
Direct and Inverse Models of Human Arm Dynamics
Andr´e Ventura
1
, In´es Tejado
2
, Duarte Val´erio
1
and Jorge Martins
1
1
IDMEC, Instituto Superior T´ecnico, Universidade de Lisboa, Lisboa, Portugal
2
Industrial Engineering School, University of Extremadura, Badajoz, Spain
Keywords:
Human Arm Models, Surgical Robots, Fractional Calculus, Neural Networks.
Abstract:
This paper uses experimental data to model the human arm at the elbow joint. Direct models have been pub-
lished before; this papers addresses inverse models (i.e. relating the force at the hand with the arm angle).
Models used were integer, fractional commensurable and fractional non-commensurable order transfer func-
tions, as well as neural networks (used as a term of comparison). Results show the superiority of fractional
models, simpler, more exact, and with less parameter uncertainty.
1 INTRODUCTION
Dynamic models for the human arm are needed to
replicate its behaviour by a robot (Ta¨ıx et al., 2013;
Fu and Cavusoglu, 2012). And controlling a robotic
arm so that it will behave as much as possible as a
human arm is no idle experience. It seems to be a
good option for surgical robots (Park et al., 2006).
Such robots can achieve, if properly designed, per-
formances with an accuracy that represent a valuable
assistance even to the most seasoned surgeons. But,
for this to happen, the surgeon has to be comfortable
working with the robot, and that is where the repli-
cation of a human arm comes in. A robot that feels
more like another person’s hand has shown to be a
better companion than a robot with some other type
of behaviour.
Third-order linear models are a usual assumption
for this system; experimental data can be reasonably
fitted, and there is furthermore a very reasonable ra-
tionale argument in favour of this structure, shown in
Figure 1. More accurate results can be obtained with
more complicated identification techniques and struc-
tures (Adewusi et al., 2012; Nagarsheth et al., 2008;
Mobasser and Hashtrudi-Zaad, 2006; Venture et al.,
2006); whether this pays off or whether the simpler
linear option is better because it is good enough de-
pends, of course, on the intended use.
In a previous paper we presented fractional order
linear models for the human arm, obtained from ex-
perimental data with the measured force at the hand
as model input and the measured arm angle as out-
put, and compared them with the above mentioned
third order models (Tejado et al., 2013). There are
reasons to expect this type of models here, because
the dynamics of muscles of several animal species
(including humans) have been modelled using frac-
tional derivatives (Sommacal et al., 2008; Sommacal
et al., 2007b; Sommacal et al., 2007a; Djordjevic
et al., 2003), and because muscles show viscoelastic
behaviour, that can also be modelled using fractional
derivatives (Mainardi, 2010; Magin, 2004). In their
turn, fractional derivatives are expectable here given
the fractal nature of muscular tissue.
In this paper, we present inverse (i.e. using now
the measured arm angle as model input and the mea-
sured force at the hand as output) models for the hu-
man arm, using the same data from (Tejado et al.,
2013), comparing fractional and third order (integer)
linear models with neural networks. Neural networks
provide nonlinear models that often obtain excellent
performances (Jang et al., 1997; Nørgaard et al.,
2003; Haykin, 1999): hence the pertinency of the
comparison with fractional models, to see if they can
stand the test. Parameter variability is checked and
held as an important indicator of model suitability.
The contents of the paper are as follows: section 2
explains how data was obtained, and section 3 which
models were used. Then, section 4 presents the re-
sults, and section 5 offers comments and conclusions.
2 EXPERIMENTAL DATA
As mentioned above, the experimental data is that of
(Tejado et al., 2013); further details can be got in that
156
Ventura A., Tejado I., Valério D. and Martins J..
Direct and Inverse Models of Human Arm Dynamics.
DOI: 10.5220/0005276701560161
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2015), pages 156-161
ISBN: 978-989-758-071-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
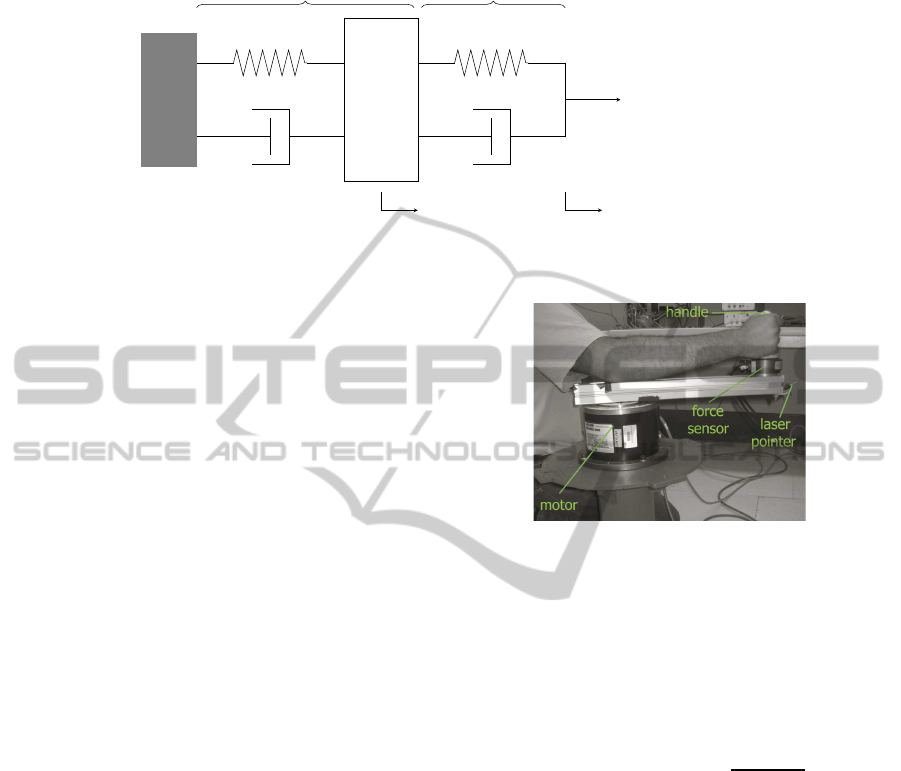
force applied
by motor
position measured
by motor encoder
(analogous with
motor angle)
position analogous
with elbow angle
model of the arm
(mass–spring–damper)
model of the hand
(spring–damper; mass
assumed neglectable)
Figure 1: Third order translation analog to elbow dynamics.
paper.
Nine female and nine male volunteers, with ages
ranging from 25 to 66, without any known musculo-
skeletal injuries of the higher limbs, kneeled or sat
holding a horizontal robotic arm and tried to keep it
steady, while it moved randomly. The robotic arm
was moved by a Kollmorgen direct drive D061M-
23-1310 motor, able to produce 5.3 N·m continuous
torque and 16.9 N·m peak torque, in current con-
trol mode. The rotation range was limited to ±0.9
rad for safety reasons. The measured angle was ob-
tained from an encoder with a resolution of 65, 535
pulses/revolution. At the end of the aluminium hori-
zontal robotic arm there was a handle for the volun-
teers to grab, a JR3 12-degree-of-freedomDSP-based
force sensor, and a laser pointer which should be kept
inside a target. Data was recorded with a 2 kHz sam-
pling frequency.
Experiments (shown in Figure 2), which lasted
40 s to avoid fatigue, could be of three types:
• Type I — Oscillations in both directions around
the zero-point;
• Type II — Oscillations only in the positive side of
the zero-point (flexion of the elbow);
• Type III — Oscillations only in the negative side
of the zero-point (extension of the elbow).
The oscillations were random to avoid anticipatory re-
flexes, which would interfere with the modelling of
the arm dynamics. So the forces generated by the
motor were a sum of sinusoids with frequencies in the
[0.12, 15] Hz range (chosen because the bandwidthfor
the human arm is approximated to 10 Hz), limited to
not exceed 4 N. Eight voluntaries of either sex per-
formed two experiment of type I, one experiment for
type II, and one experiment for type III (68 data sets
in total). The two other voluntaries performed 16 ad-
ditional experiments: six of type I, seven of type II,
and seven of type III. The force measured by the men-
Figure 2: Robotic arm used to obtain experimental data of
human arm dynamics (Tejado et al., 2013).
tioned sensor was practically identical to the force in-
put.
3 TYPES OF MODELS
This section describes which models were used to find
transfer function G
arm,inverse
(s) =
F
measured
(s)
θ(s)
, where θ
is the measured arm angle, F
measured
is the measured
force at the hand, and s is the Laplace transform vari-
able.
3.1 Third-order Integer Linear Models
These have already been mentioned in section 1, and
the reasoning behind their choice in Figure 1. The
identification methods were the same described below
for fractional transfer functions, restricting differenti-
ation orders to natural numbers.
3.2 Fractional Linear Models
If initial conditions are zero, fractional derivatives,
denoted by
0
D
α
t
, α ∈ R, have Laplace transforms
given by L [
0
D
α
t
f(t)] = s
α
F(s). Consequently, from
a differential equation with fractional derivatives,
DirectandInverseModelsofHumanArmDynamics
157

fractional transfer functions arise. Those in which all
orders share a least common multiple (the commensu-
rability order) are called commensurate. Commensu-
rate transfer functions with a commensurability order
of 1 are integer transfer functions. Interested readers
can find ample information on fractional derivatives
in several books and papers, among which (Val´erio
and S´a da Costa, 2013; Val´erio and S´a da Costa, 2011;
Podlubny, 1999; Miller and Ross, 1993; Samko et al.,
1993; Magin, 2004).
To identify a fractional transfer function from the
measured data, rather than using a method to do this
directly from a time response (Malti et al., 2008;
Val´erio and S´a da Costa, 2013), a frequency response
was estimated first (using Welch’s method on the fil-
tered output), and then Levy’s method was applied, as
this leads to less noisy results. Levy’s method fits to
frequency response G( jω
p
), p = 1, . . . , f, a commen-
surable fractional model with a frequency response
given by
ˆ
G( jω
p
) =
∑
m
k=0
b
k
( jω
p
)
kα
1+
∑
n
k=1
a
k
( jω
p
)
kα
=
N( jω
p
)
D( jω
p
)
(1)
minimising (G( jω)D( jω) − N( jω))
2
(which is eas-
ier than the more obvious alternative of minimising
G( jω) −
N( jω)
D( jω)
2
, which leads to a nonlinear prob-
lem). Commensurable orders of fractional models
were found sweeping the α ∈ [0, 2] range (outside
which no transfer function is stable) with a 0.1 step,
and keeping the α for which results are better, using
a heuristic which is better described below in section
4 after performance indexes are introduced. For more
details on identification procedures of transfer func-
tions for this plant, see (Tejado et al., 2013). Levy’s
method for fractional transfer functions is covered in
(Val´erio et al., 2008).
3.3 Neural Networks
The (artificial) neural network (NN) models used be-
low have a particular architecture—neural network
auto-regressive with exogenous inputs (NNARX)
models—represented in Figure 3. Notice how the
model dynamics appear through the delay operator
z
−1
to make use of past values of both the input and
the output of the system. Maximum input and out-
put delays, respectively m and n, determine the mem-
ory that the model has of the input and output signals.
Neurons are arranged in layers; as input, each neuron
i in layer n receives a signal y
n,i
that is a linear com-
bination of every output signal of the neurons in the
previous layer n− 1:
y
n,i
= b
n,i
+
N
n−1
∑
i=1
w
n−1,i
x
n−1,i
. (2)
Here x
n−1,i
is the ith input of the neuron coming from
the previous layer, w
n−1,i
is a weight associated with
that input, N
n−1
is the number of such inputs, and
b
n,i
is a bias. Obviously, layer number 0 (which does
not exist) corresponds to the neural network’s inputs
themselves. The neuron’s output x
n,i
is determined
by its transfer function f
n,i
, usually known as activa-
tion function. Activation functions may be transfer
functions, but if the neural network already includes
a dynamic elsewhere activation functions will proba-
bly be static; the hyperbolic tangent sigmoid function
x
n,i
= f
n,i
(y
n,i
) =
1−e
−y
n,i
1+e
−y
n,i
is commonly used. Neural
networks employed below use the activation function
y(x) = x in the output layer; in other words, their out-
put is a biased linear combination of all the inputs.
For more details on neural network architecture, see
the references in section 1.
Training a neural network is an optimization pro-
cess in which weights w
n,i
and bias factors b
n,i
are
iteratively updated in order to minimize the mean
square error between the model output signals and
the output data. Numbers of delays m and n are to
be identified along with the weights and bias of the
neural network. For the system at stake NNARX,
models were trained using the Levenberg-Marquardt
backpropagation algorithm, chosen for speed and ac-
curacy. It is, actually, a local minimization method:
therefore it is not guaranteed that a global optimal
set of networks parameters is achieved. Because of
this and the fact that the algorithm initialization has a
random basis, the probability of two networks having
equal final weights and biases is very low, even when
trained with the same data. The data, after being re-
sampled at 500 Hz (the robot’s communication fre-
quency), was then actually split into three parts: 60%
for training, 20% for validation, and 20% for testing.
The best results were consistently obtained for neu-
ral networks with 4 input delays, 2 output delays and
a single neuron in the hidden layer: this was thus the
configuration chosen. Indeed, architectures with more
than one neuron in the hidden layer were tested, show-
ing insignificantly better or weaker overall results, de-
pending on the number of input and output delays. As
to the number of input and output delays, it was de-
termined as discussed below in section 4. That is why
only networks with a single neuron in the hidden layer
are considered below. (Mandic and Chambers, 2001;
Marquardt, 1963) further elaborate on neural network
training.
BIODEVICES2015-InternationalConferenceonBiomedicalElectronicsandDevices
158
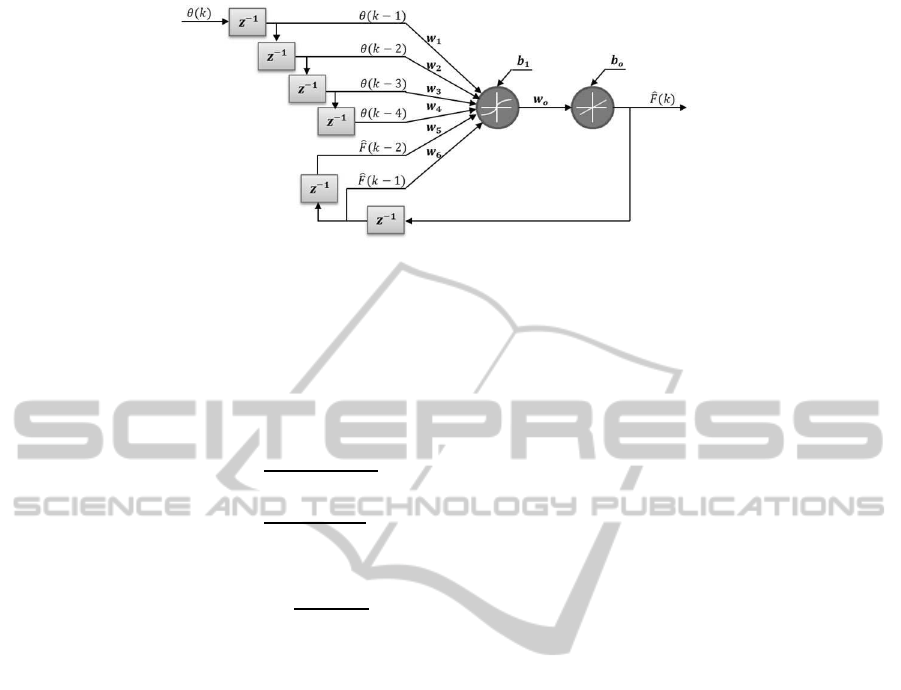
Figure 3: Neural network auto-regressive with exogenous inputs (NNARX) model, with one input and one output, one hidden
layer, n = 2 output delays and m = 4 input delays.
4 PERFORMANCE ASSESSMENT
Results were assessed with the following four perfor-
mance indexes:
Mean Squared Error, MSE =
∑
N
j=1
(y
j
− ˆy
j
)
2
N
(3)
Mean Absolute Deviation, MAD =
∑
N
j=1
|y
j
− ˆy
j
|
N
(4)
Maximum Deviation, MD = max
N
|y
j
− ˆy
j
| (5)
Variance Accounted For, VAF = 1−
σ
2
(y
y
y−
ˆ
y
y
y)
σ
2
(y
y
y)
(6)
The meaning of the variables for frequency and time
responses is shown in Table 1. With three series to
compare (gain, phase, time response) and four in-
dexes, there are in all 12 values to assess a model’s
performance.
Recall that in (Tejado et al., 2013) we have shown
that fractional models are better than integer order
models, inasmuch they achieve a performance which
is similar or even slightly better, with one parame-
ter less, and with clearly less parameter uncertainty.
Since identified integer direct models have 2 zeros
and 3 poles, inverse models with 3 poles and 3 ze-
ros were considered, as they ought to be causal. In
the case of fractional order models, the same princi-
ple as above was applied: since fractional order direct
models have 1 zero and 2 poles, causal inverse mod-
els with 2 zeros and 2 poles were considered. But this
time there is the commensurability factor. So, in a
first stage, the best commensurable order was found
sweeping this factor in the [0.1, 1.9] range with a 0.1
step, keeping the model’s dynamical structure (2 ze-
ros and 2 poles). The output of this process is a set of
19 models to compare using the 12 aforementioned
performance indexes. The following heuristic, es-
sentially a multi-criteria optimisation algorithm, was
used to choose the commensurate order:
1. Initialize P = 12 lists with a length L = 1;
2. Select the best L models according to each perfor-
mance index;
3. Model by model, check for its presence in any
of the P lists with length L and compute a his-
togram that shows the number of presences of ev-
ery model in all the lists;
4. If one model is found to be present in every single
list, that is the best choice and the heuristic stops;
5. Otherwise, increment the value of L by 1 and re-
peat from step 2.
It may happen that more than one model comes to
appear at all P lists at the same time. In that case, ei-
ther may be selected as convenient. With this heuris-
tic a good value for the commensurability order may
be got, but a 0.1 step may be a little too rough, so
a second stage search was performed. In this stage,
the best model was found sweeping the commensu-
rable order, with a 0.01 step, in a range defined by a
neighborhood, with a 0.1 radius, centred on the best
commensurability value (or values) obtained on the
first stage. From this sweeping process, another set of
models arise and are, consequently, compared, again,
using the same heuristic. Therefore, this second stage
is essentially a refined search around the best solution
(or solutions) of the first stage.
In the case of NNARX models, training algo-
rithms are rather blind when it comes to the best val-
ues of m and n. Models with an unrealistically large
(and unnecessary) number of input and output delays
may still provide good results. So we might assume,
initially, an unrealistically large number of input and
output delays and analyze the corresponding weights,
comparing them to decide if m and n should be decre-
mented, until none of the weights is lower than a cer-
tain threshold value. But in this case it is possible to
use prior knowledge of the system to be identified,
assume a maximum value for the number of input
DirectandInverseModelsofHumanArmDynamics
159
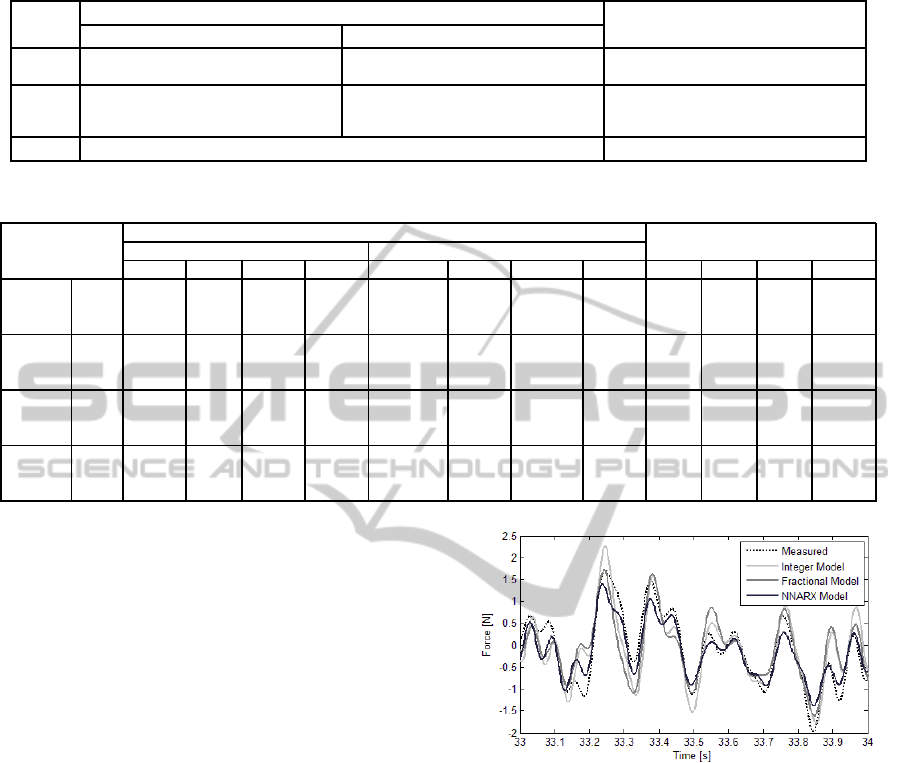
Table 1: Variables in equations (3)–(6).
Variables Frequency response Time
Gain Phase response
y
y
y Gain curve estimated from measured data for a
certain frequency vector
Phase curve estimated from measured data for a
certain frequency vector
Time series of measured input data
ˆ
y
y
y
Gain curve estimated from measured input and
identified inverse model for the same frequency
vector of y
y
y
Phase curve estimated from measured input and
identified inverse model for the same frequency
vector of y
y
y
Time series of inverse model output
N Length of the frequency vector length, that must be the same for y
y
y and
ˆ
y
y
y Length of the time series
Table 2: Performance comparison between identified inverse models of the human arm (best values in bold).
Frequency response Time response
Model Magnitude (dB) Phase (
◦
)
MSE MAS MD VAF MSE MAS MD VAF MSE MAS MD VAF
Int. 15.410 2.903 11.994 92.545 1007.274 28.486 69.760 74.125 0.272 0.371 1.819 41.508
All Frac. 21.632 3.455 14.352 88.903 628.689 18.032 58.400 86.449 0.266 0.354 1.658 47.888
NN 23.028 3.807 18.378 90.812 559.089 16.279 101.135 87.496 1.616 1.096 2.335 57.827
Int. 12.294 2.587 11.398 92.703 764.852 24.454 62.375 82.033 0.421 0.490 2.440 51.515
Type I Frac. 18.769 3.274 12.803 89.150 404.851 14.437 42.690 90.971 0.423 0.477 2.284 55.144
NN 25.354 4.094 14.948 90.574 467.089 16.026 76.924 88.489 0.286 0.415 2.001 63.803
Int. 15.315 2.842 12.230 93.656 1146.667 30.209 69.054 68.563 0.143 0.280 1.408 39.239
Type II Frac. 23.264 3.483 17.098 88.926 624.472 17.813 59.324 85.727 0.136 0.269 1.267 45.956
NN 22.443 3.908 14.337 93.456 920.851 17.971 157.716 81.771 0.086 0.227 1.086 57.492
Int. 16.032 3.089 10.971 93.165 1318.925 31.813 80.725 65.715 0.126 0.271 1.363 31.355
Type III Frac. 21.802 3.507 14.387 89.999 687.664 19.075 67.334 84.818 0.096 0.239 1.143 45.007
NN 24.498 4.129 12.308 93.450 647.907 17.872 128.764 84.132 0.098 0.250 1.041 54.529
and output delays and try every dynamical structural
combination within that maximum number of delays;
from this process, results a set of models that should
be compared, keeping the best one. It was shown
that linear inverse models are of 2nd or 3rd order, so
a maximum of 6 input and output delays was con-
sidered, to give some margin for possible additional
nonlinear dynamics to be identified in measured data.
With this maximum value, one gets a set of 36 neural
networks to compare and a heuristic similar to the one
described above for fractional plants was employed.
The only difference here is that, as mentioned previ-
ously, very complex networks can have slightly better
results, but at the cost of a lower computational ef-
ficiency. Therefore, to the 12 values of performance
indexes mentioned above, two more were added: m
and n themselves, thus providing for a neural network
which is a compromise between model performance
and model complexity.
5 COMMENTS AND
CONCLUSIONS
Performance results in Table 2 show that integer mod-
els often get better results in what the gain of the
transfer function is concerned, but not the phase, or
above all the time response; NN models, even though
nonlinear, do not consistently perform better, and,
Figure 4: Part of the responses of the several models, com-
pared with experimental data.
when they do, only slightly. Normalising all perfor-
mance indexes between 0 (worst) and 1 (best), and
averaging the results, we obtain the following results:
integer models, 0.6224; fractional models, 0.6847;
NNARX models, 0.3770. It can be seen that frac-
tional models achieve their performance being linear,
continuous (and thus fit for every sampling time) and
using one parameter less than integer models. They
are thus the simplest possible model.
So again we find a dynamic behaviour which we
can conclude is best described by fractional transfer
functions, just as was seen in (Tejado et al., 2013) for
direct models. Figure 4 shows some seconds of the re-
sponses obtained with the different models, compared
with experimental data.
Future work consists in using these models to
make a KUKA LWR 4+ 7–degree of freedom light
BIODEVICES2015-InternationalConferenceonBiomedicalElectronicsandDevices
160

weight robot behave like a human arm, and check this
behaviour against the experimental data collected.
ACKNOWLEDGEMENTS
This work was partially supported by Fundac¸˜ao para
a Ciˆencia e a Tecnologia, through IDMEC under
LAETA, and under the joint Portuguese–Slovakian
project SK-PT-0025-12.
REFERENCES
Adewusi, S., Rakheja, S., and Marcotte, P. (2012). Biome-
chanical models of the human hand-arm to simulate
distributed biodynamic responses for different pos-
tures. International Journal of Industrial Ergonomics,
42(2):249–260.
Djordjevic, V. D., Jaric, J., Fabry, B., Fredberg, J. J., and
Stamenovic, D. (2003). Fractional derivatives embody
essential features of cell rheological behavior. Annals
of Biomedical Engineering, 31:692–699.
Fu, M. J. and Cavusoglu, M. C. (2012). Human-arm-and-
hand-dynamic model with variability analyses for a
stylus-based haptic interface. IEEE Transactions on
Systems, Man, and Cybernetics, Part B: Cybernetics,
PP(99):1–12.
Haykin, S. (1999). Neural Networks—A Comprehensive
Foundation. Prentice Hall International, Inc, New Jer-
sey, U.S.A., 2nd edition.
Jang, J.-S. R., Sun, C.-T., and Mizutani, E. (1997). Neuro-
fuzzy and soft computing. Prentice-Hall, Upper Saddle
River. chapters 8 to 11.
Magin, R. L. (2004). Fractional Calculus in Bioengineer-
ing. Begell House.
Mainardi, F. (2010). Fractional Calculus and Waves in Lin-
ear Viscoelasticity. An Introduction to Mathematical
Models. Imperial College Press, London.
Malti, R., Victor, S., and Oustaloup, A. (2008). Advances in
system identification using fractional models. ASME
Journal of Computational and Nonlinear Dynamics,
3:021401–021401.
Mandic, D. and Chambers, J. (2001). Recurrent Neural Net-
works for Prediction—learning algorithms, architec-
tures and stability. John Wiley & Sons, LTD, Chich-
ester, England.
Marquardt, D. (1963). An algorithm for least squares es-
timation of nonlinear parameters. SIAM Journal on
Applied Mathematics, 11:431–441.
Miller, K. S. and Ross, B. (1993). An introduction to the
fractional calculus and fractional differential equa-
tions. John Wiley and Sons, New York.
Mobasser, F. and Hashtrudi-Zaad, K. (2006). A method for
online estimation of human arm dynamics. In Pro-
ceedings of th 28th Annual International Conference
of the IEEE Engineering in Medicine and Biology So-
ciety (EMBS’06), pages 2412–2416.
Nagarsheth, H., Savsani, P., and Patel, M. (2008). Modeling
and dynamics of human arm. In Proceedings of the
2008 IEEE International Conference on Automation
Science and Engineering (CASE’08), pages 924–928.
Nørgaard, M., Ravn, O., Poulsen, N. K., and Hansen,
L. K. (2003). Neural networks for modelling and con-
trol of dynamic systems: a practitioner’s handbook.
Springer-Verlag, London.
Park, S., Lim, H., Kim, B.-S., and Song, J.-B. (2006). De-
velopment of safe mechanism for surgical robots us-
ing equilibrium point control method. In Larsen, R.,
Nielsen, M., and Sporring, J., editors, MICCAI 2006,
pages 570–577. Springer Berlin / Heidelberg.
Podlubny, I. (1999). Fractional differential equations: an
introduction to fractional derivatives, fractional dif-
ferential equations, to methods of their solution and
some of their applications. Academic Press, San
Diego.
Samko, S. G., Kilbas, A. A., and Marichev, O. I. (1993).
Fractional integrals and derivatives. Gordon and
Breach, Yverdon.
Sommacal, L., Melchior, P., Cabelguen, J.-M., Oustaloup,
A., and Ijspeert, A. J. (2007a). Advances in Frac-
tional Calculus: Theoretical Developments and Ap-
plications in Physics and Engineering, chapter Frac-
tional Multimodels of the Gastrocnemius Muscle for
Tetanus Pattern, pages 271–285. Springer.
Sommacal, L., Melchior, P., Dossat, A., Petit, J., Ca-
belguen, J.-M., Oustaloup, A., and Ijspeert, A. J.
(2007b). Improvement of the muscle fractional mul-
timodel for low-rate stimulation. Biomedical Signal
Processing and Control, 2:226–233.
Sommacal, L., Melchior, P., Oustaloup, A., Cabelguen, J.-
M., and Ijspeert, A. J. (2008). Fractional multi-models
of the frog gastrocnemius muscle. Journal of Vibra-
tion and Control, 14(9-10):1415–1430.
Ta¨ıx, M., Tran, M. T., ares, P. S., and Guigon, E. (2013).
Generating human-like reaching movements with a
humanoid robot: A computational approach. Journal
of Computational Science, 4(4):269–284.
Tejado, I., Val´erio, D., Pires, P., and Martins, J. (2013).
Fractional order human arm dynamics with variabil-
ity analyses. Mechatronics, 23:805–812.
Val´erio, D., Ortigueira, M. D., and S´a da Costa, J. (2008).
Identifying a transfer function from a frequency re-
sponse. ASME Journal of Computational and Nonlin-
ear Dynamics, 3(2):021207–021207.
Val´erio, D. and S´a da Costa, J. (2011). An introduction
to single-input, single-output Fractional Control. IET
Control Theory & Applications, 5(8):1033–1057.
Val´erio, D. and S´a da Costa, J. (2013). An Introduction to
Fractional Control. IET.
Venture, G., Yamane, K., and Nakamura, Y. (2006). Identi-
fication of human musculo-tendon subject specific dy-
namics using musculo-skeletal computations and non
linear least square. In BioRob’06, pages 211–216.
DirectandInverseModelsofHumanArmDynamics
161
