
Robust Method of Vote Aggregation and Proposition Verification for
Invariant Local Features
Grzegorz Kurzejamski, Jacek Zawistowski and Grzegorz Sarwas
Lingaro Sp. z o.o., Puławska 99a, 02-595 Warsaw, Poland
Keywords:
Computer Vision, Image Analysis, Multiple Object Detection, Object Localization, Pattern Matching.
Abstract:
This paper presents method for analysis of the vote space created from the local features extraction process
in a multi-detection system. The method is opposed to the classic clustering approach and gives a high level
of control over the clusters composition for further verification steps. Proposed method comprises of the
graphical vote space presentation, the proposition generation, the two-pass iterative vote aggregation and the
cascade filters for verification of the propositions. Cascade filters contain all of the minor algorithms needed for
effective object detection verification. The new approach does not have the drawbacks of the classic clustering
approaches and gives a substantial control over process of detection. Method exhibits an exceptionally high
detection rate with conjunction with a low false detection chance in comparison with alternative methods.
1 INTRODUCTION
Object detection based on local features is well known
in the computer vision field. Many different re-
searches brought about different features and meth-
ods of scene analysis in search of a particular object.
Recently developed feature points are proven to be
well suited for a specific object detection, rather than
a generalised object’s class identification. As many
applications of local features has been evaluated, the
ability to describe selective elements of rich graph-
ics is the main purpose of invariant local features in
many fields. Amongst the most popular local features
are e.g. SIFT, SURF, BRISK, FREAK, MSER. These
are commonly described as feature points or feature
regions. They are easy to manipulate and to match.
Use of such local features gives not only the ability to
describe the object in many ways, but also to achieve
invariance for basic object and image transformation,
as skew, rotation, blur, noise. Invariant local features
used in conjunction with invariant characteristic re-
gion detectors, such as Harris-Affine or SIFT detector,
provide data for thorough scene-object analysis, lead-
ing to detection of an object in the scene. Giving an
appropriate set of features one can determine the ex-
act position of the object in the scene with a specified
scale, rotation and even minor, linear deformations.
The straightforward approach to a detection task
is to identify local features in the scene and the pat-
tern and match them against themselves, using an ap-
propriate metric. Common evaluations of such sys-
tems use brute KNN classification or its derivatives
as FLANN KNN search or BBF search. These give
good approximation of, theoretically ideal, results
with substantially lower computational cost. Some
of the applications make use of a LSH hashing but
this approach does not provide practical distance data
needed for further analysis. Matching local features
provides set of correspondences, that can be filtered
later. Under the assumption, that the scene contains
one or no instance of the object, correspondence can
be put into the object-related or noise-related class. To
distinguish which class a particular correspondence
belongs to, few methods have been developed. Fre-
quently used method for such purpose is RANSAC,
giving very good results, even for a high level of
noise-related correspondences. After the classifica-
tion of correspondences the model can be assumed
and a homography can be calculated. Well designed
parameters and filters can lead to high detection rate
and low false detection chance. RANSAC and quan-
titative analysis of correspondence data become in-
efficient, when a contribution of noise-related corre-
spondences in whole correspondence group grows.
Because of that such approach is not sufficient for
scenes, where the objects occupy small share of the
image. Methods mentioned above will not work well
with multiple objects present in the image as well.
Systems for multi-detection purposes incorporate
divide and conquer approach. Each correspondence
252
Kurzejamski G., Zawistowski J. and Sarwas G..
Robust Method of Vote Aggregation and Proposition Verification for Invariant Local Features.
DOI: 10.5220/0005267002520259
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 252-259
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

can be assigned to one of N+1 classes, where N is
the number of objects in the scene. There is no
known, straightforward method of assigning corre-
spondences. Most applications use correspondences
as votes in a multidimensional space. Vote space
can be clustered with common clustering algorithms.
Each cluster can be processed with a single-object de-
tection algorithm. Clustering approaches can be di-
vided into two groups. The first one consists of sparse
clustering, where each cluster should contain all the
needed vote data of a specific class. Such methods
show low detection rate because of a far from ideal
clustering process and a high level of parametrization.
Second group is dense clustering, where clusters may
contain only small portion of a particular correspon-
dence class. Its analysis leads to creating or support-
ing hypothesis of the object’s occurrence in the scene.
The flagships in that matter are Hough-like methods.
Such approaches show high detection rate but high
false positive rate as well. There are some works
that try to segment the scene with known context, as
shown in the work of Iwanowski et al. (Iwanowski
et al., 2014).
In our tests both clustering approaches lacked the
ability to attain a very high detection rate with a very
low false positive rate at the same time. For our test
cases a processing power is not a limitation and the
images are of a very high quality. Our test data con-
tains from zero to up to 100 objects per image and
presents different environmental conditions. Most of
the stat-of-the-art publications do not test detection
capabilities for such complex tasks. We found that
current approaches cannot maintain good detection
rate to false positive rate ratio on satisfactory level in
many real life applications.
This paper presents the method of vote space anal-
ysis, a part of invention shown in (Kurzejamski et al.,
2014). The method can be adjusted to a vast variety of
object detection purposes, where the effectiveness and
a low false positive rate is crucial. The method has
been developed to work well with huge amount of fea-
ture data, extracted from high quality images. Most of
the algorithms used in the new approach come with
a logical justification. The new method uses the it-
erative vote aggregation, starting from proposition’s
positions. Propositions are generated from a graph-
ical vote space analysis. Aggregated data undergoes
analysis and filtration. Whole process has a two-pass
model, that makes the method robust to some specific
object positioning in the scene. Cascade of a specially
selected set of filter algorithms has been utilized to re-
ject most of the false positive detections.
2 RELATED WORK
Local features in the image can be tracked a long way
in the literature. We present state-of-the-art feature
points extracting and describing methods, that can be
used in our method, and similar frameworks for multi-
object detection purposes developed through the last
years.
2.1 Feature Points
Our method should be used with conjunction with
scale-invariant and rotation-invariant features for the
best results. Usage of local features lacking any of
this characteristics may come with a need for rejec-
tion of some parts of our method, but can be imple-
mented nevertheless.
The best known feature points, up to this point, are
SIFT points developed by Lowe (Lowe, 1999), which
became a model for various local features bench-
marks. The closest alternative to SIFT is SURF (Bay
et al., 2008), that comes with a lower dimension-
ality and, in the result, a higher computing effi-
ciency. There are also known attempts to incorpo-
rate additional enhancements into SIFT and SURF
as PCA-SIFT (Ke and Sukthankar, 2004) or Affine-
SIFT (Morel and Yu, 2009). SIFT and SURF and
its derivatives are computationally demanding dur-
ing matching process. In last years there has been
big development in feature points based on binary
test pairs, that can be matched and described in a
very fast manner. The flagships of this approach
are BRIEF (Calonder et al., 2010), ORB (Rublee
et al., 2011), BRISK (Leutenegger et al., 2011) and
FREAK (Alahi et al., 2012) features. Most of the
cited algorithms can be used to create dense and
highly discriminative voting space, which holds sub-
stantial object correspondence data needed to accom-
plish many of the real-world detection tasks.
2.2 Frameworks
There are few approaches to conduct multi-object
multi-detection, meaning detecting multiple differ-
ent objects on the scene, where any object can be
visible in multiple places. Viola and Jones (Viola
and Jones, 2001) developed cascade of boosted fea-
tures, that can efficiently detect multiple instances of
the same object in a one pass of the detection pro-
cess. The method needs a time consuming, learn-
ing process with thousands of images. Method has
been mostly tested on general objects, as people,
cars, faces. Most straightforward method for multi-
detection is using all of the sliding windows as used,
RobustMethodofVoteAggregationandPropositionVerificationforInvariantLocalFeatures
253

for example, in Sarwas’ and Skoneczny’s work (Sar-
was and Skoneczny, 2015). Most of them are un-
fortunately computationally expensive. High effec-
tiveness can be achieved with Histogram of Oriented
Gradients (Dalal and Triggs, 2005) and Deformable
Part Models (Felzenszwalb et al., 2010). The biggest
drawbacks for our application is that Deformable Part
Models needs learning stage and Histogram of Ori-
ented Gradients is not rotation invariant. Blaschko
and Lampert in (Blaschko and Lampert, 2008) uses
SVM to enhance the sliding window process. Ef-
ficient subwindows search has been used in (Lam-
pert et al., 2008). In addition, branch-and-bound
approaches, as in (Yeh et al., 2009), are promising
for multi-detection purposes with conjunction with
Bag-of-words descriptors. Lowe (Lowe, 2004) pro-
posed generalized Hough Transform for clustering
vote space with SIFT correspondence data. Authors
of (Azad et al., 2009) created a 4D voting space
and used combination of Hough, RANSAC and Least
Squares Homography Estimation in order to detect
and accept potential object instances. Zickler in et
al. (Zickler and Efros, 2007) used angle differences
criterion in addition to RANSAC mechanisms and
vote number threshold. Zickler et al. in (Zickler and
Veloso, 2006) used custom probabilistic model in ad-
dition to Hough algorithm.
In our system’s application we could use only one
generic pattern image per object so we rejected most
of the learning-based global descriptors.
3 ALGORITHM
The algorithm presented by authors is built upon two
mechanisms: the vote spaces creation and a vote ag-
gregation for each of the vote spaces created. The
vote space is created for each pattern. Its adjacency
data is projected onto the (X, Y) plane, creating vote
images (one for each vote space). The vote images
are analysed in search for object’s position proposi-
tions. This mechanism is shown in the Algorithm 1.
The aggregation process is performed for each vote
space and for its each proposition, starting from the
proposition with the highest adjacency value. Aggre-
gation consists of two passes with slightly different
vote gathering approaches. The first pass is needed
to estimate the detected object’s area in the scene, so
the second aggregation pass would gather only votes
considered to be from that particular object’s instance.
The structure of each pass is presented in Algorithm
2.
Algorithm 1: Vote Data, Vote Image and proposi-
tions creation.
Data: Original Patterns (OPT), Scene Image
(SCN)
Result: Vote Data and propositions for
object’s centres for each pattern.
1 Feature points extraction on OPT and SCN;
2 foreach pattern in OPT do
3 Find correspondences (COR) between
pattern and SCN feature points;
4 foreach correspondence in COR do
5 Reject if has low distance value;
6 Reject if has high hue difference value;
7 Calculate adjacency value;
8 end
9 Creation of vote space (VS) from COR;
10 Creation of vote image (VI) from VS;
11 Search for propositions (PR) in VI;
12 Sort PR list;
13 end
Algorithm 2: Vote aggregation and detection accep-
tance.
Data: VI, VS, PR
Result: Occurrences (OCR) in the SCN for a
particular pattern
1 foreach Proposition in PR do
2 Gather all votes in local area from VS;
3 Unique filtering for gathered votes (V);
4 Cascade filtering for V;
5 if not rejected by cascade filtering then
6 Estimate object’s area;
7 Gather all votes with a Flood Fill
algorithm;
8 Unique filtering for new V;
9 Cascade filtering for new V;
10 if not rejected by cascade filtering then
11 Calculate object’s area;
12 Create occurrence entry in OCR;
13 Erase all vote data in occurrence’s
area in VS and VI;
14 else
15 reject proposition
16 end
17 else
18 reject proposition
19 end
20 end
3.1 Vote Image Creation
First part of our method is the vote space and vote
image creation (lines 9 and 10 of Algorithm 1). Vote
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
254

space consists of multiple dimensions: X, Y, Scale,
Rotation and Distance. Each vote contains specific
X and Y position of the center of the object. The
Distance may be the result of using specific metric
for particular feature points. For SIFT the standard
procedure is to use L2 distance for its feature vector,
which contains gradient data in the area around the
characteristic point. One may use some additional in-
formation in distance calculation, as color difference.
Someone can use ranking method as the LSH hashing
instead of the L2 metric as well.
Vote image is the projection of the adjacency data
available in vote space onto X and Y dimensions.
Vote image has one intensity channel, created by
normalizing adjacency sum cue. Another approach
would be to use the distance value instead of adja-
cency as the main cue. We found L2 metric, as well
as many other distance-based approaches, as insuffi-
cient.
Votes in the vote spaces are built upon filtered cor-
respondence sets. The distance threshold used in line
5 of Algorithm 1 was calculated as:
thr =
MIN(V ) + MAX(V )
2
, (1)
where V is the votes group and the MIN and MAX
operators return the value of a vote with minimal and
maximal distance value from the group. The rejection
function D is presented in equation 2.
D(v) =
accept, dist(v) ≤ thr
re ject, dist(v) > thr
. (2)
We transform distance value into normalized adja-
cency value in range from 0 to 1 (line 7 of Alg. 1). 1
indicates perfect match. 0 indicates near to rejection
difference between feature points. We transformed
distance values into adjacency (adj) values with a spe-
cific function:
adj(v) = 1 −
dist(v)
thr
2
. (3)
Adjacency values are gathered in a single chan-
nel, gray vote image. Vote image can be optionally
normalized for visualization purposes. Such normal-
ized image has been shown in Figure 1. If the feature
extraction and matching process are highly discrim-
inative, the object instances in the scene should be
recognizable by a human. Manual verification of vote
image gives some level of valuable insight into votes
intersperse in the image and a level of a false votes
groupings recognizable by a human.
Last step of Algorithm 1 is the search for propo-
sitions in a vote image. Proposition is a point in
the vote image and corresponding part of vote space,
where the potential object’s center is located. We used
Good Features To Track by Tomasi and Shi (Shi and
Tomasi, 1994) to detect multiple local maximas in the
vote image and used them as the propositions. The
number of propositions should be much higher than
a number of objects in the image. It is trivial to set
the Good Features To Track to find all the important
points in the image, but it leads to generation of thou-
sands of propositions. Number of propositions will
significantly impact the algorithm’s processing time,
so it is not possible to ignore the need for a trade-off
in detector’s parameter adjustment. For each propo-
sition’s X and Y position the adjacency sum for cor-
responding votes in vote space is calculated and used
for sorting purposes in line 12. The highest adjacency
value proposition should be the first taken later into
a vote aggregation process. As the adjacency sum is
proportional to the channel value in the vote image,
the cue for sorting stage is easy to compute. Sort-
ing the propositions ensures, that the strongest vote
grouping will be processed first. In case of the posi-
tive object recognition, the vote data corresponding to
object’s detection area will be erased from vote space
and image.
3.2 Vote Aggregation
Second part of our approach contains a vote aggre-
gation mechanism. Vote aggregation starts from a
proposition’s position, which should be the center of
a local vote grouping in the vote image. Data of the
vote groupings can significantly vary for different ob-
ject instances in the scene. The best instances can be
represented by hundreds of votes, when the weakest
positive object response can be connected with only
a few. Generic clustering may ignore such clusters
and merge it with the bigger ones. Generic clustering
algorithms has generic parameters, that are hard to ad-
just with object-oriented logic or even intuition. Some
clustering approaches tend to cluster all the available
vote data, even if the noise (false correspondences)
fills most of the vote space.
We propose an iterative 2-pass vote aggregation
process for selective clustering purposes. In each
pass the unique filtering and the cascade filtering take
place, which reject false positive detections. Two pass
design prevents situations in which aggregation area
contains multiple objects. Pass one of the aggregation
collects all the votes in local area of proposition’s po-
sition (line 2 of Alg. 2). The size of a local area may
be a function of a corresponding pattern size. After
gathering of all the votes in the local area, the unique
filtering is performed and the resulting group of votes
RobustMethodofVoteAggregationandPropositionVerificationforInvariantLocalFeatures
255

(a) Vote image (b) Blurred and normalized vote image
(c) Scene with tea detections
Figure 1: Sample of vote image generated while localizing red, herbal tea casing.
is tested with a cascade of filters (lines 3 and 4 of Alg.
2).
In the second pass of the process the aggregation is
conducted with Flood Fill algorithm, starting from the
proposition’s position (line 7 of Alg. 2). The Flood
Fill range is limited to a scaled down object’s area.
Such limitation can be constructed with a scale and
rotation estimation from the first pass of the aggre-
gation. The limitation ensures, that the aggregation
process will not collect the votes from neighbouring
object instances. Second pass of the algorithm con-
tains unique filtering and cascade filtering as well, as
the vote collection may be different in this pass.
For each group of votes, a unique filtering should
be performed in each pass (lines 3 and 8 of Alg.
2). Unique filtering preserves only one vote with the
highest adjacency corresponding to the same feature
point in the pattern. We can do so, because we want
the aggregated votes to be connected with only one
object. If multiple votes are connected with one spe-
cific feature in the pattern we can assume that only the
strongest vote isn’t the noise.
Most of the feature point detectors incorporate
mechanisms of rejecting the points located along the
edges. Unfortunately, this mechanisms work only in a
micro scale. In high resolution some graphical struc-
tures, that for human seem as a straight edge, has
a very complicated, uneven shape for characteristic
points detector. Characteristic points located along
the edges have similar features, so may be matched
with the same feature in the pattern. It leads to gen-
eration of many false propositions, which can some-
times be accepted by a cascade filters.
Some of the false positive detections in our ex-
periments were initiated as a bunch of feature points
placed along a simple, steep gradients and edges. For
instance, when the scene presented product shelves,
more than a half of false detections contained edge
of the shelf near the center and its vote data present
mostly along the shelf’s edge.
3.3 Cascade Filtering
Cascade filtering (lines 4 and 9 of Alg. 2) is a pro-
cess of validating vote group with a cascade of fil-
ters. Each filter can accept aggregated votes or reject
them. Any rejection will result in dropping the aggre-
gation process and removing the processed proposi-
tion from the propositions sorted queue. No vote data
is removed from vote space or vote image in that sit-
uation. If all the filters in first pass accepts the vote
group, process may estimate the size and rotation of
the object represented by the majority of votes (line
11 of Alg. 2).
Cascade filters comprise of: (1) vote count thresh-
olding, (2) adjacency sum thresholding, (3) scale vari-
ance thresholding, (4) rotation variance thresholding,
(5) feature points binary test, (6) global normalised
luminance cross correlation thresholding. First pass
of the vote aggregation uses filters: (1), (2), (3) and
(4). Second pass of the process uses filters: (3), (4),
(5) and (6).
Vote count thresholding is a simple filter, thresh-
olding number of votes in the aggregated group.
Lowe in his work (Lowe, 2004) proposed generalised
Hough transform for object detection. In this method
he has assumed that only three votes are enough to
identify the object. Unfortunately, such assumption
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
256

leads to many false positive detections. Three local
features are not enough to describe complex, generic
graphics. We tested vote count thresholding for val-
ues from 3 up to 20. We found 6 as the optimal value
for filtering out too weak responses. If the vote group-
ing represents real object instance and has less than 6
votes, it means that the prior algorithm processes has
too low effectiveness.
Adjacency sum thresholding rejects all the groups
of votes with sum of adjacency values less than a
threshold value. This filter in certain circumstances
can be used instead of the vote count thresholding.
Nevertheless the rejection data from these two filters
may give an insight into vote certainty levels of the
detection. Even huge vote groupings with more than
100 votes may have a very low adjacency sum value.
Scale variance thresholding rejects all the groups
of votes with a scale value variance higher than the
threshold value. One may rebuild this filter into mech-
anism separating noise signal from positive detection
signal with a Gaussian model. For our purposes such
method is computationally too expensive. Simple
variance thresholding rejects many false detections
and is easy to compute.
Rotation variance thresholding rejects all the
groups of votes with rotation value’s variance higher
than the threshold value. Rotation variance threshold-
ing works analogically to scale variance thresholding
but using the rotation values. A rotation variance is
not straightforward to compute. We set twelve buck-
ets for rotation values and choose the three buckets
with the highest count number. Its resultant was taken
as an average rotation. All the values has been rotated
so the average rotation was assigned to 180 degrees.
Then the variation in regards to 180 degrees has been
computed and used for thresholding.
Feature binary test uses feature points correspon-
dence data preserved in each vote. We created mul-
tiple luminance binary tests for random feature pairs
in the scene, which are represented by votes in aggre-
gated votes group. We created identical tests for cor-
responding feature points on the pattern side. Each
set of binary tests provided a binary string that can be
compared with a hamming distance. The normalised
distance can be thresholded.
Normalised luminance cross correlation is used as
a last filter. It needs the exact object’s graphics patch
extracted from the scene. It’s computationally expen-
sive, but can filter out many false positive detections,
that cannot be filtered by previous filters. The im-
ages are resized to the size of 50x50 pixels before the
calculation of the cross correlation. The filtering is
conducted only in the second pass of the aggregation
process, where the theoretical object’s frame can be
calculated from the data from the first pass.
4 EXPERIMENTS
Our testing platform, incorporating method described
in this paper, has been developed to search product lo-
gos and casings on scenes presenting market shelves
and displays. The database used for the test for this
paper consists of 120 shelf photos taken in 12MPx
resolution and scaled down to 3MPx for testing pur-
poses. The pattern group consist of 60 generic pat-
terns of logos and product wrappings. Each shelf
photo was tested with each one of the patterns, giving
7200 detection processes. The photos contained usu-
ally three classes of products so most of the patterns
could generate only false positive detections. Aver-
age number of products presented in the scenes was
emph23.6. Patterns were scaled to have the bigger
size between 512 and 256 pixels. In the application
of product search on the market shelves we describe
high quality images as photos bigger than 2MPx, with
a minimum of ten thousands pixels for the smallest
searched object and all of the logos text readable for
a human. Our aggregation approach bases its effec-
tiveness upon chosen local features. We used SIFT
implementation for main experiments. Main advan-
tage of our method lays in filtering out false detec-
tions and processing all possible occurrences. SIFT is
a state-of-the-art features detector and descriptor. Our
test showed that 100% of the actual object instances
were processed through our cascade filtering with a
proper proposition’s location. That’s thanks to dense
proposition detections and a straightforward vote im-
age creation.
Detection effectiveness lays in proper vote group
filtering. Amount of positive detections rejected dur-
ing cascade filtering results from all the computer
vision algorithms incorporated into detection system
and can be hardly used to measure aggregation ef-
fectiveness without proper comparisons with similar
methods in the same application field. False detection
rate yields more analytical data. We found no false
positive detections during our tests, that were fault
of not sufficient description capability of feature de-
scriptor. All of false detections were the result of too
loose parameters, that were needed for very high pos-
itive detection rate. Nevertheless we came across 203
false detections in 129 of 7200 detection processes,
resulting in more than 1% (Table 1) false detection
chance per detection process. This result seems low,
but at the same time means emph66.2% chance, that
the false detection will take place when looking for
any product instance from our patterns database.
RobustMethodofVoteAggregationandPropositionVerificationforInvariantLocalFeatures
257
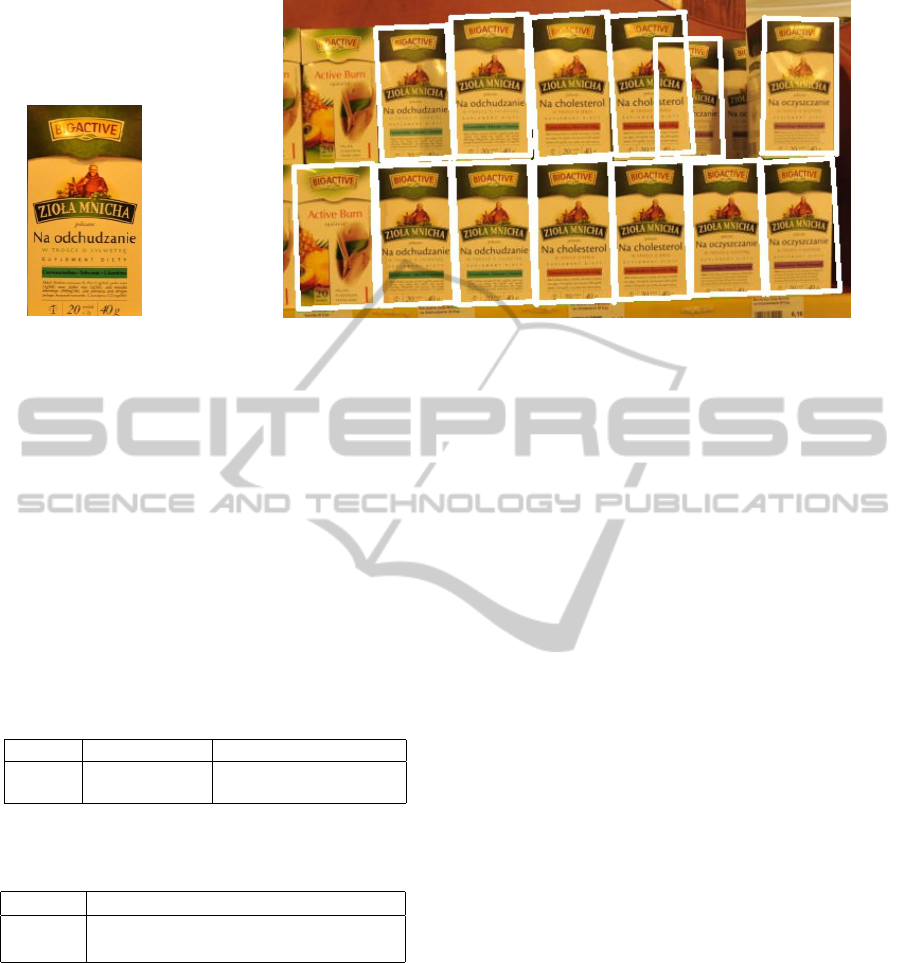
(a) Pattern
(b) Scene
Figure 2: Sample of detection results.
Our method has been compared to the method us-
ing the HOG descriptor. For the training stage we
generated set of 60 derivative images for each pat-
tern through small affine transformations. We used
all other patterns as a negative images. We used im-
plementation of HOG method, called Classifier Tool
For OpenCV and FANN (HOG, 2014). Our method
achieved only slightly better detection rate, but sig-
nificantly lower chance for false detections. The aver-
age number of false detections were almost two times
higher for the HOG approach (Table 2).
Table 1: Detection rate and false detection chance for our
tests.
Method Detection Rate False Detection Chance
Ours 81.3% 1.79%
HOG 73.6% 21.42%
Table 2: Average number of false detections for process,
where the false detection occurred.
Method Average Number of False Detections
Ours 1.57
HOG 3.18
During experiments with product casings we en-
countered number of problems with association of
detections to a specific result group. Some prod-
ucts are very similar, with only slight local graphi-
cal differences. This is particularly true for the same
brand with different aromas or casing sizes. Figure 2
presents one of such cases, where tea casing has iden-
tical logo for its few variations with one being visu-
ally very different from the others. We decided to in-
terpret only the visually off tea as a false detection.
In retail field the rest of the detections should be pro-
cessed further to discriminate different variations of
the products. One can use partial patterns with a bag-
of-words approach on top of our aggregation method
to do so.
5 CONCLUSIONS
In this paper the method of vote aggregation designed
for use in multi-object multi-detection systems has
been introduced. Aggregation process yields promis-
ing results in tests, leading to analysis of each poten-
tial object in the image. The unique filtering leaves
out many false object occurrence propositions and the
cascade filtering rejects most of the false positive de-
tections, that is crucial for presented application. Sys-
tem built upon the aggregation method can achieve
more than 80% detection rate with the false detection
chance below 2%. It is still far from industrial stan-
dards, but there are many places for improvement as
well.
Presented method is designed to analyze very high
quality images. Images processed in tests were taken
by a hand, resulting in high amount of blurred and
skewed visual data. The method of image acquisition
should be analyzed further. In future work we will
incorporate estimates of the best parameters for pre-
sented method as well as solve simple parametriza-
tion dependencies. We are going to test the system
with a two-phase approach, where second phase of
the detection would use the patterns extracted directly
from the scene. The pattern size has too much impact
on the detection rate, as the feature points approach
works the best, when the objects in the scene and in
pattern images have the same size. We are going to
evaluate resizing options for better detection results.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
258

ACKNOWLEDGEMENTS
This work was co-financed by the European Union
within the European Regional Development Fund.
REFERENCES
(2014). Classifier tool for opencv and fann v. 4.11.8.
http://classifieropencv.codeplex.com/. Accessed:
2014-12-18.
Alahi, A., Ortiz, R., and Vandergheynst, P. (2012). FREAK:
Fast retina keypoint. In Computer Vision and Pat-
tern Recognition (CVPR), 2012 IEEE Conference on,
pages 510–517.
Azad, P., Asfour, T., and Dillmann, R. (2009). Combin-
ing Harris interest points and the SIFT descriptor for
fast scale-invariant object recognition. In Intelligent
Robots and Systems, 2009. IROS 2009. IEEE/RSJ In-
ternational Conference on, pages 4275–4280.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008).
Speeded-up robust features (SURF). Computer Vision
and Image Understanding, 110(3):346 – 359. Simi-
larity Matching in Computer Vision and Multimedia.
Blaschko, M. and Lampert, C. (2008). Learning to localize
objects with structured output regression. In Forsyth,
D., Torr, P., and Zisserman, A., editors, Computer Vi-
sion ECCV 2008, volume 5302 of Lecture Notes in
Computer Science, pages 2–15. Springer Berlin Hei-
delberg.
Calonder, M., Lepetit, V., Strecha, C., and Fua, P. (2010).
BRIEF: Binary robust independent elementary fea-
tures. In Daniilidis, K., Maragos, P., and Paragios,
N., editors, Computer Vision ECCV 2010, volume
6314 of Lecture Notes in Computer Science, pages
778–792. Springer Berlin Heidelberg.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893 vol. 1.
Felzenszwalb, P., Girshick, R., McAllester, D., and Ra-
manan, D. (2010). Object detection with discrim-
inatively trained part-based models. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
32(9):1627–1645.
Iwanowski, M., Zieli
´
nski, B., Sarwas, G., and Stygar, S.
(2014). Identification of products on shop-racks by
morphological preprocessing and feature-based detec-
tion. In Chmielewski, L., Kozera, R., Shin, B.-S.,
and Wojciechowski, K., editors, Computer Vision and
Graphics, volume 8671 of Lecture Notes in Computer
Science, pages 286–293. Springer International Pub-
lishing.
Ke, Y. and Sukthankar, R. (2004). PCA-SIFT: a more
distinctive representation for local image descriptors.
In Computer Vision and Pattern Recognition, 2004.
CVPR 2004. Proceedings of the 2004 IEEE Computer
Society Conference on, volume 2, pages II–506–II–
513 Vol.2.
Kurzejamski, G., Zawistowski, J., and Sarwas, G. (2014).
Apparatus and method for multi-object detection in a
digital image. EU Patent 14461566.3.
Lampert, C. H., Blaschko, M., and Hofmann, T. (2008). Be-
yond sliding windows: Object localization by efficient
subwindow search. In Computer Vision and Pattern
Recognition, 2008. CVPR 2008. IEEE Conference on,
pages 1–8.
Leutenegger, S., Chli, M., and Siegwart, R. (2011). BRISK:
Binary robust invariant scalable keypoints. In Com-
puter Vision (ICCV), 2011 IEEE International Con-
ference on, pages 2548–2555.
Lowe, D. (1999). Object recognition from local scale-
invariant features. In Computer Vision, 1999. The Pro-
ceedings of the Seventh IEEE International Confer-
ence on, volume 2, pages 1150–1157 vol.2.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. volume 60, pages 91–110.
Kluwer Academic Publishers.
Morel, J.-M. and Yu, G. (2009). ASIFT: A new framework
for fully affine invariant image comparison. SIAM J.
Img. Sci., 2(2):438–469.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). ORB: An efficient alternative to SIFT or
SURF. In Computer Vision (ICCV), 2011 IEEE In-
ternational Conference on, pages 2564–2571.
Sarwas, G. and Skoneczny, S. (2015). Object localization
and detection using variance filter. In Chora
´
s, R. S.,
editor, Image Processing & Communications Chal-
lenges 6, volume 313 of Advances in Intelligent Sys-
tems and Computing, pages 195–202. Springer Inter-
national Publishing.
Shi, J. and Tomasi, C. (1994). Good features to track. In
Computer Vision and Pattern Recognition, 1994. Pro-
ceedings CVPR ’94., 1994 IEEE Computer Society
Conference on, pages 593–600.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Computer Vi-
sion and Pattern Recognition, 2001. CVPR 2001. Pro-
ceedings of the 2001 IEEE Computer Society Confer-
ence on, volume 1, pages 511–518.
Yeh, T., Lee, J., and Darrell, T. (2009). Fast concurrent ob-
ject localization and recognition. In Computer Vision
and Pattern Recognition, 2009. CVPR 2009. IEEE
Conference on, pages 280–287.
Zickler, S. and Efros, A. (2007). Detection of multiple de-
formable objects using PCA-SIFT. In Proceedings
of the 22Nd National Conference on Artificial Intelli-
gence - Volume 2, AAAI’07, pages 1127–1132. AAAI
Press.
Zickler, S. and Veloso, M. M. (2006). Detection and local-
ization of multiple objects. In Humanoid Robots, 2006
6th IEEE-RAS International Conference on, pages
20–25.
RobustMethodofVoteAggregationandPropositionVerificationforInvariantLocalFeatures
259
