
Multi-Agent Approach for Controlling Robots Marching in a File
A Simulation
Yasushi Kambayashi
1
, Ryosuke Shibuya
2
and Munehiro Takimoto
2
1
Department of Computer and Information Engineering, Nippon Institute of Technology,
4-1 Gakuendai, Miyashiro-machi, Minamisaitama-gun, 345-8501 Japan
2
Department of Information Sciences, Tokyo University of Science 2641 Yamazaki, Noda 278-8510 Japan
Keywords: Mobile Software Agent, Multi-agent System, Multi-robot System, Self-organizing System, Simulation.
Abstract: It is a fundamental concern for multi-robot system research community how to explore unknown
environments. This paper presents an approach for controlling cooperative multiple robots exploration in an
unknown environment. The approach we are proposing aims to minimizing the overall exploration cost for
multiple robots that march in procession. In order to achieve the goal, the file of multiple robots must be
able to effectively come out of dead-ends while exploring a maze-like environment. The proposed approach
employs multiple mobile software agents that can migrate from a robot to another robot freely to bring
certain role and ability to a robot. In particular, the mobile software agent brings the role of leader to an
arbitrary robot in a file, so that the migrated robot becomes the leader of a subgroup of the robots that can
march in a file into a part of environment. In order to demonstrate the effectiveness of our approach, we
have built a simulator, and partially constructed a real multi-robot system.
1 INTRODUCTION
In the last two decades, robot systems have made
rapid progress not only in their behaviours but also
in the way they are controlled. In particular, a
control system based on multiple software agents
can control robots efficiently (Kambayashi and
Takimoto, 2005).
On the other hand, we have witnessed the advent
of multi-robot systems. A multi-robot system
consists of a large number of homogeneous robots
that have limited capability but, when combined into
a group, they can generate more complex behaviours
(Parker, 2008). In multi-robot systems, robots
communicate with each other to achieve cooperative
behaviours. There are three major advantages of
multi-robot systems over single robot systems
(Stone and Veloso, 2000) (Yasuda and Ohkura,
2005). The first is parallelism; a task can be
achieved by autonomous and asynchronous robots in
a system. The second is robustness; it is realized
through redundancy. The system can have more
robots than required for a certain task. The third is
scalability; a robot can be added to or removed from
the system easily.
For the multi-robot system, a control system
based on the multiple software agents can control
robots efficiently. Multi-agent systems introduced
modularity, reconfigurability and extensibility to
control systems, which had been traditionally
monolithic. It has made easier the development of
control systems on distributed environments such as
multi-robot systems.
On the other hand, excessive interactions among
agents in the multi-agent system may cause
problems in the multiple robot environments. In
order to mitigate the problems of excessive
communication, we have developed mobile agent
methodologies for distributed environments. In a
mobile agent system, each agent can actively
migrate from one site to another site. Since a mobile
agent can bring the necessary functionalities with it
and perform its tasks autonomously, it can reduce
the necessity for interaction with other sites. In the
minimal case, a mobile agent requires that the
connection is established only when it performs
migration (Binder et al., 2001).
We have designed and implemented multiple
mobile software agent systems that control several
multi-robot systems that 1) playing a tag by
dynamically exchanging roles (Kambayashi and
Takimoto, 2005), 2) cooperatively assemble
themselves at energy-wise optimal locations
222
Kambayashi Y., Shibuya R. and Takimoto M..
Multi-Agent Approach for Controlling Robots Marching in a File - A Simulation.
DOI: 10.5220/0005279002220229
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 222-229
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

(Kambayashi et al., 2012), 3) serialize themselves
(Shintani et al., 2011a) (Shintani et al., 2011b), and
4) search and recollect arbitrary targets without
redundant movements (Ishiwatari et al., 2014), 5)
cooperatively transport unknown objects (Shibuya et
al., 2013) (Takahashi et al., 2014), and 6)
constructing ad hoc network (Kambayashi et al.,
2014).
In the multi-robot systems, the multiple mobile
software agents migrate in a herd of scattered mobile
robots to collect information about them as well as
drive minimum number of them based on the
collected information (Kambayashi et al., 2012).
Moving software agents instead of physical robots
greatly save not only energy consumption but also
total cost for several tasks through effective
utilization of idle resources (Nagata et al., 2013).
In this paper, we propose a multi-robot system
that explores maze-like environments in a file. When
a file stacked in a dead-end corridor, they must come
back. In general, when a file of multiple robots face
to a dead-end, all the members have to go backword
until the leading robot can turn into a branch of the
corridor (Figure 1). The longer the file is, the more
futile movements occurs. If arbitrary robot can be a
leader, we can let the robot at the most convenient
position be a commander of the partial file so that
only partial queue of the robots have to turn and
follow the leading robot (Figure 2). In order to
achieve such a coordination, we employ two types of
mobile software agents. One drives the robot and
makes it follow the preceding robot, and the other
also drives the robot and makes it lead the queue of
robots and explore the corridor.
Figure 1: The file has to go back all the way until the
leading robot can enter the branch.
Figure 2: An arbitrary robot can be the leading robot; the
order of robots in the file is changed.
The structure of the balance of this paper is as
follows. In the second section, we describe the
background. In the third section, we describe how to
control multiple robots in a file by the mobile agents.
The fourth section demonstrates the feasibility of our
approch through simulatoin, and we conclude our
discussionsin in the fifth section.
2 BACKGROUNDS
Even though many research scientists have carried
out in the area of exploration for single autonomous
robot, not much of this type of works has been
applied to multi-robot systems. Most of these
research efforts have been taken existing algorithms
that are developed for single robot exploration and
have extended them to multiple robots. Just recently,
research scientists have developed new algorithms
that are fundamentally distributed.
Fox et al. took advantage of multiple robots to
obtain more accurate positions than using single
robot (Fox et al., 2000). Roumeliotis and Bekey
demonstrated the ability of Kalman-filter based
approach that provides a team of mobile robots to
simultaneously localize by sensing their teammates
and combining location information from all the
team members (Roumeliotis and Bekey, 2002).
Vaughan et al. proposed an algorithm that makes a
team of robots be able to navigate in an unknown
environment by using a trail of waypoint markers
(Vaughan et al, 2002). They demonstrated that their
approach can handle the problem caused by
accumulating small errors of odometers, thus it is
robust against the failure of individual robots. They
claimed that their multi-robot system almost always
converges to the best route discovered by any robot
of the team.
In order to take advantage of multiple robots to
explore unknown environments, formation control
has been one of the most important topics of multi-
robot systems. Fredslund and Mataric address the
problem of achieving formation control using only
local sensing and interaction (Fredslund and Mataric,
2002). Their idea is to make each robot keeps track
of one particular robot within its view. They
demonstrated that their approach can provide a
variety of formations. Even though these researches
have produced marvelous achievements, none of
them takes advantage of multiple mobile agents.
Gonzalez et al. proposed an application of multi-
agent system to multi-robot system (Gonzalez et al.,
2011). They proposed control architecture for
intentional cooperation that distributes
Multi-AgentApproachforControllingRobotsMarchinginaFile-ASimulation
223
responsibilities by applying a hierarchical
decomposition of the multi-agent cooperative
control. By assigning well-defined agents to multiple
robots, they achieved to make the multi-robot
system pursue to solve multi-resolution problem.
Even though their system is based on multi-agent
model, the agents are static, not movable among
robots.
Shintani et al. proposed a multi-agent system
based multi-robot system (Shintani et al., 2011a)
(Shintani et al., 2011b). They employed two types of
mobile software agents that make scattered multiple
mobile robots form a line. The notable point of their
idea is that they make pheromone as mobile agents
to attract and to guide mobile robots into a queue
while minimizing energy consumption. Our
approach is dynamically assigning the leading role
to a robot in a file by migration of a mobile software
agent with the leading ability.
3 CONTROLLING ROBOTS IN A
FILE
In the traditional applications of multi-agent system
to a multi-robot system, each agent has fixed role, is
fastened on a particular robot and drives the robot to
achieve its own specific role. In our approach,
however, the characteristic of a robot depends on the
mobile agent that currently resides on the robot.
Therefore any robot in a file can be not only a
follower robot but also a leader robot depending on
the circumstance around it.
In order to realise such requirement, we made
each robot have the following capabilities:
1. Each robot has a visible identifier, and each
robot has a visual sensor to follow the
preceding robot.
2. Each robot has a communication mechanism
either wireless LAN or ad hoc communication
mechanism so that mobile software agents
migrate from a robot to another robot freely.
3. Each robot has an ability to sense the
geographic characteristics of the immediate
surroundings. Particularly the robots must
sense the existence of branches of a corridor.
With these capabilities, a file of robots follows the
following algorithms in order to explore maze-like
corridors and get out of dead-end.
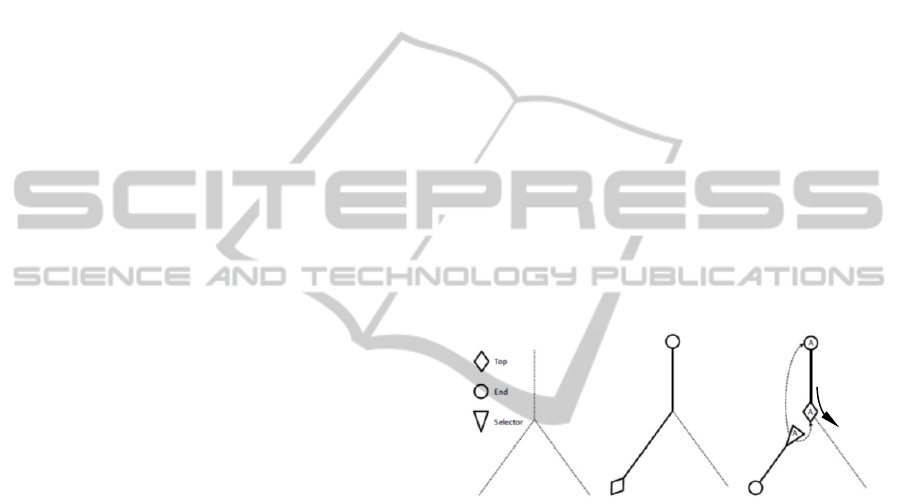
3.1 Movement of a File of Robots
Figure 3 shows a corridor splitting into two branches.
Both of the branches are dead-ends. A file of robots
comes from the top, and enters in the left branch and
checks the right branch. Upon realising both of them
are dead-end, it retreats. In the figure, the dotted
lines depict the corridors, and the solid line depicts
the file of robots where the diamond shape depicts
the leading robot and the circle depicts the rear of
the file.
Figure 3b shows that the leading robot just
comes to the dead-end of the left branch. Then the
most conveniently located robot in the file, i.e. the
robot at the junction, disengages from the line and
becomes the new leading robot. The immediately
preceding robot of the new leader becomes the
selector (triangle shape), and the former leader
becomes the end robot. Consequently, the file splits
into two, and the new leader that was the latter half
of the file enters the right branch while the stacked
half lines of robots are left in the left branch and
waiting as shown in Figure 3c. When the last robot
of the file just passes the junction, i.e. in front of the
selector, the selector follows the rear robot. In order
to do so, the rear and the selector has the same label;
‘A’ in this case.
(a) (b) (c)
Figure 3: A queue of robots comes to a dead-end and
explore the other branch.
If the right branch corridor is long enough to
contain entire robots, the robots reform a file and
continue the exploration. But if the corridor is also
dead-end, the entire robots have to come back. In
such a situation we have two cases. One is the case
where the file is longer than the corridor, and the
other is the case where the file is shorter than the
corridor. We examine each case in turn.
First we consider the case where the file is longer
than the corridor. Figure 4 shows this case. The new
leading robot comes into the dead-end of the branch
before the rear robot comes at the junction (Figure
4a). The file splits itself into two. One of the two
robots at the junction becomes the new leader and
the other becomes the selector (Figure 4b). They are
labelled ‘B’. Since there is no third corridor, the new
leader exchanges its role with the rear robot (Figure
4c). Note that the new leader’s label is A while the
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
224
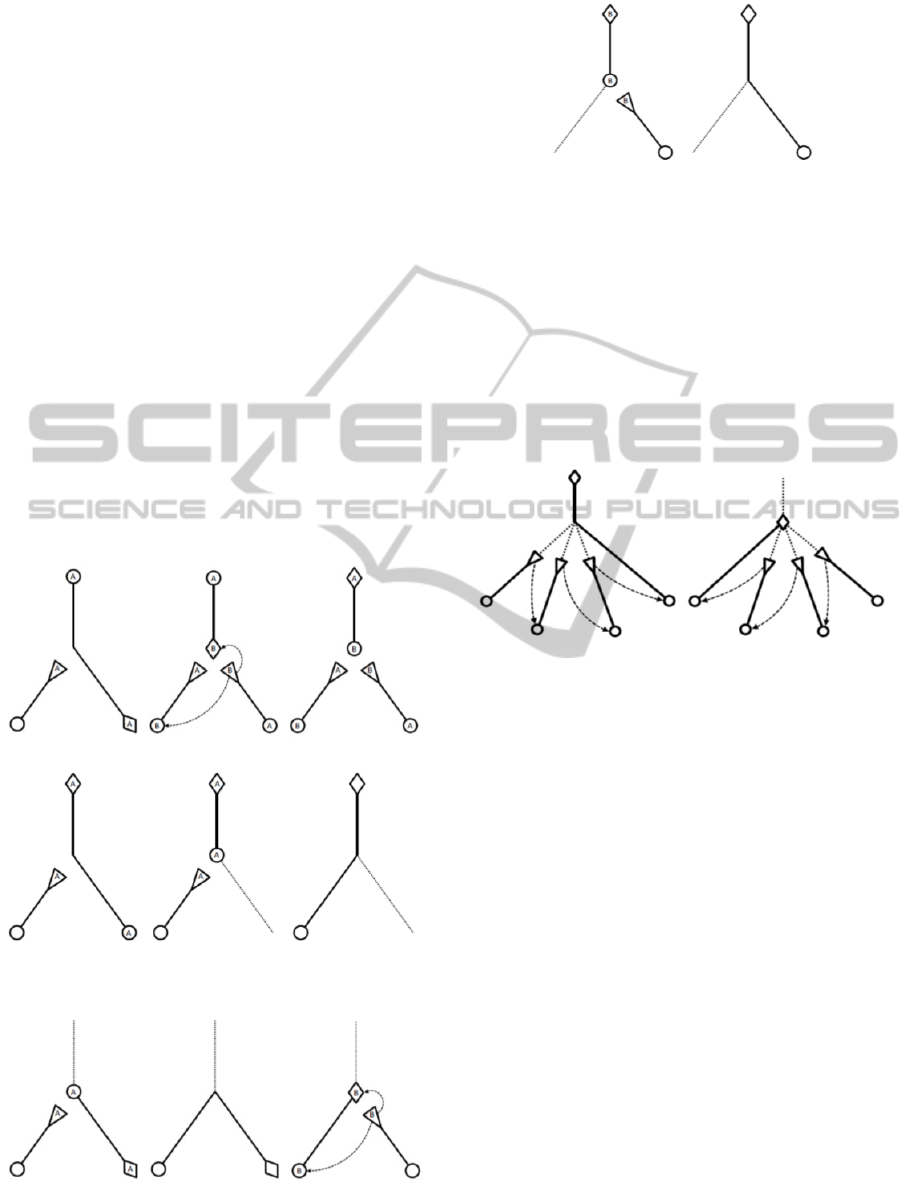
exchanged end robot’s label is B (Figure 4c). The
selector B follows the end robot B to form single
line (Figure 4d), then as the file recedes and when
the rear robot comes to the junction, the selector A
follows the end robot A (Figure 4e), so that they
complete to form the entire file to go out of the
corridors as shown in Figure 4f.
Next, we consider the case where the file is
shorter than the corridor. Figure 5 shows this case.
As in the first case, when the file comes into the
dead-end of the left branch, it splits into two and the
selector A is created at the end of the left line. The
new leading robot commands the latter half of the
file and enters into the right branch. At some point,
the end robot comes to the junction as shown in
Figure 5a. Then the selector follows the last robot of
the latter half to form a complete file (Figure 5b).
When the new leader comes into the dead-end of the
right corridor, the file split into two lines again, and
a new leader B and selector B are created (Figure
5c). The new leader retracts the file, and then the
selector B follows the end robot B to form the entire
file again to get out the corridors as shown in Figure
5d and 5e.
(a) (b) (c)
(d) (e) (f)
Figure 4: The case of the file is longer than the corridor.
(a) (b) (c)
Figure 5: The case of the file is shorter than the corridor.
(d) (e)
Figure 5: The case of the file is shorter than the corridor
(cont.).
The difference between these two cases is just
the difference of the order of reconnecting the
queues to reform the file. In the first case, the queues
are connected in the reverse order in their being split,
while the second case connects in the order in their
being split. This algorithm of dead-end corridor
exploration is applicable not only two way branches
but also many ways branches. The Figure 6 shows
the four ways cases.
(a) (b)
Figure 6: The four way branches. The file is longer than
the route (a), and the file is shorter than the route (b).
3.2 Control Algorithm using Mobile
Software Agents
In this section we describe how the algorithms
explained in the previous section are implemented
by the mobile software agents. We have created two
types of agents: Follower Agent (FA) and Pioneer
Agent (PA). The former has the role that follows the
immediately preceding robot as well as the role of
selector. The latter has the role of leader. As
mentioned in the algorithms, the leader exchanges
its role quite often. Therefore the PA is implemented
as a mobile agent and migrates from a robot to
another robot. Because PA migrates into a robot on
which FA already resides, PA has higher priority
and overrides the role of FA. We describe each of
them in the following subsections.
3.2.1 Follower Agent
FA has two states; one is just following specified
robot (state A), and the other is waiting until it is
Multi-AgentApproachforControllingRobotsMarchinginaFile-ASimulation
225

notified to connect to the specified robot (state B).
The base state is A. Upon receiving command from
PA, FA turns to its state to B. When the connection
is done, the state turns into A again.
Figure 7 shows the behaviours of FAs in pseudo
code when they are in state A and B, respectively.
detect_robot() is the function that recognizes
the robot in front of the robot that FA is riding.
follow_robot specifies the robot FA is supposed
to follow, and
follow_robot_alt specifies the
selector robot.
The driving behaviours of a FA are determined
by the state. FAs cannot change their own states. PA
has the privilege to write variables in FAs so that PA
can determine the state of a certain FA. PA also
specifies to which robot (label) the FA drives to
follow. As shown in Figure 7, FA cannot even turn
the driving robot to the reverse direction.
The important point is that only PA can turn the
driving robot other way round. Therefore in order to
turn around and to retract the robot, PA has to
migrate to the robot. The behaviours of PA are
described in the next subsection.
procA () { // behaviour of state A
r = detect_robot();
if (r == follow_robot)
follow ( follow_robot)
else
stop ()
}
procB () { // behaviour of state B
stop ()
while ( state == ‘B’) {
r = detect_robot();
if (r == follow_robot
|| r == follow_robot_alt) {
if(r is End ){
follow_robot = r
state = ‘A’
}
}
}
}
Figure 7: The behaviours of Follower Agents.
3.2.2 Pioneer Agent
PA makes the driving robot explore corridors.
Therefore PA is always resides on the leading robot.
When the robot comes to a dead-end, PA has to
change the directions of the entire file as well as to
exchange the roles of leading robot with rear robot.
Figure 8 shows the behaviours of PA in pseudo
code.
current_robot specifies the robot the PA
currently resides.
arrive_branch() is the
function to detect a junction,
arrive_deadend()
is the function to detect a dead-end,
turn_around() makes the current robot turn the
other way round, and
migrate_to makes the PA
migrate to the specified robot designated by an IP
address.
The most important behaviour is what PA has to
do when
arrive_deadend() returns true. First,
it saves the
current_robot to tmp, and moves
back to the robot at the last junction by performing
the function
back_to_branch(). Note that turning
the robot to the reverse direction is done in this
migration function calls. Also note that when the PA
comes to the junction, the two robots are facing each
other. The PA needs to change the state of the FA on
the robot it is facing. Thus the PA makes the FA
selector (state B) by making
end_robot and
current_robot be follow_robot and
follow_robot_alt (labelling) respectively as
well as
state. Finally it makes the tmp robot be the
rear robot.
explore() {
while (true) {
if (arrive_deadend()) {
tmp = current_robot
back_to_branch()
prev_r = detect_robot()
prev_r->FA->follow_robot
= current_robot
prev_r->FA->follow_robot_alt
= end_robot
prev_r->FA->state = ‘B’
end_robot = tmp;
}
go_foward()
}
}
back_to_branch() {
while (!arrive_branch()){
turn_around()
r = detect_robot()
FA->follow_robot = r
migrate_to (r->address )
}
}
Figure 8: The behaviours of Pioneer Agents.
4 IMPLEMENTATION BY A
SIMULATOR
In order to demonstrate the feasibility of our
algorithms, we have implemented a simulator for the
multi-robot system to explore corridors with dead-
ends. In this section, we first describe the mobile
agent system we employ and then explain the
simulation of robot movements.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
226

4.1 Agent System as a Thread
In order to implement mobile agents, we employed
Java threads and made them migrate. We have
created
Agent
class that inherits
Serializable
interface so that the object code can be serialised. In
order to implement the migration, we translate the
compiled Java bytecodes so that the migrating code
can save local variables, stack variables, and the
program counter. Figure 9 shows a Java pseudo code
example.
class MovableAgent extends Agent {
run (){
switch (loadPC()){
case 1:
loadLocals();
loadStacks();
goto L1;
break ;
default :
break ;
}
/* do something */
storeLocals();
storeStacks();
storePC(1);
migrate(IP address);
throw new MigrateException();
L1:
/* do something */
}
}
Figure 9: Pseudo Java code for mobile agents.
In order to perform a migration, we make an
instance of
MovableAgent
save local and stack
variables before calling
the function
migrate()
,
set a label and save the address of the label. In this
case the label is
L1
. Right before the label, the
instance throws an exception and let the run-time
system know the thread wants to migrate. Upon
catching the exception, the run-time system
serialises the instance of
MovableAgent
and sends
it to the designated address. Another run-time
system that receives the serialised object, restores
the instance, and makes it run as a thread. When the
thread resumes running, it restore the local and stack
variables, loads the program counter, and jumps to
L1 to complete reproduction of environment and
execution of the thread at the sent site.
4.2 The Simulator
We have implemented the Pioneer Agent (PA) and
Follower Agent (FA) by using the agent system
described in the previous subsection. This subsection
reports the result.
The Figure 10 shows the experiment of the case
where the file of robots is shorter than the corridors.
The file of seven robots is ready and starts marching
(Figure 10a). While each robot has a FA, only the
leading robot is driven by PA. When the leader finds
that the right corridor is dead-end, the PA starts
migrating back the robots one by one and turns them
around into reverse direction (Figure 10b).
Once PA comes to the robot at the junction, the
PA makes it as the new leader (Figure 10c). The
second file, which consists of the latter three robots,
enters into the centre corridor, while the other four
robots in the right corridor are stack in the dead-end
and waiting (Figure 10d). The second file soon
comes into the dead-end, the PA moves back to the
middle of three, and makes it the leader for
exploration to the left corridor. At this time, the
former leading robot is left and made waiting, and
the four robots in the right corridor join to the file
with the very new leader (Figure 10e). When the
marching file comes into the dead-end of the left
corridor, the PA changes the leading robot again,
and makes the file retreat. Then, we can observe that
the new file is constructed as the right queue first,
then the centre robot joins, and finally the left queue
follows the new file (Figure 10f).
(a) (b) (c)
(d) (e) (f)
Figure 10: The case of the file is shorter than the corridors.
The Figure 11 shows the experiment of the case
where the file of robots is longer than the corridors.
At this time, the file consists of fourteen robots.
Figures 11a through 11d show that the robots
display the same behaviours as shown in Figures 10a
through 10d. Upon finding the last corridor (left one)
Multi-AgentApproachforControllingRobotsMarchinginaFile-ASimulation
227
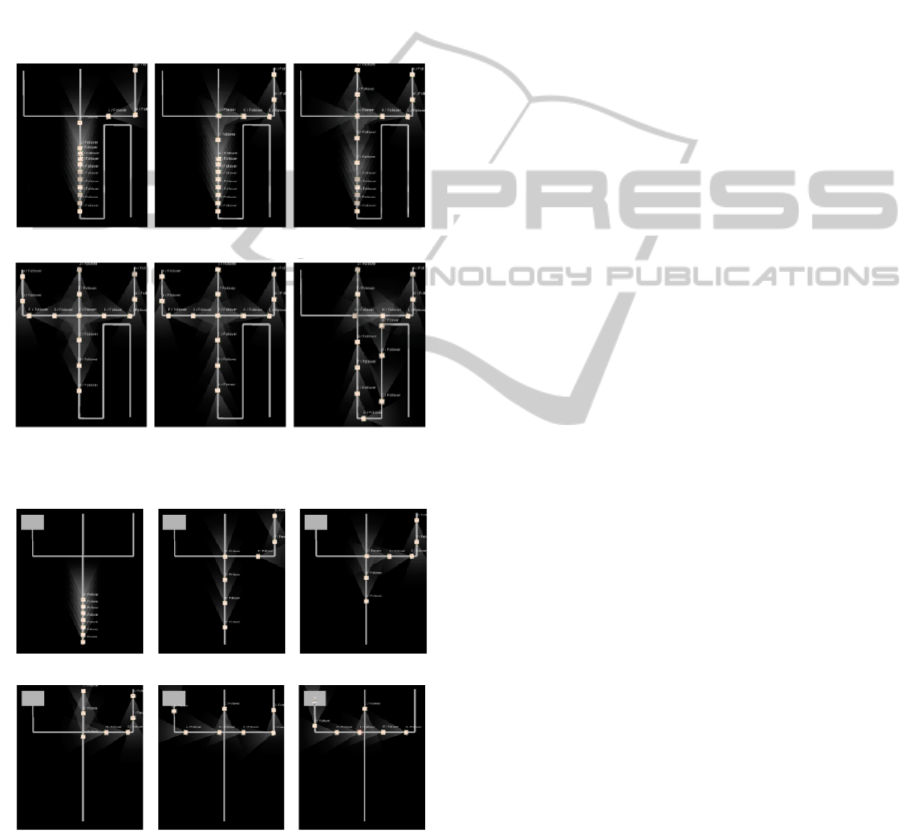
is dead-end, the PA come back to the robot at the
junction (Figure 11d). Then the PA also finds there
is no alternative corridors to explore and realises it
has to make all the robots retreat. The PA further
migrates back to the last robot and makes it the
leading robot (the very bottom one) (Figure 11e).
The PA drives the new leader and makes all the
robots go downward. At this time, we can observe
that the new file is constructed as the queue that
does not enter the dead-end corridors first, then the
left queue joins next, the centre queue, and finally
the right queue joins to complete the file.
(a) (b) (c)
(d) (e) (f)
Figure 11: The case of the file is longer than the corridors.
(a) (b) (c)
(d) (e) (f)
Figure 12: The case of the file is longer than the corridors.
As the final example, we show the case of
existence of a goal place instead of dead-end. Figure
12 shows the case. The upper left rectangle is the
goal place. Robots are supposed to stop and stay
when they reach there. We can observe that the file
of mobile robots behaves just the same as the case
where the file is shorter than the corridors until the
leading robot reaches the goal place. Then the PA
stops working and wait for the rest of the file the
FAs drive.
We have confirmed that the algorithms we
proposed for mobile software agents successfully
drive a file of robots to explore maze-like corridors
in both of the cases where the file is shorter than the
corridors and where the file is longer than the
corridors. The changes of leading robot by
migrations of a mobile agent PA successfully guide
the file of robots.
5 CONCLUSIONS AND FUTURE
WORKS
We have presented a multi-robot system that
explores maze-like environments in a file. When a
file stacked in a dead-end corridor, they must come
back. In order to accomplish smooth retraction, we
propose mobile software agent approach that
changes the leader of the file dynamically by
exchaging the roles by the agents.
Dynamic exchange of roles is executed by the
migration of software agents. The software agents
are implemented as Java threads. In order to
physically move a Java thread to another computer,
we not only use Java Serializable interface but also
translation of compiled byte codes so that the
transmitted serialised code can be restored with local
and stack variables as well as program counter.
In order to demonstrate the feasibility of our
approach and algorithms, we have implemented a
simulator. The simulator shows a file of mobile
robots can explore maze-like corridors in both of the
cases where the file is shorter than the corridors and
where the file is longer than the corridors. The
corridors can branch out in arbitrary numbers.
Because we could confirm our algorithm work
well in the simulator, it would the natural step to
implement the mobile robot system by using real
robots. Since the results of simulator are simply
theoretical ones and the setting is too ideal, we
thought it has no point to execute numerical
experiments with the simulator. Instead, we are
constructing a herd of mobile robots to perform the
real world experiments. The corridors are
implemented as lines of silver tape commonly used
for line-trace robots. The setting is just a line-trace
robot exercise commonly done in any technical
colleges. We are solving the problems we encounter
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
228

during the implementation one by one, and are going
to show a complete multi-robot system that explores
maze-like environment. The knowledge and
experience we obtain through this project will
contribute to the rescue robotics research community.
ACKNOWLEDGEMENTS
This work is supported in part by Japan Society for
Promotion of Science (JSPS), with the basic
research program (C) (No. 26350456), Grant-in-Aid
for Scientific Research.
REFERENCES
Binder, W., Hulaas, J. G. and Villaz, A., 2001. Portable
resource control in the j-seal2 mobile agent system. In
AGENTS ’01, Fifth International Conference on
Autonomous Agents, pages 222–223.
Fox, D., Burgard, W., Kruppa, H. and Thrun. S., 2000.
Collaborative multi-robot exploration. Autonomous
Robots, 8(3), pages 325-344.
Fredslund, J. and Mataric, M. J., 2002. A general
algorithm for robot formations using local sensing and
minimal communication, IEEE Transactions on
Robotics and Automation, 18(5), pages 837-846.
Gonzalez, E., De la Rosa, F., Miranda, A. S., Angel, J. and
Figueredo, J. S., 2011. A control agent architecture for
cooperative robotic tasks, In Yasuda, T and Ohkura, K.
eds. Multi-Robot Systems, Trends and Development,
InTech, Rijeka, Croatia, pages.
Ishiwatari, N., Sumikawa, Y., Takimoto, M. and
Kambayashi, Y., 2014. Multi-Robot Hunting Using
Mobile Agents. In Proceedings of the Eighth KES
Conference on Agent and Multi-Agent Systems (KES-
AMSTA 2014), volume 296 of LNAISC, pages 223-
232. Springer.
Kambayashi, Y. and Takimoto, M., 2005. Higher-Order
Mobile Agents for Controlling Intelligent Robots.
International Journal of Intelligent Information
Technologies, 1(2), pages 28–42.
Kambayashi, Y., Yamachi, H., Takimoto, M., 2012.
Feasibility Studies of the Intelligent Cart System.
Communications in Information Science and
Management Engineering, 2(6), 1-8.
Kambayashi, Y., Shinohara, T., Takimoto, M., 2014. Self-
Optimizing Algorithms for Mobile Ad Hoc Networks
Based on Multiple Mobile. In Proceedings of the 6th
International Conference on Agents and Artificial
Intelligence (ICAART 2014), pages 156–163.
SciTePress.
Nagata, T., Takimoto, M. and Kambayashi, Y., 2013.
Cooperatively Searching Objects Based on Mobile
Agents, Transaction on Computational Collective
Intelligence XI, volume 8065 of LNCS, pages119-136.
Springer.
Parker, L. E., 2008. Distributed intelligence: overview of
the field and its application in multi-robot systems,
Journal of Physical Agents, 2(1), pages 5-14.
Roumeliotis, S. I. and Bekey, G. A., 2002. Distributed
multirobot localization, IEEE Transactions on
Robotics and Automation, 18(5), pages 781-795.
Shibuya, R., Takimoto, M., and Kambayashi, Y., 2013.
Suppressing energy consumption of transportation
robots using mobile agents. In Proceedings of the 5th
International Conference on Agents and Artificial
Intelligence (ICAART 2013), pages 219–224.
SciTePress.
Shintani, M., Lee, S., Takimoto, M., Kambayashi, Y.,
2011. A Serialization Algorithm for Mobile Robots
Using Mobile Agents with Distributed Ant Colony
Clustering. In Knowledge-based and Intelligent
Information and Engineering Systems, (KES 2011).
volume 6881 of LNAI, pages 260-270. Springer.
Shintani, M., Lee, S., Takimoto, M., and Kambayashi, Y.
2011b. Synthesizing pheromone agents for
serialization in the distributed ant colony clustering. In
Proceedings of the International Conference on
Evolutionary Computation Theory and Applications
and the Proceedings of the International Conference
on Fuzzy Computation Theory and Applications, pages
220–226. SciTePress.
Stone, P. and Veloso, M., 2000. Multiagent systems: A
survey from a machine learning perspective,
Autonomous Robots, 8(3), 345–383.
Takahashi, R., Takimoto, M., and Kambayashi, Y. 2014.
Cooperatively Transporting Unknown Objects Using
Mobile Agents, In Proceeding of the 6th International
Conference on Agents and Artificial Intelligence
(ICAART 2014), vol. 2, pp.60-68. SciTePress.
Takimoto, M., Mizuno, M., Kurio, M., and Kambayashi,
Y. (2007). Saving energy consumption of multi-robots
using higher-order mobile agents. In Proceedings of
the First KES Symposium on Agent and Multi-Agent
Systems (KES-AMSTA 2007), volume 4496 of LNAI,
pages 549–558. Springer.
Vaughan, R. T., Stoy, K., Sukhatme, G. and Mataric, M.J.,
2002. LOST: Localization-Space Trails for Robot
Teams, IEEE Transactions on Robotics and
Automation, 18(5), pages 796-812.
Yasuda, T. and Ohkura, K., 2005. Autonomous role
assignment in a homogeneous multi-robot systems,
Journal of Robotics and Mechatronics, 17(5), pages
596–604.
Multi-AgentApproachforControllingRobotsMarchinginaFile-ASimulation
229
