
Reliable Image Matching using Binarized Gradient Features Obtained
with Multi-flash Camera
Yasunori Sakuramoto
1
, Yuichi Kanematsu
2
, Shuichi Akizuki
1
, Manabu Hashimoto
1
,
Kiyotaka Watanabe
3
and Makito Seki
3
1
Graduate School of Computer and Cognitive Sciences, Chukyo University,
101-2, Yagoto-Honmachi, Showa-ku, Nagoya, Aichi, Japan
2
School of Information Science and Technology, Chukyo University,
101-2, Yagoto-Honmachi, Showa-ku, Nagoya, Aichi, Japan
3
Advanced Technology R&D Center, Mitsubishi Electric Corporation,
8-1-1, Tsukaguchi-Honmachi, Amagasaki, Hyogo, Japan
Keywords:
Object Detection, Binarized Gradient Features, Image Matching, Texture-less, Binary Code.
Abstract:
In this paper, we propose an object detection method using features describing information about a concavo-
convex shape of an object that are obtained by using a small camera that controls the illumination direction. A
feature image containing information about the shape of the object is generated by integrating images obtained
by turning on, one by one, light emitting diodes (LEDs) annularly arranged around the camera. Our method
can reliably detect a texture-less object by using this feature image in the matching process. Experiments
using 200 actual images confirmed that the method achieves a 97.5% recognition success rate and a 4.62 sec
processing time.
1 INTRODUCTION
Object detection using an image sensor is a useful
technique in factory production systems. Most ob-
jects handled in a production system are intermediate
workpieces having a slightly concavo-convex shape
and few surface patterns such as characters or de-
signs. Therefore, a practical object detection method
that can be utilized for low-texturedobjects is desired.
Some object detection methods use edge pixels
(Barrow et al., 1977) or distinctive pixels (Hashimoto
et al., 2010) in the template image for detecting ob-
jects in general. These methods achieve reliable de-
tection by analyzing the distinctiveness of the tem-
plate image. They are also able to detect objects at
high speed by using a small number of pixels in the
matching process. For low-textured images, however,
their detection performance is low since it is difficult
for them to obtain effective pixels for matching.
To address this issue, in recent years keypoint-
based matching methods such as SIFT (Lowe, 2004),
SURF (Bay et al., 2006), and ORB (Rublee et al.,
2011) have been proposed. However, these methods
describe features on the basis of gradient distribution
in the neighborhood of the key points, so it is difficult
for them to describe effective features for matching
with low-textured images. Therefore, there is con-
cern that their detection performance will be lowered
as well.
Three robust approaches for low-textured images
that have been reported are the DOT method (Hinter-
stoisser et al., 2010) which uses the main gradient di-
rection in local regions, the BOLD method (Tombari
et al., 2013) which uses line segments of edge, and
an object detection method (Akizuki and Hashimoto,
2013) using pixel pairs that are selected optimally in
accordance with the intensity of the edge in the tem-
plate image. However, if the surface of object is only
slightly concavo-convex in shape, it is extremely dif-
ficult to obtain shading information about the surface.
Since this information is an important clue in image
matching, it is difficult for these methods to detect ob-
jects with sufficient accuracy.
The purpose of this research is to achieve a
method that detects objects reliably even if the sur-
face of the object has few or no patterns, which are
important clues in image matching. We believe that if
a concavo-convexshape of the object can be captured,
it will be possible to detect an object even if its sur-
face has few or no patterns. To achieve our purpose
we propose an object detection method using features
260
Sakuramoto Y., Kanematsu Y., Akizuki S., Hashimoto M., Watanabe K. and Seki M..
Reliable Image Matching using Binarized Gradient Features Obtained with Multi-flash Camera.
DOI: 10.5220/0005267902600264
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 260-264
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
that describe the information about a concavo-convex
shape of the object. The features are obtained by us-
ing a small camera that can control the illumination
direction.
Using a multi-flash camera (MFC) (Raskar et al.,
2004) with light emitting diodes (LEDs) annularly ar-
ranged around the camera, we obtain images by turn-
ing on the LEDs one by one. We consider that with
these images, input images and template images are
very similar at correct matching positions because
they reflect the concavo-convex shape of the object
for each illumination direction. Therefore, a reliable
object detection method is achieved by using the im-
ages obtained with the MFC in the matching process.
Moreover, the processing cost for matching can be re-
duced by integrating these images into a feature im-
age that describes the information about the concavo-
convex shape of the object.
Our method can also reliably detect texture-less
target objects by using this feature image in the
matching process.
In addition to the above mentioned methods, there
are other methods (Hinterstoisser et al., 2012; Drost
and Ilic, 2012) that use a 3-D sensor to obtain the
concavo-convex shape of the object. However, while
the sensor is quite a large device, the MFC we use is a
compact device and thus is considered to be practical.
In the rest of this paper, section 2 describes the
proposed object detection method and its use of the
binary gradient features based on gradient informa-
tion, section 3 presents experimental results to con-
firm the effectiveness of our method, and section 4
concludes the paper with a summary of key points.
2 THE PROPOSED METHOD
2.1 Basic Idea
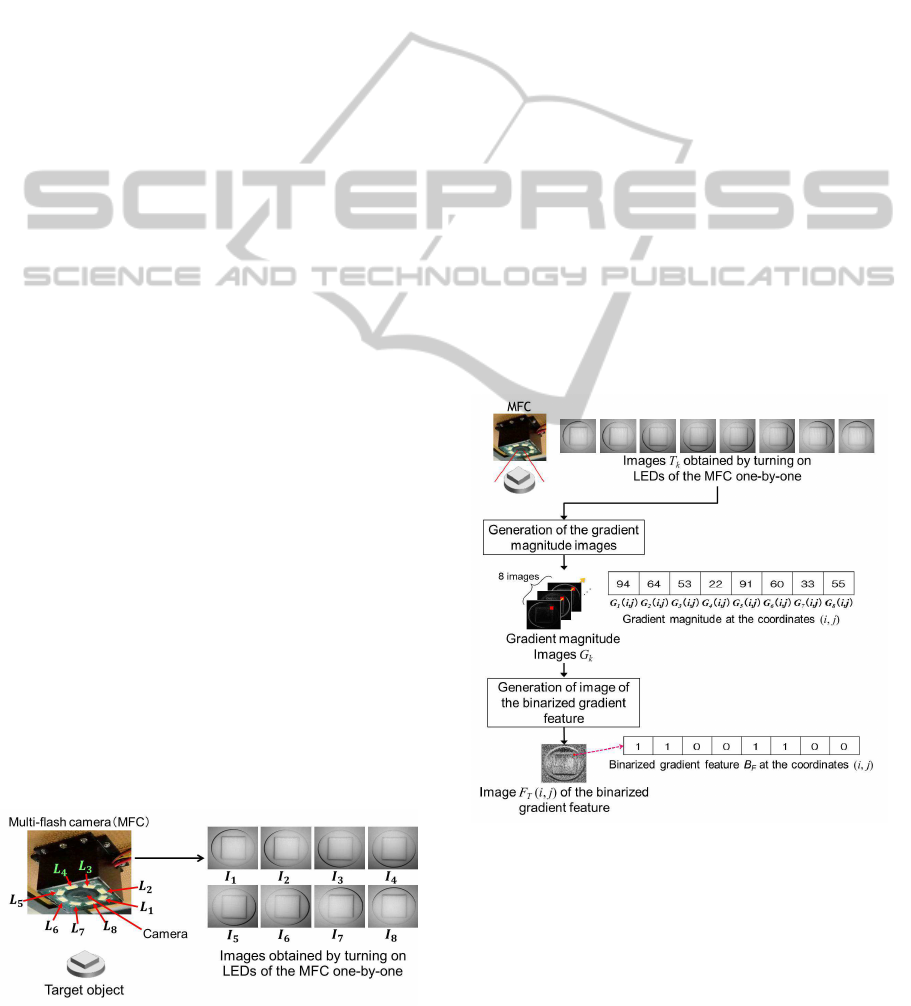
The basic idea of our work is to use images obtained
by turning on, one by one, N LEDs (in this research,
N=8) of the MFC that Rasker et al. proposed (Figure
1).
Figure 1: Example images obtained from the MFC.
These images contain details about the concavo-
convex shape (e.g., horizontal and vertical edges)
that are emphasized in each illumination direction.
In other words, they contain pseudo-3-D informa-
tion. Therefore, an object that has few or no sur-
face patterns can be detected by using these images,
for which there is very high similarity between in-
put images and template images at correct matching
positions. However, the problem is that the process-
ing cost is increased when the eight images obtained
from the MFC are used in the matching process. In
this research, we were able to reduce the process-
ing cost in matching by integrating the eight images
into a feature image that has the information about the
concavo-convex shape of the object. This is because
the integration makes it possible to achieve match-
ing based on the pseudo-3-D information with a small
amount of calculation.
2.2 Binarized Gradient Features based
on Gradient Information
This section explains how we integrate the images ob-
tained from the MFC into a feature image. Figure
2 shows the process for extracting binarized gradient
features.
Figure 2: Method for extracting binarized gradient features.
Images T
k
(k = 1,2,...,8) are obtained by turning
on the LEDs of the MFC one by one, and images
G
k
(k = 1,2,...,8) of the gradient magnitude are gen-
erated from these images. The feature B
F
of each
pixel is described as an 8-bit code using a gradient
image G
k
. The method of generating an image of the
binarized gradient feature is to compare the gradient
ReliableImageMatchingusingBinarizedGradientFeaturesObtainedwithMulti-flashCamera
261

magnitudes of eight images at the same pixel. Next,
the 8-bit binary code is described by assigning 1 bit
for the four highest gradient magnitudes and 0 bits
for the four lowest. The image F
T
is generated by
the binarized feature B
F
of all pixels in the image.
The processing cost of matching can be reduced by
integrating the eight images into a feature image and
designing a feature as the binary code.
2.3 Image Matching using the Binarized
Gradient Features
This subsection explains a matching method we pro-
pose that uses the above mentioned binarized gradient
features. Figure 3 shows a schematic diagram of the
proposed algorithm.
Figure 3: Schematic diagram of the proposed algorithm.
The proposed algorithm consists of template gen-
eration and image matching steps.
In template generation, the binarized gradient fea-
tures are generated by the above described method,
i.e., using template images obtained by turning on the
LEDs of the MFC one by one. The image of the gen-
erated binarized gradient features is the template.
In the image matching process, the image F
I
(i, j)
of the binarized gradient features is generated in the
same way as the template. Next, the template scans
the input image in the same way as in conventional
template matching, and the position of the maximum
similarity in the input image is detected as the final
output. The high-speed matching is achieved by us-
ing the Hamming distance between the input image
features and the template in the similarity calculation.
In this way, the proposed method is able to detect
a texture-less object by using the binary features that
reflect the concavo-convex shape of the object.
3 EXPERIMENTS AND
DISCUSSION
3.1 Performance Comparison of
Proposed Method and Other
Methods
This section explains the results we obtained in com-
paring the performance of our method with that of
other methods. We used the following four methods
as comparative methods.
(1) ZNCC: The Zero-mean Normalized Cross-
Correlation method, which uses all pixels.
(2) Chamfer Matching (Barrow et al., 1977): A
method in which edge pixels in the template im-
age are used.
(3) SURF (Bay et al., 2006): A method in which the
SIFT keypoints are used.
(4) OCPTM (Akizuki and Hashimoto, 2013): A
method using pixel pairs that are selected opti-
mally in accordance with the intensity of the edge
in the template image.
We used 50 images taken of four objects (Figure 4)
whose surfaces have different concavo-convex shapes
in the experiment.
Figure 4: The four types of objects used in the experiment.
Figure 5 shows example feature images generated
by the proposed method. While it is difficult to distin-
guish the objects in the grayscale images, it is easy to
distinguish those in the feature images.
Table 1 shows recognition success rate P
r
[%] and
processing time for matching T[sec] of each method.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
262

Figure 5: Image of the binarized gradient features generated
by the proposed method.
The recognition success rate is defined by the value P
r
(the number of successfully matched images within
accuracy of ±2 pixels) / the total number of images
× 100. It should be noted that the comparative meth-
ods used images taken under environment light con-
ditions.
Table 1: Recognition success rate and processing time for
each method.
Method M [pixels] P
r
[%] T [sec]
(1) ZNCC 10,000 22 2.13
(2) Chamfer Matching 230 18 0.07
(3) SURF 9 [points] 0 0.18
(4) OCPTM 500 20 0.21
(5) Proposed method 10,000 94 4.62
(CPU: Intel
R
CORE
TM
i5-2.50GHz, RAM: 4GB)
The proposed method achieved a 94% recognition
success rate, considerably higher than the rates the
comparative methods achieved. The comparative
methods achieved much lower rates because it is diffi-
cult for them to distinguish a target object from other
objects in grayscale images. On the other hand, the
proposed method is able to detect target objects that
do not have a surface pattern by using the features that
reflect the concavo-convex shape of the object.
3.2 Evaluation of recognition
Performance for Various Images
To test the general applicability of the proposed
method, we performed matching experiments with 50
input images of each of three different types. The in-
put image size was 640 pixels by 480 pixels. Figure
6shows the feature images of each object and their
feature images, and Table 2 shows the recognition
success rate achieved for each object. With regard
to the experiment conditions, the ZNCC method and
the proposed method used all pixels in the template
image and the OCPTM method used pixels selected
by the parameters described in reference (Akizuki and
Hashimoto, 2013).
Figure 6: Example input grayscale images [(a), (b), and (c)]
and images of binarized gradient features [(a’), (b’), and
(c’)]. Images enclosed in red frames are template images.
Table 2: Recognition success rate achieved for various ob-
jects.
Method
Plastic parts Metal plates Printed board
P
r
[%] P
r
[%] P
r
[%]
ZNCC 58 58 100
OCPTM 84 98 100
Proposed method 100 98 98
The proposed method achieved a high (more than
98%) recognition success rate for all objects. On av-
erage this was 5% higher than that of the previous
OCPTM method. These results confirm the proposed
method has high general applicability.
ReliableImageMatchingusingBinarizedGradientFeaturesObtainedwithMulti-flashCamera
263
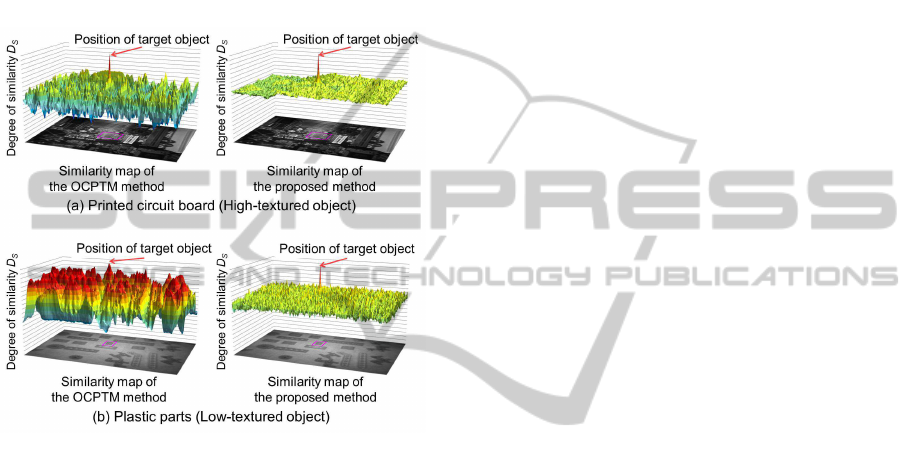
3.3 Similarity Map Analysis
We confirmed the effectiveness of the binarized gra-
dient features by analyzing the similarity map ob-
tained for the proposed method. The experimental
images used were images of the printed circuit board
and plastic parts shown in Figure 6. The compari-
son method used was the OCPTM method. Figure 7
shows the similarity maps obtained for the proposed
method and the OCPTM method.
Figure 7: Similarity maps obtained for the proposed method
and the OCPTM method.
In a high-textured object (the printed circuit
board), the similarity maps obtained by the two meth-
ods showed a sharp peak at the position of the target
object. However, in low-textured objects (the plas-
tic parts), the similarity map of the OCPTM method
showed a high degree of similarity in positions other
than the position of target object, while the score map
of the proposed method showed a high degree of sim-
ilarity only in the position of target object. These re-
sults confirmed the effectiveness of the binarized gra-
dient features.
4 CONCLUSION
We have proposed binarized gradient features that re-
flect the concavo-convexshape of an object and an ob-
ject detection method using these features. By using
the features in the matching process, we confirmed
that our method is able to achieve reliable object de-
tection even if a target object is low-textured. Ex-
periments using 200 actual images confirmed that our
method achievesa 97.5% recognition success rate and
a 4.62 sec processing time. In future work, we will at-
tempt to even further speed up the processing time.
REFERENCES
Akizuki, S. and Hashimoto, M. (2013). Robust match-
ing for low-texture images based on co-occurrence of
geometry-optimized pixel patterns. In Proc. QCAV,
pages 113–116.
Barrow, H., Tenenbaum, J., Bolles, R., and Wolf, H. (1977).
Parametric correspondence and chamfer matching:
Two new techniques for image matching. In Proc. of
IJCAI, pages 659–663.
Bay, H., Tuytelaars, T., and Gool, L. (2006). Surffspeeded
up robust features. In Proc. of ECCV, pages 404–417.
Drost, B. and Ilic, S. (2012). 3d object detection and local-
ization using multimodal point pair features. In Proc.
3DIMPVT, pages 9–16.
Hashimoto, M., Fujiwara, T., Koshimizu, H., Okuda, H.,
and Sumi, K. (2010). Extraction of unique pix-
els based on co-occurrence probability for high-speed
template matching. In Proc. of ISOT, pages 1–6.
Hinterstoisser, S., Cagniart, C., Ilic, S., Sturm, P., Navab,
N., Fua, P., and Lepetit, V. (2012). Gradient response
maps for real-time detection of texture-less objects. In
IEEE Trans. on PAMI, pages 876–888.
Hinterstoisser, S., Lepetit, V., Ilic, S., Fua, P., and Navab,
N. (2010). Dominant orientation templates for real-
time detection of texture-less objects. In Proc. CVPR,
pages 2257–2264.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. In IJCV, volume 60, pages 91–
110.
Raskar, R., Tan, K., Feris, R., Yu, J., and M.Turk (2004).
Non-photorealistic camera: Depth edge detection and
stylized rendering using multi-flash imaging. In ACM
Trans. on Graphics, volume 23, pages 679–688.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). ORB : An efficient alternative to SIFT or
SURF. In Proc. of ICCV, pages 2564–2571.
Tombari, F., Franchi, A., and Stefano, L. D. (2013). Bold
features to detect texture-less objects. In Proc. of
ICCV, pages 1265–1272.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
264
