
Versatile Scenario Guidance for Collaborative Virtual Environments
Guillaume Claude, Valerie Gouranton and Bruno Arnaldi
INSA de Rennes, IRISA (UMR6074) - Inria Rennes Bretagne Atlantique, Rennes, France
Keywords:
Virtual Reality, Scenarios, Collaboration.
Abstract:
Currently, the scenario of a virtual reality application depends greatly of the representation of the virtual
environment and the goals of the application. Different needs arise from these elements such as the abstraction
level of their events, the presence of multiple actors or their freedom of action. In this paper, we propose a
scenario engine model that aims at being used in any virtual reality application where the scenario is a key
feature. It differs from other models as it can be used without making any assumption on the simulation
purpose or on the modelling of the Virtual Environment (events model, objects behaviour).
1 INTRODUCTION
In virtual reality, the scenario depicts all the possible
sequencing of events allowed in the virtual environ-
ment. This description can be more or less rigid de-
pending on its model and the requirements of the sim-
ulation. In some cases, the actions are defined step by
step. The actor, a character driven by either a user or
an autonomous agent system, has limited choices and
must follow the scenario step by step. It is generally
the case of VR applications dedicated to the training
to industrial or surgical procedures. The scenario can
also be depicted as a set of rules that describes how
the actors have to behave, without much more guid-
ance. This case is widely spread in storytelling where
the focus is made more on the characters than on the
sequencing of the events. Once defined, the scenario
is loaded in a component of the virtual reality system:
the scenario engine. The engine uses the scenario to
modify the virtual environment and to adapt its inner
state to the obtained reactions.
In the context of the development of a virtual real-
ity application framework, we need a model that fits
in any simulation where the scenario is a key point.
Thus, we do not make any assumption about the pur-
pose of the simulation or its application domain. Fur-
thermore, the events occurring in it are not defined
either. The purpose of the simulation also defines the
level of guidance provided by the scenario. As an ex-
ample, if the simulation focuses on the training to a
procedure, the scenario may guide the user step by
step in his or her actions. It could also wait for the en-
vironment to reach specific state to notify the achieve-
ment of a goal. Two different scenarios can be applied
to a unique virtual environment to provide a version
of the simulation with guidance to train the user and
a second version without guidance to test his or her
training. Finally, the simulation could involve more
than one actor. To provide a more accurate model of
multi-actor social situations, especially collaboration,
we decided to base our work on the role theory (Bid-
dle and Thomas, 1966).
Based on these needs, we have addressed a list of
features our ideal scenario model must provide:
• No specific types of events
• No imposed level of guidance
• Role theory modelling for collaboration
2 RELATED WORK
In this section, we present existing work on scenar-
ios for virtual environments. The first two parts are
focused on an overview of this work. We then study
some of them through the criteria proposed in section
1. In the remainder, we call ’actor’ an avatar inter-
acting in the VE and controlled by either a user or an
artificial intelligence.
2.1 Emerging Scenarios
Emerging scenario models aim at leaving more free-
dom to the actors. They define a set of rules, to con-
straints actors behaviour, that can evolve with time
depending on the actors actions and on the state of
415
Claude G., Gouranton V. and Arnaldi B..
Versatile Scenario Guidance for Collaborative Virtual Environments.
DOI: 10.5220/0005264204150422
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 415-422
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Table 1: Synthesis of several Scenario model features.
Events Guidance Role
Emergent models actions of actors none Movie like
EMSAVE ”Go forward” notification static none
LORA++ STORM only specified paths static, describe actions
HAVE VEHA only goals to reach static, actions and goals
StoryNets Predefined events static story elements none
the virtual environment. The sequencing of the events
is a consequence, not controlled by the author.
In VRaptor (Shawver, 1997), the scenario emerges
from the behaviour of the virtual humans and from
the actions (not constrained) of the user. In Facade
(Mateas and Stern, 2002), story elements (beats) de-
scribe the behaviour of the agents and are designed to
respond to the user behaviour in an appropriate man-
ner. Cavazza et al. (Cavazza et al., 2007) proposed a
system where the behaviour of the agents is driven by
their feelings. The actions of the actors have a set of
preconditions and a set of effects on these parameters.
In the remainder, we will not focus more on this
kind of scenario engine as we want to focus on the
sequencing of the event and on the scenario itself.
2.2 Predefined Scenarios
Predefined scenario engines depict all the possible
sequencing of events that may occur in the simula-
tion. Some of them could be limited to a unique ex-
ecution. In EMSAVE (Vidani and Chittaro, 2009),
the actor has several choices during the simulation,
but only one is actually able to unfold it. More
complex engines describe several possible sequenc-
ing of the events that can occur during the simula-
tion. LORA++ (Gerbaud et al., 2007), the StoryNets
of MRE (Swartout et al., 2006), or HAVE (Chevail-
lier et al., 2012) are based on automata and are able to
express intricate sequencing of the events.
Predefined scenario engines are generally used for
scenarios with a small amount of alternatives. They
are reliable when the main concern is to guide the ac-
tors through a specific task or story but they generally
reach their limits when they are used in a VR system
that needs more freedom.
2.3 Modelling of Events
To be able to adapt itself to the evolution of the sim-
ulation, the scenario engine must be able to perceive
the changes occurring in the environment. In many
environments, the more common events are the ac-
tions of the actors. LORA++ relies on the model
STORM (Mollet et al., 2007), able to model collab-
orative actions. HAVE, a language extended from
the UML activity diagram, relies VEHA (Chevaillier
et al., 2012) (also an extension of UML) describing
the behaviour of the objects in the environment. Other
ways to model events can be found in the literature,
even if they are not directly connected to scenario
models. The work of Willans and Harrison (Willans
and Harrison, 2001) proposes to model the behaviour
of the objects in the VE using Petri nets. Lugrin and
Cavazza (Lugrin and Cavazza, 2007) propose an in-
teraction model based low level physical events se-
quences recognition.
2.4 Guidance Level
The guidance level of the scenario defines how free is
the actor to act at a specific point of the simulation. As
stated before, in EMSAVE the actor can only perform
only one action. Even if the system offers multiple
choices, only one of them will truly affect the virtual
environment. Others will simply provide knowledge
to the user about why they are not the good option.
As they are based on automata, LORA++, HAVE and
StoryNets give more freedom to the user. However,
LORA++ is specialised in procedural training and the
actors are not supposed to do nothing but following
the procedure. HAVE proposes an ideal scenario with
goals to reach but the actors are free to act as they
wish, even not following the scenario. StoryNets of-
fer nodes where the actor is free to act. These nodes
are linked together with scripted phases (as in video
games cut-scenes). The choice of one link before an-
other depends on what has append during the free
phases. However, the user can not intervene in the
cut-scenes.
2.5 Role Modelling
The role theory (Biddle and Thomas, 1966) defines
the role of a person as what he or she can do, and what
he or she has to achieve in regard of a situation and in
a specific social context. This definition helps to de-
scribe multi-actor organisations such as team work.
In virtual reality, this definition fits well to collabo-
rative virtual environments. The ”can do” part of the
theory defines the actions an actor can execute in re-
gard of the simulation state. The ”has to achieve” part
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
416
matches to the goals the actors have to reach (alone or
collectively).
LORA++ uses roles to define the actions an actor
can execute in the virtual environment. This expres-
sion of role matches partially with the role theory but
lacks dynamic evolution at runtime and goal defini-
tion. HAVE defines roles as classes where the possi-
ble actions are depicted as well as the goals. These
roles are then used as regular UML activity diagram’s
partitions. The roles are given to users. However, the
roles do not seem to evolve during the simulation.
2.6 Synthesis
In the literature, we have not found a scenario model
that fits with all of our criteria (see table 1):
• Types of events: Each model is tightly related
to another model used to express interaction
(LORA++ and STORM) or behaviour (HAVE and
VEHA) or to specific kinds of actions (speech
recognition for StoryNets or ”Go forward” com-
mand for EMSAVE).
• Level of guidance: Each of them has a specific
level of guidance (from very limited (EMSAVE)
to totally free (HAVE)). But none of them is able
to adapt itself, making them restricted to specific
simulations.
• Role theory: The role theory is not applied or only
partially (LORA++ and HAVE)
3 MODEL OVERVIEW
In this section, we present our scenario model for vir-
tual reality applications. Its main concerns are:
• Intricate event sequencing,
• Adaptability to any kind of virtual environment
regardless of the event model,
• Complete expression of roles,
• Consistency between the parameters in a se-
quence of events
We aim at providing a solution to problems com-
mon to scenarized virtual environments. However,
problems raised by technical or applicative contexts
are handled by a set of tools used by our model. If
needed, new tools can be defined by the user.
3.1 Model Basis: Sequencing and
Adaptability
The event sequencing is handled by using safe Petri
nets (Murata, 1989) as a base model. We have de-
Figure 1: Use of Petri nets to interact with the virtual envi-
ronment.
cided to use Petri nets above state machines because
the latter lacks in expressiveness for parallelism. It
can be an issue to model partial ordering in the events.
Furthermore, Petri nets have been widely studied and
extended in the literature. Using Petri nets in Virtual
Reality systems is not new. As an example, Smith
and Duke (Smith et al., 1999) have applied them to
interaction.
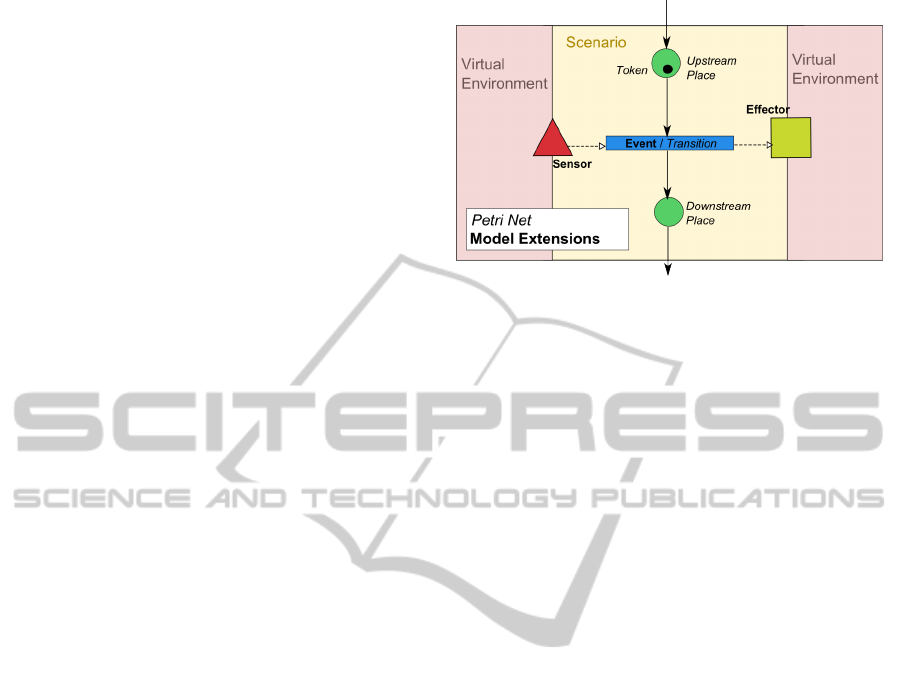
The transitions, modelling the events in Petri nets,
are completed using two entities, the sensor and the
effector (see figure 1). Sensors are the input part of
the model. Their job is to wait for specific conditions
to be reached. As an example, this condition can be
that a specific action has been executed or that a vari-
able in the environment reaches a value. When the
condition is met, the transition related to the sensor is
triggered. Effectors are the output counterpart. They
run a defined behaviour when the related transition is
triggered. As an example, a specific type of effec-
tors can be used to modify the roles of the actors in
the environment or to start the execution of a script.
The sensor and the effector offer to extend the model
to be able to adapt it to any kind of event modelling.
As an example, a specific type of sensor can be de-
fined to detect low level physical events modelling of
actions as proposed by Cavazza et al. (Lugrin and
Cavazza, 2007) and an other can be created to match
with STORM (Mollet et al., 2007).
3.2 Roles Description
In order to fit with role theory, we have embedded in
our model the ability to give a fine-grained description
of the actions related to roles. Furthermore, these de-
scriptions of roles can be changed dynamically. The
role of the actors is expressed by using an element
called the attribution. Each transition of the scenario
can be labelled by any number of attributions. Each
actor possesses a subset of the attributions used in the
VersatileScenarioGuidanceforCollaborativeVirtualEnvironments
417

scenario. An actor is only able to see the transitions
of the scenario labelled by its own set of attributions.
Using this feature, the role of an actor is defined by it
own set of attributions. More complex conditions can
be expressed by this feature. It is possible to allow
an actor to view a transition only if he or she has an
expected combination of attributions. For example, a
transition can only be seen by an actor if he or she has
the attribution a and b but not c.
Our model expresses goals by a specific subset of
the places, called final places, which needs to hold
a token all at once. This set defines a subset of the
markings state that, if one of them is reached, the sce-
nario is considered as a success. Another subset of the
places, called initial places, defines the initial marking
of the scenario. We have also defined that a place can
contain a scenario. When a place containing a sce-
nario receives a token, the inner scenario receives a
token on all of its initial places. When a final marking
is reached, the place is considered as holding a token
by the downtream transitions. Using this feature, it
becomes possible to express intermediate goals.
3.3 Activity Consistency
As multiple users can have access to the same sub-
net, one issue left is to maintain the consistency of
the parameters in a specific sequence of events. It is
achieved by giving transitions the ability to manipu-
late data stored in the tokens of the Petri net. These
data are then used by the sensors when they check that
a transition can be triggered or not.
In the remainder of this paper, we call ”Activ-
ity Continuum” a subnet in which parameters of the
events are consistent. For example, if the author of
the scenario needs to restrict a sequence of action to
the user that started it, the first transition has to store
the identity of the actor on the token. The sensors
in the continuum then check the identity of the actor
and refuse to any other the triggering of a transition.
Other use of this feature can be applied to multiple
parameters.
3.4 Deadlocks
Deadlocks are a common problem in many systems.
In our case they mean that, given the current marking,
it does not exist a sequence of events that leads to a
final marking. This reachability problem is widely
treated, and solved, for Petri nets in the literature
(Mayr, 1984). Once the deadlock is detected, solu-
tions can be to prevent the activation of transitions
leading to the deadlock or reloading the environment
and the scenario to a previous state if a deadlock is
reached.
3.5 Comparison with a Standard: UML
Activity Diagrams
UML Activity Diagrams (UAD) may be seen as suf-
ficient to express Collaborative Virtual Environment
scenarios. They are inspired by Petri nets, model con-
currency or dispatch the activity between the different
stakeholders of a process (Fowler, 2004).
As they are not a scenario model, many of the
problems may need a specific solution instead of us-
ing generic and reusable components. An example
will be the use of a tool. In our model we can express
the ability given by a tool to its wielder using assign-
ments. UAD will require to manipulate a specific data
structure and to test it each time an action requires this
ability. The modelling of several stakeholders is also
limited. It will be difficult to distinguish the actors
from their roles. Furthermore, UAD do not provide
any built-in means to express dynamic changes on the
attributions of the roles.
4 MODEL FEATURES
In this section, we detail three features of our scenario
engine with different cases:
• Different usage of roles: case of the access to ac-
tions
• Expressing constraints on the parameters of a se-
quence of events: case of the identity of the actors
• Using assignments to model an ability: case of the
usage of tools
Figure 2: Our Virtual Reality Application.
We have integrated our model in a CVE for the
training to a procedure. Our objective is to demon-
strate that, with only small changes in the scenario,
we can easily affect the behaviour of the actors and
the unfolding of the simulation. These changes could
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
418
consist to add or remove a transition at a specific point
of the scenario, changing the initial attribution of the
roles of the actors or adding an activity continuum on
a sub-scenario.
4.1 Use Case
Our VR application aims to train the users to change
the wheel of a car. The procedure, and our scenario,
is defined by four steps:
• Unscrewing the four screws
• Removing the old wheel
• Installing the new wheel
• Screwing back the screws
To achieve this procedure, we propose eight ac-
tions to the actors in our Virtual Environment:
• take/release a screwdriver
• Screw/Unscrew a screw
• Remove/Release the old wheel
• Take/Install the new wheel
Furthermore, the procedure implies some con-
straints:
• The screws can be removed in any order
• The screws must be screwed crosswise based
on the first screw but without constraints on the
choice of this screw
• The only way to act upon screws is to possess a
screwdriver.
In the following sections we add constraints based on
the goals of the simulation. It will impact the scenario
without changing the unfolding of the procedure.
We mainly use one type of effector and one type
of sensor in our application. The type of the sensors is
”Action sensor”. They aim at triggering the attached
transition when a specific action is executed by an ac-
tor. The type of the effectors is ”Actor Assignments
Modifier”. They add or remove assignments to an ac-
tor that triggers the related transition. The roles of the
actor is defined using a set of assignments described
in Figure 3.
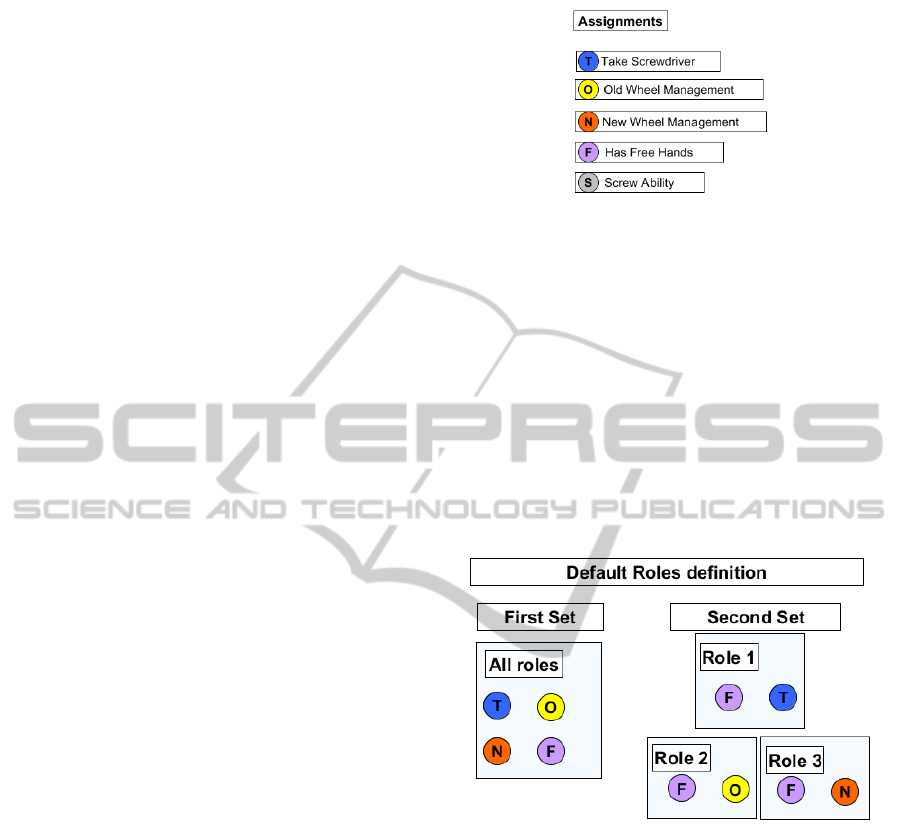
4.2 Role Modelling
In our scenario, we have defined three roles: ”Screws
manager”, ”Old-wheel manager” and ”New-wheel
manager”. In addition, we have used the assignments
to express the fact that a user must have the hand
free to take an object (the screwdriver or one of the
wheels). It is consistent with the role theory as, if an
Figure 3: Assignments are a fine grain elements composing
roles.
actor has his or her hand free, one can expect him or
her to execute specific actions.
Our first use case uses one specific scenario but
with two different sets of default roles (see figure 4):
• In the first set, a unique role is assigned to all
users. Each user is able to execute any steps of
the procedure.
• The second set specifies three different roles (old
wheel responsible, new wheel responsible and
screwer). Each role is necessary to achieve the
scenario.
Figure 4: In the first set, each user has the same role. In the
second set, specific roles have been created for each task of
the procedure.
The second set constrains users to have more spe-
cific activities during the simulation. It implies that
the simulation must be executed with at least three
actors (one for each specific role). The first set allows
the scenario to be executed with one actor. Obviously,
one can define others sets of roles (e.g. ”screwer” and
”wheels responsible”). Changing this configuration
has no impact on the writing of the scenario itself. It
is achieved by changing on the initial attributions of
the actors. Thanks to our model, we can achieve sev-
eral different simulations using the same scenario. A
video showing an execution of this case can be found
at https://vimeo.com/109443535.
VersatileScenarioGuidanceforCollaborativeVirtualEnvironments
419
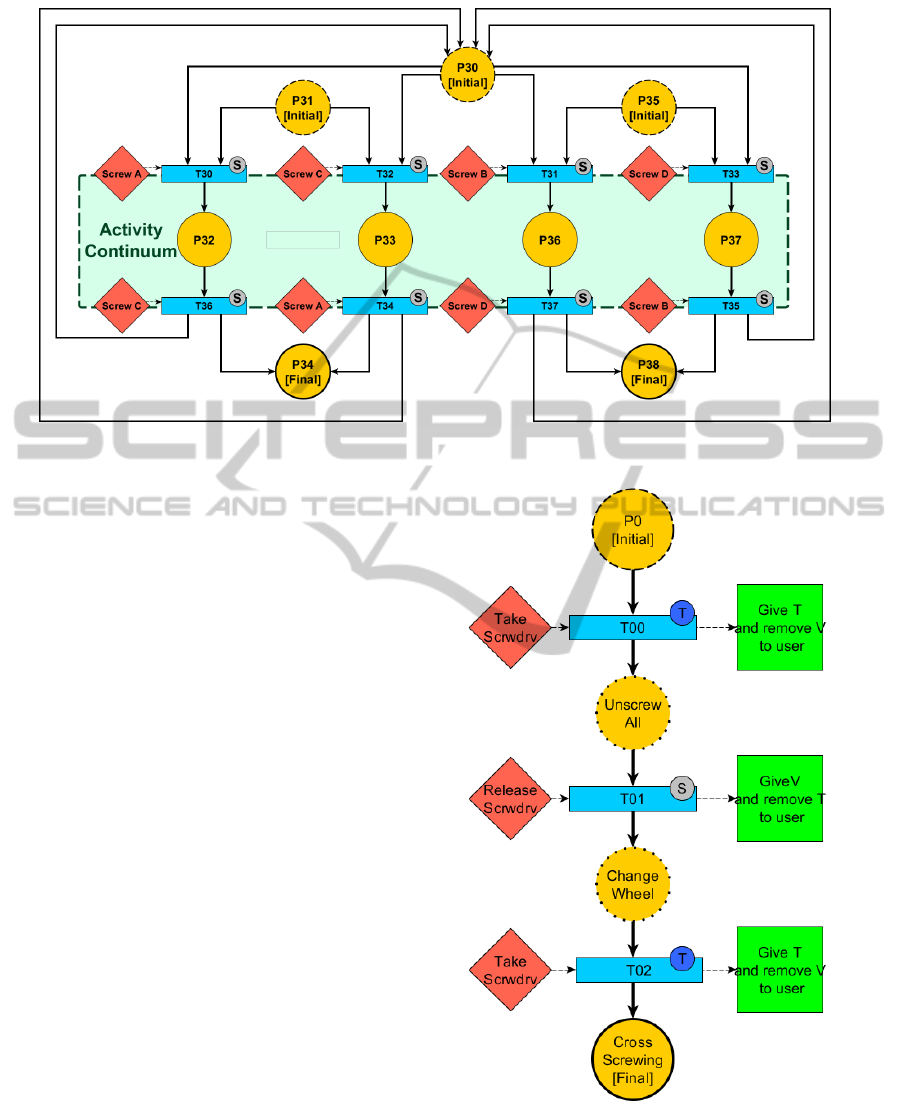
Figure 5: Using the activity continuum (grey area) feature, only the actor that has started the activity is able to finish it.
4.3 Activity Continuum
In the real world, stopping an on-going activity and
leaving someone else dealing with it is possible most
of the time. However, it is generally not the most ef-
ficient way to handle things. Usually, the person that
starts the activity drives it to its term. It is mainly due
to a desire of saving time or energy. While writing a
scenario for a CVE, the author may want to express
one case or another. In this section we propose the
two ways to express a unique scenario.
The first scenario is dedicated to freedom of ac-
tion. Any actor with the correct assignment com-
bination is able to execute an action. The second
scenario, using the activity continuum feature, aims
at being closer to the more efficient way to execute
the procedure. When an actor execute the first ac-
tion of the sequence, he or she becomes the only ac-
tor able to trigger the downstream transitions up to
the last action of the sequence.These two scenarios
are opposed in their objectives. Using our model,
there is only little changes between the two. In Fig-
ure 5 the activity continuum is modelled by the the
grey area that links all of the transitions. A video
showing an execution of this case can be found at
https://vimeo.com/109446234
4.4 Tool Usage
In this use case, we focus on how to model the neces-
sity to use a tool in the scenario. We consider the tool
as an element giving a specific ability to its owner. In
our case, possessing the screwdriver allows an actor to
Figure 6: In this scenario, the actor must take the tool just
before using it.
act upon the screws. In this section, we confront two
different solutions, among others, to solve this prob-
lem. In one of our solution (see Figure 6), the actions
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
420

Figure 7: In this scenario the actor must have the right tool
to execute specific actions, but there is no constraint on how
he has acquired it.
to take or put back the tool are integrated as, respec-
tively, first and last steps of the activity. These two
actions are fully synchronized with the main part of
the activity. Our second solution uses two Petri nets:
one is used to express that an actor can take or put
back the tool and the other is the activity itself. In
this second case (see Figure 7), the actor can take or
put back the tool at any time and any actor holding
a screwdriver can continue the activity. This solution
decorrelates the actions on the tool and the actions on
the screws.
The two solutions have a different level of guid-
ance and realism. The first solution restricts more the
actions of the actor, focusing on a specific sequenc-
ing. The second solution offers more freedom to the
actor. He or she can take or release the screwdriver
at any moment of the activity. However, without the
tool the actor is not able to perform any screwing ac-
tion. A video showing an execution of this case can
be found at https://vimeo.com/109446235.
4.5 Open Scenario
Finally, our model can be used to only express con-
straints on the environment, such as the old wheel
must be removed to put the new one, without guid-
ing the actors in the sequencing of their actions. In
our previous examples, the scenario guides the ac-
tors through the procedure. Here, the scenario defines
constraints between the actions and the goal to reach
(via the final places). The Figure 8 shows a part of
this scenario. This approach is more suited to specific
cases such as the evaluation of the users after being
trained using one of the previous scenarios. It can
also fit to model the interaction constraints in an open
world (or sandbox) virtual reality application. We can
notice that this scenario is really close to those pro-
viding more guidance. In fact, we have reused many
of the components.
Combining the two approaches is also possible,
thanks to the flexibility of our model. As an exam-
ple, one can write scenarios with multiple levels of
guidance depending on the steps of the simulation.
4.6 Synthesis
Our model allows a scenario to be reused to match
changes on criteria such as the purpose of the simula-
tion or the degree of expertise of the a user. Further-
more, It can be achieved thanks to small alterations
on the scenario. An other example of the use of our
model can be found in (Claude et al., 2014).
5 CONCLUSION AND FUTURE
WORK
In this paper we have depicted the features of our sce-
nario engine model:
• Its ability to be connected to any type of events or
virtual environments
• The possibility to express intricate scenarios
• The freedom given to the author to define the
guidance level
• The expressiveness of the dynamic role modelling
based on the role theory
• Its ability to maintain consistency in the parame-
ters of sequences of events
However, our expression of the role theory is not
yet complete. Currently, the expression of goals is
limited to common goals (intermediate or not). Cur-
rently, our model misses the ability to express role
related goals. An other main issue left is to detect
deadlocks even in parametrized events. Even if the
scenario allows to trigger an event, it is possible that
the related condition is never be reached in the envi-
ronment.
ACKNOWLEDGEMENTS
This publication is supported by the S3PM project of
the CominLabs Excellence Center. The prototype has
been developed with the help of Thomas Boggini, Ju-
lian Joseph and Rozenn Bouville-Berthelot.
VersatileScenarioGuidanceforCollaborativeVirtualEnvironments
421

Figure 8: A part of the non-guided version of the scenario.
REFERENCES
Biddle, B. and Thomas, E. (1966). Role theory: concepts
and research.
Cavazza, M., Lugrin, J.-L., Pizzi, D., and Charles, F. (2007).
Madame bovary on the holodeck: Immersive interac-
tive storytelling. In Proceedings of the 15th Inter-
national Conference on Multimedia, MULTIMEDIA
’07. ACM.
Chevaillier, P., Trinh, T.-H., Barange, M., De Loor, P., Dev-
illers, F., Soler, J., and Querrec, R. (2012). Semantic
modeling of virtual environments using mascaret. In
Software Engineering and Architectures for Realtime
Interactive Systems (SEARIS), 2012 5th Workshop on.
IEEE.
Claude, G., Gouranton, v., Bouville Berthelot, R., and Ar-
naldi, B. (2014). Short Paper: #SEVEN, a Sensor Ef-
fector Based Scenarios Model for Driving Collabora-
tive Virtual Environment. In ICAT-EGVE.
Fowler, M. (2004). UML distilled: a brief guide to the stan-
dard object modeling language. Addison-Wesley Pro-
fessional.
Gerbaud, S., Mollet, N., and Arnaldi, B. (2007). Virtual
environments for training: From individual learning
to collaboration with humanoids. In Technologies for
E-Learning and Digital Entertainment, volume 4469
of LNCS. Springer Berlin Heidelberg.
Lugrin, J.-L. and Cavazza, M. (2007). Making sense of vir-
tual environments: action representation, grounding
and common sense. In Proceedings of the 12th in-
ternational conference on Intelligent user interfaces.
ACM.
Mateas, M. and Stern, A. (2002). A behavior language for
story-based believable agents. IEEE Intelligent Sys-
tems, 17.
Mayr, E. W. (1984). An algorithm for the general petri net
reachability problem. SIAM Journal on computing,
13(3).
Mollet, N., Gerbaud, S., Arnaldi, B., et al. (2007). Storm:
a generic interaction and behavioral model for 3d ob-
jects and humanoids in a virtual environment. In IPT-
EGVE the 13th Eurographics Symposium on Virtual
Environments.
Murata, T. (1989). Petri nets: Properties, analysis and ap-
plications. Proceedings of the IEEE, 77.
Shawver, D. M. (1997). Virtual actors and avatars in a flex-
ible user-determined-scenario environment. In Virtual
Reality Annual International Symposium. IEEE Com-
puter Society.
Smith, S., Duke, D., and Massink, M. (1999). The hybrid
world of virtual environments. In Computer Graphics
Forum, volume 18. Wiley Online Library.
Swartout, W., Hill, R., Gratch, J., Johnson, W. L., Kyri-
akakis, C., LaBore, C., Lindheim, R., Marsella, S.,
Miraglia, D., and Moore, B. (2006). Toward the
holodeck: Integrating graphics, sound, character and
story. Technical report, DTIC Document.
Vidani, A. C. and Chittaro, L. (2009). Using a task mod-
eling formalism in the design of serious games for
emergency medical procedures. In Games and Virtual
Worlds for Serious Applications, 2009. IEEE.
Willans, J. and Harrison, M. (2001). Verifying the be-
haviour of virtual environment world objects. In Inter-
active Systems Design, Specification, and Verification,
volume 1946 of Lecture Notes in Computer Science.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
422
