
Grouping of Isolated Non-directional Cues with Straight Offset Polygons
Toshiro Kubota
Mathematical Sciences, Susquehanna University, Selinsgrove PA, U.S.A.
Keywords:
Dot Patterns, Shape Extraction, Clustering.
Abstract:
When the boundary of a familiar object is shown by a series of isolated dots, humans can often recognize the
object with ease. This ability can be sustained with addition of distracting dots around the object. However,
such capability has not been reproduced algorithmically on computers. In this paper, we will introduce a new
algorithm that groups a set of dots into multiple overlapping subsets. It first connects the dots into a spanning
tree using the proximity cue. It then applies the straight polygon transformation to an initial polygon derived
from the spanning tree. The straight polygon divides the space into polygons recursively and each polygon
can be viewed as grouping of a subset of the dots. The number of polygons generated is O(n). We used both
natural and synthetic images to test the performance of the algorithm. The results are encouraging.
1 INTRODUCTION
Consider a picture shown in Figure 1(a). We can eas-
ily recognize a dolphin in the picture, delineated by a
series of isolated dots. Reproducing this capability on
a computer is not difficult for this simple case. The
task quickly becomes difficult when distracting noisy
dots are added to the picture as shown in Figure 1(b)
and (c). We can still recognize the dolphin in (b) and
possibly (c). However, most clustering algorithms are
not capable of dealing with them as the background
noise significantly overlaps with the shape. Most per-
ceptual organization algorithms also have difficulties
in dealing with such data, as dots lack any orienta-
tion and directional information needed for many al-
gorithms(Elder and Zucker, 1996; Mahamud et al.,
2003; Wang et al., 2005).
Patterns comprised of isolated dots (often called
dot patterns) have played important roles in various
psycho-visual studies. The studies suggest bottom-
up grouping and shape extraction capability in our vi-
sual system (Kubovy and Wagemans, 1995; Greene,
2008). Although they are not typical patterns we en-
counter in every day experience, they carry raw in-
formation that is essential to our visual processing.
Thus, it is important to understand how such patterns
can be processed algorithmically and how an under-
lying salient shape can be extracted. Various attempts
have been made in the past to divide a dot pattern
into coherent sets (clustering problem) (Zahn, 1971;
Rosenberg and Langridge, 1973; Ahuja, 1982; Tous-
saint, 1980) or delineate the boundary enclosing the
pattern (external shape problem)(Edelsbrunner et al.,
1983; O’Rourke et al., 1987; Chaudhuri et al., 1997;
Melkemi and Djebali, 2000). However, the past ap-
proaches were unable to deal with overlapping dis-
tracters as seen in Figure 1(b), highly dependent on
critical parameters(Ahuja and Tuceryan, 1989; Edels-
brunner et al., 1983), and limited to a single interpre-
tation of data(Rosenberg and Langridge, 1973).
In this paper, we propose an algorithm that de-
rives a collection of polygonal regions from a dot pat-
tern in a parameter free manner. It applies minimum
spanning tree on the pattern followedby straight poly-
gon transformation of (Aichholzer et al., 1995). See
Figure 2 for an illustration of the idea. Figure 2(a)
is a simple example of a point pattern. Figure 2(b)
shows a minimum spanning tree derived from (a).As
in (Zahn, 1971), the Euclidean distance between a
pair of dots is used as the weight for the spanning tree.
Figure 2(c) shows a straight polygon representation
derived from (b). As the polygon deforms outward,
a vertex of the polygon touches another part of the
polygon. At the time, a new polygon is created by
an enclosure of the outward growing polygon. This
newly created polygon grows inward as the deforma-
tion is contained within the enclosure. Three inward
growing polygons are created in the example, which
are shown in thick solid lines. An inward growing
polygon can further divided into multiple polygons if
a concave vertex touches another side of the polygon
before it vanishes. As we outline in more detail later
in this paper, we can trace back vertices of a new poly-
gon back to vertices of the spanning tree. The result-
341
Kubota T..
Grouping of Isolated Non-directional Cues with Straight Offset Polygons.
DOI: 10.5220/0005257003410348
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 341-348
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

ing set of vertices in the spanning tree forms another
polygon using the original point set and provides a
grouping instance. Therefore, for each inward grow-
ing polygon, we can associate a grouping instance of
the point set.
The outward growing polygon keeps growing and
encloses these inward growing polygons. We can also
trace vertices of the outward growing polygon back
to the spanning tree. The trace may not form a poly-
gon as it can visit the same edge more than once (in
opposite directions). For example, for the polygon
pointed by an arrow in Figure 2(c), the trace provides
two polygons joined by an edge that were traversed
twice in both directions. One of the two polygons
encloses the two rectangles in the upper part and the
other encloses the polygon with five vertices in the
lower part. Thus, a trace of outward growing polygon
can potentially provides multiple grouping instances
where each grouping can possibly combine multiple
inward growing polygons.
In summary, the straight polygon transformation
applied to a minimum spanning tree of a point pat-
tern can provide multiple grouping hypotheses in a
simple deterministic manner without any parameters.
Our experiments presented in this paper show that
the approach offers grouping performance that is ro-
bust against noise and grouping hypotheses that are
agreeable to our perception. The approach complies
with multiple interpretations and multiple solutions
characteristics advocated in (Engbers and Smeulders,
2003) for a good grouping algorithm.
The rest of the paper is organized as follows. Sec-
tion 2 describes the straight polygon deformation and
straight skeleton representation. Section 3 formalize
our grouping approach as outlined above. Section 4
provides empirical evaluation results. Section 5 dis-
cusses strength and limitation of the current approach
and provides future directions. Section 6 concludes
the paper with a brief summary.
2 STRAIGHT OFFSET
POLYGONS AND STRAIGHT
AXES
In this section, we describe straight offset polygon
and straight skeleton representations as introduced in
(Aichholzer et al., 1995) and extended in (Aichholzer
and Aurenhammer, 1996). Let P be a polygon with
n vertices. The process of forming the straight off-
set polygon representation is to shrink the polygon
by moving inward each side of the polygon by self-
parallel motion. Such motion can be generated by
(a) (b) (c)
Figure 1: Dot patterns.
(a) dots (b) tree (c) Polygons
Figure 2: An example of straight polygon representation.
moving each vertex to the direction of the angle bi-
sector with the velocity given by
v
i
∝ 1/ sin(θ
i
/2) (1)
where v
i
is the velocity of the ith vertex and θ
i
is the
angle of the polygon at the ith vertex. Two events can
change the shape and topology of the polygon: edge
event and split event. An edge event occurs when two
adjacent vertices collide and changes the shape of the
polygon. A split event occurs when a concave (or re-
flexive) vertex collide with a side of the polygon and
split the polygon into two.
See Figure 3 for an illustration of these events. It
shows a polygon with 8 vertices represented by small
hollow circles. The polygon undergoes shrinkage by
self-parallel motion, and snapshots of the shrinkage
are shown with dashed lines. First, a split event takes
place when the vertex pointed by an arrow collides
with a side of the polygon. The event splits the poly-
gon into two polygons: one with 5 vertices (left poly-
gon) and the other with 4 vertices (right polygon).
These new polygons undergo the same shrinkage pro-
cess independently. Each polygon experiences a num-
ber of edge events where two adjacent vertices col-
lide. There are 3 edge events in both left and right
polygons. The shrinkage stops when the polygon van-
ishes to a line or a point. In Figure 3, polygons at split
or edge events are shown in solid lines with the exact
locations of events shown with filled circles.
By tracing vertices of offset polygons, we obtain
a tree-structure, which is called straight skeletons of
the polygon. The skeletons are shown in thick solid
lines in Figure 3. Without any degenerate cases where
more than two points collide simultaneously or two
parallel sides collide, there are n−2 non-leaf nodes in
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
342

the straight skeletons and 2n − 3 arcs. The skeletons
also divide the original polygon into n faces.
Instead of shrinkage, we can consider expansion
of the polygon by self-parallel motion of each side.
This can be achieved by simply reversing the motion
of each vertex. The polygon deforms and its shape
and topology change as edge and split events occur
as in the shrinkage case. Some vertices do not vanish
and approach infinity.
As the name suggests, the straight skeletons are
comprised of linear line segments. In contrast, the
medial axes are comprised of linear and quadratic
line segments in general(Blum, 1967). Thus, the data
structure for the straight skeletons is simpler than that
of the medial axes. However, the straight skeletons
lack a dual interpretation of Voronoi diagram as in
the medial axes. As a result, we need to simulate the
shrinkage (or expansion) process to obtain the straight
skeletons. The run-time of a brute force implementa-
tion of the simulation is in O(n
3
) where n is the num-
ber of vertices, but in practice, it runs in O(n
2
). The
medial axes can be constructed in O(nlogn) (Lee,
1982). The number of events is upper bounded by
n − 2. At each event, at most two polygons are cre-
ated. Thus, the number of polygons is upper bounded
by 2n − 4. Algorithm 1 shows procedures that im-
plement the construction of the straight offset poly-
gons. The initialization (Lines 2-4) takes O(n
2
) since
the for-loop runs over vertices, and for each vertex,
we need to examine other vertices and sides for the
earliest incidence of events. The recursion (apply)
is called for each event, which is O(n). Handling
an event (Lines 11-17) takes a constant time. Some
events in the queue need to be updated if the current
event removed the participating vertex or side for the
events (Lines 18-21). The number of events that need
to be updated is O(n) but typically is dependent on
local shape and thus is O(1). For each event, it takes
O(n) to update. Therefore, the apply procedure runs
in O(n
2
) for the worst case but O(n) for typical cases.
Overall, the algorithm runs in O(n
3
) for the worst case
but O(n
2
) for typical cases. In this paper, we call
straight offset polygons and straight skeletons com-
bined straight polygon representation and the pro-
cess of computing the straight polygon representation
straight polygon transformation.
Figure 3: An example of straight offset polygons.
1 Procedure
OffsetPolygons(
P
)
Input: P: initial polygon
Output: G: a set of offset polygons
2 foreach
vertex
q in P do
3 find the next event for q
4 end
5 G =
apply(
P
)
6 return G
7 Procedure
apply(
P
)
Input: P: a polygon
Output: G: a set of polygons
8 G← {P}
9 if |P| ≥ 3 then
10 extract the next event from P
11 if edge event then
12 L = polygon after collision
13 R=
/
0
14 end
15 else if split event then
16 L,R = polygons after split
17 end
18 Q = a set of vertices affected by the
event
19 foreach q in Q do
20 update the next event for q
21 end
22 G ← G+
apply(
L
)
+
apply(
R
)
23 end
24 return G
Algorithm 1: Procedure for straight polygon transfor-
mation.
3 ALGORITHM
This section details an algorithm of computing a
collection of grouping of dots from a dot pattern.
Algorithm 2 shows an outline of the algorithm. First
a minimum spanning tree is constructed from the
input dot pattern (Line 1). The tree is traced to
construct a circularly linked list of polygon vertices
with the velocity given by (1) (Line 2). Figure 4
shows examples of the trace. When there is no branch
in the spanning tree (a), the trace gives a polygon
of 2n vertices where n is the number of nodes in
the spanning tree. When one tree node is adjacent
to every other node in the tree (b), the trace gives a
polygon of 3n − 3 vertices. The number of polygon
vertices are bounded by these two extreme cases. The
polygon does not need any particular width as long
as all vertices are prepared with the velocity defined
by (1). From the initial polygon, the straight polygon
transformation is applied with Algorithm 1 (Line
GroupingofIsolatedNon-directionalCueswithStraightOffsetPolygons
343
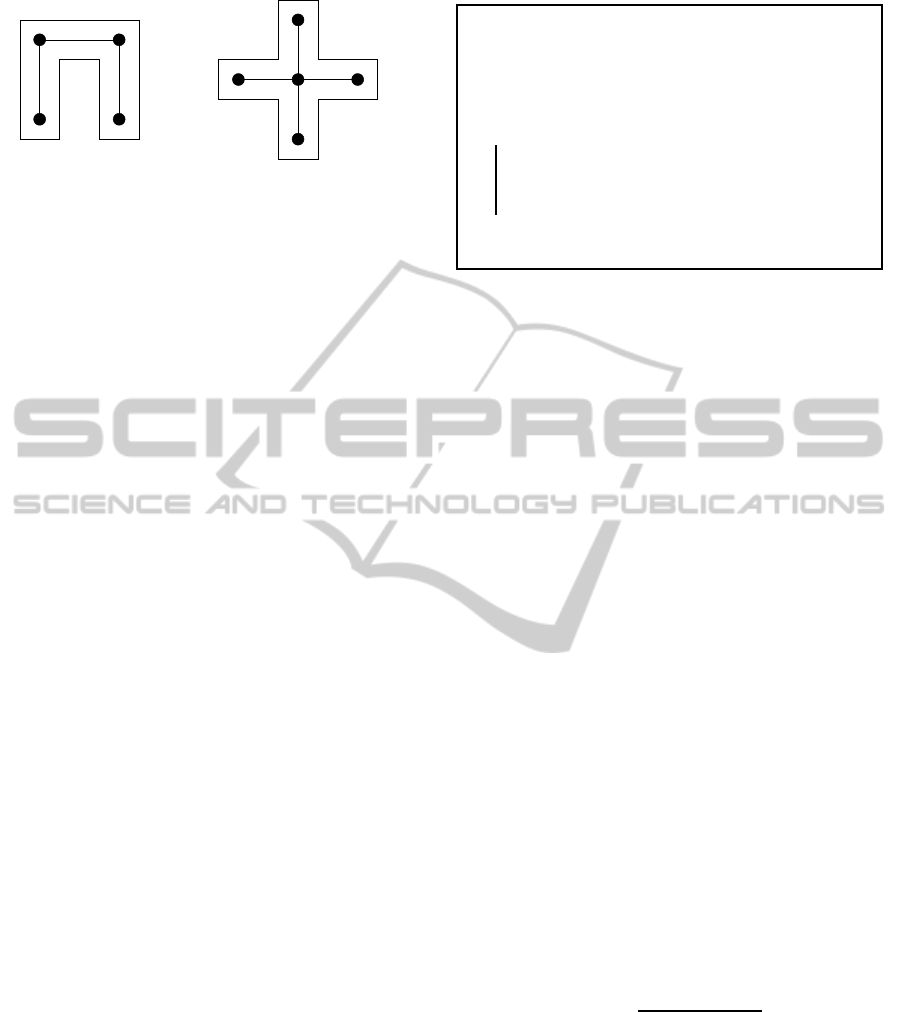
(a) (b)
Figure 4: Two examples of a spanning tree and an initial
polygon.
3). For each moving vertex, additional attributes are
added as described next.
From each offset polygon, we want to trace back
to a subset of vertices in the initial polygon and in turn
to the nodes in the spanning tree. For the purpose,
each vertex maintains two links (π
a
and π
b
). For ver-
tices in the initial polygon, π
a
= π
b
= nil. Upon an
edge event, two vertices collide and a new vertex is
formed. π
a
and π
b
of the new vertex are set to the
colliding vertices in such a way that π
b
is the succes-
sor of π
a
in the circular linked list. By preserving this
ordering consistently, the set of vertices after tracing
back forms a polygon. Upon a split event, a vertex
collides with a side of the polygon and two new ver-
tices are formed. For both of the new vertices, π
a
is
set to the colliding vertex and π
b
is set to nil. Using
π
a
and π
b
, we can associate the sequence of vertices
in an offset polygon back to a sequence of vertices in
the initial polygon (Line 5).
As illustrated in Section 1 with Figure 2, a se-
quence of vertices obtained in Line 5 may not form
a polygon. Thus, we trace the sequence and decom-
pose it into a set of subsequences where each form a
separate polygon (Line 6).
Let m ∈ [2n,3n − 3] be the number of vertices in
the initial polygon. Note that offset polygons by suc-
cessive edge events trace back to the same set of ver-
tices in the initial polygon. Thus, they do not pro-
vide any new grouping hypotheses. There can be at
most m/2 split events. This case occurs if polygons
of 3 vertices are split successively without any edge
events. Each provides a distinct grouping hypothe-
sis. These split polygons can be aggregated by the
outgrowing polygon. The aggregation is done hierar-
chically. Thus, there can be at most m/2 aggregation
instances. Therefore, there can be at most m grouping
hypotheses in total.
Input: Z: a set of isolated dots
Output: H: a set of polygons
1 T ← minimum spanning tree of Z
2 P ← a thin polygon tracing around T
3 G ← OffsetPolygons(P)
4 foreach g in G do
5 h = trace g to nodes in T
6 {J} ← polygonal regions in h
7 add each element of {J} to H
8 end
9 return H
Algorithm 2: Procedure for dot grouping.
4 EXPERIMENTS
4.1 Experiment 1
Our first experiment is to apply Algorithm 2 to some
point patterns derived from real images. To generate
a point pattern of an image, we first apply Canny’s
edge detector to the image. We then sub-sample edge
pixels in each 4 × 4 block by placing a point at the
centroid (rounded to the pixel) of edge pixels in the
block. The subsampling reduces the proximity cue
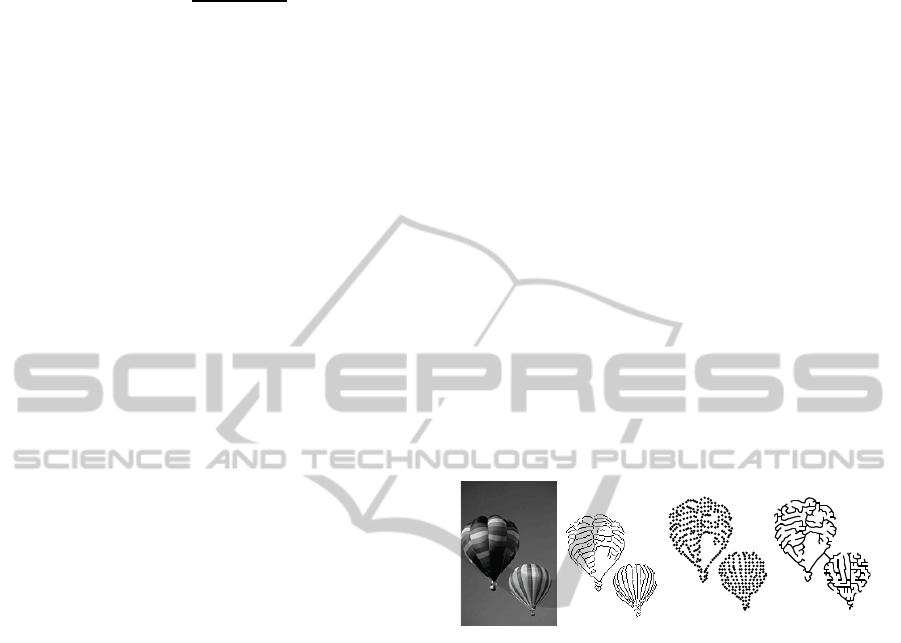
and makes the grouping process more difficult. Fig-
ure 5 shows an example of these pre-processing steps
where (a) is a gray scale image, (b) is a Canny edge
image, (c) is a dot pattern, and (d) is a minimum span-
ning tree derived from (c).
The grouping algorithm produces a number of
polygons comparable to the number of points in the
dot pattern. For example, there are 403 points in Fig-
ure 5(c) and there are 486 polygons as the result of
the grouping algorithm. Just to present a few poly-
gons that are deemed representative, we use the fol-
lowing procedure to consolidate similar polygons and
rank them.
For each polygon, the following convexity mea-
sure is computed.
c(P) =
area(P)
∑
i
kp
i
− p
i+1
k
2
(2)
where P = {p
1
, p
2
,··· , p
K
} is a polygon with K ver-
tices, area(P) is the area of the polygon, and the
summation in the denominator runs in modulo-K so
that it computes the sum of polygon sides squared.
The measure is unit-less and prefers a polygon whose
shape is near circular and whose vertices are evenly
distributed around the shape. We then perform con-
nected component analysis on the set of polygons by
using the following overlap measure as a similarity
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
344
measure.
ξ(P,Q) =
area(P∩ Q)
area(P∪ Q)
(3)
where P and Q are two polygons being compared.
ξ(P,Q) = 0 if there is no overlap and 1 if they are
identical. P and Q are merged into the same compo-
nent if ξ(P,Q) ≥ 0.5. For each connected component,
a polygon with the highest convexity measure is re-
tained as a representative of the component.
Figure 6 shows results of the above consolidation
procedure. In each row, from left to right, the first
two images are the input natural image and the Canny
edge image, respectively. The next six images show
six representativepolygons with the highest convexity
measures. Polygons are drawn in thick black lines on
top of the dot patterns in gray.
Note that this experiment is not to provide a full
scale object extraction algorithm, which will be left
for future research. But it is to summarize polygons
derived from the algorithm in a concise and informa-
tive way. The selection procedure described above is
crude and requires further investigation.
4.2 Experiment 2
Our second experiment is to apply the grouping al-
gorithm to point patterns comprised of a shape and
superimposed noise, and examine if the representa-
tion recovers a polygon that closely matches with the
underlying shape. Thus, the experiment investigate
the robustness of the representation against random
dots. Figure 1 shows instances of such point patterns.
There are 20 shapes of animals and common objects.
Each shape was generated by tracing the boundary of
its binary image, keeping every 10th point while dis-
carding the others, and scaling them so that the shape
stretched around 200 ≤ x ≤ 800 and 200 ≤ y ≤ 800
in the pixel coordinate. For each shape, we imposed
three levels of noise, which were generated in the fol-
lowing way. The average spacing between adjacent
points in the shape was computed. Denote the av-
erage µ. Then the area between 200 ≤ x ≤ 800 and
200 ≤ y ≤ 800 was divided into grids of sµ by sµ
where s controlled the noise level and had a value of
1, 1.5 or 2. Within each grid, a point was placed ran-
domly while keeping clear of 10% margin around the
four border (so that no pair of noise points get too
close with each other). Thus, s = 1 gives the high-
est amount of noise, and s = 2 gives the least amount
of noise. Finally, 32 evenly spaced dots were placed
around a large circle centered at (500,500) with the
radius of 490. This circular pattern was intended to
provide a frame of reference to human subjects in our
third experiment as described below. Algorithm 2 was
applied to each dot pattern. Then, a polygon with the
highest overlap measure with the underlying shape as
defined in (3) was selected.
Figures 7 and 8 show dot patterns used in the ex-
periment and the most closely matched polygon in
terms of (3) in the representation. In the figures,
each row corresponds to one of 20 shapes. The first
four columns are dot patterns used for the experiment.
From left to right, they are the shape without any
noise, one with minimum amount of noise (s = 2),
one with medium amount of noise (s = 1.5), and one
with maximum amount of noise (s = 1). The next four
columns show the extracted polygon for each dot pat-
tern in the first four column. The number shown in
each figure is the overlap measure of (3). The aver-
age overlap measures among 20 shapes for different
noise levels are 0.93, 0.87, 0.80, and 0.52 for zero,
minimum, medium, and maximum noise levels, re-
spectively. Thus, the accuracy of the representation
degrade slowly as the noise level increase. At the
maximum noise level, some shapes are not perceiv-
able even for humans.
(a) image (b) Canny
(c) point pattern
(d) spanning tree
Figure 5
.
4.3 Experiment 3
Our final experiment is to investigate how the perfor-
mance of the straight polygon transformation based
shape extraction described above correlates with the
human perception. We recruited 20 volunteers on the
campus of University. Each subject was given a set
of four dot patterns and asked to delineate a salient
shape in the pattern and name the object. We manu-
ally selected 16 dot patterns that have diverse range of
’easy’ to ’difficult’ ones. Each dot pattern was viewed
by exactly five subjects. We calculated the proportion
of subjects who were able to recognize the underlying
object or delineated the shape accurately even though
failed to name the right object. The results are given
in Table 1. The first column gives the shape in the
pattern, the second column gives the noise level, the
third level gives the overlap measure of (3), and the
last column gives the recognition rate by the humans.
The overlap measure and the recognition rate are pos-
itively correlated with the Pearson coefficient of 0.54
(p=0.031).
GroupingofIsolatedNon-directionalCueswithStraightOffsetPolygons
345

Figure 6: Results of applying the grouping algorithm to nat-
ural images. From left to right: input image, Canny edges,
six grouping instances after consolidation with the highest
scores as defined in 2.
5 DISCUSSION
As our experiments show, the straight polygon rep-
resentation captures salient shape contained in a dot
pattern. We found strong correlation between pres-
ence of a shape in the representation and detectability
of the shape by human observers. Thus, the represen-
tation possesses a level of robustness against random
noise comparable to that of the human vision.
We attribute the effectiveness of the straight poly-
gon representation to the following three characteris-
tics. First, events are at discrete points in time and
space. In comparison, the medial axis transform un-
dergoes events at continuous points in time and space
when a circular front collides with another front. This
characteristic makes a simple recursive implementa-
tion and straightforward organization of the events.
Second, simple tree type data structure can be con-
structed to fully capture the evolution of polygons. It
can then be used to reverse the deformation and trace
0.90
0.76 0.60
0.39
1.00
0.92 0.94
0.67
0.98
0.96 0.92
0.68
0.88
0.81 0.78
0.49
1.00
0.97 0.95
0.74
0.78
0.75 0.74
0.51
0.99
0.94 0.89
0.76
0.99
0.95 0.86
0.67
0.97
0.94 0.85
0.45
0.83
0.80 0.64
0.38
Figure 7: Test patterns (first four columns) and grouping
results (last four columns) I.
0.96
0.90 0.86
0.28
0.71
0.65 0.55
0.34
0.99
0.90 0.88
0.50
0.98
0.85 0.46
0.45
1.00
0.90 0.84
0.63
0.95
0.92 0.84
0.54
0.81
0.77 0.79
0.66
1.00
0.96 0.95
0.53
0.96
0.88 0.77
0.34
0.92
0.88 0.87
0.39
Figure 8: Test patterns (first four columns) and grouping
results (last four columns) II.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
346
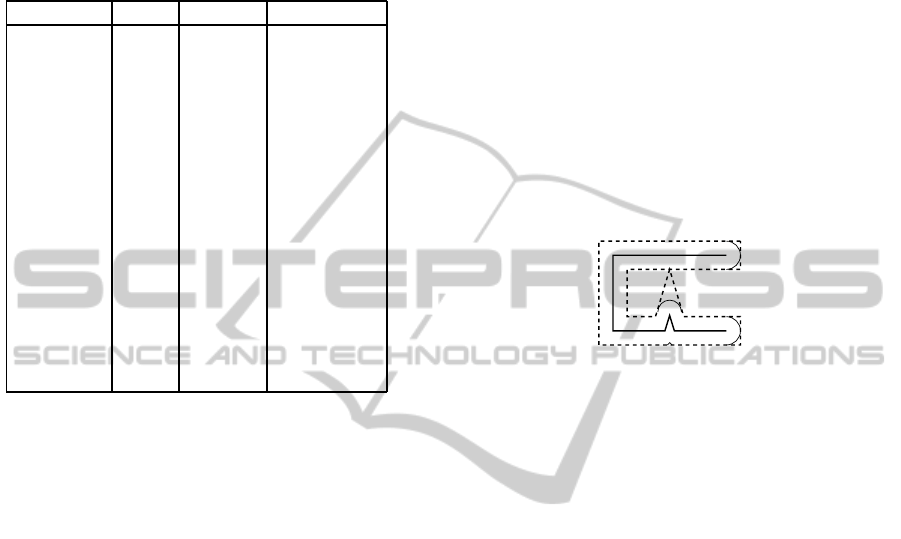
Table 1: Performance measures on the algorithm and hu-
mans. The overlap column shows the maximum overlap
measure as defined on (3) among polygons derived by the
algorithm. The recognition column shows the proportion of
five subjects who could recognize the shape. The two mea-
sures are positively correlated with the Pearson correlation
coefficient of 0.54(p = 0.031).
shape noise overlap recognition
Arrow Min 0.917 4/5
Camel Mid 0.776 4/5
Palm Tree Max 0.343 1/5
Pistol Min 0.899 2/5
Anchor Max 0.385 0/5
Balloon Min 0.959 4/5
Cherries Mid 0.738 5/5
Star Mid 0.786 1/5
Car Min 0.974 4/5
Dolphin Max 0.762 1/5
Fish Mid 0.845 2/5
Umbrella Mid 0.774 5/5
Duck Min 0.951 5/5
Horse Mid 0.641 5/5
Shoe Min 0.904 5/5
Violin Max 0.392 0/5
a vertex of a polygon to a point in the dot pattern.
Third, the curvature dependent smoothing character-
ized by (1) finds grouping quickly with less amount
of dilation than the medial axis transform. See Figure
9 for an illustration of comparing the straight skele-
ton transform and medial axis transform. The thick
solid line is an initial minimum spanning tree where
the transformation starts. The thick dashed line shows
the front of the straight polygon transform when the
first split event took place. The thin solid line shows
the front of the medial axis transform. Only locations
where the fronts are vastly different between the two
are shown.
We are still at an early stage of developing the
straight polygon representation into one that is more
applicable to other computer vision tasks. Here are
some of tasks that are left for our future endeavor.
The representation captures salient patterns, but at the
same time, keeps many non-salient ones. Since the
the number of groupings is O(n), it is feasible to ex-
amine each grouping more carefully than the simple
evaluation of Experiment 1 using the convexity mea-
sure of (2). We need to investigate how to quantify
the saliency of grouping and use it to filter non-salient
ones. Supervised learning may be able to assist this
task.
The initial polygon that is derived from a mini-
mum spanning tree is rather artificial and, in many
cases, does not reflect our perception. A better ap-
proach is to use more perceptually amiable initial
grouping. To build an initial grouping, we can em-
ploy the dot sequencing algorithm of (Rosenberg and
Langridge, 1973), for example. Most likely, there
will be multiple disjoint polygons at the beginning of
the straight polygon transform. Then, the algorithm
needs to consider split events with which two dis-
joint polygons are merged into one and handle them
slightly differently from events with which a single
polygon is split into two.
By allowing multiple polygons at the beginning,
the algorithm can easily extended to edge group-
ing. Each edge fragment generates a distinct poly-
gon. Eventually, edges are merged to form a polyg-
onal area. We can trace back the polygon vertices in
time as we outlined in this paper and find grouping of
edge pixels that originate the polygon.
Figure 9
.
6 CONCLUSION
Our approach uses a minimum spanning tree and
straight polygons as intermediate representations,
from which multiple grouping hypotheses are derived
by tracing back each polygon vertex to the original
point set and extracting disjoint polygons in the trace.
Unlike traditional dot grouping algorithms, our ap-
proach provides multiple grouping instances. Each
dot moves in at least two directions, thus can partici-
pate in both foreground and background and provide
multiple interpretations. The algorithm is parameter
free, simple, and deterministic.
Some of grouping hypotheses are perceptually
more salient than others. We need to assign a score
to each polygon using the geometry of the polygon in
a way the score reflects the perceptual saliency. The
initial grouping by a minimum spanning tree groups
all dots into a single polygon, thus simplifies the sub-
sequent algorithm slightly. However, it brings erro-
neous grouping especially in thin structures and be-
tween two separate clusters of points. More elaborate
initial grouping needs to be tried and studied.
ACKNOWLEDGEMENT
This work is supported by the United States National
Science Foundation grants CCF-1117439 and CCF-
GroupingofIsolatedNon-directionalCueswithStraightOffsetPolygons
347

1421734.
REFERENCES
Ahuja, N. (1982). Dot pattern processing using voronoi
neighborhoods. Pattern Analysis and Machine Intelli-
gence, IEEE Transactions on, (3):336–343.
Ahuja, N. and Tuceryan, M. (1989). Extraction of early per-
ceptual structure in dot patterns: integrating region,
boundary, and component gestalt. Computer Vision,
Graphics, and Image Processing, 48(3):304–356.
Aichholzer, O. and Aurenhammer, F. (1996). Computing
and Combinatorics, volume 1090 of Lecture Notes in
Computer Science, chapter Straight skeletons for gen-
eral polygonal figures in the plane, pages 117–126.
Springer.
Aichholzer, O., Aurenhammer, F., Alberts, D., and Gart-
ner, B. (1995). A novel type of skeleton for polygons.
Journal of Universal Computer Science, 1(12):752–
761.
Blum, H. (1967). A transformation for extracting new de-
scriptors of shape. Models for the perception of speech
and visual form, 19(5):362–380.
Chaudhuri, A., Chaudhuri, B. B., and Parui, S. K. (1997).
A novel approach to computation of the shape of a dot
pattern and extraction of its perceptual border. Com-
puter Vision and Image Understanding, 68(3):257–
275.
Edelsbrunner, H., Kirkpatrick, D., and Seidel, R. (1983).
On the shape of a set of points in the plane. Informa-
tion Theory, IEEE Transactions on, 29(4):551–559.
Elder, J. H. and Zucker, S. W. (1996). Computing contour
closure. In Proc. 4th European Conference on Com-
puter Vision, pages 399–412, Cambridge, UK.
Engbers, E. A. and Smeulders, A. W. M. (2003). Design
considerations for generic grouping in vision. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 25(4):445–457.
Greene, E. (2008). Additional evidence that contour at-
tributes are not essential cues for object recognition.
Behavioral and Brain Functions, 4(1):26.
Kubovy, M. and Wagemans, J. (1995). Grouping by prox-
imity and multistability in dot lattices: A quantitative
gestalt theory. Psychological Science, 6(4):225–234.
Lee, D.-T. (1982). Medial axis transformation of a pla-
nar shape. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, (4):363–369.
Mahamud, S., Williams, L., Thornber, K., and Xu, K.
(2003). Segmentation of multiple salient closed con-
tours from real images. IEEE Trans. on Pattern Anal-
ysis and Machine Intelligence, 25(4):433–444.
Melkemi, M. and Djebali, M. (2000). Computing the
shape of a planar points set. Pattern Recognition,
33(9):1423–1436.
O’Rourke, J., Booth, H., and Washington, R. (1987).
Connect-the-dots: a new heuristic. Computer Vision,
Graphics, and Image Processing, 39(2):258–266.
Rosenberg, B. and Langridge, D. (1973). A computational
view of perception. Perception, 2(4):415.
Toussaint, G. T. (1980). The relative neighbourhood graph
of a finite planar set. Pattern recognition, 12(4):261–
268.
Wang, S., Kubota, T., Siskind, J., and Wang, J. (2005).
Salient closed boundary extraction with ratio contour.
IEEE Trans. Pattern Analysis and Machine Intelli-
gence, 27(4):546–561.
Zahn, C. T. (1971). Graph-theoretical methods for detect-
ing and describing gestalt clusters. Computers, IEEE
Transactions on, 100(1):68–86.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
348
