputee gait. Arch Phys Med Rehabil,
89:87–94.
Gouwanda, D. (17-19 December 2012). Further valida-
tion of normal symmetry index and normal cross-
correlation in identifying gait asymmetry on restricted
knee and ankle movement. IEEE Conference on
Biomedical Engineering and Sciences, pages 423–
427.
Jiang, S., Zhang, B., Xu, W., and Wei, D. (2010). Gait
symmetry analysis based on affinity propagation clus-
tering. IEEE 10th International Conference on Com-
puter and Information Technology (CIT), pages 1673–
1678.
Muro-de-la-Herran, A., Garcia-Zapirain, B., and Mendez-
Zorrilla, A. (2014). Gait analysis methods: An
overview of wearable and non-wearable systems,
highlighting clinical applications. Sensors, 14:3362–
3394.
Murray, M. P. (1980). Gait patterns of above-knee amputees
using constant -friction knee components. Bulletin of
Prothetics Reserach, 17 (No. 2):35–45.
Orlowski, K. and Loose, H. (2013). Evaluation of kinect
and shimmer sensors for detection of gait parame-
ters. Proceedings of BIOSIGNALS 2013, Int. Confer-
ence on Bio-Inspired Systems and Signal Processing,
Barcelona, Spain, 11-14 Feb. 2013, pages 157–162.
Orlowski, K. and Loose, H. (2014). Simple algorithms for
the determination or the walking distance based on
the acceleration sensor. Proceedings of BIOSIGNALS
2014, Int. Conference on Bio-Inspired Systems and
Signal Processing, Angers, France, 3-6 March 2014,
pages 264–269.
Perry, J. (2010). Gait Analysis - Normal and Pathological
Function. Slack Inc.
Petersen, A. O., Comins, J., and Alkjr, T. (03/2010). As-
sessment of gait symmetry in transfemoral amputees
using c-leg compared with 3r60 prosthetic knees. JPO
Journal of Prosthetics and Orthotics, 22 (2):106–112.
Robinson, R., Herzog, W., and Nigg, B. (1987). Use of
force platform variables to quantify the effects of chi-
BIOSIGNALS2015-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
262

ropractic manipulation on gait symmetry. Journal
of Manipulative and Physiological Therapeutics, 10
(4):172–176.
Sant’Anna, A. P. and Wickstr
¨
om, N. (2010). A symbol-
based approach to gait analysis from acceleration sig-
nals: Identification and detection of gait events and a
new measure of gait symmetry. IEEE Transactions
on Information Technology in Biomedicine, 14 (No.
5):1180–1187.
Tura, A., Raggi, M., Rocchi, L., Cutti, A. G., and Chiari, L.
(2010). Gait symmetry and regularity in transfemoral
amputees assessed by trunk acceleration. Journal of
NeuroEngineering and Rehabilitation, 7:4.
Wafai, L., Zayegh, A., Begg, R., and Woulfe, J. (2013).
Asymmetry detection during pathological gait using a
plantar pressure sensing system. 7th IEEE Conference
and Exhibition (GCC), pages 182–187.
Wafai, L., Zayegh, A., Woulfe, J., and Begg, R. (2014).
Automated classification of plantar pressure asymme-
try during pathological gait using artificial neural net-
work. Middle East Conference on Biomedical Engi-
neering (MECBME), pages 220–223.
Wang, P. and Low, K. (2009). Qualitative evaluations of
gait rehabilitation via emg muscle activation pattern:
Repetition, symmetry, and smoothness. IEEE Interna-
tional Conference on Robotics and Biomimetics (RO-
BIO), pages 215–220.
AnalyzingtheTransfemoralAmputeeGaitusingInertialSensors-IdentifyingGaitParametersforInvestigatingthe
SymmetryofGait-APilotStudy
263
