
Butler-ising HomeManager: A Pervasive Multi-Agent System for Home
Intelligence
Enrico Denti and Roberta Calegari
Dipartimento di Informatica - Scienza e Ingegneria (DISI), Alma Mater Studiorum—Universit
`
a di Bologna, Bologna, Italy
Keywords:
Home Management, Ambient Intelligence, Pervasive Computing, Energy Saving, Smart Homes, Smart
Living, Coordination Infrastructures, Multi-Agent Systems, Gamification.
Abstract:
Home Manager is an agent-based application for the control of an intelligent home, where the house is seen
as an intelligent environment made of independent devices that participate to an agent society. The society
is governed by a coordination infrastructure aimed at satisfying the users goals and preferences (lighting,
temperature, etc.) while achieving the global house policies and objectives (e.g. energy saving) in a highly-
configurable way. In the existing prototype, designed mostly to prove the feasibility and effectiveness of the
above approach, the testbed house was kept intentionally simple, with a limited number of rooms, user types,
control devices and policies, and the infrastructure implementation lacked some features.
The recent, widespread adoption of smart mobile devices (smartphones, tablets) enabling mobile connectivity
has dramatically changed the reference scenario: users now expect at least to be able to monitor, and possibly
control, their home devices in mobility, and in fact all major vendors now offer some app for this purpose. Yet,
this is just the basic step: exploiting the situated connectivity enabled by GPS and the other geo-localisation
techniques embedded in today’s smartphones, novel pervasive scenarios can be devised that could not even
be imagined in the past years. This aspect is developed in the Butlers architecture, which provides a general
framework and reference model for intelligent home management where the smart home is managed by an
intelligent butler and interacts with its inhabitants taking into account their habits, behavior, location, prefer-
ences and any other sort of information to anticipate their needs and support their goals.
In this context, this paper presents the novel “Butler-ised” Home Manager, that evolves the previous system
in the Butlers perspective: the new prototype not only supports the remote control of the house appliances via
an Android app, but exploits the user position, tracked via geo-localisation, to anticipate the user’s needs in a
simple, yet significant, scenario – namely, autonomously switching the house oven on when discovering that
the user has just bought a take-away pizza in his/her way back home.
1 INTRODUCTION
Technology evolution is making the appliances that
populate our homes smarter and connected: it is
common to find TV sets, air conditioners, washing
machines, refrigerators, etc. networked and often
remote-controlled, typically via an app for Android or
iOS smartphones so that integration frameworks are
being proposed (Google, 2014; Apple, 2014).
These trends are enlarging the application per-
spectives of “traditional” home automation in the con-
sumer market, merging aspects from Ambient Intel-
ligence (AmI) (Ducatel et al., 2001; Ayala et al.,
2013), smart environments (Bartolini et al., 2012), en-
ergy monitoring (Innova, 2012; World, 2013) and do-
motics (Ch
´
e et al., 2010; Menon et al., 2013) to focus
onto people’s needs from different viewpoints (Chong
and Mastrogiovanni, 2011).
In Ambient Intelligence, the emphasis is on user-
friendliness, user-empowerment, and support for hu-
man interaction: the home environment is “smart” in
that it can handle some aspects (e.g. lighting, heating)
based on the user’s preferences, so as to improve the
quality of life. This is why it is often found in “as-
sisted living” applications, whose aim is to support
specific user categories (elderly, disabled, etc).
Recent works, like (Denti, 2014), emphasise that
there is an extra value in considering all these aspects
together: novel, intriguing scenarios are devised that
could not even be imagined in the past years. In such
new scenarios, the smart home can interact with its
inhabitants not only to monitor and remote-control
the home appliances, but also to take into account
the users’ habits, behavior, location, preferences and
any other sort of information to anticipate their needs
and overall support their goals. The basic idea is that
knowing the user’s habits and observing his/her daily
behavior via mobile devices – in particular his/her
Denti E. and Calegari R..
Butler-ising HomeManager - A Pervasive Multi-Agent System for Home Intelligence.
DOI: 10.5220/0005284002490256
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 249-256
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

location, thanks to the situated connectivity enabled
by GPS and the other geo-localisation techniques –
can enable an intelligent system (the home butler)
to take autonomous decisions and possibly anticipate
the users’ needs, managing the home devices on the
user’s behalf. In (Denti, 2014), these aspects are
put in context with other research results from in-
telligent agents, multi-agent systems (mainly in the
area of power generation and consumption (Tolbert
et al., 2001), power restoration (Nagata et al., 2000),
load management in power grid systems (Zhang et al.,
2011)), and coordination technologies (Papadopou-
los and Arbab, 1998; Omicini and Papadopoulos,
2001; Busi et al., 2001), on the one side, and “enter-
tainment” aspects, in the gamification (Gamification
Community, 2013) perspective, on the other – the lat-
ter being more and more recognised as a key factor
between success and failure in technology acceptance
from the consumers’ viewpoint.
Home Manager (Molesini et al., 2009) is a pro-
totype agent-based application for the control of an
intelligent home, where the house is seen as an intel-
ligent environment made of independent devices that
participate to an agent society: the system aims to
manage the overall energy consumption while sup-
porting the user’s living and activities inside the
house. The agent society is governed by the TuCSoN
coordination infrastructure (Omicini and Zambonelli,
1999; Ricci et al., 2002; Omicini and Rimassa, 2004;
Mariani and Omicini, 2014; TuCSoN, 2008) and tries
to satisfy the user’s goals and preferences as concerns
the lighting and room temperature, while achieving
the global house policies and objectives. Since the
above prototype was designed mostly to prove the fea-
sibility and effectiveness of the approach, the testbed
house was kept intentionally simple, with a limited
number of rooms and user categories, and a small set
of home appliances and policies; moreover, the im-
plementation was rooted on TuCSoN 1.4, where some
relevant features were not fully available.
In the Butlers (Denti, 2014) perspective, Home
Manager can be seen as an early implementation of
a small subset of the full architecture – in particular,
with no support for mobility and pervasive aspects.
Accordingly, this paper presents the new “Butler-
ised” Home Manager—the evolution of the previous
system in the Butlers perspective: the new prototype
not only supports the remote control of the house ap-
pliances via an Android app, but exploits the user po-
sition, tracked via geo-localisation, to anticipate the
user’s needs in a simple, yet significant, scenario –
namely, autonomously switching the house oven on
when discovering that the user has just bought a take-
away pizza in his/her way back home.
So, after shortly summarising Home Manager
(Section 2), the Butlers vision (Section 3), and the
TuCSoN infrastructure (Section 4), we present the
new Home Manager system (Section 5), from the
main requirements to the implementation, with the
related discussion (Section 6). Related work and con-
clusions are reported in Sections 7 and 8, respectively.
2 HOME MANAGER
Home Manager (Molesini et al., 2009) is a prototype
application for the control of an intelligent home, de-
signed as a multi-agent system via the SODA method-
ology (SODA, 2008) and implemented on top of the
TuCSoN coordination infrastructure (TuCSoN, 2008).
The system considers a house with independent
devices (air conditioners, lights, etc.), each equipped
with an agent to participate to the agent society. The
coordination infrastructure, programmable via tuple
centres, embeds the coordination laws required both
to mediate among the different user’s preferences and
to pursue the overall system goals – in this case, to
manage (limit) the overall energy consumption.
The system tries to satisfy the user preferences
in terms of room lighting and temperature, unless
higher-order energy constraint are violated; if multi-
ple users with different preferences are in the same
room, it also mediates among them by applying some
suitable global policy. It features a rather complete
role-based model, and a (pc-based) graphical user in-
terface to configure and use the system with no need
to operate directly on the underlying infrastructure.
Coherently with its proof-of-concept nature, the
testbed was kept intentionally simple: no real mobil-
ity aspects were included (users were only considered
inside the house), no remote control capabilities were
supported, and the user’s profile was limited. Also,
there was no idea of anticipating any user need or de-
sire – because “anticipating” an action requires to be
informed of what is occurring, and where.
More recently, the Home Manager system has
been re-interpreted, given its goals and features, in the
Butlers perspective (briefly summarised in the next
section), positioning the prototype in the Butlers con-
ceptual reference layers (reported, with the author’s
permission, in Figure 1 for the reader’s convenience).
3 THE BUTLERS VISION
The Butlers architecture (Denti, 2014) defines a
framework with seven conceptual layers, which re-
late the availability of physical devices and enabling
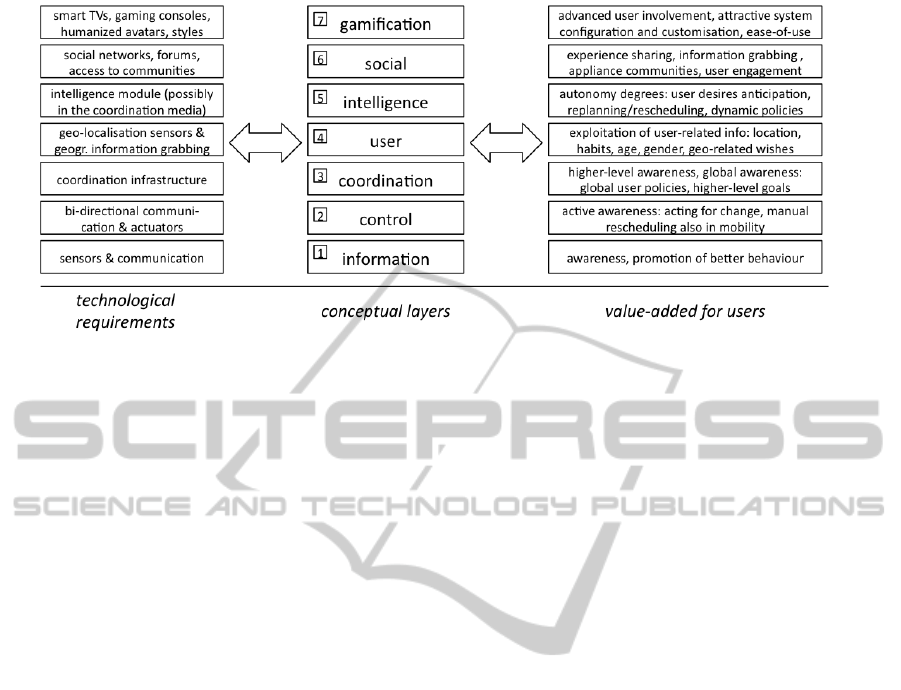
Figure 1: Butlers multi-layer reference architecture.
technologies with the set of features that a home man-
agement system can expectedly provide, on the one
hand, and with the corresponding value-added for
users, on the other (Figure 1). The bottom layers
concern mainly enabling technologies (mono or bi-
directional communication-enabled sensors, meters,
actuators, etc.), while the middle layers are mainly in-
frastructural / middleware layers (aimed at providing
coordination and geographical information services);
the top layers, instead, are not necessarily to be taken
in the sequence, for they focus on specific aspects like
intelligence, social aspects, and gamification (the lat-
ter seen as a key success factor to promote technol-
ogy acceptance in the mass market). The resulting
conceptual map can be used both to locate a given
system based on its feature – for instance, most of to-
day’s remote-controllable appliances, accessible via
Android or iOS apps, are clearly located at level 2,
while the Home Manager prototype above can be eas-
ily located at level 3, with minor aspects from level 5
– and, conversely, to identify the unexplored market
niches – that is, possibly-interesting systems that are
not currently available, suggesting their development.
This approach suggests new, intriguing scenarios.
While a complete discussion is outside the scope of
this paper, what is relevant here is that a smart home
could interact with its inhabitants not only to monitor
(level 1) and remote-control (level 2) the home appli-
ances, but - provided that a suitable coordination in-
frastructure is available (level 3) - also to take into ac-
count the users’ habits, behavior, location, and prefer-
ences (level 4) to reason on the overall situation (level
5) so as to possibly anticipate the user’s needs. In
principle, the social networks (level 6) and the gam-
ification perspective (level 7) could also be exploited
as a further source of information; however, these as-
pects are also outside the scope of this paper and will
not be further considered in the following.
The resulting architecture, where the envisioned
system is represented as an intelligent “home direc-
tor” – the butler –, is shown in Figure 2(a): at this
stage, the architecture is still technology-neutral—no
specific coordination technology is selected, nor is the
architecture necessarily agent-based. However, if an
agent-based approach is adopted and the TuCSoN co-
ordination technology is selected, the architecture can
be refined as in Figure 2(b), where the TuCSoN coor-
dination artifacts (tuple centres, TCs, and agent coor-
dination contexts, ACCs) are explicitly highlighted.
This process is described in full in (Denti, 2014):
here, we just provide the essential details in Section 5
after summarising the basics of the TuCSoN model
and infrastructure.
4 TuCSoN IN A NUTSHELL
TuCSoN (Tuple Centres Spread over the Network)
(TuCSoN, 2008) is a coordination model and in-
frastructure based on a programmable coordination
medium, the tuple centre, which is a tuple space en-
hanced with the notion of behaviour specification.
Since the specification language, ReSpecT (Casadei
and Omicini, 2009; Casadei and Omicini, 2010), is
Turing-equivalent and both time-situated and space-
situated, so as to perceive the environment as needed,
any coordination-related computation can potentially
be expressed, including those that need to perceive/act
on the surrounding environment. As a result, the co-
ordination tasks can be charged on top of the coordi-
nation media, where they conceptually belong, rather
than onto the agents’ shoulders. Agents coordinate
by accessing and consuming tuples – ordered sets of
data chunks – to/from the tuple centres, by means of
the three basic read, in and out primitives.
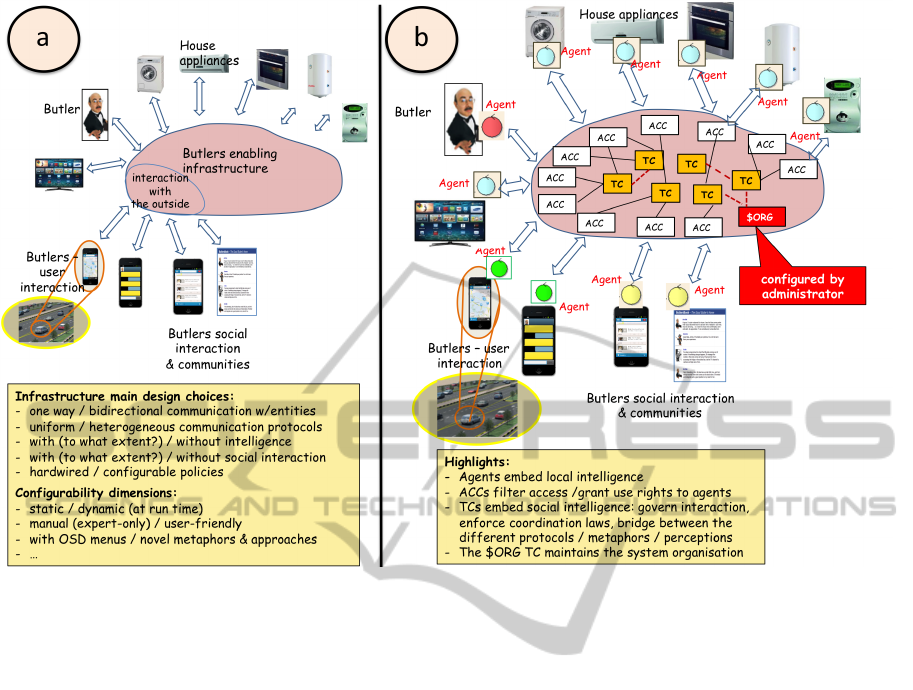
Figure 2: The Butlers architecture in general (a) and in the TuCSoN-based concretisation (b).
The Agent Coordination Context (ACC) is the ba-
sic abstraction for modeling the space of interaction
and agents communication, as well as the perception
of the environment in which it is located. Roughly
speaking, it can be seen as the conceptual boundary
between the agent and the infrastructure: its aim is
to bind and govern the interaction between the agent
and the infrastructure, based on a customisable set of
rules that define what the agent is allowed/denied to
do. Any agent entering a TuCSoN-governed system
must first ask for (negotiate) a suitable ACC, which is
released with the rules granting the agent the appro-
priate access rights; in their turn, the ACC configura-
tion is controlled by higher-level policies, set by the
system administrator in the configuration phase.
So, properly-configured ACCs and tuple centres
together can be exploited also to design and enforce
the security aspects required in a distributed system,
encapsulating authorisation and access control poli-
cies with the desired granularity.
5 BUTLER-ISING THE SYSTEM
Our goal is to extend Home Manager towards the
Butlers layer 4 and 5, exploiting the user’s loca-
tion – tracked in real time thanks to the GPS and
the other geo-localisation techniques embedded in
modern smartphones – to enable an intelligent rea-
soner agent to take some autonomous decisions (for
instance, adjusting the air conditioner temperature),
possibly even anticipating some user’s needs, man-
aging the related devices on the user’s behalf (for
instance, deducing the opportunity to switch on the
oven, or post-pone the washing machine, etc.).
More precisely, we mean i) to add the support for
mobility, enabling users to operate on the home ap-
pliances remotely via a suitable Android application;
ii) to geo-localise the user in real time, reifying this
information into the Home Manager system as a suit-
able tuple; iii) to exploit this information to detect rel-
evant user patterns – for instance, whether he/she is
buying a take-away pizza when coming home – and
consequently anticipate his/her needs proactively – in
this case, to switch on the oven at 150
◦
C so as to
warm the pizza (possibly rescheduling other energy-
consuming tasks if necessary).
Figure 3 highlights the architectural changes. On
the left side (a), the TuCSoN-based architecture of
the general Butlers system depicted in Figure 2 (b)
is downsized to the limited set of features supported
by the original Home Manager prototype (Section 2).
With respect to the full system, the selected sub-
system considers only lighting, air-conditioning and
heating, has no intelligent Butler recognisable as
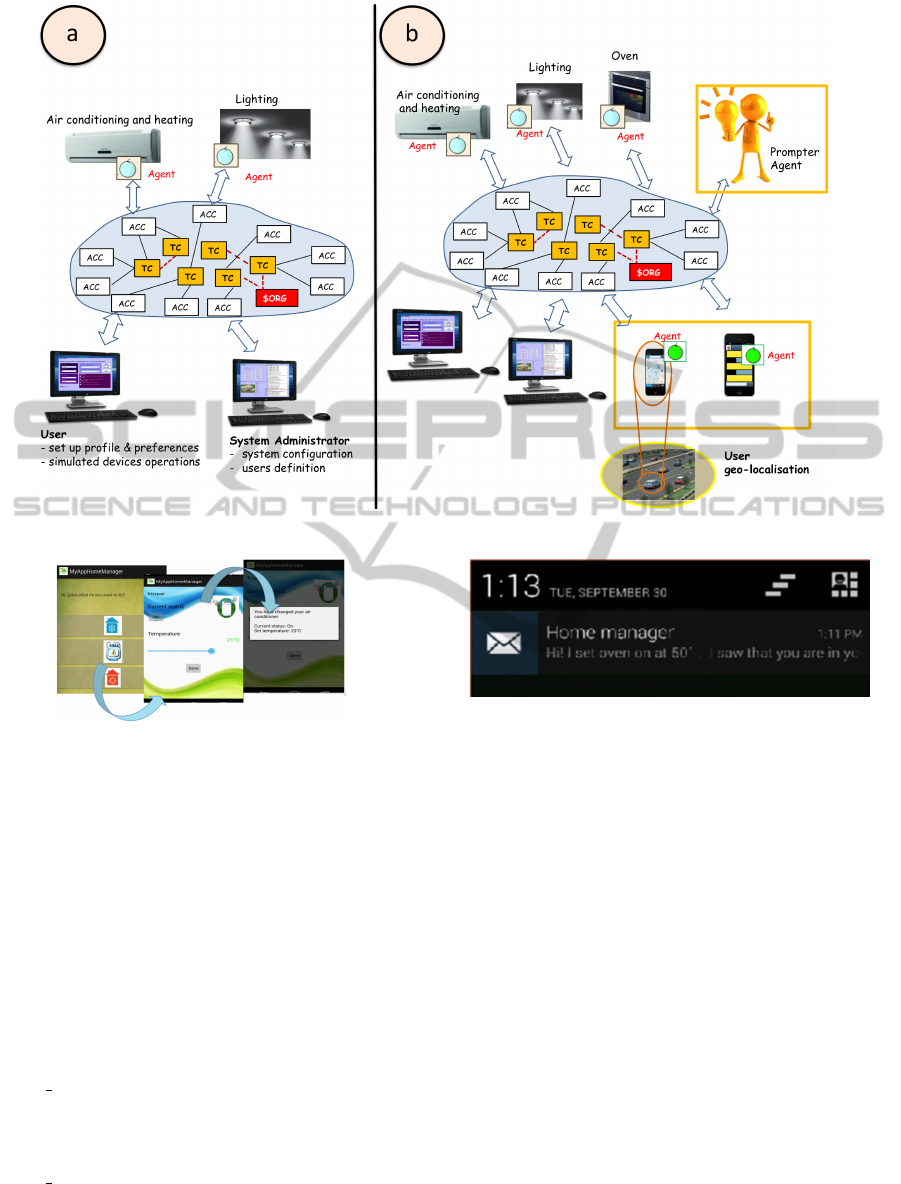
Figure 3: Home Manager architecture: current (a) vs Butlers-oriented (b).
Figure 4: Home Manager Remote Control Screen.
such, user localisation is limited to the interior of
the house and is simulated via GUI, and no so-
cial/gamification aspects are supported. Instead, the
new “butler-ised” prototype (b) aims to introduce
an Android app to achieve the goals (i) and (ii)
above, and a “prompter” (reasoner) agent, in charge
of providing suggestions for autonomous actions (is-
sue (iii)).
As for issue (i), the app allows the user, after au-
thentication, to remote-control the home appliances:
Figure 4 shows the case of the air conditioner.
As for issue (ii), the user position is reified as a
tuple of the form:
geo position(user, lat, lon)
Such tuples are stored in a specific tuple centre, which
is programmed to generate a time-stamped version of
the same tuple, like the following:
geo position(user, lat, lon, time)
used to record the user position history.
This information is then exploited, together with
any other relevant information available in the user
Figure 5: Notification of the prompter agent activity.
preferences, profile, etc., by the prompter agent to for-
mulate its suggestions (issue (iii)): the consequent ac-
tions are autonomously performed, notifying the user
via a text message on his/her phone (Figure 5). Of
course, the user can change/cancel the action if, for
any reason, he/she does not like it.
6 DISCUSSION
With respect to the original Home Manager described
in (Molesini et al., 2009), the “Butler-ised” version
overcomes the pc-based simulated control, in favor
of an actual mobile support: users can interact with
the system dynamically, in mobility, and are free to
change their mind and programs any time and any-
where. On the other hand, the smart home is still sim-
ulated, and no real device is actually connected.
The value-added of this prototype, therefore, lies
mainly in its step towards the Butlers vision: by
adding the ability to reason over the user position, it
shows – albeit in a very simplified, preliminary form

– the potential applications and the innovative perva-
sive scenarios envisioned in (Denti, 2014).
Clearly, the current implementation is just a proof
of concept: a lot of work remains to be done to ac-
tually support the Butlers upper layers, both on the
Home Manager system itself, and on the interface
with actual (non-simulated) appliances. For instance,
just to mention some aspects, the user authentica-
tion is currently un-ciphered, the reasoning of the
prompter agent is barely trivial, no user profile infor-
mation is actually exploited to customise the sugges-
tions, etc.—not to mention the social and gamifica-
tion aspects, which are totally missing at this stage.
At the same time, the choice of the TuCSoN infras-
tructure as the underlying mechanism confirms to be
a winning point: its ability to bridge between the dif-
ferent agent perceptions, particularly in the handling
of the geo position tuples, turned out to be essential
to add the new features smoothly, and with virtually
no impact on the existing system.
Widening the view, the aspect of situatedness, in-
tended as the strict coupling with the environment,
is emphasised as more and more crucial in today’s
complex computational systems (Weyns et al., 2007;
Omicini and Mariani, 2013).
Accordingly, one further dimension, definitely
worth exploring, is the specific support introduced
in the latest TuCSoN edition (Mariani and Omicini,
2014), which explicitly considers environment probes
and transducers as native metaphors. Moving from
the basic consideration that the user’s daily activi-
ties are unpredictable, but mostly depend on the en-
vironment being in some proper “enabler state” (and,
conversely, impact on / are affected by the environ-
ment), the Home Manager/Butlers scenario could be
matched on the TuCSoN meta-model by looking at en-
vironment changes as generated by probes and medi-
ated by transducers, thus enabling a uniform represen-
tation of environmental properties despite the appli-
ances’ heterogeneity. Physically, agents would then
be deployed to personal devices (like smartphones or
desktop PCs, depending on their role and function),
as in our new prototype, and probes to home appli-
ances (as assumed by the Butlers’ architecture), while
ACCs, tuple centres and transducers could be put ei-
ther on the user smartphone or remotely (the desktop
PC), based on design considerations.
7 RELATED WORK
Given the broad scope of this paper, the relevant liter-
ature spreads onto several different research areas—
from smart homes, domotic and home automation to
energy monitoring and saving, ambient intelligence,
assisted living and healthcare, and of course multi-
agent systems, coordination models and infrastruc-
tures.
Due to space restrictions, the references that have
already be discussed above will not be reported again.
Domotic and home automation systems have al-
ways aimed at automating the user interactions with
home appliances, in several ways (Ch
´
e et al., 2010;
Menon et al., 2013). Assisted living applications also
aim to support the user, though from another per-
spective and context: in (Coronato and Pietro, 2010),
for instance, a pervasive application is presented that
aims to assist people everywhere and at any time.
In the smart home context, all the major players
are introducing smarter appliances, architecture and
applications. For instance Google in 2014 proposed
‘The Works With Nest’ approach, whose ecosys-
tem aims to integrate heterogeneous apps and ser-
vices from different vendors in an unique framework
(Google, 2014), while Apple defined the Home Kit
software platform aiming to integrate third party com-
ponents and tasks with voice recognition capabilities
for their activation (Apple, 2014). More generally
speaking, appliance monitoring ranges from energy
meters such as (Innova, 2012; World, 2013) to high-
end air conditioners, fridges, etc. which today are
often provided with Android or iOS apps for remote
monitoring and control purposes.
In the multi-agent systems area, literature mainly
concerns on energy-management (mostly about en-
ergy balancing and control, from the viewpoint of
the energy provider than of the final consumer): very
little exists on MAS applied to the management of
home-related aspects. In (Tolbert et al., 2001), a
scalable MAS controls the energy resources for re-
liability and efficiency purposes in power generation
and consumption, while in (Nagata et al., 2000) the
MAS handles the power restoration after faults. In
(Zhang et al., 2011) the MAS combines local intelli-
gence with coordination issues for load management
in power grid systems, integrating the advantages of
centralized and decentralized architectures. (Conte
and Scaradozzi, 2007) is perhaps the most interest-
ing example of a MAS used for home automation:
the aim is to schedule the operation of different appli-
ances according to the user defined priorities, keeping
the global electric load below a given power thresh-
old, to prevent a shut-down.

8 CONCLUSIONS
In this paper we presented the new Home Manager
system, extended in the Butlers perspective.
Despite its many limitations and strong simplifica-
tions, due to its proof-of-concept nature, the “Butler-
ised” prototype makes one first, yet fundamental, step
towards the Butlers upper layers: by reifying the user
position via geo-localisation and adding the ability
to reason over such information, enabling the antic-
ipation of the user’s needs, it highlights the poten-
tial of the innovative pervasive scenarios envisioned
in (Denti, 2014), and shows their feasibility in princi-
ple.
For this reason, this result is more a starting point
than the end of the story: as discussed above, a lot
of work remains to be done, and many extensions, in
several different directions, are worth considering.
For instance, if the above-cited frameworks by the
major players become eventually popular, an integra-
tion with our approach could be studied, although
their goals refer mainly to the Butlers lower layers (2,
3 and possibly 4) while we mean to incrementally en-
able advanced features from the Butlers upper layers.
At the same time, serious difficulties have to be
expected when moving on, especially towards the up-
per Butlers layers: apart from technical difficulties
in enabling the interaction among so many heteroge-
neous entities, the effectiveness and the actual scala-
bility of the approach are still to be proved, and so are
the robustness and reliability of the TuCSoN infras-
tructure in such a challenging scenario. Proper knowl-
edge representation is also likely to be a critical issue
when the application scenario goes beyond the toy ex-
ample presented in this paper. Moreover, in the per-
spective, proper design metaphors and user metaphors
will be needed to deal with the complexity of layers 6
and 7, with their challenging goals of supporting ex-
perience sharing, advanced user involvement, etc.
So, our approach will be to proceed stepwise: the
first planned step is to go beyond the single, pre-
defined take-away pizzeria considered in this exam-
ple, adding the notion of user’s favorites and possibly
importing them from existing social networks (Face-
book, Google+, and others), thus adding some (min-
imal) layer 6 feature. The next step will be to inte-
grate the system with Google Maps (at least partially),
so as to grab the user’s check-in location (take-away
pizzeria, restaurant, chemist’s, etc) from that source,
removing the current requirement that it is known a-
priori. Apart from the better usability, this step would
strongly enhance the prompter agent role, while con-
stituting a major testbed both for the Butlers architec-
ture and the Home Manager system design.
ACKNOWLEDGEMENTS
Authors would like to thank Dipl. Eng. Ilaria Berto-
letti for her contribution to this project and her work
to the new prototype and the Android app, and Dr.
Eng. Leo Di Carlo for his work to the extension of
basic the prototype.
REFERENCES
Apple(2014). Home kit https://developer.apple.com/homekit/
Ayala, I., Amor, M., and Fuentes, L. (2013). Self-
configuring agents for ambient assisted living ap-
plications. Personal and Ubiquitous Computing,
17(6):1159–1169.
Bartolini, S., Milosevic, B., D’Elia, A., Farella, E., Benini,
L., and Cinotti, T. (2012). Reconfigurable natural in-
teraction in smart environments: approach and proto-
type implementation. Personal and Ubiquitous Com-
puting, 16(7):943–956.
Busi, N., Ciancarini, P., Gorrieri, R., and Zavattaro, G.
(2001). Coordination models: a guided tour. Spinger.
Casadei, M. and Omicini, A. (2009). Situated tuple centres
in ReSpecT. In Shin, S. Y., Ossowski, S., Menezes,
R., and Viroli, M., editors, 24th Annual ACM Sympo-
sium on Applied Computing (SAC 2009), volume III,
pages 1361–1368, Honolulu, Hawai’i, USA. ACM.
Casadei, M. and Omicini, A. (2010). Programming agent-
environment interaction for mas situatedness in re-
spect. The Knowledge Engineering Review. Regular
Submission.
Ch
´
e, N., Pardons, N., Vanrompay, Y., Preuveneers, D., and
Berbers, Y. (2010). An intelligent domotics system to
automate user actions. In Ambient Intelligence and
Future Trends-International Symposium on Ambient
Intelligence (ISAmI 2010), volume 72 of Advances
in Intelligent and Soft Computing, pages 201–204.
Springer Berlin Heidelberg.
Chong, N.-Y. and Mastrogiovanni, F. (2011). Ambient In-
telligence and Smart Environments: Trends and Per-
spectives. IGI Global.
Conte, G. and Scaradozzi, D. (2007). Applying mas theory
to complex home automation systems. Modeling and
Control of Complex Systems.
Coronato, A. and Pietro, G. D. (2010). Pervasive and Smart
Technologies for Healthcare: Ubiquitous Methodolo-
gies and Tools. IGI Global.
Denti, E. (2014). Novel pervasive scenarios for home
management: the butlers architecture. SpringerPlus,
3(52):1–30.
Ducatel, K., Bogdanowicz, M., Scapolo, F. Leijten, J., and
Burgelman, J.-C. (2001). Scenarios for ambient intel-
ligence in 2010. final, IPTS – European Commission’s
Joint Research Centre.
Gamification Community (2013). The gamification com-
munity portal. http://www.gamification.org.
Google (2014). Works with nest.
http://techcrunch.com/2014 /06/23/google-makes-its-
nest-at-the-center-of-the-smart-home/.

Innova (2012). Regolazione automatica e telegestione, do-
motica. http://www.innova-srl.eu.
Mariani, S. and Omicini, A. (2014). TuCSoN coordina-
tion for MAS situatedness: Towards a methodology.
In Santoro, C. and Bergenti, F., editors, WOA 2014 –
XV Workshop Nazionale “Dagli Oggetti agli Agenti”,
volume 1260 of CEUR Workshop Proceedings, pages
62–71. Sun SITE Central Europe, RWTH Aachen
University.
Menon, V., Jayaraman, B., and Govindaraju, V. (2013).
Enhancing biometric recognition with spatio-temporal
reasoning in smart environments. Personal and Ubiq-
uitous Computing, 17(5):987–998.
Molesini, A., Denti, E., and Omicini, A. (2009). An agent-
based application for home intelligence. In Filipe, J.,
Fred, A., and Sharp, B., editors, International Con-
ference on Agents and Artificial Intelligence (ICAART
2009), pages 377–384, Porto, Portugal. INSTICC.
Nagata, T., Watanabe, H., Ohno, M., and Sasaki, H. (2000).
A multi-agent approach to power system restoration.
Power System Technology.
Omicini, A. and Mariani, S. (2013). Coordination for
situated MAS: Towards an event-driven architecture.
In Moldt, D. and R
¨
olke, H., editors, International
Workshop on Petri Nets and Software Engineering
(PNSE’13), volume 989 of CEUR Workshop Proceed-
ings, pages 17–22. Sun SITE Central Europe, RWTH
Aachen University.
Omicini, A. and Papadopoulos, G. A. (2001). Editorial:
Why coordination models and languages in AI? Ap-
plied Artificial Intelligence: An International Journal,
15(1):1–10. Special Issue: Coordination Models and
Languages in AI.
Omicini, A. and Rimassa, G. (2004). Towards seamless
agent middleware. In IEEE 13th Inter. Workshops on
Enabling Technologies: Infrastructure for Collabo-
rative Enterprises (WET ICE 2004), pages 417–422.
IEEE CS.
Omicini, A. and Zambonelli, F. (1999). Coordination for
Internet application development. Autonomous Agents
and Multi-Agent Systems, 2(3):251–269.
Papadopoulos, G. A. and Arbab, F. (1998). Coordina-
tion models and languages. Advances in Computers,
46:330–401.
Ricci, A., Omicini, A., and Denti, E. (2002). Virtual en-
terprises and workflow management as agent coordi-
nation issues. International Journal of Cooperative
Information Systems, 11(3/4):355–379.
SODA (2008). Home page. http://soda.apice.unibo.it/.
Tolbert, L., Qi, H., and Peng, F. (2001). Scalable multi-
agent system for real-time electric power manage-
ment. IEEE Xplore Digital Library.
TuCSoN (2008). Home page. http://tucson.apice.unibo.it/.
Weyns, D., Omicini, A., and Odell, J. J. (2007). Environ-
ment as a first-class abstraction in multi-agent sys-
tems. Autonomous Agents and Multi-Agent Systems,
14(1):5–30. Special Issue on Environments for Multi-
agent Systems.
World, A. (2013). Artie world. http://www.artie-world.com.
Zhang, M., Ye, D., Bai, Q., Sutanto, D., and Muttaqi, K.
(2011). A hybrid multi-agent framework for load
management in power grid systems. In Bai, Q. and
Fukuta, N., editors, Advances in Practical Multi-
Agent Systems, volume 325 of Studies in Computa-
tional Intelligence, pages 129–143. Springer Berlin
Heidelberg.
