
Design of Communication and Control for
Swarms of Aquatic Surface Drones
Anders Lyhne Christensen
1,2,3
, Sancho Oliveira
1,2,3
, Octavian Postolache
1,2
, Maria Jo
˜
ao de Oliveira
2,4
,
Susana Sargento
1,5
, Pedro Santana
1,2
, Lu
´
ıs Nunes
1,2
, Fernando Velez
1,6
, Pedro Sebasti
˜
ao
1,2
,
Vasco Costa
1,2,3
, Miguel Duarte
1,2,3
, Jorge Gomes
1,3,7
, Tiago Rodrigues
1,2,3
and Fernando Silva
1,3,7
1
Instituto de Telecomunicac¸
˜
oes, 1049-001 Lisbon, Portugal
2
Instituto Universit
´
ario de Lisboa (ISCTE-IUL), 1649-026 Lisbon, Portugal
3
BioMachines Lab, 1649-026 Lisbon, Portugal
4
Vitruvius FabLab-IUL, 1649-026 Lisbon, Portugal
5
Universidade de Aveiro, 3810-193 Aveiro, Portugal
6
Universidade da Beira Interior, 6201-001 Covilh
˜
a, Portugal
7
LabMAg, Faculdade de Ci
ˆ
encias da Universidade de Lisboa, 1749-016 Lisbon, Portugal
Keywords:
Robotics Platform, Digital Manufacturing, Mesh Networks, Evolutionary Robotics, Decentralized Control.
Abstract:
The availability of relatively capable and inexpensive hardware components has made it feasible to consider
large-scale systems of autonomous aquatic drones for maritime tasks. In this paper, we present the CORATAM
and HANCAD projects, which focus on the fundamental challenges related to communication and control in
swarms of aquatic drones. We argue for: (i) the adoption of a heterogeneous approach to communication in
which a small subset of the drones have long-range communication capabilities while the majority carry only
short-range communication hardware, and (ii) the use of decentralized control to facilitate inherent robust-
ness and scalability. A heterogeneous communication system and decentralized control allow for the average
drone to be kept relatively simple and therefore inexpensive. To assess the proposed methodology, we are cur-
rently building 25 prototype drones from off-the-shelf components. We present the current hardware designs
and discuss the results of simulation-based experiments involving swarms of up to 1,000 aquatic drones that
successfully patrolled a 20 km-long strip for 24 hours.
1 INTRODUCTION
Maritime tasks are usually expensive to carry out due
to the use of manned vehicles with large operational
crews. While effort has been made to adapt unmanned
vehicle technology for use in maritime tasks, such
systems are currently relatively expensive to acquire
and operate, and only a single or a few vehicles are
typically deployed (Yan et al., 2010).
An alternative approach is the use of autonomous
systems composed of large numbers of relatively sim-
ple and inexpensive drones (swarms). The use of
swarms is advantageous given that many maritime
tasks such as environmental monitoring, sea life local-
ization, and sea-border patrolling require distributed
sensing. The goals of our ongoing HANCAD and
CORATAM projects are to overcome fundamental
challenges related to communication and control in
large-scale swarms of aquatic surface drones. In the
HANCAD project, we propose to use a heteroge-
neous network architecture in which only a subset
of the drones are required to carry long-range com-
munication equipment. As part of the project, we
will study and develop novel routing algorithms to
achieve effective communication in such ad-hoc het-
erogeneous networks. In the CORATAM project,
we propose to use a novel hybrid approach (Duarte
et al., 2014a) to the semi-automatic synthesis of self-
organized behavior for swarms of aquatic drones. The
potential benefits of decentralized control based on
self-organization include scalability and robustness to
faults (Brambilla et al., 2013), both of which are es-
sential in many real-world scenarios.
In this paper, we present the major components of
our ongoing work, namely: (i) the design of our pro-
totype hardware, (ii) the heterogeneous communica-
548
Lyhne Christensen A., Oliveira S., Postolache O., João de Oliveira M., Sargento S., Santana P., Nunes L., Velez F., Sebastião P., Costa V., Duarte M.,
Gomes J., Rodrigues T. and Silva F..
Design of Communication and Control for Swarms of Aquatic Surface Drones.
DOI: 10.5220/0005281705480555
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 548-555
ISBN: 978-989-758-074-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

tion approach, and (iii) the methodology adopted for
the synthesis of self-organized control. The rest of the
paper is organized as follows. In Section 2, we discuss
the potential application of swarms of aquatic drones
to real-world tasks. We then discuss the challenges,
describe our proposed solutions, and the studies con-
ducted so far in terms of hardware (Section 3), com-
munication (Section 4), and control (Section 5). Fi-
nally, in Section 6, we discuss our ongoing work and
the future prospects for large-scale swarms of aquatic
drones.
2 ROBOTS FOR MARITIME
TASKS
Aquatic robots have been studied for a wide range
of applications including hydrography (Plueddemann
et al., 2008), environmental monitoring (Pinto et al.,
2014), geology (Lane et al., 1997), archeology (Clark
et al., 2008), defense (Clegg and Peterson, 2003), and
search and rescue (Furukawa et al., 2006). Over the
past decade, significant public and private investment
has been made in the areas of autonomous underwa-
ter vehicles and autonomous surface vehicles (Man-
ley, 2008; Douglas-Westwood, 2012). The focus has
largely been on single-robot systems with a high de-
gree of hardware and software complexity. While
these systems have been applied to a variety of sce-
narios and have proven commercially viable (see,
for instance, offerings by Kongsberg
1
, Autonomous
Surface Vehicles Ltd
2
, and Bluefin Robotics
3
), they
are expensive and limited in terms of the tasks they
can undertake. In particular, tasks involving mon-
itoring, searching, or data collection over large ar-
eas typically require distributed sensing capabilities.
Distributed sensing can only be achieved by systems
composed of multiple, physically independent units
such as swarms of aquatic drones.
Land-based and air-based swarm robotics sys-
tems have been studied extensively, see Dorigo et al.
(2013); Lindsey et al. (2012) for examples, but the
same does not hold true for swarms for aquatic en-
vironments. While there have been numerous con-
ceptual studies on systems composed of multiple au-
tonomous vehicles for aquatic environments, only a
limited number of such systems have been realized.
The EU-ICT project CoCoRo (Schmickl et al., 2011)
is among a few exceptions. CoCoRo concerns the de-
sign and development of a swarm of autonomous un-
1
http://www.kongsberg.com/
2
http://www.asvglobal.com/
3
http://www.bluefinrobotics.com
derwater vehicles for deep-sea exploration. CoCoRo
uses custom-built robots and bio-inspired algorithms
for underwater tasks. One of the goals of CoCoRo
is to contribute to fields such as biology and meta-
cognition. The aim of our HANCAD and CORATAM
projects, on the other hand, is to address the key chal-
lenges related to the application of large-scale swarms
of aquatic drones in real-world scenarios.
Swarms of autonomous aquatic drones have sev-
eral potential real-world applications. Coastal coun-
tries have, for instance, faced an increased spending
on maritime missions over the years. In Italy, the
problem of illegal immigration (Monzini, 2007) and
organized crime (Lutterbeck, 2006) has contributed
to the growth of the Guardia di Finanza’s operation.
In 2013, the operation’s budget
4
amounted to $4.08B
and it employed 302 boats, 86 helicopters, and 16
airplanes, as well as a total of 59,335 military per-
sonnel (Carta, 2013). In Spain, immigrants cross-
ing the Gibraltar Strait through Morocco led to the
implementation of the Sistema Integrado de Vigilan-
cia Exterior (SIVE) in the late 1990s (Lutterbeck,
2006). SIVE relies on military-grade technology such
as fixed and mobile radars, infrared sensors, and tra-
ditional aquatic and aerial vehicles. Such surveillance
and intruder detection tasks could potentially bene-
fit from large-scale autonomous robotic swarms. Fur-
thermore, autonomous drones could be used for non-
military operations, such as aquaculture inspection,
environmental monitoring, and disaster relief.
In the HANCAD and CORATAM projects, we
will design and implement communication and con-
trol strategies for swarms of relatively simple and in-
expensive surface drones. Drones will be able to com-
municate through an ad-hoc heterogeneous wireless
network. The communication system will allow a re-
mote human operator to maintain a connection with
the swarm at all times through a subset of drones
equipped with long-range communication hardware.
We will use a novel approach that combines evo-
lutionary robotics techniques with manual engineer-
ing (Duarte et al., 2014a) to synthesize control semi-
automatically. The hybrid technique has the poten-
tial to combine the respective strengths of artificially
evolving control (Nolfi and Floreano, 2000), namely
the automatic synthesis of self-organized behavior,
with the benefits of flexible, engineering-oriented ap-
proaches in which the experimenter has fine-grained
control over behavior.
The primary contribution of the projects will be
threefold: (i) we will develop a scalable, heteroge-
neous, and fault-tolerant ad-hoc network architecture
4
http://www.rgs.mef.gov.it/VERSIONE-I/Dati/
OPENDATA/SpeseBS/
DesignofCommunicationandControlforSwarmsofAquaticSurfaceDrones
549
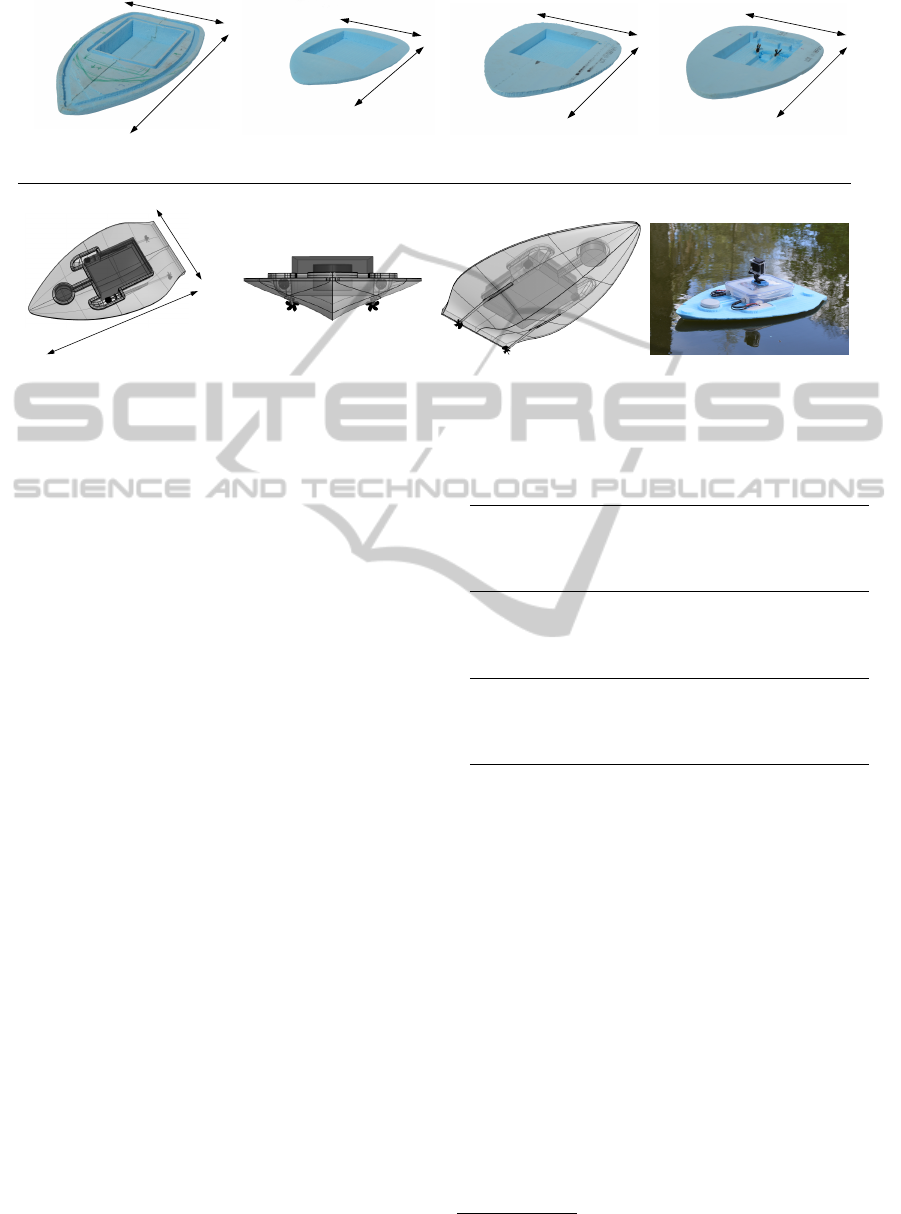
39 cm
75 cm
58 cm
33 cm
39 cm
62 cm
39 cm
62 cm
Prototype I Prototype II Prototype III Prototype IV
40 cm
65 cm
Prototype V Prototype V Prototype V Prototype V
(above) (front) (below) (in water)
Figure 1: Top: Prototype I-IV, bottom: Prototype V, the current iteration of the aquatic drone prototype.
for swarms of aquatic drones, (ii) we will explore our
novel approach to control synthesis in a variety of
real-world maritime tasks, such as patrolling and in-
truder detection, environmental monitoring, or infras-
tructure inspection, and (iii) we will release all soft-
ware and hardware as open-source, which will allow
other researchers to build their own aquatic drones,
and to advance the state-of-the-art with respect to the
application of autonomous drones for maritime tasks.
3 HARDWARE
One of the main goals of the HANCAD and
CORATAM projects is to build prototype hardware
to serve as a platform for research and development
of swarms of aquatic drones. The platform is planned
to be orders of magnitude cheaper to build (< 1000
EUR per unit) than current commercial unmanned
surface vehicle, relatively small (< 1 meter in length),
and easy to manufacture to allow for large-scale de-
ployment of drones in swarms of hundreds of units
or more. We use widely available hardware, and
off-the-shelf sensors and motors. Prototype drones
will be developed based on open-source hardware and
open-source software. Digital manufacturing tech-
niques will be used in order to keep costs low and
facilitate adaptation and replication by third-parties.
Schematics, 3D models, and source code are available
at http://biomachineslab.com/aquaticdrone.
We use the Raspberry Pi (Upton and Halfacree,
2013) as the main computing device of each drone.
GPS receivers and compasses will provide each drone
Table 1: List of hardware in Prototype V.
Control
Raspberry Pi Model B, 512Mb RAM
Kingston 16Gb SD card Class 10
TP-Link TL-WN722N high-gain 150Mbps wireless dongle
Propulsion
Two 2213N 800Kv Brushless Motor motors
Two Turnigy TrackStar 25A speed controllers
Two 4mm Drive Shaft and 255mm Boat Shaft Sleeve
Power
ZIPPY Flightmax 8000mAh 3S1P 30C (for motors)
ZIPPY Flightmax 5000mAh 3S1P 40C (for everything else)
Turnigy 5A SBEC switching DC-DC regulator
Sensors
Sparkfun MAG3110 triple axis magnetometer
Adafruit GPS breakout (based on the MTK3339 chipset)
with localization and orientation information. The
drones can be further augmented with sensors for en-
vironmental monitoring, sea life detection, and other
task-specific equipment, which can be used in parallel
with the drone’s camera to demonstrate the potential
of collectives of aquatic drones.
3.1 Preliminary Results and Ongoing
Work
We have experimented with different designs of the
drone hull to achieve a good balance between hydro-
dynamic properties, size, and manufacturability. Cur-
rently, we have gone through five iterations of the
hull design, see Figure 1. In each iteration, we first
designed and modeled a prototype in Rhinoceros
5
,
5
http://www.rhino3d.com/
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
550

and the design was then manufactured in extruded
polystyrene foam (XPS) using a 3-axis computer nu-
merical control milling machine. The use of XPS has
three main advantages, namely: (i) it is a relatively
inexpensive material, (ii) it has a low mass density
and it is not porous, and (iii) XPS is easily machin-
able. Furthermore, we also tested a variety of off-the-
shelf components to be used in the drones’ propulsion
system, such as shafts, motors, and speed controllers.
Other components of the robot are 3D printed, such
as motor mounts and propellers. In the current pro-
totype (Prototype V), we use the hardware listed in
Table 1. The total cost of a Prototype V unit is ∼ 260
EUR. In our ongoing work, we are equipping the
drones with additional hardware such as retractable
nets and water quality sensors, as well as a number of
communication technologies, namely Wi-Fi, ZigBee,
and WiMAX. In the longer term, we will give drones
the capacity to extend their operational autonomy by
equipping them with onboard photovoltaic panels.
4 COMMUNICATION
One of the main goals of the projects is to enable
swarms of drones to operate as a robust wireless sen-
sor network (WSN) where each node is embedded on
a low-cost aquatic drone. Mobile ad-hoc networks
(MANETs) have been widely studied, see Ko and
Vaidya (2000); Chlamtac et al. (2003); Akyildiz et al.
(2005) for examples. Studies on MANETs are typ-
ically conducted on systems in which nodes are ei-
ther confined to a relatively small area, or present
at densities high enough to practically ensure net-
work connectivity between any two nodes regard-
less of movement, e.g. Sibley et al. (2002). Sce-
narios in open environments in which mobile nodes
must move to ensure connectivity have been studied.
However, the tasks were limited to either maintain-
ing network connectivity, or establishing connectiv-
ity between two fixed points. In Winfield (2000),
for instance, a swarm of robots must remain aggre-
gated based on connections formed over a low-range
wireless network, while in Hauert et al. (2009), aerial
robots must self-organize to establish and maintain
a wireless network between operators located on the
ground.
Distributed sensing over extended periods of time
is necessary for several maritime tasks such as pa-
trolling and environmental monitoring. In our design
of the communication system, we therefore prioritize
autonomy and robustness. To keep the per-unit cost
low, we will furthermore use a heterogeneous sys-
tem of drones: the majority of the drones will only
be equipped with relatively short-range communica-
tion equipment, while a few, more complex drones,
will also be equipped with long-range communica-
tion equipment and larger, more expensive batteries.
All drones will participate in task execution. The
drones with long-range communication capabilities
will serve as gateways through which observations
can be communicated to human operators and through
which operators can issue new instructions. We ex-
pect the ratio between the number of simple drones
and the number of complex drones to be between 10:1
and 25:1 depending on mission requirements.
Long-range communication can be achieved us-
ing high-gain Wi-Fi, 3G/GPRS, WiMAX, LTE, or
similar technologies. For missions in which drones
need to operate outside the range of terrestrial net-
works, satellite links could be used. In the HANCAD
and CORATAM projects, we are experimenting with
high-gain Wi-Fi and WiMAX.
Local drone-to-drone communication can be
achieved through a number of existing technologies.
In our projects, we will experiment with ZigBee and
Wi-Fi, but the specific technology used to establish
links between neighboring drones and to push data
across can be chosen depending on mission require-
ments. The key challenge related to the local drone-
to-drone communication is to attain mesh-networking
topologies that support the dynamic routing between
drones with only local communication capabilities
and gateway drones. Although there are several ad-
hoc routing protocols for networks with changing
topologies, we furthermore have to implement op-
portunistic routing and dissemination: some drones
can temporarily be outside the range of the rest of
the swarm due to mission requirements and limited
communication range. The aquatic environment also
poses delivery challenges due to the signal reflec-
tions, which must be taken into account in the routing
and dissemination protocols. We will develop a cus-
tom software layer on top of the low-level wireless
protocols to increase robustness and to support reli-
able connections across an ad-hoc network with con-
stantly changing topology and occasional signal re-
flections. A comprehensive survey of the challenges
and proposed solutions for using wireless communi-
cation technologies in sensor networks deployed in
marine environments is presented in Xu et al. (2014).
Scenarios in which aquatic drones operate in open
maritime environments are challenging because their
task is not only to maintain network connectivity, but
also to carry out missions that can put constraints on
the spatial configuration and motion of the drones.
The heterogeneous nature of the system must be taken
into account to ensure that drones with long-range
DesignofCommunicationandControlforSwarmsofAquaticSurfaceDrones
551

communication capabilities are accessible to the en-
tire swarm. The distance between any drone with
only local communication capabilities and a drone
with long-range communication capabilities should
be kept as short as possible to ensure reliable and
timely communication with human operators. If an
intruder is detected in a patrolling scenario, for in-
stance, it is important that human operators are noti-
fied and can issue new instructions immediately. In
our ongoing work, we are studying the interplay be-
tween behavior and communication, as well as con-
ducting communication tests in real hardware.
5 CONTROL
Centralized control of multirobot systems, such as
swarms of aquatic drones, is attractive because plan-
ning, coordination and monitoring can be done based
on global knowledge of the system. However, com-
putational and/or communication constraints on the
robots may prevent centralized control (Crespi et al.,
2008). Moreover, centralized systems tend to be sub-
ject to scalability constraints and to be vulnerable
given that the central coordinator represents a single
point of failure. Systems based on decentralized con-
trol, on the other hand, do not have a single point of
failure, and when coordination is achieved through lo-
cal interactions, they tend to scale well, see for ex-
ample Christensen et al. (2009). Decentralized con-
trol based on self-organization is, however, difficult
to design by hand because the behavioral rules for
individual robots cannot be derived from a desired
macroscopic behavior (Dorigo et al., 2004). In the
domain of large-scale, decentralized robot collectives,
the complexity stemming from the intricate dynam-
ics required to produce self-organized behavior fur-
ther complicates the hand-design of control systems.
In the field of evolutionary robotics (ER), evolu-
tionary techniques are applied to automate the de-
sign of control systems for robots (Nolfi and Flore-
ano, 2000). ER techniques can be employed to syn-
thesize decentralized control for multirobot systems,
see Floreano and Keller (2010); Sperati et al. (2008)
for examples. Over the years, researchers have identi-
fied certain challenges associated with the application
of ER. One of the most prevalent challenges concerns
bootstrapping the evolutionary process in complex
tasks. If controllers for a relatively complex task are
sought, evolution may be unable to find a fitness gra-
dient that leads to adequate solutions (Nelson et al.,
2009). Another challenge is the use of evolved con-
trol in real hardware. Except for a few cases in which
evolution is conducted directly on real hardware (see,
for instance Watson et al. (1999)), the evolution of
robotic controllers is conducted offline, in simulation,
due to the large number of evaluation necessary to
obtain capable controllers. Simulation-specific fea-
tures, which are not present in the real world, may be
exploited by evolution. As a consequence, the pro-
cess of transferring evolved controllers to real robotic
hardware, known as crossing the reality gap, typically
fails to preserve the level of performance achieved in
simulation (Jakobi, 1997).
Unless very simple tasks are considered, it is dif-
ficult to foresee which evolutionary setup might be
suitable for solving a particular task (Christensen
and Dorigo, 2006). Between the controller, fitness
function, and evolutionary algorithm, many differ-
ent combinations of settings are possible. It then
becomes necessary to run the computationally in-
tensive evolutionary process, often multiple times
with different initial conditions, to assess if a par-
ticular setup produces useful solutions. This leads
to a time-consuming trial-and-error process. While
a few studies have been conducted in which evolu-
tion was applied in a more engineered-oriented man-
ner, such attempts have, so far, been ad-hoc (Silva
et al., 2014). Techniques such as incremental evo-
lution (Gomez and Miikkulainen, 1997), incremen-
tal robot shaping (Urzelai et al., 1998), and task-
decomposition (Lee, 1999; Whiteson et al., 2005)
have been proposed, but such approaches do not ad-
dress the semi-automatic synthesis of behavior in a
systematic way.
In our projects, we use a novel, hybrid ap-
proach (Duarte et al., 2014a) in which the above-
mentioned challenges are addressed by systemati-
cally combining artificial evolution, manual engineer-
ing, and hierarchical decomposition of behavior. By
adopting such an approach, we expect to be able to
obtain scalable and robust decentralized control for
large-scale swarms of aquatic drones.
5.1 Preliminary Results and Ongoing
Work
We have studied a task in which a swarm of up to
1,000 simulated aquatic drones (Duarte et al., 2014b)
had to patrol a 20 km-long coastal strip of the island of
Lampedusa, see Figure 2. We applied our hybrid ap-
proach (Duarte et al., 2014a) for synthesis of control,
in which a complete mission can be broken down into
a number of simpler sub-tasks until evolution or a hu-
man designer can find suitable behaviors. Individual
behavior primitives are simple behaviors that are syn-
thesized to solve particular sub-tasks. These behavior
primitives are then combined hierarchically using be-
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
552

Pursue Intruder
Behavior PrimitiveBehavior Primitive
PatrolGo To Waypoint
Behavior Primitive
Top Level
Behavior Arbitrator
Recharge
low
battery
low
battery
charged
Intruder
Pursue
Waypoint
Go To
no intruder
for 5 min
within 10 meters
of waypoint
intruder
detected/alert
Patrol
battery
(a) (b)
Figure 3: Representation of: (a) the hierarchical controller, with one preprogrammed behavior arbitrator and three evolved
behavior primitives, and (b) the behavior arbitrator, a preprogrammed finite state machine.
Figure 2: A 20 km-long patrolling zone was used in
simulation-based experiments (Duarte et al., 2014b) where
up to 1,000 aquatic drones had to execute an intruder de-
tection task. The chosen patrolling zone would be enough
to cover the south coast of the island Lampedusa, a major
illegal immigration hub.
havior arbitrators, which are decision nodes that del-
egate control to their sub-controllers. For the patrol
task, we evolved three behavior primitives: “Go To
Waypoint”, “Patrol”, and “Pursue Intruder”. After the
behavior primitives had been evolved, we combined
them using a simple state-based preprogrammed arbi-
trator, see Figure 3. Our initial experiments demon-
strated that scalable and self-organized control could
be evolved for large swarms operating in an open mar-
itime environment (Duarte et al., 2014b).
Controllers for more complex tasks can have mul-
tiple hierarchical layers of both evolved and prepro-
grammed nodes, allowing for detailed control over
behavior. A collection of evolved behaviors can thus
be built and potentially reused in different missions.
Robotic control for complex tasks can be synthesized
in an incremental and hierarchical manner by combin-
ing successfully previously evolved/preprogrammed
behaviors, while issues related to performance on real
hardware can be addressed at each increment. In this
way, our approach (Duarte et al., 2014a) circumvents
two fundamental issues associated with the applica-
tion of evolutionary robotics, namely: (i) bootstrap-
ping the evolutionary process, and (ii) crossing the
reality gap.
6 CONCLUSIONS
The aim of the HANCAD and CORATAM projects
is to study how the fundamental challenges related
to communication and control in swarms of aquatic
drones can be overcome. We have built five hard-
ware prototypes, we have proposed a heterogeneous
networking architecture, and we have conducted the
first study on the synthesis of scalable, self-organized
behaviors or drones operating in an open maritime en-
vironment.
We are currently finalizing the design of the hard-
ware, and we expect to conduct the first experiments
on a swarm of real drones before the end of 2014.
By the summer 2015, we expect to have demon-
strated a system up to 25 operational drones car-
rying out proof-of-concept tasks such as patrolling
and environmental monitoring in water. All soft-
ware and hardware will be made freely available at
http://biomachineslab.com/aquaticdrone.
6.1 Future Work
In our ongoing work, we continue to study ways in
which to increase the capabilities of the drones while
still keeping them simple. The simpler the drone, the
lower per-unit cost, which in turn allows for wider
adoption and/or larger deployments. One of the ways
in which the capabilities of drones with relatively sim-
ple sensory equipment can be augmented is through
DesignofCommunicationandControlforSwarmsofAquaticSurfaceDrones
553

the mutual sharing of sensory data through local, sit-
uated communication (Rodrigues et al., 2015). The
sharing of onboard sensory data between neighbor-
ing robots allows individual drones to combine in-
formation from multiple sources to obtain informa-
tion about the environment that would otherwise not
be available. The received information can even be
used to implement collective virtual sensors, which
an evolved controller can use as if they were regular
onboard sensors. Initial experiments with collective
sensors have produced promising results (Rodrigues
et al., 2015).
The limited onboard sensing and processing capa-
bilities may make it difficult for drones to navigate
in cluttered environments such as lakes and rivers.
To overcome this limitation, the drones could use of-
fline generated semantic maps of the environment.
A typical semantic map will indicate which regions
of the aquatic environment are closer to the margin,
whereas another will pinpoint which regions corre-
spond to shallow waters. The semantic maps could
be constructed at the beginning or prior to a mission
using a single or a few, sophisticated vessels such as
the Riverwatch (Pinto et al., 2014).
As part of our more long-term efforts, we are de-
veloping state-of-the-art methods such as the applica-
tion cooperative co-evolution driven by behavioral di-
versity instead of a traditional fitness function (Gomes
et al., 2014) to synthesize behaviors that enable het-
erogeneous swarms of drones to maintain connectiv-
ity while executing tasks, and online learning in large-
scale decentralized systems (Silva et al., 2012).
ACKNOWLEDGEMENTS
This work was supported by Fundac¸
˜
ao para a
Ci
ˆ
encia e a Tecnologia (FCT) under the grants,
SFRH/BD/76438/2011, SFRH/BD/89573/2012,
SFRH/BD/89095/2012, PEst-OE/EEI/LA0008/2013,
and EXPL/EEI-AUT/0329/2013.
REFERENCES
Akyildiz, I. F., Wang, X., and Wang, W. (2005). Wire-
less mesh networks: a survey. Computer Networks,
47(4):445–487.
Brambilla, M., Ferrante, E., Birattari, M., and Dorigo, M.
(2013). Swarm robotics: a review from the swarm
engineering perspective. Swarm Intelligence, 7(1):1–
41.
Carta, C. L. (2013). Rapporto annuale. Technical report,
Corpo della Guardia di Finanza, Rome, Italy.
Chlamtac, I., Conti, M., and Liu, J. J.-N. (2003). Mobile ad
hoc networking: imperatives and challenges. Ad Hoc
Networks, 1(1):13–64.
Christensen, A. L. and Dorigo, M. (2006). Incremental
evolution of robot controllers for a highly integrated
task. In 9th International Conference on Simulation of
Adaptive Behaviour (SAB), pages 473–484. Springer,
Berlin, Germany.
Christensen, A. L., O’Grady, R., and Dorigo, M. (2009).
From fireflies to fault tolerant swarms of robots. IEEE
Transactions on Evolutionary Computation, 13(4):1–
12.
Clark, C. M., Olstad, C. S., Buhagiar, K., and Gambin, T.
(2008). Archaeology via underwater robots: Map-
ping and localization within maltese cistern systems.
In 10th International Conference on Control, Automa-
tion, Robotics and Vision (ICARCV), pages 662–667.
IEEE Press, Piscataway, NJ.
Clegg, D. and Peterson, M. (2003). User operational evalua-
tion system of unmanned underwater vehicles for very
shallow water mine countermeasures. In OCEANS
2003, pages 1417–1423. IEEE Press, Piscataway, NJ.
Crespi, V., Galstyan, A., and Lerman, K. (2008). Top-
down vs bottom-up methodologies in multi-agent sys-
tem design. Autonomous Robots, 24(3):303–313.
Dorigo, M., Floreano, D., Gambardella, L. M., Mondada,
F., Nolfi, S., Baaboura, T., Birattari, M., Bonani, M.,
Brambilla, M., Brutschy, A., et al. (2013). Swar-
manoid: a novel concept for the study of heteroge-
neous robotic swarms. IEEE Robotics & Automation
Magazine, 20(4):60–71.
Dorigo, M., Trianni, V., S¸ahin, E., Groß, R., Labella, T. H.,
Baldassarre, G., Nolfi, S., Deneubourg, J.-L., Mon-
dada, F., Floreano, D., et al. (2004). Evolving self-
organizing behaviors for a swarm-bot. Autonomous
Robots, 17(2-3):223–245.
Douglas-Westwood (2012). The world AUV market report
2012-2016. Technical report, Douglas-Westwood Ltd.
Faversham, UK.
Duarte, M., Oliveira, S. M., and Christensen, A. L. (2014a).
Evolution of hybrid robotic controllers for complex
tasks. Journal of Intelligent and Robotic Systems. In
press.
Duarte, M., Oliveira, S. M., and Christensen, A. L. (2014b).
Hybrid control for large swarms of aquatic drones.
In 14th International Conference on the Synthesis &
Simulation of Living Systems (ALIFE), pages 785–
792. MIT Press, Cambridge, MA.
Floreano, D. and Keller, L. (2010). Evolution of adaptive
behaviour in robots by means of Darwinian selection.
PLoS Biology, 8(1):e1000292.
Furukawa, T., Bourgault, F., Lavis, B., and Durrant-Whyte,
H. F. (2006). Recursive Bayesian search-and-tracking
using coordinated UAVs for lost targets. In 2006 IEEE
International Conference on Robotics and Automation
(ICRA), pages 2521–2526. IEEE Press, Piscataway,
NJ.
Gomes, J., Mariano, P., and Christensen, A. L. (2014).
Avoiding convergence in cooperative coevolution with
novelty search. In 13th International Conference
on Autonomous Agents and Multiagent Systems (AA-
MAS), pages 1149–1156, IFAAMAS, Richland, SC.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
554

Gomez, F. and Miikkulainen, R. (1997). Incremental evolu-
tion of complex general behavior. Adaptive Behavior,
3-4(5):317–342.
Hauert, S., Zufferey, J., and Floreano, D. (2009). Evolved
swarming without positioning information: an appli-
cation in aerial communication relay. Autonomous
Robots, 26(1):21–32.
Jakobi, N. (1997). Evolutionary robotics and the radi-
cal envelope-of-noise hypothesis. Adaptive Behavior,
6(2):325–368.
Ko, Y.-B. and Vaidya, N. H. (2000). Location-aided routing
(lar) in mobile ad hoc networks. Wireless Networks,
6(4):307–321.
Lane, D. M., Davies, J. B. C., Casalino, G., Bartolini, G.,
Cannata, G., Veruggio, G., Canals, M., Smith, C.,
O’Brien, D. J., Pickett, M., et al. (1997). Amadeus:
advanced manipulation for deep underwater sampling.
IEEE Robotics & Automation Magazine, 4(4):34–45.
Lee, W.-P. (1999). Evolving complex robot behaviors. In-
formation Sciences, 121(1-2):1–25.
Lindsey, Q., Mellinger, D., and Kumar, V. (2012). Con-
struction with quadrotor teams. Autonomous Robots,
33(3):323–336.
Lutterbeck, D. (2006). Policing migration in the mediter-
ranean. Mediterranean Politics, 11(1):59–82.
Manley, J. E. (2008). Unmanned surface vehicles, 15 years
of development. In OCEANS 2008, pages 1–4. IEEE
Press, Piscataway, NJ.
Monzini, P. (2007). Sea-border crossings: The organization
of irregular migration to italy. Mediterranean Politics,
12(2):163–184.
Nelson, A. L., Barlow, G. J., and Doitsidis, L. (2009).
Fitness functions in evolutionary robotics: A survey
and analysis. Robotics and Autonomous Systems,
57(4):345–370.
Nolfi, S. and Floreano, D. (2000). Evolutionary robotics:
The biology, intelligence, and technology of self-
organizing machines. MIT Press, Cambridge, MA.
Pinto, E., Marques, F., Mendonc¸a, R., Lourenc¸o, A., San-
tana, P., and Barata, J. (2014). An autonomous
surface-aerial marsupial robotic team for riverine en-
vironmental monitoring: Benefiting from coordinated
aerial, underwater, and surface level perception. In
2014 IEEE International Conference on Robotics and
Biomimetics (ROBIO). IEEE Press, Piscataway, NJ. In
press.
Plueddemann, A., Packard, G., Lord, J., and Whelan, S.
(2008). Observing arctic coastal hydrography using
the REMUS AUV. In 2008 IEEE/OES Conference on
Autonomous Underwater Vehicles (AUV), pages 1–4.
IEEE Press, Piscataway, NJ.
Rodrigues, T., Duarte, M., Oliveira, S. M., and Chris-
tensen, A. L. (2015). Beyond onboard sensors in
robotic swarms: Local collective sensing through sit-
uated communication. In 7th International Confer-
ence on Agents and Artificial Intelligence (ICAART).
SciTePress, Lisbon, Portugal. In press.
Schmickl, T., Thenius, R., Moslinger, C., Timmis, J.,
Tyrrell, A., Read, M., Hilder, J., Halloy, J., Campo,
A., Stefanini, C., et al. (2011). CoCoRo – The self-
aware underwater swarm. In 5th IEEE Conference
on Self-Adaptive and Self-Organizing Systems Work-
shops (SASO), pages 120–126. IEEE Press, Piscat-
away, NJ.
Sibley, G. T., Rahimi, M. H., and Sukhatme, G. (2002).
Robomote: A tiny mobile robot platform for large-
scale ad-hoc sensor networks. In 2002 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1143–1148. IEEE Press, Piscataway,
NJ.
Silva, F., Duarte, M., Oliveira, S. M., Correia, L., and Chris-
tensen, A. L. (2014). The case for engineering the
evolution of robot controllers. In 14th International
Conference on the Synthesis & Simulation of Living
Systems (ALIFE), pages 703–710. MIT Press, Cam-
bridge, MA.
Silva, F., Urbano, P., Oliveira, S., and Christensen, A. L.
(2012). odNEAT: An algorithm for distributed online,
onboard evolution of robot behaviours. In 13th Inter-
national Conference on the Simulation & Synthesis of
Living Systems (ALIFE), pages 251–258. MIT Press,
Cambridge, MA.
Sperati, V., Trianni, V., and Nolfi, S. (2008). Evolving co-
ordinated group behaviours through maximisation of
mean mutual information. Swarm Intelligence, 2(2-
4):73–95.
Upton, E. and Halfacree, G. (2013). Raspberry Pi user
guide. John Wiley & Sons, Hoboken, NJ.
Urzelai, J., Floreano, D., Dorigo, M., and Colombetti, M.
(1998). Incremental robot shaping. Connection Sci-
ence, 10(3-4):341–360.
Watson, R., Ficici, S., and Pollack, J. (1999). Embodied
evolution: Embodying an evolutionary algorithm in a
population of robots. In 1999 IEEE Congress on Evo-
lutionary Computation (CEC), pages 335–342. IEEE
Press, Piscataway, NJ.
Whiteson, S., Kohl, N., Miikkulainen, R., and Stone, P.
(2005). Evolving keepaway soccer players through
task decomposition. Machine Learning, 59(1):5–30.
Winfield, A. F. (2000). Distributed sensing and data collec-
tion via broken ad hoc wireless connected networks
of mobile robots. In Distributed Autonomous Robotic
Systems 4 (DARS), pages 273–282. Springer, Berlin,
Germany.
Xu, G., Shen, W., and Wang, X. (2014). Applications of
wireless sensor networks in marine environment mon-
itoring: A survey. Sensors, 14(9):16932–16945.
Yan, R., Pang, S., Sun, H., and Pang, Y. (2010). Develop-
ment and missions of unmanned surface vehicle. Jour-
nal of Marine Science and Application, 9:451–457.
DesignofCommunicationandControlforSwarmsofAquaticSurfaceDrones
555
