
Implicit Shape Models for 3D Shape Classification with a Continuous
Voting Space
Viktor Seib, Norman Link and Dietrich Paulus
Active Vision Group (AGAS), University of Koblenz-Landau, Universit
¨
atsstr. 1, 56070 Koblenz, Germany
Keywords:
Implicit Shape Models, 3D Shape Classification, Object Recognition, Hough-Transform.
Abstract:
Recently, different adaptations of Implicit Shape Models (ISM) for 3D shape classification have been pre-
sented. In this paper we propose a new method with a continuous voting space and keypoint extraction by
uniform sampling. We evaluate different sets of typical parameters involved in the ISM algorithm and com-
pare the proposed algorithm on a large public dataset with state of the art approaches.
1 INTRODUCTION
With the advent of low-cost consumer RGBD-
cameras 3D data of every day’s objects is available
for and can be generated by anyone. However, the
task of recognizing 3D objects is still an open area
of research. Of particular interest is the ability of
3D recognition algorithms to generalize from train-
ing data to enable classification of unseen instances of
learned shape classes. For instance, objects belonging
to the class “chair” might exhibit great shape varia-
tions while the general characteristics (sitting plane
and backrest) are present throughout a majority of
class instances. When designing algorithms for 3D
object recognition a balance between implicit shape
description for high intra-class variations and explicit
shape representation to distinguish different classes
needs to be found.
Recently, extensions of the Implicit Shape Model
(ISM) approach to 3D data have become popular. As
the name suggests, an object is not described by a di-
rect representation of its shape. Rather, an implicit
representation is built which enables the algorithm to
cope with shape variations and noise. The original
ISM approach for object detection in 2D by Leibe et
al. (Leibe and Schiele, 2003; Leibe et al., 2004) pro-
posed to represent the local neighborhood by image
patches. Assuming a fixed camera position and no ro-
tations, a window of fixed size is superimposed on the
detected keypoint position to represent the surround-
ing area. An implicit description for an object class is
learned comprising a number of object-specific fea-
tures and their spatial relations. Object detection is
performed using a probabilistic formulation to model
the recognition process.
The contributions of this work are as follows. In
Section 2 we review recent approaches that extend
the ISM formulation to 3D. Further, in Section 3
and 4 we propose a new extension of ISM to 3D
which differs in the following aspects from recent ap-
proaches. First, we propose to use a continuous 3D
voting space and the Mean-Shift algorithm (Fukunaga
and Hostetler, 1975; Cheng, 1995) for maxima de-
tection as in the original 2D ISM approach. Second,
contrary to other approaches we show that uniformly
sampling keypoints on the input data proves more
beneficial than using a keypoint detector of salient
points. Finally, we include an additional weight into
the voting process that takes into account the similar-
ity of a detected feature and a codeword. Our method
is evaluated regarding the choice of algorithm param-
eters, robustness to noise and compared with other ap-
proaches on publicly available datasets in Section 5.
We conclude the paper and give an outlook to future
work in Section 6.
2 RELATED WORK
Leibe et al. introduced the concept of Implicit Shape
Models (ISM) in (Leibe and Schiele, 2003) and
(Leibe et al., 2004). In their approach keypoints are
extracted using the Harris corner detector (Harris and
Stephens, 1988), while image patches describe the
keypoint neighborhood. These patches are grouped
into visually similar clusters, the so called codewords,
reducing the amount of image patches by 70 %. The
33
Seib V., Link N. and Paulus D..
Implicit Shape Models for 3D Shape Classification with a Continuous Voting Space.
DOI: 10.5220/0005290700330043
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 33-43
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

set of codewords is referred to as the codebook. The
possible locations on the object are obtained by com-
puting vectors from the object center to features that
are similar to at least one of the codewords. These
activation vectors and the codebook form the ISM for
the given object class. the extracted image patches of
a test image are matched with the codebook. While
the activation vectors have initially been generated
from image patch locations in relation to the known
object center, this information is used to derive hy-
potheses for object locations. Hence, each codeword
casts a number of votes for a possible object location
into a voting space. Object locations are acquired by
analyzing the voting space for maxima using Mean-
Shift Mode Estimation (Cheng, 1995).
In analogy to image patches with a fixed window
size in 2D, a subset of the input data within a spec-
ified radius around the interest point represents the
local neighborhood in 3D. Typically, the SHOT in-
terest point descriptor (Tombari et al., 2010) is used.
However, other descriptors like the extension of the
original SURF descriptor (Bay et al., 2006) to 3D
also prove beneficial (Knopp et al., 2010b). While
the original approach did not consider rotation invari-
ance, this feature is highly desirable for 3D since ob-
jects might be encountered at different poses or views.
An early extension of ISM to 3D is described by
Knopp et al. (Knopp et al., 2010b). The input fea-
ture vectors from 3D-SURF are clustered using the k-
means algorithm. As a heuristic, the number of clus-
ters is set to 10 % of the number of input features.
Codewords are created from centers of the resulting
clusters. Scale invariance is achieved by taking into
account a relative scale value derived from the fea-
ture scale and the object scale. Before casting votes
into the voting space votes are weighted to account
for feature-specific variations. Detecting the class of
a test object requires analyzing the 5D voting space
(3D object position, scale and class) for maxima.
Knopp et al. do not address rotation in (Knopp
et al., 2010b), but discuss approaches to solving rota-
tion invariant object recognition for Hough-transform
based methods in general in (Knopp et al., 2010a).
The problem is divided into three categories, depend-
ing on the additional information available for the in-
put data. In case a local reference frame is avail-
able for each feature point voting transfers an object-
specific vote from the global into a local reference
frame during training and vice versa during detection.
If only the normal at each feature is available vote po-
sitions are confined to a circle around the feature with
the normal direction (circle voting). If neither nor-
mals nor local reference frames are available, sphere
voting confines the vote position to a position on a
sphere. Regions with high density in the voting space
are then created by voting circle and sphere intersec-
tions, respectively.
While circle and sphere voting is a suitable
method our own experiments showed several disad-
vantages. Circles and spheres need to be subsampled
in order to contribute to the voting space. To guaran-
tee equal point distributions independently from fea-
ture locations the sampling density needs to increase
with the radius. Thus, the point concentration in the
voting space will increase with the object size. How-
ever, precise maxima are difficult to extract in an over-
sampled voting space and circles and spheres close
to each other promote the creation of irrelevant side
maxima and strengthen false positives. Due to these
disadvantages we decided to compute local reference
frames for each detected feature in our approach.
Contrary to Knopp et al. (Knopp et al., 2010b),
Salti et al. claim that scale invariance does not need to
be taken care of, since 3D sensors provide metric data
(Salti et al., 2010). In their approach Salti et al. inves-
tigate which combinations of clustering and codebook
creation methods are best for 3D object recognition
with ISM. Following their results, a global codebook
with k-means clustering leads to best results. As de-
scriptor, Salti et al. suggest SHOT (Tombari et al.,
2010) because of its repeatability and a provided lo-
cal reference frame.
A more recent approach presented by Wittrowski
et al. (Wittrowski et al., 2013) uses ray voting in
Hough-space. Like in other ISM adaptations to 3D
a discrete voting space is used. However, in this ap-
proach bins are represented by spheres which form di-
rectional histograms towards the object’s center. This
voting scheme proves very efficient with an increas-
ing number of training data. While other methods
store single voting vectors in codewords, here only
histogram values needs to be incremented.
3 CREATING THE IMPLICIT 3D
SHAPE MODEL
The ISM framework consists of two parts: the train-
ing and the classification stage. In both cases some
preprocessing on the input data is necessary.
First, consistently oriented normals on the input
data have to be determined. If the input data con-
sists of a single view of the scene, normals can be ori-
ented toward the viewpoint position. However, many
datasets consist of full 3D models of objects acquired
from several different viewpoints. To compute consis-
tently oriented normals on such a set of unorganized
points we apply the method proposed by Hoppe et al.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
34
(Hoppe et al., 1992).
After normal computation, representative key-
points are detected on the data and a local refer-
ence frame is computed for each keypoint. Then, a
descriptor representing properties of the local key-
point neighborhood is computed for each keypoint
in the previously determined local reference frame.
We evaluated our approach with three different key-
point extraction methods and three different descrip-
tors. More details are presented in Section 5.
In the context of Implicit 3D Shape Models, we
define a feature f as a triple, composed of a keypoint
position p
f
, a local descriptor l
f
with dimensionality
n and a representation of the local reference frame,
given by a rotation matrix R
f
:
f = hp
f
, R
f
, l
f
i (1)
p
f
=
p
x
, p
y
, p
z
T
∈R
3
R
f
=
x y z
∈R
3×3
l
f
=
l
1
, l
2
, . . . , l
n
T
∈R
n
.
For a given class C, a feature detected on an in-
stance of C is denoted by
f
C
= hp
f
, R
f
, l
f
i. (2)
Finally, the set F represents all detected features
on a scene
F = {f
C,i
} ∀C. (3)
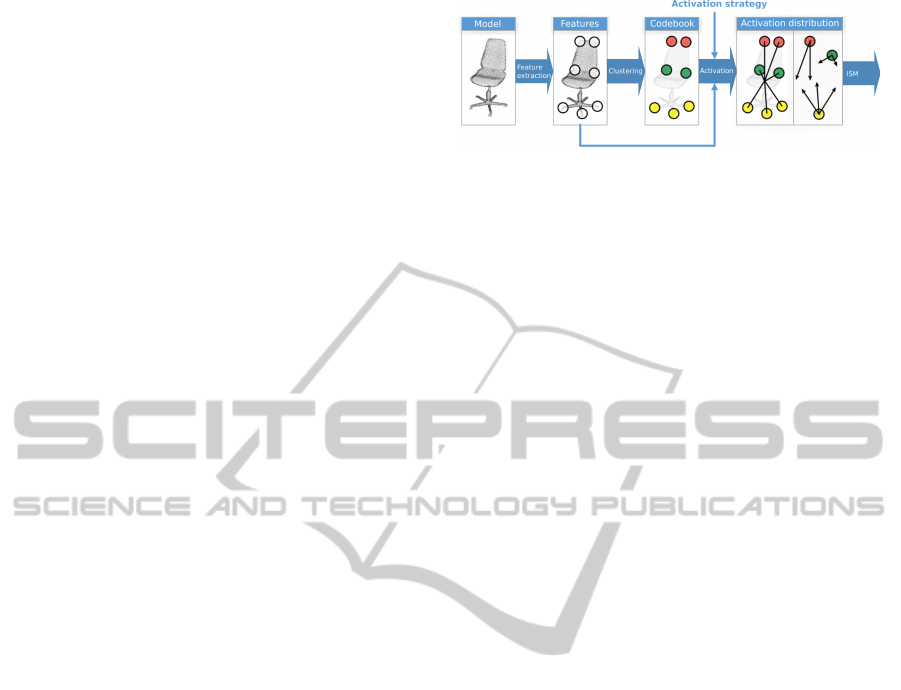
3.1 Clustering and Codebook
Generation
After computing features on the training data, a code-
book is created by clustering features according to
their corresponding descriptors into codewords. The
process of codebook creation is illustrated in Figure
1. While the original ISM used image patches to de-
scribe the local properties of an object, in our case
codewords represent the local geometrical structure.
Thus, features are clustered based on the geometrical
similarity of their corresponding object regions. The
resulting cluster centers represent prototypical local
shapes independently from their positions on the ob-
ject.
Salti et al. (Salti et al., 2010) distinguish two
types of codebooks. A local codebook treats each
object class individually: the features of the training
models for each object class are clustered to create
a class-specific codebook. During detection, a sepa-
rate codebook is used for each of the object classes.
It is likely that a codebook contains codewords that
are similar to codewords of a different codebook for a
different class. In contrast, a global codebook is com-
puted over all detected features in all classes. Features
Figure 1: Training pipeline: Features are extracted on the
initial training model and clustered by their similarity to
create codewords in a codebook. The features are then
matched with the codebook according to an activation strat-
egy to create a spatial distribution of codeword locations.
Codebook and activation distribution represent the trained
Implicit Shape Model.
from all classes contribute to the representation for a
specific object class. Thus, using a global codebook
approach allows for a wider generalization. During
detection, the codebook is shared among all object
classes. Motivated by the results provided by Salti
et al. (Salti et al., 2010), the approach presented here
uses a global codebook.
Clustering is performed with the k-means cluster-
ing algorithm. One of the main drawbacks of k-means
clustering is the choice of k, which is not trivial. Sev-
eral approaches exist to determine k automatically.
Simple solutions estimate k from the size of the data
set. Several rules of thumb such as k = m kX k as
mentioned by Knopp et al. (Knopp et al., 2010b) ex-
ist, assuming a certain percentage of the data size for
k and referring to m as the cluster factor. However, the
precise choice of k is not critical in this context, since
the exact number of partitions can not be precisely de-
termined for the high-dimensional descriptor space.
Slight variations in the clusters are not crucial to the
algorithm, as long as the cluster assignment works as
expected and the within-cluster error function is effec-
tively minimized. Using the above described heuristic
is therefore sufficient for the current approach.
After clustering, the created codebook C contains
a list of codebook entries (codewords) c
j
∈ R
n
, rep-
resented as cluster centers from feature descriptors
l
f
∈ R
n
:
C = {c
1
, c
2
, . . . , c
k
| c
j
∈ R
n
}. (4)
3.2 Codeword Activation
So far, the codebook contains a list of codewords
which are prototypical for a specific geometrical
property of the training model. However, the code-
book does not contain any spatial information, yet. In
accordance with the Implicit Shape Model formula-
tion in (Leibe and Schiele, 2003), the activation step
builds a spatial distribution specifying where each
ImplicitShapeModelsfor3DShapeClassificationwithaContinuousVotingSpace
35

Figure 2: Activation procedure during training. Detected
features activate a codeword (red) and their relative vectors
to the object center are computed. Based on the local ref-
erence frame associated with each of the features, the vec-
tors are rotated into a unified coordinate system. The list of
rotated activation vectors then builds the activation distribu-
tion for the current codeword.
feature belonging to a codeword is located on a train-
ing model. By iterating again over all detected fea-
tures, the activation step matches the features with the
generated codewords contained in the codebook ac-
cording to an activation strategy. This strategy spec-
ifies whether or not a feature activates a codeword
and is based on a distance measure between feature
and codeword. Since codewords have been created
as cluster centers from a clustering method applied
to feature descriptors, both are given in the same de-
scriptor space. Thus, the activation strategy can work
with the same distance measure as was used by the
clustering method during codebook creation. Given
a feature f
i
∈ F and the codebook C , the activation
step returns those codewords that match the feature
according to the chosen strategy. The distance be-
tween feature descriptor and codeword is determined
by the distance function d(l
f
, c) = kl
f
−ck
2
.
The simplest method of activation would activate
only the best matching codeword for the current fea-
ture. However, during codebook creation a multitude
of features has been grouped together to form one
codeword. While all features that have been grouped
together in a codeword have a low distance toward
each other, there is still variation involved in the cor-
rect cluster assignment. It is thus suitable to enable
the activation of more than one codeword, e.g. by ac-
tivating all codewords with a distance to the cluster
below a threshold. In the presented approach we use
the k-NN strategy, where the k best matching code-
words are activated.
For each activated codeword the activation then
creates a spatial distribution specifying where each
codeword is located on the object. First, the keypoint
positions have to be transferred from global coordi-
nates into an object centered coordinate frame. In
order to do this a minimum volume bounding box
(MVBB) of the object is calculated. According to
(Har-Peled, 2001), computing the MVBB is reduced
to first approximating the diameter of the point set,
i.e. finding the maximum distance between a pair of
points p
i
and p
j
. The estimated MVBB is then given
by the direction between the diameter points and the
minimum box enclosing the point set, as described
in (Barequet and Har-Peled, 2001), thus yielding an
oriented box B with size s
B
, center position p
B
and
identity rotation R
B
:
B = hs
B
, p
B
, R
B
i (5)
s
B
= p
i
−p
j
∈R
3
p
B
= p
i
+
s
B
2
∈R
3
R
B
= I
3×3
∈R
3×3
.
The bounding box is stored with the training data
and used at detection for further analysis. The con-
tained rotation matrix can be used at detection to de-
termine the relative rotation of an object between two
scene views. The object’s reference position is now
given by p
B
as the center position of the minimum
volume bounding box. The relative feature position is
then given in relation to the object position p
B
by
v
f
rel
= p
B
−p
f
(6)
and represents the vector pointing from the location of
the feature on the object to the object center position.
To allow for rotation invariance, each feature was as-
sociated with a unique and repeatable reference frame
given by a rotation matrix R
f
. Transforming the vec-
tor v
f
rel
from the global into the local reference frame
can then be achieved by
v
f
= R
f
·v
f
rel
. (7)
We obtain v
f
, the translation vector from the fea-
ture location to the object center in relation to the
feature-specific local reference frame, as described by
(Knopp et al., 2010a). Thus, v
f
provides a position
and rotation independent representation for the occur-
rence of feature f (Figure 2). The final activation dis-
tribution for a codeword c is then given by
V
c
= {v
f
i
| ∀f
i
∈ F
c
} (8)
where F
c
is a set containing all features that activated
the codeword c. The set V
c
contains a list of activa-
tion vectors for codeword c pointing from the feature
location on the object to the object’s center.
In combination with the codebook C , the final ac-
tivation distribution maps each codeword c ∈ C to its
list of activation vectors V
c
and builds the final data
pool for the detection process with the activation dis-
tribution for all codewords V . Along with the activa-
tion vectors, each entry in the activation distribution
also stores additional information like the class C of
the feature that activated the corresponding codeword
and the computed bounding box B.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
36
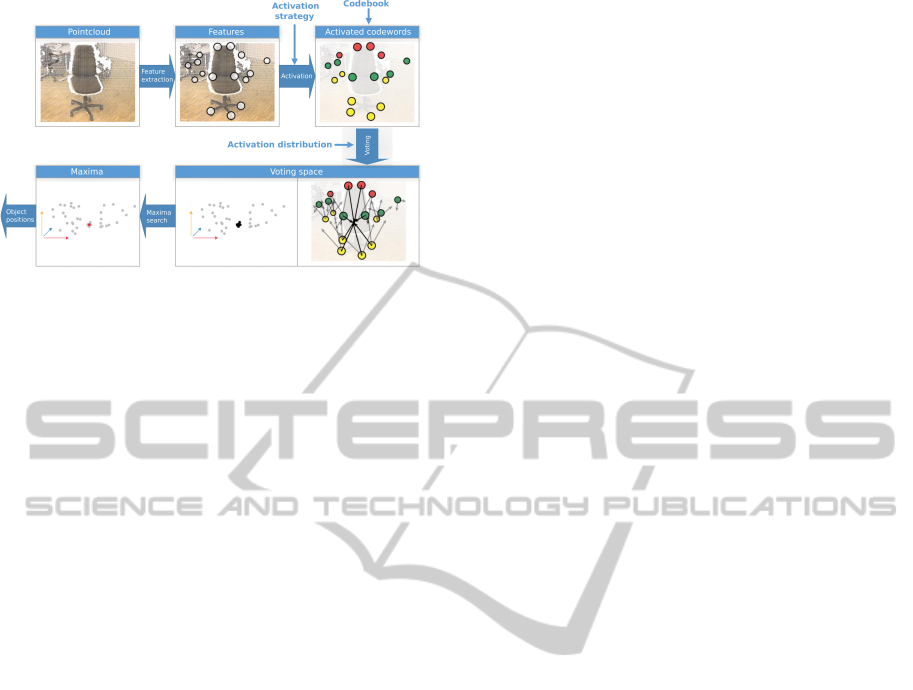
Figure 3: Classification pipeline: Features are extracted on
the input point cloud. Detected features are matched with
the codebook and matching codewords cast their activation
vectors into a voting space. When an object is found, acti-
vation vectors build clusters in the voting space, which are
detected by searching for maximum density regions.
4 3D OBJECT CLASSIFICATION
The training process created an implicit object rep-
resentation, consisting of a codebook of local geo-
metrical codewords C and an activation distribution,
reflecting the positions where each codeword is ex-
pected to be located on the object. To classify objects,
features are detected on the input point cloud in the
same manner as in the training stage. Matching de-
tected features with the previously trained codebook
yields a list of activated codewords that cast their ac-
tivation vectors into a continuous voting space. When
an object matches one of the representations stored
within the ISM, several activation vectors will cre-
ate clusters at nearby locations. These voting clus-
ters represent hypothetical bounding box centers of
yet unknown object instances. By searching for these
maximum density regions, all object hypotheses are
collected and evaluated using a weighting strategy.
Figure 3 presents an overview of the classification
pipeline.
4.1 Codeword Activation
Although technically possible to do otherwise, key-
points are detected here using the same keypoint de-
tection algorithm as was used in training. However,
using the same descriptor is inevitable, since descrip-
tors originating from different methods are formu-
lated in a different descriptor space accounting for
different geometrical properties and thus are not com-
parable by design.
After detecting features, the same activation strat-
egy is employed as was used in training. By match-
ing features with codewords, the activation yields a
number of codewords and their corresponding activa-
tion vectors. Thus, correspondences are established
at locations where the input data is assumed to match
the trained object models. Based on the stored ac-
tivation distribution all activation vectors are subse-
quently collected for each of the activated codewords.
4.2 Weighted Voting
The activation distribution was created to reflect all
observed locations on the training object where the
corresponding activated codeword was found. During
voting this process is reversed to back project the ac-
tivation vectors from the activated feature locations to
indicate possible object center locations.
Each activated codeword casts its votes for pos-
sible object locations into a multi-dimensional vot-
ing space. To reduce the dimensionality of the vot-
ing space the object’s rotation is ignored in this step.
Further, a separate voting space for each class reduces
the voting space dimensionality to three, the 3D posi-
tion of the hypotheses. The number of object classes
is known from the training stage.
The voting space for a specific class is built as a
continuous three-dimensional space, in which every
point is assigned a weight. Each activation vector v ∈
V casts a vote for an object hypothesis into the voting
space at a location x, weighted by ω based on the class
C from the training process. The respective weight
corresponds to the probability that this vote reflects
the actual object location. The weight calculation is
explained in the following Section.
After voting, the voting spaces are analyzed for
maxima individually. In each voting space maxima
are selected using the Mean-Shift algorithm described
by Fukunaga and Hostetler (Fukunaga and Hostetler,
1975). Given the final object position and class, rota-
tion is estimated as described in Section 4.4.
4.3 Weighting
The probabilistic formulation is implemented using a
weighted voting space. Each vote v being cast gets
therefore an additional weight ω ∈ [0, 1] that models
the probability that this vote supports the correct ob-
ject hypothesis. The maxima represent a region in the
voting space with the highest probability density, i.e.
all votes around the maximum contribute with their
weights to the final probability for the object occur-
rence. The final vote weight ω for vote v is composed
of three separate individual weights.
Two of these weights, the statistical weight and
the center weight, are adapted from Knopp et al.
(Knopp et al., 2010b). The statistical weight, denoted
ImplicitShapeModelsfor3DShapeClassificationwithaContinuousVotingSpace
37

ω
st
, is used to normalize the individual votes. It guar-
antees that the probability is computed independently
from the actual number of votes. The weights are nor-
malized based on the number of activated codewords
and activation vectors. The weight ω
st
weights a vote
for a class C, created from a codeword c, by
ω
st
=
1
n
vw
(C)
·
1
n
vot
(c)
·
n
vot
(C,c)
n
f tr
(C)
∑
C
k
n
vot
(C
k
,c)
n
f tr
(C
k
)
. (9)
The first and second term normalize the vote weight
by the number of codewords n
vw
(C) that vote for the
current object class C and by the number of votes
n
vot
(c) assigned to a codeword c, respectively. The
third term normalizes on inter-class level. It repre-
sents the probability that the word c votes for the
given class in contrast to the other classes.
The center weight, denoted ω
cen
, is computed for
each vote during training. When creating the activa-
tion distribution the number of activated codewords
per feature depends on the activation strategy. Con-
sequently, not every voting vector assigned to a code-
word points exactly to the true object position. The
weight ω
cen
thus computes the distances from each
entry in the activation distribution v
f
to the actual ob-
ject center p
B
:
ω
cen
= median
exp
−
d(v
f
, p
B
)
σ
2
cen
. (10)
In case a codeword contains a number of votes for a
training model, only those votes that actually fall into
the surrounding of the known object center position
are assigned a high weight. Experiments showed that
σ
2
cen
= 0.25 is a reasonable value.
As an additional weight, we use the matching
weight, ω
mat
. It represents the matching score be-
tween a feature and the activated codeword. A low
distance represents a higher probability that the fea-
ture matches the current codeword regarding its geo-
metrical properties. Given the feature f with descrip-
tor l
f
and the corresponding matched codeword c, the
matching weight is given by
ω
mat
= exp
−
dist(l
f
, c)
2
2σ
2
mat
. (11)
Since the distance between feature and codeword is
given in descriptor space, the value of σ
2
mat
depends
on the chosen descriptor type and indicates how much
a codeword can differ from a feature. The value σ
2
mat
is determined during training by the sample covari-
ance. Given F
C
, the features on a training model for a
class C, the sample mean of distances is computed by
µ =
1
MN
M
∑
i=1
N
∑
j=1
dist(l
f
i
, c
j
) (12)
over all features f ∈ F
C
and activated codewords c
j
,
where M = kF
C
k is the number of found features for
a class C and N are all activated codewords. The final
value of σ
2
mat
is computed as the sample covariance
σ
2
mat
=
1
MN −1
M
∑
i=1
N
∑
j=1
(dist(l
f
i
, c
j
) −µ)
2
. (13)
This value is stored during training and computed in-
dividually for each class. For classification the match-
ing weight is evaluated for each vote and σ
2
mat
is cho-
sen based on the class. The final weight assigned to
each vote is a combination of the individual weights:
ω
i
= ω
st
i
·ω
cen
i
·ω
mat
i
. (14)
4.4 Rotation Invariance
The activation vector v
f
rel
of feature f has been rotated
into the local reference frame given by the rotation
matrix R
f
during training as shown in Eq. (7). During
classification the rotation is reversed by the inverse
rotation matrix R
f −1
= R
f T
computed from f on the
scene, resulting in the back rotated activation vector
ˆv
f
rel
= R
f T
·v
f
. (15)
The activation vector v
f
has been created during train-
ing pointing from the feature position to the object
center. The back rotated activation vector for each
feature is used to create an object hypothesis at posi-
tion x relative to the position p
f
of the detected feature
x = p
f
+ ˆv
f
rel
. (16)
Since the activation vector was created in relation to
the center of the bounding box, the object hypothesis
is also the center position of the yet unknown object
and its bounding box (Figure 4). Applying rotation
during training and back rotation during classification
the final object vote is considered rotation invariant
under the assumption that the computation of the local
reference frame itself is rotation invariant.
4.5 Maxima Search in Voting Space
The approach to detect maximum density regions
within the voting space has been adapted from Hough
and Arbor (Hough and Arbor, 1962) where it was
used to detect straight lines in images. Ballard
(Ballard, 1981) generalized this method to detect
arbitrary shapes. The voting space is a Cartesian
space in which the object’s center is located. It
is subdivided into discrete bins of a certain size.
When an object hypotheses falls into a certain bin
the value of this bin is incremented by the vote’s
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
38

v
3
v
2
v
4
C
2
v
5
v
6
v
7
Figure 4: Activation procedure during detection. Code-
words (red and green) are associated with list of activation
vectors during training. Each vector has been rotated into
the local reference frame of the activating training feature.
Each detected feature in an unknown scene is associated
with its own local reference frame. Features that match the
codebook according to the activation procedure then cast
the corresponding back rotated votes into the voting space,
creating clusters when objects are found.
weight. Maxima in the voting space are detected by
applying non-maximum suppression and choosing
the remaining maximum bins by their accumulator
value. Bins with high accumulator values correspond
to object locations with a high probability, while low
accumulator values can be discarded as irrelevant.
Although easy to implement this discrete voting
space approach has several disadvantages. The
extent of the accumulator bins highly influences the
precision of the detected object locations. Votes
of different objects might fall into the same bin or
likewise, votes for one object might be scattered
across several bins. Maxima search might then
dismiss the corresponding object if the individual
accumulator values are too small. We therefore use a
continuous voting space without discrete bins.
The voting space created from activation can
be seen as a sparse representation of a probability
density function. While each vote that has been cast
into the voting space represents a probability that
the object is located at the vote position, finding the
actual object location from the multitude of votes in
the voting space is reduced to finding those locations
in the probability distribution that have the highest
probability density. In this context, maxima in the
probability density functions are detected using the
Mean-Shift algorithm described by Fukunaga and
Hostetler (Fukunaga and Hostetler, 1975).
Given a point x ∈ R
3
, the Mean-shift vector
applies the kernel profile g to the point differences
between all neighboring points x
i
within the kernel
bandwidth h. Since we search for maxima in the
voting space, the data points are the individual votes.
We use a modified Mean-Shift vector as proposed
by Cheng (Cheng, 1995) to account for weighted
votes. Here, the kernel density gradient estimation is
applied over a weighted point set in which each data
point x is assigned a weight ω ∈ R. The resulting
Mean-Shift vector
Figure 5: Detection process and bounding box extraction.
Left: Computed features and their corresponding local ref-
erence frames. Right: Activated features cast votes into the
voting space. The Mean-Shift Mode Estimation extracted
the predicted object location and the bounding box has been
averaged from the contributing votes.
m
h,g
(x) =
∑
i
x
i
ω
i
g
x−x
i
h
2
∑
i
ω
i
g
x−x
i
h
2
−x (17)
at position x points in the direction of the maximum
density region for the chosen bandwidth. Maxima are
obtained by iteratively following the direction of m
h,g
.
To create seed points for the Mean-Shift algorithm a
regular grid is superimposed on the data. Each cell
containing at least a minimum number of data points
creates a seed point. Here, the grid size was chosen
as
2h
√
2
since the corresponding cell is then perfectly
covered by the kernel.
It is likely that several seed points converge to the
same position. In order to retrieve individual maxima,
a following pruning step performs a non-maximum
suppression and eliminates duplicate maxima. Addi-
tionally, the final probability for the detected maxi-
mum at x
max
is given by the kernel density estimation
at the maximum position in the voting space.
4.6 Bounding Box Extraction
During training the bounding box information has
been stored as additional information for each com-
puted vote. Since a vote is generated by matching a
feature to a codeword, the corresponding feature is
associated with a local reference frame.
During classification, all detected features on the
unclassified point cloud that activate a codeword cast
a number of votes into the voting space. When cast-
ing the votes the associated bounding boxes are trans-
ferred back into the global coordinate system using
the corresponding local reference frame for the cur-
rent feature. After maxima detection yields the most
likely object hypotheses all votes that contributed to
the hypothesis and lie around the maximum location
within the kernel bandwidth are collected (Figure 5).
This results in a list of bounding box hypotheses, each
ImplicitShapeModelsfor3DShapeClassificationwithaContinuousVotingSpace
39

of which has been weighted according to the corre-
sponding vote weight.
Estimation of the bounding box is performed by
creating an average bounding box representation on
the basis of the collected weighted votes, enforcing
the constraint
∑
ω
i
= 1. While averaging the bound-
ing box size can easily be done, computing an aver-
age weighted rotation is more complex. The rotation
matrix is converted into a quaternion representation.
Averaging quaternions is achieved by computing the
4 ×4 scatter matrix
M =
N
∑
i=1
ω
i
q
i
q
T
i
(18)
over all quaternions q
i
and their associated weights
ω
i
. After computing the eigenvalues and eigenvec-
tors of M, the eigenvector with the highest eigen-
value corresponds to the weighted average quaternion
(Markley et al., 2007).
5 EXPERIMENTS AND RESULTS
In this Section the proposed approach is analyzed
with respect to performance and precision and applied
to several datasets and test cases. Evaluation is per-
formed on two different datasets that are shortly in-
troduced.
Kinect dataset: We created a dataset from Kinect
data in our lab. For each training model, several dis-
tinct scans from different viewpoints have been cap-
tured. The different point clouds for each objects
were aligned manually to create a full 3D training
model. The aligned point clouds were merged and
the resulting point cloud was sampled with a uniform
grid to create a uniform point distribution. Finally,
the point cloud was smoothed with Moving Least
Squares (Alexa et al., 2003) in order to compensate
for noise on the object surface and filtered using a sta-
tistical outlier removal method. Three object classes
were chosen: chairs, computers, tables. Aim@Shape
Watertight dataset (SHape REtrieval Contest 2007,
2014; A Benchmark for 3D Mesh Segmentation,
Princeton University, 2014): This publicly available
dataset contains 20 object classes, each with 20 in-
stances. The first 10 objects of each class were used
for training while the remaining 10 were used for
classification. Our algorithms uses the point cloud
data type, however this dataset is available as mesh
files. For evaluation, we converted the meshes to
point clouds and scaled each model to the unit circle.
Table 1: Minimum distance between ground truth and de-
tected object hypothesis (in meters).
PFH FPFH SHOT
Harris3D 0.073 0.192 0.391
ISS 0.072 0.067 0.066
Uniform Sampling 0.075 0.056 0.062
Table 2: Distance between ground truth and most significant
object hypothesis (in meters).
PFH FPFH SHOT
Harris3D 1.289 1.585 1.597
ISS 0.882 1.189 1.174
Uniform Sampling 1.116 0.056 0.062
5.1 Selection of Keypoint Detectors and
Descriptors
Before analyzing the performance of the algorithm on
several test cases, the effects of parameter selection
are evaluated. A crucial question is how keypoints
should be selected and which descriptor should be
used. In our experiments we tested the combination
of three different descriptors, PFH (Rusu et al., 2008),
FPFH (Rusu et al., 2009) and SHOT (Tombari et al.,
2010) with three different keypoint selection methods,
Harris3D (Sipiran and Bustos, 2011), Intrinsic Shape
Signatures (ISS) (Zhong, 2009) (in our case used only
as detector) and uniform sampling.
For the given evaluation, the ISM has been trained
with one model only and the detection algorithm has
been applied to a scene containing a single instance
of the trained model. In particular, a chair model
from the Kinect dataset has been trained and detec-
tion was performed on a scene containing the same
chair in front of a wall and a partially visible shelf
and table close to the chair. Detecting the object in
this scene resulted in several hypotheses on the true
object location. Table 1 depicts the minimum distance
of a hypotheses to the ground truth object center de-
pending on different combinations of keypoint detec-
tor and descriptor. We consider an object as correctly
detected if the distance to the ground truth does not
exceed 0.1m.
While the Harris3D detector does not work well
with FPFH and SHOT, all other combinations are ac-
ceptable. However, this analysis does not allow any
conclusions to the significance of the object hypothe-
sis. The algorithm detects maxima in the voting space
and computes a probability for each detected object
hypothesis, based on the total weights of all contribut-
ing votes. The detection result is represented by a
list containing each object hypothesis sorted by the
computed probability. Therefore, Table 2 additionally
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
40
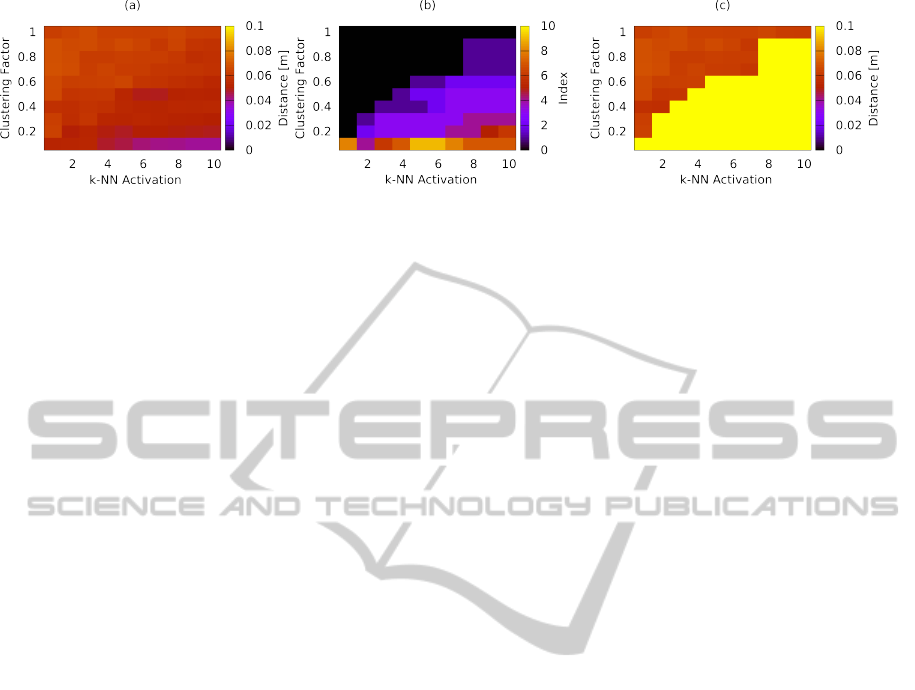
Figure 6: Detection precision plot with one trained object and a scene containing one instance of that object. (a) Minimum
distance to ground truth. (b) Corresponding index in the detection list for hypothesis with minimum distance to the ground
truth. (c) Distance to ground truth of highest weighted hypothesis.
shows the distance to the ground truth of the high-
est weighted and thus most probable object hypothe-
sis. Only the uniform sampling keypoint extraction in
combination with the FPFH or SHOT descriptor leads
to a detected object that is within the acceptable mar-
gin of 0.1 m. Further, these are not only the highest
weighted hypotheses, but also the closest ones to the
ground truth.
The sparse keypoints detected by the Harris3D
and the ISS interest point detector created codewords
with only little votes. Since the process of match-
ing codewords to keypoints suffers from sensor noise,
maxima composed of only few votes are scattered
around in the voting space. In contrast to common
keypoint detectors, uniform sampling takes its advan-
tages from the vast amount of keypoints causing max-
ima in the voting space to be composed from lots of
votes, therefore stabilizing detected maxima. In the
following experiments we use the combination of uni-
form sampling for keypoint extraction and the SHOT
descriptor. SHOT was chosen over FPFH for its run-
time performance.
5.2 Codebook Creation
One interesting aspect is the relationship between
clustering during codebook creation and the activa-
tion strategy. In order to visualize the relationship
between these parameters, training and classification
were performed multiple times with different parame-
ter instances. Training was performed using k-means
clustering and the k-NN activation strategy. For clus-
tering, the number of clusters and therefore code-
words was iteratively changed from 100 % to 10 % of
the number of extracted keypoints. At the same time,
the number of activated codewords per feature was
changed from 1 to 10. As before, the result is a list of
object hypotheses sorted by their weight.
Figure 6 (a) shows that for each combination of
k and cluster count, the minimum distance between
the ground truth and the detected object hypotheses
is always within the specified margin of 0.1 m. The
black area in Figure 6 (b) depicts the cases in which
the object with minimum distance to ground truth is
also the topmost entry in the detection list (highest
weighted object hypothesis). While the data in Figure
6 (a) suggested that the precision improved with in-
creasing k and decreasing cluster count, Figure 6 (b)
suggests that in those cases the object significance de-
creases. Figure 6 (c) depicts the ground truth distance
for the highest weighted maxima. The graph shows
that for the best detected hypothesis the distance to
the ground truth is below 0.1 m in all cases.
In each test 1 to 4 chairs were trained while detec-
tion was performed on the same scene as in Section
5.1. Since the results in all these test cases were simi-
lar, we conclude that an increasing number of training
models does not have significant effects on the mini-
mum distance to the ground truth.
We further conclude that the best detection preci-
sion is achieved when the activation strategy activates
only a small number of codewords while using a code-
book with only little or no clustering at all. These
results confirm the implications of Salti et al. (Salti
et al., 2010) that the codebook size is not expected
to have any positive influence on the detection capa-
bilities of the algorithm, but is rather legitimated by
performance considerations. The reason is that with
increasing k each feature activates the k best match-
ing codewords and therefore creates lots of (probably
less significant) votes from the corresponding code-
words. Further, with decreasing cluster count more
features are grouped together to create a codeword.
Consequently, even highly different features activate
the same codeword. For the following experiments
we consider only k-NN activation strategies with k
∈ {1, 2, 3} and clustering factors of 1, 0.9 and 0.8.
5.3 Generalization and Influence of
Noise
We evaluated the ability of our approach to classify
trained objects with different levels of Gaussian noise,
as well as the generalization capability of the ap-
proach. For this task we use scenes containing only
ImplicitShapeModelsfor3DShapeClassificationwithaContinuousVotingSpace
41

0.6
0.65
0.7
0.75
0.8
0.85
0.9
classification rate
point density (cm)
SHOT radius (cm)
20 25 30
0.25
2.00
1.50
1.00
0.50
20 25 30 20 25 30 20 25 30 20 25 30
test case (A)
test case (B)
Figure 7: Classification results for various point densities
and SHOT radii on the Aim@Shape Watertight dataset. In
test case (A) the same grid size for uniform sampling was
used during training and classification. In test case (B) the
grid size during classification was equal to half the grid size
from the training step.
the segmented object to be classified. In the pre-
sented test cases, the training objects from the Kinect
dataset have bee rotated and translated randomly and
Gaussian noise was applied with increasing values
for sigma. The ISM has been trained on all avail-
able training objects. However, two different training
cases have been chosen. In case (A) several objects
were assigned the same class. In particular, all chairs,
tables and computers have been assigned their corre-
sponding classes, resulting in 3 classes with 2 to 4
training objects per class. Contrary, in test case (B)
each object was assigned its individual class resulting
in 9 classes.
Following the experimental results from Section
5.2 test cases were performed on 9 different parameter
permutations (k-NN activation with k ∈ {1, 2, 3} and
clustering factors of 1, 0.9 and 0.8). Evaluation is per-
formed by averaging the detection results of the 9 pa-
rameter permutations for each object and noise level.
In test case (A) 97 % of highest weighted hypotheses
had correct class labels and a distance to ground truth
of less than 0.1 m. In test case (B) this was the case
for 99% of all test cases.
5.4 Shape Classification
We compared our approach with other ISM imple-
mentations for 3D object classification. Evaluation
was performed on the Aim@Shape Watertight dataset
that is available as mesh files. Since our algorithm
works with point cloud data, the meshes were con-
verted into point clouds and scaled to the unit circle.
One question that arises during conversion is at which
density the meshes should be sampled. For our exper-
iments we tested different uniformly sampled densi-
ties in combination with different radii for the SHOT
descriptor. Again, we conducted two different test
cases. In test case (A) uniform sampling for keypoint
extraction was performed with a grid size equal to the
SHOT radius during training and classification. In test
case (B) the grid size during classification was set to
half the grid size of training. Thus, much more votes
were generated during detection than during training.
The bandwidth parameter for the Mean-Shift algo-
rithm was set to the double SHOT radius in each test
run in both test cases. The results of both test cases
are presented in Figure 7.
In case (A) best results (77.5 %) were achieved
with a SHOT radius of 20 cm and a point density of
0.5 cm. In case (B) with many more keypoints sam-
pled during classification than during training the best
result of 81 % was again obtained with a point density
of 0.5 cm, while the SHOT radius was 25 cm. How-
ever, in general neither different point densities, nor
different SHOT radii led to much variation in the clas-
sification results. The classification result for most
test cases and parameter variations was between 70 %
and 75 % in test case (A) and between 75 % and 80 %
in test case (B).
A comparison to other approaches is presented in
Tab. 3. Wittrowski et al. (Wittrowski et al., 2013)
evaluated their approach on 19 of 20 classes of the
dataset. They also provide the comparison with Salti
et al. (Salti et al., 2010) on the partial dataset. For
a better comparison with these approaches we evalu-
ated our algorithm on both, the complete and the par-
tial dataset. The obtained results with our approach
are comparable with state of the art results. Our clas-
sification rates suggest that it is worthwhile to fur-
ther investigate the use of continuous voting spaces
in combination with uniformly sampled keypoints for
Implicit Shape Models for 3D shape classification.
6 CONCLUSION AND OUTLOOK
In this paper we presented a new adaptation of the Im-
plicit Shape Model (ISM) approach to 3D shape clas-
sification. Our approach is invariant to rotation and al-
lows to extract a bounding box of the classified shape.
In contrast to other approaches we use a continuous
voting space. Further, we propose to uniformly sam-
ple interest points on the input data instead of using
a keypoint detector. We experimentally prove that the
large number of votes from uniformly sampled key-
points lead to more stable maxima in the voting space.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
42

Table 3: Comparison of 3D ISM shape classification on the Aim@Shape Watertight dataset.
Salti et al. Wittrowski et al. proposed approach
(Salti et al., 2010) (Wittrowski et al., 2013) (this paper)
complete (20 classes) 79 % - 81 %
partial (19 classes) 81 % 82 % 83 %
Finally, we compare our algorithm to state of the art
3D ISM approaches and achieve competitive results
on the Aim@Shape Watertight dataset.
In our future work we will optimize the vote
weighting to strengthen true positive maxima and
weaken irrelevant side maxima. We plan to use more
different datasets for evaluation and investigate how
keypoint sampling during training and classification
and the bandwidth parameter of the Mean-Shift algo-
rithm influence the classification results. Our goal is
to find optimal parameters and an optimal weighting
strategy to apply the ISM approach for object detec-
tion in heavily cluttered scenes.
REFERENCES
A Benchmark for 3D Mesh Segmentation, Prince-
ton University (2014). Aim@shape water-
tight dataset (19 of 20 classes). Available at
http://segeval.cs.princeton.edu/.
Alexa, M., Behr, J., Cohen-Or, D., Fleishman, S., Levin,
D., and Silva, C. T. (2003). Computing and rendering
point set surfaces. IEEE Transactions on Visualization
and Computer Graphics.
Ballard, D. H. (1981). Generalizing the hough trans-
form to detect arbitrary shapes. Pattern Recognition,
13(2):111–122.
Barequet, G. and Har-Peled, S. (2001). Efficiently ap-
proximating the minimum-volume bounding box of a
point set in three dimensions. Journal of Algorithms,
38(1):91–109.
Bay, H., Tuytelaars, T., and Gool, L. J. V. (2006). Surf:
Speeded up robust features. ECCV, pages 404–417.
Cheng, Y. (1995). Mean shift, mode seeking, and clustering.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 17(8):790–799.
Fukunaga, K. and Hostetler, L. D. (1975). The estimation
of the gradient of a density function, with applications
in pattern recognition. IEEE Transactions on Infor-
mation Theory, 21(1):32–40.
Har-Peled, S. (2001). A practical approach for computing
the diameter of a point set. In Proc. of the 17th Annual
Symposium on Computational Geometry, pages 177–
186.
Harris, C. and Stephens, M. (1988). A combined corner
and edge detector. In 4th Alvey Vision Conf., pages
147–151.
Hoppe, H., DeRose, T., Duchamp, T., McDonald, J., and
Stuetzle, W. (1992). Surface reconstruction from un-
organized points. In Proc. of the 19th Annual Conf. on
Computer Graphics and Interactive Techniques, pages
71–78.
Hough, P. V. C. and Arbor, A. (1962). Method and means
for recognizing complex patterns. Technical Report
US Patent 3069 654, US Patent.
Knopp, J., Prasad, M., and Van Gool, L. (2010a). Orien-
tation invariant 3d object classification using hough
transform based methods. In Proc. of the ACM Work-
shop on 3D Object Retrieval, pages 15–20.
Knopp, J., Prasad, M., Willems, G., Timofte, R., and
Van Gool, L. (2010b). Hough transform and 3d surf
for robust three dimensional classification. In ECCV
(6), pages 589–602.
Leibe, B., Leonardis, A., and Schiele, B. (2004). Com-
bined object categorization and segmentation with an
implicit shape model. In ECCV’ 04 Workshop on Sta-
tistical Learning in Computer Vision, pages 17–32.
Leibe, B. and Schiele, B. (2003). Interleaved object catego-
rization and segmentation. In BMVC.
Markley, F. L., Cheng, Y., Crassidis, J. L., and Oshman, Y.
(2007). Quaternion averaging. Journal of Guidance
Control and Dynamics, 30(4):1193–1197.
Rusu, R. B., Blodow, N., and Beetz, M. (2009). Fast point
feature histograms (fpfh) for 3d registration. In Proc.
of the Int. Conf. on Robotics and Automation (ICRA),
pages 3212–3217. IEEE.
Rusu, R. B., Marton, Z. C., Blodow, N., and Beetz, M.
(2008). Persistent point feature histograms for 3d
point clouds. In Proc. of the 10th Int. Conf. on In-
telligent Autonomous Systems.
Salti, S., Tombari, F., and Di Stefano, L. (2010). On the
use of implicit shape models for recognition of object
categories in 3d data. In ACCV (3), Lecture Notes in
Computer Science, pages 653–666.
SHape REtrieval Contest 2007 (2014).
Aim@shape watertight dataset. Available at
http://watertight.ge.imati.cnr.it/.
Sipiran, I. and Bustos, B. (2011). Harris 3d: a robust exten-
sion of the harris operator for interest point detection
on 3d meshes. The Visual Computer, 27(11):963–976.
Tombari, F., Salti, S., and Di Stefano, L. (2010). Unique
signatures of histograms for local surface description.
In Proc. of the European Conf. on computer vision
(ECCV), ECCV’10, pages 356–369. Springer-Verlag.
Wittrowski, J., Ziegler, L., and Swadzba, A. (2013). 3d
implicit shape models using ray based hough voting
for furniture recognition. In 3DTV-Conference, 2013
Int. Conf. on, pages 366–373. IEEE.
Zhong, Y. (2009). Intrinsic shape signatures: A shape
descriptor for 3d object recognition. In 2009 IEEE
12th Int. Conf. on Computer Vision workshops, ICCV,
pages 689–696.
ImplicitShapeModelsfor3DShapeClassificationwithaContinuousVotingSpace
43
