
Real-time Detection and Recognition of Machine-Readable Zones with
Mobile Devices
Andreas Hartl, Clemens Arth and Dieter Schmalstieg
Institute for Computer Graphics and Vision, Graz University of Technology, Inffeldgasse 16, 8010 Graz, Austria
Keywords:
Machine-Readable Zone, Text, Detection, Recognition, Document Inspection, Mobile Phone.
Abstract:
Many security documents contain machine readable zones (MRZ) for automatic inspection. An MRZ is in-
tended to be read by dedicated machinery, which often requires a stationary setup. Although MRZ information
can also be read using camera phones, current solutions require the user to align the document, which is rather
tedious. We propose a real-time algorithm for MRZ detection and recognition on off-the-shelf mobile devices.
In contrast to state-of-the-art solutions, we do not impose position restrictions on the document. Our system
can instantly produce robust reading results from a large range of viewpoints, making it suitable for document
verification or classification. We evaluate the proposed algorithm using a large synthetic database on a set of
off-the-shelf smartphones. The obtained results prove that our solution is capable of achieving good reading
accuracy despite using largely unconstrained viewpoints and mobile devices.
1 INTRODUCTION
Checking travel or identity documents is a common
task. Especially in situations with a large through-
put of individuals, the time for checking such doc-
uments is very limited. The machine readable zone
(MRZ) found on documents such as passports, visas
and ID cards was introduced with the goal to speed
up identity checks and to avoid human error in read-
ing textual ID data (ICAO, 2008). There are three
different types of MRZ, usually placed on the iden-
tity page of machine-readable travel documents. They
consist of a paragraph with two or three parallel lines
of black OCR-B text (fixed width and size) with fixed
inter-line distance. These lines contain personal infor-
mation about the owner, information about the docu-
ment, and various checksums.
Reading MRZ data usually requires dedicated ma-
chinery, be it stationary or mobile. In the context of
mobile application, there is also additional hardware,
which can be attached to standard mobile phones
12
Besides, there are mobile applications, which claim to
support robust reading of MRZ data from the built-in
camera of the device (Smart 3D OCR MRZ
3
, ABBY
1
http://www.access-is.com
2
http://www.movion.eu/grabba
3
http://smartengines.biz
on Device OCR
4
, Keesing AuthentiScan
5
or Ju-
mio FastFill/Netverify
6
). All approaches have in
common, that the MRZ must be aligned with the im-
age capture device before the actual reading operation
can take place. This requirement prolongs reading
time and thus runs against the original intention of
machine-readable travel documents.
We want to stress the fact that although the MRZ is
designed to be read by automatic machinery, solving
the task in such a general setting as proposed in this
work is far from trivial, as is the character recognition.
As there is no prior knowledge about the presence of
a MRZ, the algorithm has to identify the area of in-
terest automatically in real-time, despite motion blur
and all other adversities emerging in real-world mo-
bile phone image acquisition. The subsequent charac-
ter recognition algorithm is challenged by the need for
perfect recognition performance, to make the overall
system competitive - we will show that our approach
provides an adequate solution to these problems.
The main contribution of this work is a real-
time solution for detecting and recognizing Machine-
Readable Zones on arbitrary documents using off-the-
shelf mobile devices without additional hardware. In
contrast to current mobile applications that use the
4
http://www.abbyy-developers.eu
5
https://www.keesingtechnologies.com
6
https://www.jumio.com
79
Hartl A., Arth C. and Schmalstieg D..
Real-time Detection and Recognition of Machine-Readable Zones with Mobile Devices.
DOI: 10.5220/0005294700790087
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 79-87
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
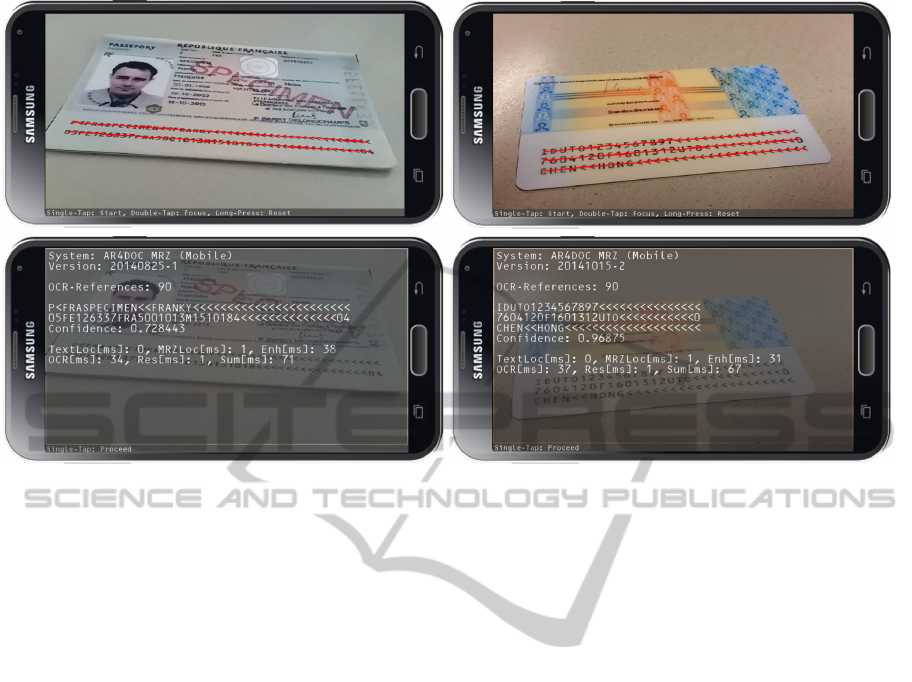
Figure 1: Top Row: Robust detection of Machine-Readable Zones despite perspective distortion. Bottom Row: Reading
results and runtime (Samsung Galaxy S5).
built-in camera, much broader variations in the view-
ing direction are tolerated during reading. In addition,
visual feedback about the status of the operation is
given to the user in order to serve as visual guidance
for the process (see Figure 1). Since there is no pub-
licly available database for developing and evaluating
MRZ reading algorithms, we also contribute a large
database of synthetic MRZ data, covering a broad
range of diverse acquisition settings, backgrounds and
view points, which we will release publicly. The
database is used to evaluate our approach, giving a
baseline for future developments in MRZ reading.
2 RELATED WORK
Standard CV techniques for text detection can
be mainly categorized into texture-based and
component-based approaches. In texture-based ap-
proaches, sliding windows and a subsequent classifier
are used for robust detection. However, the compu-
tation of text masks for an OCR stage may require
additional effort. Component-based approaches tend
to compute single characters through segmentation
and group them together to form lines or words.
Relevant approaches are often rather efficient and
provide text masks as a by-product. However,
such bottom-up approaches require region filtering
operations for improved robustness. Although an
MRZ has a regular structure, solving the detection
and recognition task is closely related to reading text
in natural scenes.
2.1 Text Detection and Recognition
(Liu and Sarkar, 2008) detect candidates for text re-
gions with local adaptive thresholds (binarization).
They perform a grouping step considering geomet-
ric properties, intensity and shape. (Zhu et al., 2007)
segment and detect text using binarization and sub-
sequent boosting in a cascade for reduction of run-
time. (Liu et al., 2012) use an extended local adaptive
thresholding operator, which is scale-invariant. Re-
gions are filtered using character stroke features and
are then grouped using a graph structure. Color clus-
tering is used by (Kasar and Ramakrishnan, 2012)
to produce text candidates. They use twelve differ-
ent features (geometry, contour, stroke, gradient) in a
filtering stage employing a Support Vector Machine
(SVM).
Maximally Stable Extremal Regions (MSER),
first proposed by (Matas et al., 2002) are used by
(Merino-Gracia et al., 2012) in a system for sup-
porting visually impaired individuals. They employ
graph-based grouping on filtered regions for the fi-
nal result. (Donoser et al., 2007) use MSER to track
and recognize license plate characters. (Neumann and
Matas, 2011) extend MSER using topological infor-
mation and conduct exhaustive search on character
sequences, followed by a grouping step and SVM-
based validation. They consider powerful grouping to
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
80

Institute for Computer Graphics and Vision – Graz University of Technology - Austria
2
Hartl, Schmalstieg
Graz – 12.12.2013
AR4Doc
MRZ
Localization
frame i
Check of
Structure
Estimation of
Transformation
Rectification/
Upsampling
OCR
character
confidences
Fusion
Text
Localization
MRZ
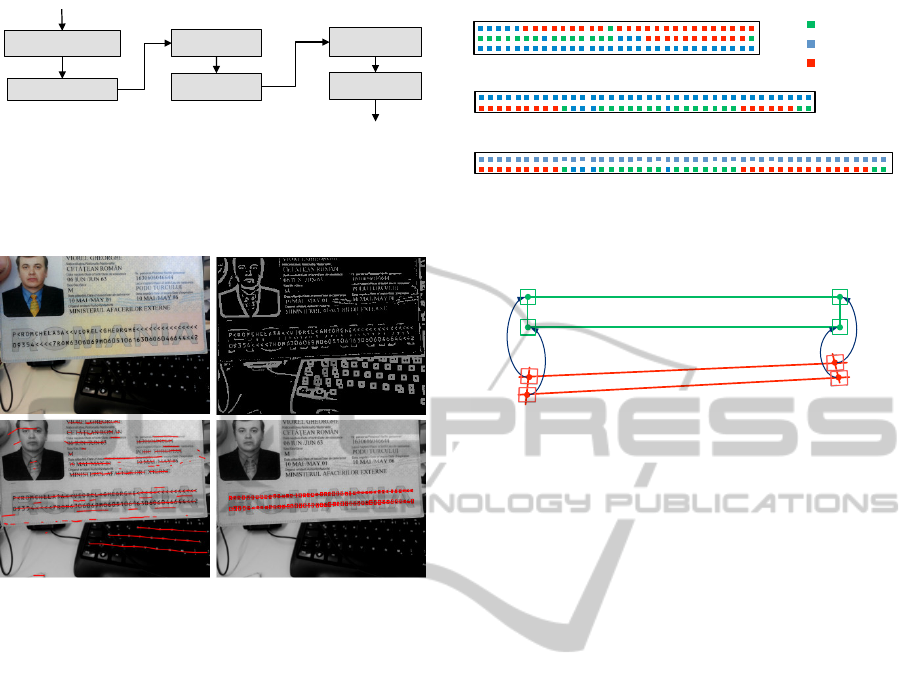
Figure 2: Outline of our algorithm for mobile MRZ read-
ing. The MRZ structure is detected from text groups. Then,
individual characters are rectified using an estimated trans-
formation and fed into a custom OCR stage. Several frames
are fused together for better performance.
be important for getting good results. (
´
Alvaro Gonza-
lez et al., 2012) combine MSER with local adaptive
thresholds and also use an SVM-based classifier for
detection of characters.
There are several works which use morphological
operations to segment text regions. (Fabrizio et al.,
2009a) detect text in street-level images using toggle-
mapping and SVM-based validation. (Minetto et al.,
2010) extended this regarding scale-invariance. In ad-
dition, a Fuzzy HOG descriptor can be added for im-
proved performance (Minetto et al., 2011).
(Epshtein et al., 2010) exploit the observation of
constant character stroke width using a novel im-
age operator called Stroke-Width Transform. This
is based on the evaluation of opposing gradients
on the basis of an edge map. They employ sev-
eral filtering operations to obtain words. (Neumann
and Matas, 2012) detect text using extremal regions,
which are invariant regarding blurred images, illu-
mination, color, texture and low contrast. Their
approach employs a subsequent classification step
(Boosting, SVM).
(Saoi et al., 2005) use wavelet-coefficients for text
detection. (Mishra et al., 2012) first detect characters
using HOG features and a SVM in a sliding window.
They also use a lexicon-based prior and combine the
available information in an optimization step. (Sun
et al., 2010) evaluate several gradient images and ver-
ify the result using a visual saliency operator. (Yi and
Tian, 2011) compute regions based on gradients and
color information. They propose two different algo-
rithms for grouping, which have a major impact on
accuracy. (Pan et al., 2011) follow a hybrid approach
by computing boosted HOG features and binarization
with region computation.
2.2 Real-time Application on Mobile
Phones
Real-time reading of MRZ data on mobile devices
is different from performing this task on stationary
devices. Due to limitations of the camera resolu-
tion and processing capabilities (CPU, GPU, RAM),
only images with lower resolution can be processed,
if constant feedback and responsive application be-
havior is desired. An efficient localization is desir-
able, because it allows to give immediate feedback
to the user. For this reason, initial tests were car-
ried out using component-based approaches due to
the real-time requirements of the task. We experi-
mented with several approaches such as local adaptive
thresholding (Shafait et al., 2008), (Bataineh et al.,
2011), Maximally Stable Extremal Regions (Matas
et al., 2002) and Stroke-Width Transform (Epshtein
et al., 2010). However, we found none to be suit-
able regarding a reasonable trade-off between seg-
mentation performance and computing requirements.
Subsequent experiments with segmentation based on
Toggle-Mapping (Fabrizio et al., 2009b) gave promis-
ing results. Although this approach generates more
noise than most competitors, this can be handled in a
subsequent filtering stage.
3 ALGORITHM
We identified a set of properties for text on documents
- in particular for the MRZ - which are useful for de-
tection and reading. Text regions on documents are
generally much smaller than text-like distortions in
the background. A local region containing text nor-
mally consists of a single color with limited varia-
tion, and the stroke width of each character is roughly
constant. All character boundaries are closed, and
connecting lines on the contour are smooth. These
boundaries correspond largely with edges detected in
the input image. Single characters within text regions
generally have very similar properties and are con-
nected along an oriented line. In most cases, a mini-
mum number of characters per text region can be as-
sumed..
The approach we suggest for mobile MRZ reading
works in four steps. First, the location of candidate
text must be determined in the image. From this infor-
mation, the MRZ is detected by considering the spa-
tial layout between candidate groups. Then, a local
transformation for each character is estimated, which
can be used for rectification, followed by the recog-
nition of characters, giving a confidence value w.r.t.
each character of the relevant subset of the OCR-B
font. Finally, information from several input frames
is fused in order to improve the result (see Figure 2).
We will now discuss these steps in more detail.
Real-timeDetectionandRecognitionofMachine-ReadableZoneswithMobileDevices
81
Institute for Computer Graphics and Vision – Graz University of Technology - Austria
1
Hartl, Schmalstieg
Graz – 12.12.2013
AR4Doc
Segmentation
frame i
Labeling
Grouping
Split/Merge
words
Preprocessing
Filtering
Figure 3: Outline of the text detection approach used in our
framework. Connected components are obtained from an
initial segmentation step, labeled and filtered. Then, they
are pair-wise grouped and split into words, providing the
basis for MRZ detection.
Figure 4: Steps in our algorithm. Input-image (top-left),
filtered regions (top-right), filtered pairs from Delaunay tri-
angulation (bottom-left), detection result (bottom-right).
3.1 Text Detection
We employ Toggle Mapping and linear-time region
labeling as basic building blocks for initial generation
of connected components (see Figure 3). Initial fil-
tering is done based on region geometry and bound-
ary properties (area, extension, aspect ratio, fill ratio,
compactness). We also experimented with edge con-
trast and stroke width, but these did not improve re-
sults significantly at that stage.
Similar regions are grouped together based on
region-properties and spatial coherence of characters.
For reasons of efficiency, a Delaunay triangulation is
used for getting an initial pair-wise grouping. Pair-
wise connections in the graph are then filtered us-
ing various relative criteria (height, distance, position-
offset, area, angle, grey-value, stroke-width) followed
by generation of strongly connected components (Tar-
jan, 1972). This gives a series of ordered groups,
ideally representing single text words, but, depend-
ing on parametrization and document structure, sev-
eral words can be contained (see Figure 4). Therefore,
an additional filtering step is employed.
In a split/merge approach based on group prop-
erties (min. number of components, max./min. dis-
TD-3: 2x44
alphabetic
numeric
num./alpha.
TD-2: 2x36
TD-1: 3x30
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
Figure 5: Structure of Machine-Readable Zones. There are
three different types, which contain two or three lines of
text. This corresponds to 90, 72 or 88 individual characters.
world&space&
image&space&
T"
P
c0I&
P
c1I&
P
c2I&
P
c3I&
P
c3W&
P
c2W&
P
c1W&
P
c0W&
Figure 6: Rectification of Characters: First, a global trans-
formation T is estimated using intersections points of fitted
lines in image space and the corresponding world coordi-
nates. Then, a local transformation can be estimated per
character, which is then used for patch warping.
tances, direction, grey-value, area, stroke-width), fi-
nal text groups are generated.
From the filtered groups, the individual compo-
nents of the MRZ can be detected by analysis of their
geometry. We search for groups fulfilling a minimum
length requirement (30 characters). During selection,
their horizontal and vertical distances are analyzed,
finally giving a number of groups that are consid-
ered for processing in the optical character recogni-
tion stage.
3.2 Rectification
The detected characters can be rectified using MRZ
structure information (see Figure 5). First, horizon-
tal and vertical lines are fitted onto the detected MRZ
components using linear regression on their centroids.
These lines are further intersected in order to give im-
proved estimates of the four outermost character cen-
ters P
cI
. Using the known properties of the OCR-B
font, corresponding coordinates P
cW
can be computed
in rectified (world) space, which allow to estimate a
perspective transformation T. For each character cen-
troid, as obtained from the intersection process, the
limits of the patch can be determined in world space
using font properties and then projected into the input
image. Now a local transformation can be estimated
for each character, which can be used for rectifica-
tion (see Figure 6). In order to improve the input for
the OCR stage, we perform up-sampling of character
patches during warping.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
82

3.3 Optical Character Recognition
The OCR stage uses the result of a subsequent bina-
rization step as input data. We use Toggle Mapping
for this task, label the obtained binary mask and esti-
mate a minimum bounding box for the character.
Through a careful selection of frames, a small
number of samples is sufficient for the recognition of
single characters. We employ an overlap-metric for
character recognition which is computed on a regular
grid (Hu et al., 1999). We compute the local over-
lap for each cell and store it as a feature-vector. Us-
ing the L
1
distance, the similarity concerning a num-
ber of reference templates can be computed, which
is also treated as a confidence value. We use ARM
NEON
7
instructions in the matching stage in order to
be able to deal with a higher number of template char-
acters. We generated the initial samples by rendering
true-type fonts and then added a small number of real
samples, which were extracted using the proposed ap-
proach.
3.4 Frame Fusion
When working with live-video, several frames can be
processed on the mobile device for improving robust-
ness. For a subsequent fusion process, correspon-
dences between characters must be established. In the
fashion of tracking by detection, the structure of the
initial detection result is considered whenever search-
ing for suitable frames.
In each frame i, for every MRZ character j, dis-
tances d
i, j,k
concerning all known references k can
be recorded. For each entry, the mean value w.r.t. all
frames is computed: d
j,k
= mean(d
i, j,k
). The final re-
sult per character is then computed as the one having
the smallest distance: q
i
= max(q
j,k
).
4 SYNTHETIC MRZ DATASET
Due to legal issues, it is not possible to get hold of
a large number of identity documents for evaluation.
Therefore a large database for developing and evaluat-
ing MRZ reading algorithms is not publicly available.
We collected a set of different ID documents and
passports from Google images, using only images
marked as free for modification and distribution. We
sorted those documents according to their MRZ type
and systematically removed the MRZ through im-
painting. We then use these document templates with
7
http://www.arm.com/products/processors/technologies/
neon.php
Table 1: Properties of the synthetic database. It contains
over 11000 different Machine-Readable Zones in more than
90000 individual images.
Database Properties
# Background hard medium easy
Images 10 10 10
Image Resolution 640x480
# ID Documents
Type 1 Type 2 Type 3
10 24 4
# Single Images 24,000 57,600 9,600
# Image Sequences 100 240 40
# different MRZ 3,100 7,440 1,240
Total database size 22.5 GB
different backgrounds and render both the document
and a randomly generated MRZ string of the corre-
sponding type. The MRZ string is generated by lever-
aging a public database of common names
8
, using dif-
ferent nationality codes
9
and adding a random time
stamp as the birth date, the date of issue and the date
of expiry. Through this generic approach, we can cre-
ate any number of example documents, single images
and also entire frame sequences. The total number of
different MRZ is over 11.000, the number of individ-
ual images is more than 90.000. The properties of the
final database are listed in Table 1.
Single Images. To generate realistic views of the
documents, typical viewpoints are simulated by trans-
formation and rendering of the current template-MRZ
combination. In order to mimic typical user behavior,
small local changes in transformation are introduced
to create a number of images around a selected global
setting. Noise and blur is added to the rendered doc-
ument to increase realism. These documents are con-
sidered for the evaluation of algorithms based on sin-
gle snapshots. Some sample images are depicted in
Figure 7. To also allow for ID document detection
algorithms to work on the proposed dataset, different
backgrounds are used to reflect different levels of de-
tection complexity.
Image Sequences. As mobile devices can be used
to acquire entire frame sequences dynamically, we
also created a set of frame sequences. We recorded
several motion patterns of a mobile device over a pla-
nar target, storing the calculated pose for each frame
(Wagner et al., 2010). The average length of these
sequences is about 100 frames. For each frame, we
render the template-MRZ combination using the pre-
viously recorded pose onto frames from a video taken
8
https://www.drupal.org/project/namedb
9
https://www.iso.org/obp/ui/#search/code
Real-timeDetectionandRecognitionofMachine-ReadableZoneswithMobileDevices
83

Figure 7: Single MRZ documents placed in front of a cluttered background image. Backgrounds with different complexities
are used, starting from almost uniform to completely cluttered.
-1.5
-2
-0.5
-1
y
0.5
0
1.5
1
2
2
1
0
x
-1
-2
0
-2
-4
-1.5
-2
-0.5
-1
y
0.5
0
1.5
1
2
2
1
0
x
-1
-2
-4
-2
0
-1.5
-2
-0.5
-1
y
0.5
0
1.5
1
2
2
1
0
x
-1
-2
-4
-2
0
-1.5
-2
-0.5
-1
y
0.5
0
1.5
1
2
2
1
0
x
-1
-2
0
-2
-4
Figure 8: Top: Sequences of frames rendered onto a random background, and the corresponding camera trajectory. For better
visibility, only every 25
th
frame is drawn as a frustum. Bottom: Sample frames from two sequences. As the document is
rendered into a video, the background changes with each frame.
at a public train station. Thereby we also allow the
evaluation of approaches which are able to detect and
track a document and combine the reading results
over multiple frames. Sample camera paths and cor-
responding rendered image sequences are shown in
Figure 8.
5 EVALUATION
In the following experiments, we determine the ac-
curacy of MRZ detection, character reading and run-
time for all relevant steps of the proposed approach.
We evaluate a prototype of the MRZ reader on var-
ious mobile devices running Android and iOS oper-
ating systems with images from the aforementioned
database
10
.
5.1 Reading Accuracy
Reading accuracy is evaluated using single and mul-
tiple frames taken from the single-image database
(see Table 1). While individual character recogni-
tion is barely affected by using more frames, the per-
formance of MRZ detection is noticeably increased
(see Figure 9). A MRZ detection rate of 88.18% is
achieved by using five frames, along with a character
10
A submission video can be found here: http://
tinyurl.com/moq5ya2
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
84
0 1 2 3 4 5 6
0
10
20
30
40
50
60
70
80
90
100
#(frames)
accuracy [%]
mrz detection/reading performance
mrz−detection
char−reading
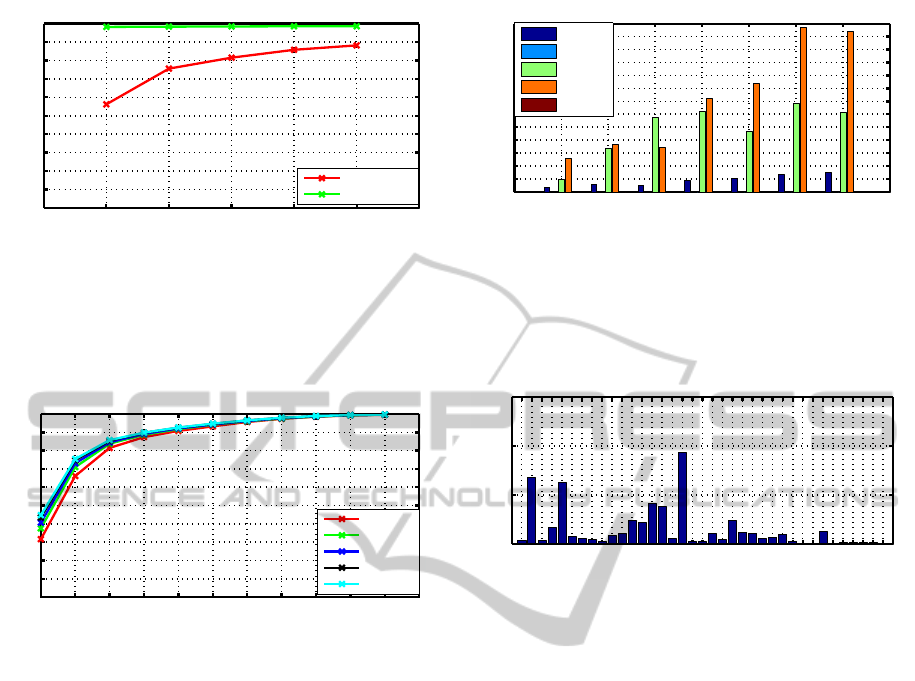
Figure 9: MRZ detection and character reading accuracy
(single-image database): While individual character recog-
nition is barely affected by using more frames, the perfor-
mance of MRZ detection is noticeably increased. Note:
Character reading results are given relative to successful de-
tection.
0 1 2 3 4 5 6 7 8 9 10 11
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
max. character error
reading rate
full mrz reading performance
1 frame(s)
2 frame(s)
3 frame(s)
4 frame(s)
5 frame(s)
Figure 10: Full MRZ reading accuracy (single-image
database): Despite reasonable character recognition rates,
reading entire MRZs is still difficult, since no dictionary can
be used for most parts. However, fusion of reading results
from several frames improves reading rates by up to 15%.
reading rate of 98.58%. In terms of successful detec-
tion, this is a significant improvement over processing
single shots (detection: 56.12%) on low-resolution
mobile-images in real-time. Although the detection
and reading of individual characters works reason-
ably well, getting correct readings for the entire MRZ
is still a challenging task, since no dictionary can be
used for large parts of the MRZ (see Figure 10). How-
ever, frame fusion helps to improve the results by up
to 15%.
When considering image sequences, a detection
rate of 99.21% is achieved. From these detections
98,9% of characters where successfully read. Consid-
ering all frames of a sequence, a fully correct MRZ
can be read in 63.40% of all cases.
Obviously, MRZ detection performance and char-
acter reading are related to the input pose (see Fig-
ures 13, 14). We can observe that the proposed ap-
proach can detect and read MRZ data despite perspec-
tive distortion, saving document alignment time for
the user. Most gaps seem to be caused by segmen-
0 1 2 3 4 5 6 7 8
0
10
20
30
40
50
60
70
80
90
100
110
120
130
iPhone 5s | Galaxy S5 | Nexus 10 | Nexus 4 | Optim. 4x | Galaxy S2 | iPh. 4s
average runtime [ms]
avg. runtime per frame
text det.
mrz det.
rectif.
ocr
fusion
Figure 11: Runtime of the prototype for various mobile
devices (iOS, Android): Runtime is dominated by patch
warping and optical character recognition. In particular, the
timespan needed for MRZ detection from text groups and
the final fusion step is negligible. Detection and reading
from a single frame takes around 35 ms on the iPhone 5s.
ABCDEFGH I J KLMNOPQRSTUVWXYZ0 1 2 3 4 5 6 7 8 9 <
0
0.1
0.2
0.3
character
rel. error
relative errors per character type
Figure 12: Errors for individual characters: In most cases,
the characters B,E and Q are confused with others. Note:
Individual errors are given relative to the sum of all errors
across all characters.
tation artifacts, which cause unresolvable ambiguities
in the grouping stage. However, the largest gap for
the exemplary sequence consists of just three frames,
which corresponds to a maximum waiting time of 0.1
s for getting processable data, or 0.5 s when fusing
five frames (assuming a framerate of 30 FPS).
5.2 Algorithm Runtime
Runtime is dominated by the OCR part of the al-
gorithm, the rectification, segmentation and feature
computation (see Figure 11), while the initial text de-
tection and subsequent fusion operations take up only
a fraction of the overall runtime.
In total, reading a single MRZ takes around 35 ms
on the iPhone 5s (iOS). The closest competitor is the
Samsung Galaxy S5 smartphone (Android), taking
around 70 ms per frame. The iPhone 5s gains most
of its speed-up during warping of individual charac-
ters. On our development machine (MBP i7, 2 GHZ),
the overall runtime per frame is around 14 ms.
Real-timeDetectionandRecognitionofMachine-ReadableZoneswithMobileDevices
85

0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125
0
10
20
30
40
50
60
70
80
90
100
frame id
accuracy [%]
mrz−detection
char−reading
Figure 13: Exemplary result of processing an entire image sequence of the synthetic database. The maximum gap size is three
frames, which corresponds to a waiting time of 0.1 s, until processable data arrives (assuming a framerate of 30 FPS).
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125
−30
−20
−10
0
10
20
30
frame id
orientation [°]
rx
ry
rz
Figure 14: Corresponding orientation throughout the exemplary image sequence. The example document is captured from
viewpoints that differ considerably from the ideal setting.
6 DISCUSSION
Based on the results of our experimental evaluation,
some individual aspects deserve further discussion as
follows.
MRZ Detection. Detection from a single frame is
difficult, as it might fail if the document is viewed un-
der steep angles. The overall MRZ recognition pro-
cess therefore clearly benefits from using a continu-
ous video feed (see Figure 9). Due to the efficiency
of our approach, frames can be processed in real-time
and instant feedback can be given to the user. Due to
the larger amount of data, missing single frames is not
critical for the task at hand.
Character Recognition. Although reasonable
character recognition rates (exceeding 90%) could be
obtained during our evaluation, a closer inspection
reveals that in most cases, the current prototype
confuses the characters B, E and Q with similar
samples (see Figure 12). Beside character confusion,
occasional issues in character segmentation make
up most of the remaining cases due to region splits.
This could be improved by using more advanced
pre-processing or a machine-learning approach on
the extracted patches (e.g., SVM).
It is important to note that for full MRZ reading,
a heavily tuned character recognition engine has to
be employed, suffering from a failure rate of at most
1e
−4
%. Given the fact that real-world samples are
hardly to be found in large quantities, this turns
out to be a challenging problem on its own.
Image Resolution. We found that using a video
stream with higher resolution (i.e., Full HD) in our
mobile prototype only gives small improvements over
fusing multiple frames with lower resolution, as pro-
posed in this paper. When processing such a stream
on Android, there is noticeable latency even though
the full resolution is only used in the OCR stage. Due
to this delay, there can be a lot of change between
subsequent frames, causing occasional blur depend-
ing on user behavior. Since this is particularly un-
desirable regarding usability, it seems reasonable to
stick with low or medium resolution images, employ
an advanced frame selection strategy (e.g., dep. on
sharpness or lighting) and to further improve the OCR
stage. Our aim is to create synthetic character sam-
ples with different kinds of noise and other distortions
in order to mimic all kinds of acquisition conditions
and settings, and to employ different machine learn-
ing techniques to improve upon the current approach.
7 CONCLUSIONS
We presented an approach for real-time MRZ detec-
tion and reading, which does not require accurate
alignment of the document or the MRZ. By initial
MRZ detection and fusion of results from several in-
put frames, our custom OCR stage produces reason-
able character reading results despite having to deal
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
86

with unaligned input. For evaluation purposes, we
introduced a new synthetic database, which covers
many different document backgrounds, MRZ con-
tents and viewpoints (available on request). Saving
the time required for alignment, MRZ data can be ex-
tracted faster than with state-off-the-art mobile appli-
cations.
Our approach could be improved in various ways.
If more character training data becomes available, the
template matching could be replaced with a suitable
classifier. This would certainly help to improve full
MRZ reading results including runtime. Tracking the
MRZ should increase robustness, since more input
data would be available for the OCR stage. For prac-
tical reasons, slightly bent documents should also be
handled.
ACKNOWLEDGMENTS
This work is supported by Bundesdruckerei GmbH.
REFERENCES
´
Alvaro Gonzalez, Bergasa, L. M., Torres, J. J. Y., and
Bronte, S. (2012). Text location in complex images.
In ICPR, pages 617–620.
Bataineh, B., Abdullah, S. N. H. S., and Omar, K. (2011).
An adaptive local binarization method for document
images based on a novel thresholding method and dy-
namic windows. Pattern Recogn. Lett., 32(14):1805–
1813.
Donoser, M., Arth, C., and Bischof, H. (2007). Detect-
ing, tracking and recognizing license plates. In ACCV,
pages 447–456, Berlin, Heidelberg. Springer-Verlag.
Epshtein, B., Ofek, E., and Wexler, Y. (2010). Detecting
text in natural scenes with stroke width transform. In
CVPR, pages 2963–2970.
Fabrizio, J., Cord, M., and Marcotegui, B. (2009a). Text
extraction from street level images. In CMRT, pages
199–204.
Fabrizio, J., Marcotegui, B., and Cord, M. (2009b). Text
segmentation in natural scenes using toggle-mapping.
In ICIP, pages 2349–2352.
Hu, J., Kashi, R., and Wilfong, G. (1999). Document clas-
sification using layout analysis. In 1999. Proceedings
of the International Workshop on Database and Ex-
pert Systems Applications, pages 556–560.
ICAO (2008). Machine readable travel documents.
Kasar, T. and Ramakrishnan, A. G. (2012). Multi-script and
multi-oriented text localization from scene images. In
CBDAR, pages 1–14, Berlin, Heidelberg. Springer-
Verlag.
Liu, X., Lu, K., , and Wang, W. (2012). Effectively localize
text in natural scene images. In ICPR.
Liu, Z. and Sarkar, S. (2008). Robust outdoor text detection
using text intensity and shape features. In ICPR.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2002). Ro-
bust wide baseline stereo from maximally stable ex-
tremal regions. In BMVC, pages 36.1–36.10.
Merino-Gracia, C., Lenc, K., and Mirmehdi, M. (2012). A
head-mounted device for recognizing text in natural
scenes. In CBDAR, pages 29–41, Berlin, Heidelberg.
Springer-Verlag.
Minetto, R., Thome, N., Cord, M., Fabrizio, J., and Mar-
cotegui, B. (2010). Snoopertext: A multiresolution
system for text detection in complex visual scenes. In
ICIP, pages 3861–3864.
Minetto, R., Thome, N., Cord, M., Stolfi, J., Precioso, F.,
Guyomard, J., and Leite, N. J. (2011). Text detection
and recognition in urban scenes. In ICCV Workshops,
pages 227–234.
Mishra, A., Alahari, K., and Jawahar, C. V. (2012). Top-
down and bottom-up cues for scene text recognition.
In CVPR.
Neumann, L. and Matas, J. (2011). Text localization in
real-world images using efficiently pruned exhaustive
search. In ICDAR, pages 687–691. IEEE.
Neumann, L. and Matas, J. (2012). Real-time scene text
localization and recognition. In CVPR, pages 3538–
3545.
Pan, Y.-F., Hou, X., and Liu, C.-L. (2011). A hybrid ap-
proach to detect and localize texts in natural scene
images. IEEE Transactions on Image Processing,
20(3):800–813.
Saoi, T., Goto, H., and Kobayashi, H. (2005). Text detec-
tion in color scene images based on unsupervised clus-
tering of multi-channel wavelet features. In ICDAR,
pages 690–694. IEEE Computer Society.
Shafait, F., Keysers, D., and Breuel, T. (2008). Efficient
implementation of local adaptive thresholding tech-
niques using integral images. In SPIE DRR. SPIE.
Sun, Q., Lu, Y., and Sun, S. (2010). A visual attention based
approach to text extraction. In ICPR, pages 3991–
3995.
Tarjan, R. E. (1972). Depth-first search and linear graph
algorithms. SIAM Journal on Computing, 1(2):146–
160.
Wagner, D., Reitmayr, G., Mulloni, A., Drummond, T.,
and Schmalstieg, D. (2010). Real-time detection
and tracking for augmented reality on mobile phones.
TVCG, 16(3):355–368.
Yi, C. and Tian, Y. (2011). Text string detection from nat-
ural scenes by structure-based partition and grouping.
IEEE Transactions on Image Processing, 20(9):2594–
2605.
Zhu, K.-h., Qi, F.-h., Jiang, R.-j., and Xu, L. (2007). Auto-
matic character detection and segmentation in natural
scene images. Journal of Zhejiang University SCI-
ENCE A (JZUS), 8(1):63–71.
Real-timeDetectionandRecognitionofMachine-ReadableZoneswithMobileDevices
87
