
Localization of Visual Codes using Fuzzy Inference System
P
´
eter Bodn
´
ar and L
´
aszl
´
o G. Ny
´
ul
Department of Image Processing and Computer Graphics, University of Szeged, Szeged, Hungary
Keywords:
QR Code, Object Detection, Pattern Recognition, Image Texture Analysis, Histogram.
Abstract:
Usage of computer-readable visual codes is common in everyday life. The reading process of visual codes
consists of two steps, localization and data decoding. This paper introduces a fast and robust method for
localization of visual codes using Fuzzy Inference Systems based on simplistic, attentive features which can
be optionally extended with cell histograms. Input image properties, assigned membership functions and
efficiency of the system has been evaluated and discussed, showing FIS is a viable alternative for rapid QR
code recognition in the image domain. The basic approach can be also used with lookup tables, that speeds up
image cell evaluation and makes it ideal for embedded systems.
1 INTRODUCTION
Two-dimensional visual code formats are designed
aiming automatic readability by computers and em-
bedded systems. Image quality and acquisition tech-
niques vary considerably and each application has its
own requirements for detection speed and accuracy,
making the task more complex.
The recognition process consists of two steps, lo-
calization and decoding. There already are works
proposing various ways to automatically localize
codes in images. A paper suggests localization of the
locator patterns of QR codes using three scan-lines
(Chu et al., 2011), however, this is sensitive to noise
and camera shaking. Other works (Ohbuchi et al.,
2004; Lin and Lin, 2013) involve mathematical mor-
phology, which is very tolerant to noise and blur, but
it can also be time-consuming, thus making real-time
implementations more difficult on embedded systems.
There is also a work using Haar-based classifier for
the locator patterns of QR codes (Belussi and Hirata,
2011), which is fast and can have high precision with
a well-chosen application setup and training database.
A QR code is attentive, which means it requires
little human observation to identify. Since its fea-
tures are observable on a higher level than the texture
of its carrier material, they are easy to recognize by
humans, but difficult to quantitatively define. Terms
and operators of fuzzy logic are a viable option for
QR code localization based on statements that include
vagueness and uncertainty.
In this paper, we propose a Fuzzy Inference Sys-
tem (FIS) based on the most simplistic, attentive fea-
tures of a QR coded, and test the proposed algorithm
on other popular 2D code types. The described ap-
proach can be efficient with respect to computation
time and storage, and most of the computed features
can be approximated using only a subset of pixels,
that allows fine-tuning of the application to be faster
or more accurate. These properties can make FIS-
based localization a preferred choice over other ex-
isting algorithms. After the code is located, there are
reliable methods for correction of camera shaking and
orientation (Chu et al., 2011), and correction of per-
spective distortion (Ohbuchi et al., 2004). Decoding
is not discussed here, since after a successful localiza-
tion step, retrieving the embedded data can be consid-
ered straightforward.
2 THE PROPOSED
LOCALIZATION METHOD
Input image is uniformly divided into square blocks of
equal size. Each block serves as an input to the FIS.
Features are computed, and the FIS shows how likely
a QR code part is present in the block. After all blocks
are evaluated, a feature matrix is formed by the values
given for each block (Fig. 1(b)). Finally, the matrix is
evaluated and regions of interests are formed, that can
be re-mapped to image space, thus giving bounding
boxes to QR code candidates.
345
Bodnar P. and Nyúl L..
Localization of Visual Codes using Fuzzy Inference System.
DOI: 10.5220/0005299103450352
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 345-352
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

(a) (b)
Figure 1: Printed QR code on tablecloth (a) and its FIS fea-
ture image (b).
2.1 The Fuzzy Inference System
The proposed FIS consists of three input and one out-
put variables. Membership function (MF) parameters
are tuned each time to the end-user scenario using
statistics of a few input images. For the selection of
properties, we pursued simple features that represent
humanly observable properties. The three properties
can be summarized in the following statement: QR
code parts consist of mostly black and white pixels of
similar amounts, while having moderate to high con-
trast and low saturation.
2.1.1 Variables and Membership Functions
Our first variable is based on the absolute difference
of pixels from the 50 % gray value. Intensity values
referred in this paper, are normalized to [0,1] from
the 8-bit grayscale input images to fit the ranges of
the membership functions. The first property is
graydist avg =
1
n
∑
p∈block
|V (p) − 0.5| (1)
where n denotes the number of sampled pixels from
the block, and V (p) is the V value of the pixel in
HSV color space. From a couple of sample images,
blocks being fully covered with QR code parts as pos-
itive samples, and blocks with 0 % coverage ratio as
negatives, are extracted. After that, mean and stan-
dard deviation are computed for graydist avg. This
was 0.41 ± 0.04 for positive samples and 0.31 ± 0.12
for negatives in our first test set. That would define
two Gaussian membership functions, perfect(m =
0.41,σ = 0.04) and low(m = 0.31, σ = 0.12), how-
ever, using those would let very small tolerance and
they would not cover the whole input range. To over-
come this, Z-shaped and S-shaped membership func-
tions are used instead of Gaussians (Fig. 2(a)). A rea-
sonable Z-term for low is ZMF(0,0.41), because the
mean of graydist avg was at 0.41. For perfect, an
S-term of SMF(0.31, 0.41) is proposed, since nega-
tive sample mean was 0.31, which means, from that
point, we have no information about the block con-
tent according to this property. The endpoint of the
S-term should be 0.41, since that was our measured
mean value for the test images. This parameter would
(a) (b) (c)
Figure 2: FIS input variables. (a): Mean brightness abso-
lute difference from gray: low (yellow) and perfect (red);
(b): Mean brightness: low (yellow), perfect (orange) and
high (red); (c): Mean saturation: high (red). Parameters are
indicated in the text.
be 0.5 in the perfect case, and lower values reflect the
amount of blurring present in blocks containing QR
code parts.
The second input variable is blockavg, the mean
intensity of the block. We obtained 0.52 ± 0.13 for
positive, and 0.44± 0.31 for negative examples. Hav-
ing this value around 0.5 for positive samples is ex-
pected because of the structure of the QR code. For
negative samples, it is dependent on the content of
the block. This property seems to have small classi-
fication power, however, having the value around 0.5
is a necessary condition for a positive sample. Three
membership functions are proposed, one Gaussian for
perfect(m = 0.52, σ = 0.13) values, a ZMF(0, 0.5)
and a SMF(0.5,1) for low and high blocks, respec-
tively (Fig. 2(b)). Both of the last two MFs express
low certainty of presence of a QR code part within
the block.
The third input parameter saturation excludes re-
gions that have high saturation, since highly saturated
areas are less likely to contain QR codes. The goal
with saturation was to improve precision while keep-
ing the hit rate. Mean saturation was 0.13 ± 0.05
for positive, and 0.39 ± 0.22 for negative samples,
so a ZMF(0.13,0.39) is proposed as high, shown in
Fig. 2(c).
The output of the FIS is codeness, the certainty
of QR code texture within a block, which can be ex-
pressed by two MFs, ZMF(0,1 − x) and SMF(x,1)
with x ∈ [0, 0.5], providing different level of smooth
transitions. We used an intermediate x = 0.33 value
in our model, thus producing ZMF(0,0.67) and
SMF(0.33,1) for low and high MFs, respecively.
2.1.2 Rules
The rule set of the FIS contains the following rules:
R1 if blockavg is perfect and graydist avg is
perfect then codeness is high
R2 if blockavg is low or blockavg is high then
codeness is low
R3 if graydist avg is low then codeness is low
R4 if saturation is high then codeness is low
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
346

R1 is about positive response. Having the block-
avg and graydist avg properties in range are re-
quired conditions that have to be met simultaneously.
The blockavg is needed so high codeness cannot be
achieved with solid black or solid white blocks which
both have low saturation and high graydist avg. Fol-
lowing the same logic, we assume some contrast
within blocks, expressed by graydist avg, so solid
gray blocks will not result in high codeness. R2 is
to connect low and high MFs of blockavg, since both
indicate QR code part is not likely in that block. R3
filters out blocks by graydist avg in a similar manner
than the previous one. R4 is another exclusion filter,
which is based on the mean of saturation, as discussed
above.
2.1.3 Operators
For conjunction, minimum and a couple of product
operators are available, which behave similarly, and
show no significant difference in our case. Minimum
operator is the simplest to compute. Both blockavg
and graydist avg has to be high for high codeness,
and the decision based on the minimum of these vari-
ables suits our model. Products, like algebraic prod-
uct can also be used, however, they lead to a stricter
rule and steeper decision surface. For disjunction op-
erator, the maximum is recommended with this rule
set and MF layout, since that is the simplest operator
to compute, and in this case, where no overlapping is
present between the MFs participating in the conjunc-
tion (Fig. 2), there is no difference in the results of
maximum and the various x-sum operators available.
For the case of simplicity, minimum can be used for
activation. The usage of algebraic product would re-
sult in smoother transitions with the defuzzified out-
put variable, however, it does not affect accuracy of
the FIS significantly. For accumulation operator, the
maximum is recommended, since there are only two
MFs of the output, and they are also symmetrically
situated, thus there is no need to use complex opera-
tors at that step. In the defuzzification step, we used
Centroid, since it provides smooth transition of the
output.
2.2 Feature Matrix and Regions of
Interest
A simple approach to process the matrix is binariza-
tion by a threshold, followed by connected compo-
nent labeling, further filtered by size and compact-
ness. Calculation of the summed area matrix can fur-
ther increase processing speed.
(a) QR-50 (b) QR-100
Figure 3: Enlarged QR code parts with different amounts of
noise present.
2.3 Extension of the Feature Set with
Cell Histogram
While the above features are obtained from pixel data,
they can also be considered as a simplification of the
histogram. In some cases, the histogram is also useful
in the formation of a new input property for the FIS,
when the above inputs are not sufficient.
In case of an ideal cell containing a part of a QR
code, only black and white intensities are present cell-
wise in roughly 1:1 proportion. Smoothing of images
that contain QR code, introduces intensities closer to
the mean, and decreases the value of extreme his-
togram bins, like the ones belonging to black and
white. In general, the peaks are lowered, some bins
close to the peaks receive higher values, and others
keep their values. As a very simplistic approach, a
constant (C) can be added to the expected density
function. The proposed value of C can be the esti-
mated proportion of the smoothing kernel width (3
times its σ) and the code element width. As the Gaus-
sian kernel width increases, the code element contrast
gets lower, and at some point, code elements become
unreadable. This roughly happens when the kernel
size exceeds the code element size. Considering this,
the maximum Gaussian kernels used in our synthetic
test set has the same width as the undistorted code ele-
ment. Noise is also added to the model with Gaussian
distribution, having σ in the [0, 0.25] range in the test
database. Fig. 3(b) shows that these amounts of noise
and blur theoretically destroy the value of a code el-
ement. The value x in QR-x denote the percentage
of noise and blur added, up to these discussed max-
ima (QR-0 and QR-100 are the perfect and the hardest
cases of the data set, respectively).
The proper values of σ and C can be approximated
empirically by showing test images to the camera,
with solid cells of bright and dark intensities, and with
lines of different thickness.
Considering the amount of noise and blur this way,
the desired histogram to a particular camera setup can
be expressed in the [0,1] interval as
U
C,σ
(x) = C + (1 −C)
e
−
x
2
(ε+σ)
2
+ e
−
(1−x)
2
(ε+σ)
2
!
, (2)
LocalizationofVisualCodesusingFuzzyInferenceSystem
347

0.0
0.2
0.4
0.6
0.8
1.0
0.0 0.2 0.4 0.6 0.8 1.0
Figure 4: Expected probability functions. Red solid curve:
small C (expected smoothing) with moderate amount of ex-
pected noise C = 0.1, σ = 0.15 (example for dirty environ-
ment), blue dashed curve: larger C with smaller amount of
expected noise C = 0.3, σ = 0.01 (example for low quality
phone camera).
where ε denotes a small positive value to prevent di-
vision by zero in the perfect case. After sampling the
function and normalization of the data, a desired dis-
tribution is obtained. Different values of σ and C lead
to different distributions (Fig. 4). For cameras hav-
ing low dynamic range, contrast stretching is recom-
mended as a pre-processing step.
Histograms are more reliable when based on more
pixels, however, our goal using the least number of
pixels possible. To overcome inaccuracies that come
from histograms based on a small amount of pixels,
histogram binning is recommended.
With a given number of histogram bins b we can
compute the dissimilarity of the desired and measured
histograms using various well-known formulas. Let
B(i) the number of pixels that fall into the i-th in-
tensity bin in the measured cell histogram, B
n
(i) the
normalized B(i) and U
n
(i) the binned, normalized U-
function
U
n
(i) =
R
(i+1)/b
i/b
U
C,σ
(x)
R
1
0
U
C,σ
(x)
. (3)
For simplicity, we omit the parameters C and σ from
the notation of binned, normalized U-function and
from the derived distance measures. Nevertheless, for
any choice of parameters C and σ, there exist a dis-
tance measure of the types defined below. Eucledian
distance can be given as
D
e
(B
n
,U
n
) =
1
2
v
u
u
t
b
∑
i=1
(B
n
(i) −U
n
(i))
2
, (4)
however, that is a bin-by-bin dissimilarity measure,
which is sensitive to noise and the number of bins
(Swain and Ballard, 1991).
Normalized histograms can also be considered as
probability density functions. A common way to
compare those is the Kolmogorov-Smirnov distance
D
k
(B
n
,U
n
) = max
i
(|
ˆ
B
n
(i) −
ˆ
U
n
(i)|), (5)
Table 1: Eucledian, Kolmogorov-Smirnov and EMD simi-
larity of measured histograms to the ideal histograms, using
QR code pieces of different quality.
S
e
QR-0 QR-50 QR-100 Flat Black
U
0,0
1.000 0.7653 0.6495 0.6938 0.6464
U
0.12,0.12
0.8381 0.9210 0.7950 0.8510 0.6111
U
0.25,0.25
0.7531 0.9587 0.8543 0.9243 0.5687
S
k
QR-0 QR-50 QR-100 Flat Black
U
0,0
1.000 0.6739 0.5416 0.6250 0.5000
U
0.12,0.12
0.8045 0.8694 0.7196 0.8205 0.3045
U
0.25,0.25
0.7020 0.9327 0.7725 0.9024 0.2020
S
m
QR-0 QR-50 QR-100 Flat Black
U
0,0
1.000 0.8599 0.7522 0.8125 0.5625
U
0.12,0.12
0.9140 0.9431 0.8382 0.8985 0.5625
U
0.25,0.25
0.8716 0.9610 0.8806 0.9409 0.5625
where
ˆ
B
n
(i) and
ˆ
U
n
(i) are cumulative histograms for
the first i elements. This distance measure is widely
used for cross-bin comparison of color histograms.
Rubner et al. (Rubner et al., 2000) also proposes earth
mover’s distance (EMD) for comparison for multi-
channel images, and normalized matching distance
D
m
(B
n
,U
n
) =
1
b
b
∑
i
|
ˆ
B
n
(i) −
ˆ
U
n
(i)| (6)
as a special case, which is suitable for grayscale his-
tograms.
Table 1 shows values of these similarity values
(S
X
= 1 − D
X
|X ∈ {e,k,m}) for desired distributions
U
0,0
, U
0.12,0.12
and U
0.25,0.25
, compared to synthetic
QR codes of different levels of quality (Fig. 3), a flat
histogram F(x) = 1/b, and histogram of a solid black
image. We recommend using the matching distance
D
m
for histogram comparison, since it shows signif-
icantly higher values for this feature in the positive
case.
Results show that cell histograms of the hardest
images of the set (QR-100) have cell histograms that
show very small resemblance to the histogram of our
model. This is due to noise, smoothing, and histogram
asymmetry caused by the visual pattern variability of
the embedded data.
2.3.1 Patterns and Cell Size
Not all pixels are necessary to be sampled from the
cell, we can approximate the histogram using only
a subset of the pixels. This is sufficient for images
having only small amount of imperfections and noise,
while it reduces the computation time. However, if
the variance of QR code size is large, this undersam-
pling is quite risky because depending on the size of
the code elements in the image, the proposed method
might miss so many elements that the histogram looks
very different from a typical QR code histogram.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
348

(a) (b) (c)
Figure 5: Cell patterns for histogram sampling. (a) checker-
board pattern using 50 %, (b) 5:1 linear pattern using cca.
36 %, and (c) sparse pattern using 6.25 % of pixels for each
cell.
We recommend uniform sampling of the cell. The
checkerboard pattern is a good option, and the amount
of pixels can be further reduced using other patterns
(Fig. 5).
Cell size should be small enough to having many
of them to build a QR code, so threshold would be
chosen easily for dropping or keeping cell groups. On
the other hand, it has to be large enough to provide re-
liable statistical data for the histogram, at least tens of
pixels for each bin. Papers on visual code localization
suggest empirically (Bodn
´
ar and Ny
´
ul, 2012), or us-
ing geometrical approach (Bodn
´
ar and Ny
´
ul, 2013),
that optimal tile size is about 1/3 of the smaller di-
mension of the expected visual code in case of fea-
tures based on image partitioning. The number of his-
togram bins can also be tuned to fulfill reliability and
robustness. Too many histogram bins leads to sensi-
tivity to noise, while choosing too few bins result in
losing the feature. We recommend about 8 to 16 bins
for 8-bit grayscale images. The range of expected
code size, the desired number of bins and the mean
pixel count falling into each bin determines the usable
pattern and block size for detection. From another
point of view, the number of bins, the expected mean
pixel count and the block coverage ratio of the cho-
sen pattern defines the size of the smallest detectable
visual code.
3 EVALUATION AND RESULTS
The proposed method has been evaluated on 98 ar-
bitrarily acquired images using a 3.2 Mpx Huawei
smartphone camera, without auto-focus capabilities
and flash. Unit size of the QR codes present in those
images were about 6–10 pixels, overall QR code size
was cca. 200 ×200 pixels. Image size was 800 × 600
pixels. An example from this set is shown on Fig. 1.
Even lighting is preferred, but not necessary for the
captured images. Images with uneven lighting has
to be pre-processed with local contrast stretching per-
formed in each block. Color images are also preferred
Table 2: Evaluation of the FIS on different block offsets and
40 px block size.
Block offset T
opt
F-score Precision Hit rate AUC
10 px 0.62 0.8124 0.8349 0.8766 0.8934
20 px 0.62 0.8124 0.8354 0.8773 0.8938
40 px 0.62 0.8584 0.8377 0.8802 0.8709
0.72
0.74
0.76
0.78
0.8
0.82
0.84
0.86
20 40 60 80 100 120 140 160 180 200 220
F-score
Figure 6: Performance of the FIS with respect to block size.
for the saturation rule, that can be replaced by the rule
based on histograms in case of grayscale input im-
ages. Geometrical distortions of the code leave the
above features intact, as long as there are sufficient
blocks to form a ROI in the feature matrix.
A Core 2 Duo 3.00 GHz CPU could process
roughly 20 of these images each second, so real-
time localization is possible. The FIS can be fur-
ther optimized using ramp terms instead of ZMF
and SMF. HSV channel images can be easily com-
puted from RGB channels using V
i
= max(R
i
,G
i
,B
i
)
and S
i
= (max(R
i
,G
i
,B
i
) −min(R
i
,G
i
,B
i
))/V
i
for all
i ∈ I(x,y). Furthermore, using a lookup table instead
of online calculations is also possible, since the table
only would take one megabyte of data using precision
of two decimals, which is sufficient for the task.
As the first test, various block sizes were eval-
uated to determine optimal block size ratio accord-
ing to the expected QR code size, not involving his-
tograms. Results show that optimal block size is rang-
ing from about 20 to 35 percent of the QR code size
(Fig. 6). Performance measures were based on the
Jaccard measure. Choosing too small block size leads
to performance drop, since the attributes computed
from the blocks become less reliable, while too large
block sizes also decrease accuracy, since then only
a smaller number of blocks are fully covered with a
QR code part, and partially covered blocks are also
harder to classify. Instead of a fully universal, multi-
scale solution (Lindeberg, 1993), specific resolutions
and block sizes lead to more accurate implementa-
tions that can be important on embedded systems.
The effect of the block overlap to performance
was also evaluated and is shown in Table 2. Block
size was set to 40 px and each block was offset by 10,
20 and 40 px (meaning no overlap), respectively. Re-
sults show that evaluation with overlapping blocks did
not increase performance.
Performance of the FIS has also been evaluated
on code types other than QR codes. We assem-
LocalizationofVisualCodesusingFuzzyInferenceSystem
349
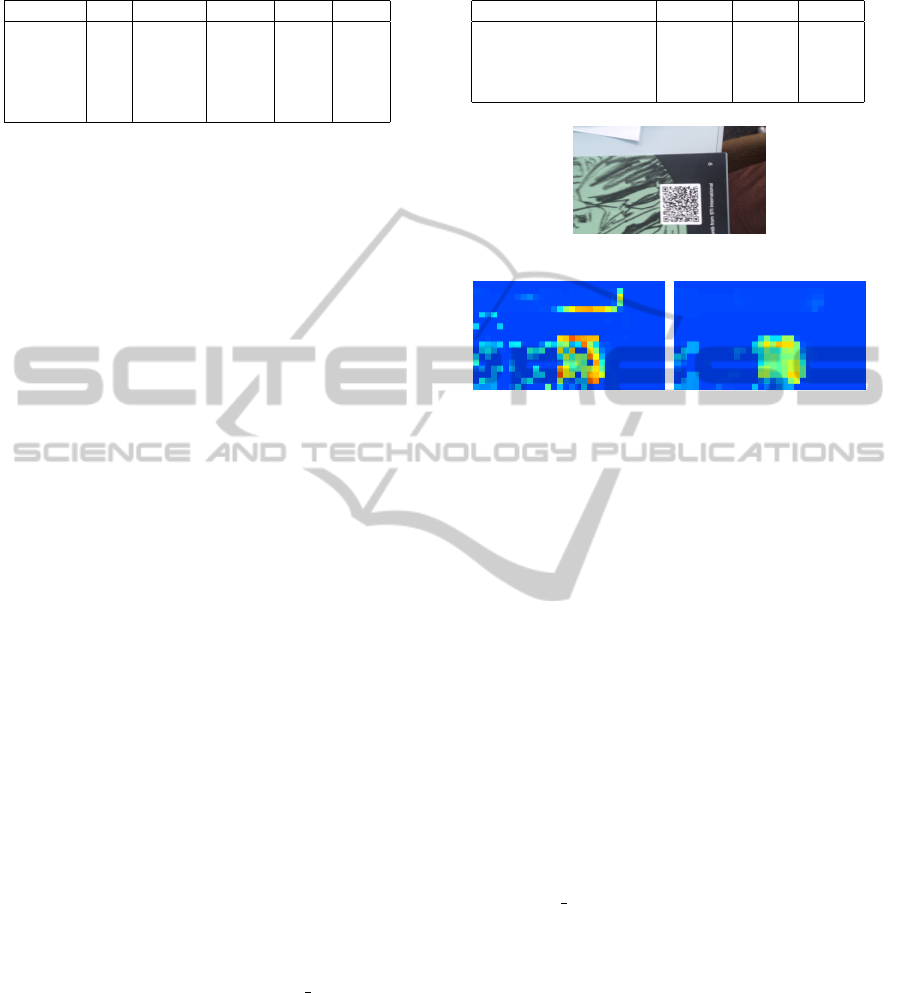
Table 3: FIS performance on different visual code types.
1D-S denote for stacked barcodes.
Type Dim. Block size Precision Hit rate F-score
QR 2D 50 px 0.9224 0.9353 0.9288
Aztec 2D 50 px 0.8738 0.9639 0.9167
Data matrix 2D 50 px 0.9214 0.9399 0.9305
Codablock 1D-S 20 px 0.7136 0.7287 0.7210
PDF417 1D-S 20 px 0.7277 0.7007 0.7140
bled four test sets containing Aztec codes and Data
matrix codes as two-dimensional, and Codablock
and PDF417 codes as stacked one-dimensional types.
Stacked 1D codes, like real 2D ones, embed informa-
tion along both axes. These synthetic examples are
built with computer-generated codes containing ran-
dom letters and numerals of the alphabet. The code
was placed on a negative image, with random rota-
tion. Gaussian smoothing and noise have been grad-
ually added to the images. The σ for the Gaussian
kernel was varied in the range [0,3]. A noise im-
age (I
n
) was generated with intensities ranging from
[-127, 127] following normal distribution, and added
gradually to the original 8-bit image (I
o
) as I = αI
n
+
(1 − α)I
o
, with α ranging [0, 0.5]. The noise was
added to the image using saturation arithmetic.
Results show that real 2D codes behave simi-
larly to QR codes, despite their structural differ-
ences (Table 3). One-dimensional stacked codes had
smaller height, therefore the block size has been set to
smaller, however, localization performance was infe-
rior to that for real 2D codes. This is probably due to
the fact that in real 2D codes row and column patterns
are similar while in stacked 1D codes they are quite
different. The input variables used for the FIS are ba-
sically direction-invariant and thus suit better for 2D
codes.
To compare efficiency of the proposed method to
other implementations from the state of the art, we
evaluated it on two public databases, from S
¨
or
¨
os et
al. (S
¨
or
¨
os and Fl
¨
orkemeier, 2013), and Dubsk
´
a et al.
(Dubsk
´
a et al., 2013), respectively.
S
¨
or
¨
os et al. made their set using 200 blurry images
acquired by iPhone5, without auto-focus. The evalu-
ation of the FIS on this set was performed with mi-
nor modifications of the original input terms based on
sample images of the set. The graydist avg attribute
had its perfect SMF term adjusted to SMF(0.25,0.5),
since images of this set had poor contrast due to the
heavy blur present. Mean intensity of the blocks
were also higher, so the Gaussian term representing
the perfect membership function has been modified
to G(m = 0.61, σ = 0.09). SMF term regarding satu-
ration could be set to SMF(0.075, 0.19), which led to
a stricter saturation rule than the one of our original
test set. Results in Table 4 show performance of the
Table 4: Results of the proposed method on the S
¨
or
¨
os et al.
and Dubsk
´
a et al. data sets.
Data set Precision Hit rate F-score
S
¨
or
¨
os et al. (Original FIS) 0.5938 0.5224 0.5558
S
¨
or
¨
os et al. (Median filtered) 0.5890 0.6018 0.5953
Dubsk
´
a et al. Set-1 0.6165 0.5036 0.5544
Dubsk
´
a et al. Set-2 0.9288 0.9513 0.9399
(a)
(b) (c)
Figure 7: Output stabilization of a sample image from the
S
¨
or
¨
os et al. set. (a) original image, (b) feature image, (c)
median filtered feature matrix.
FIS on this test set for the original algorithm, and one
with median filter as post-processing. Fig. 7 shows an
example of this data set with the corresponding fea-
ture images.
The second public database by Dubsk
´
a et al. con-
tained two similar sets of QR code images, sur-
rounded with text in a scene having low saturation
in general. The first set has 410 high-resolution
(2560 × 1440 px) images with uneven lighting con-
ditions, high grades of distortion and minor blur
(Fig. 8(a)). The second test set has 400 low-resolution
(604 × 402 px) images with smaller grades of distor-
tion and more even illumination, but having less light
in general, thus producing darker images (Fig. 8(c)).
For the first set of this database, FIS had to be set
for larger tolerances for the perfect term of blockavg,
and graydist avg was also set to lower acceptance
value, defined by SMF(0.25,0.3). However, images
of the first set have shown so high variability for the
mean intensities within blocks, contrast and QR code
size that the designed FIS could not be generalized
enough to classify all samples well. We can overcome
this issue using adaptive thresholding or local contrast
stretching, at the cost of more computation time. On
the second data set, with a chosen block size 50 px,
FIS terms of positive response could be tuned more
easily, therefore the proposed method performed bet-
ter with respect to both precition and hit rate (Table 4).
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
350

(a) (b)
(c) (d)
Figure 8: Examples of the Dubsk
´
a et al. Set-1 (a) and Set-
2 (c), and their feature images (b) and (d), respectively. In
both cases the block size was 60 px, but the size of the first
image is much higher than that of the second.
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
1 - Specificity
Sensitivity
Synthetic data
Real data
Figure 9: Efficiency of the proposed algorithm according to
different thresholds, visualized in ROC space.
3.1 Performance Measures of the Cell
Histogram Feature
Four variants of the histogram-based feature was
evaluated separately from the FIS, each named af-
ter the pattern they use for building the cell his-
tograms (HIST-FULL uses all pixels, HIST-CHK,
HIST-LIN and HIST-SPA uses the checkerboard, lin-
ear and sparse patterns, respectively), and compared
to the works of Ohbuchi et al. (Ohbuchi et al., 2004)
and Lin et al. (Lin and Lin, 2013).
The effect of chosen threshold T to efficiency, us-
ing HIST-FULL, is shown in Fig. 9. AUC for syn-
thetic and real data are 0.9924 and 0.8938, respec-
tively. Sensitivity drops below 1.0 at T = 0.73, and
F-measure peaks at T = 0.86. For industrial setups,
where localization of all codes is crucial, we recom-
mend T ≈ 0.8, since sensitivity is still 99 % and pre-
cision is about 50 %. The behavior for chosen thresh-
old and noise level is similar in all chosen patterns.
Fig. 10 shows that noise has no significant effect to
false positive rate, it only drops sensitivity at higher
rates. Detailed results are shown in Table 5 for syn-
thetic and real images of the database.
Table 5: Performance measures of the proposed algorithm
using different cell patterns, compared to other localization
approaches (Ohbuchi et al., 2004; Lin and Lin, 2013).
Synthetic images Precision Recall Accuracy
REF-OHBUCHI 1.0000 0.837 0.8730
REF-LIN 0.9340 0.9490 0.8890
HIST-FULL 0.8320 0.9382 0.9732
HIST-CHK 0.8576 0.9035 0.9737
HIST-LIN 0.6625 0.9389 0.9426
HIST-SPA 0.6729 0.9014 0.9429
Real images Precision Recall Accuracy
REF-OHBUCHI 0.9500 0.8750 0.8360
REF-LIN 0.9400 0.8930 0.8450
HIST-FULL 0.7672 0.9011 0.9630
HIST-CHK 0.7677 0.9016 0.9631
HIST-LIN 0.7662 0.9056 0.9632
HIST-SPA 0.7652 0.9005 0.9627
0.05 0.1 0.15 0.2 0.25
0
0.2
0.4
0.6
0.8
1
Noise level
Precision
Sensitiviy
F-measure
Figure 10: Precision, Sensitivity and F-measure according
to noise level, using 0.86 as threshold.
3.2 Using Partial Block Information
As in the case of histograms, the number of read pix-
els can be limited to speed up FIS processing. Fig. 11
shows results of the sparse data evaluation. The x
axis represents the sampling factor, which means that
only every n-th pixel is read from both the rows and
columns, so the amount of pixels used to calculate
the FIS input variables, is reduced by a factor of
n
2
. This partial block information does not introduce
more false positives, it only affects the hit rate by ren-
dering the only rule of positive response unreliable
in the FIS. Results also show that the chosen sam-
pling interferes with the unit size of the QR code. Hit
rate temporally rises while reading only every 10th,
12th and 15th pixel, since it gives a more reliable
block sampling for attribute computation, which is
caused by the cca. 6 px unit size of the used QR
codes in those images. Choosing the sampling factor
k · unitsize/2,(k ∈ Z) is more likely to sample most
QR code units from the same position, like close to
center of unit, or close to their perimeter. However,
we cannot make any assumptions on expected QR
unit size on arbitrarily acquired images, therefore us-
LocalizationofVisualCodesusingFuzzyInferenceSystem
351

0
0.2
0.4
0.6
0.8
1
0 2 4 6 8 10 12 14 16 18 20
precision
hit rate
Figure 11: Performance of the FIS on sparse data. Values
of the x axis mean that only every n-th pixel is read with
respect to rows and columns.
ing large sampling factor is considered unreliable in
general. Furthermore, chosen block size gives an up-
per limit to sampling, since calculation of the FIS in-
put attributes are based on statistics and therefore re-
quire tens of pixels for each block. In order to stabi-
lize the FIS output by region compactness, we could
take adjacent blocks into consideration. To avoid
large increase of computation time, evaluation of this
condition is recommended to be performed outside
the FIS, in the feature matrix. Small “holes” of the
matrix, values surrounded by blocks of high values,
are likely to be false negatives. Similarly, “lonely”
blocks of high value can be safely zeroed out, since
they probably do not participate in any QR code can-
didate. Morphological filtering, or as a simpler opera-
tion, median filtering are suitable for this task (Fig. 7).
In most cases, the latter seems sufficient according to
experimental results, however, using morphology at
this step is also acceptable, since the size of the fea-
ture matrix is only a small fraction of that of the orig-
inal input image.
4 CONCLUDING REMARKS
In this paper, we have shown that Fuzzy Inference
Systems can be used to rapidly localize QR codes in
the image domain. We have examined efficiency of
Fuzzy Inference Systems that has membership func-
tions created by preliminary assumptions based on
statistics of a few sample images of the expected sce-
nario. For industrial setups, making this assumption
is easy, since variability of the content is smaller. For
smartphone applications, parameters can be tuned us-
ing camera properties. Performance has been evalu-
ated on public test image sets.
Block size and amount of overlap has also been
evaluated, thus giving information about the robust-
ness of the approach. FIS can be replaced by lookup
tables that leads to constant-time evaluation. Calcu-
lation of the input features can be further accelerated
using approximations with only a subset of intensity
values. These properties can make FIS-based local-
ization a preferred choice over other algorithms.
The proposed algorithm can also be used to effi-
ciently localize other popular two-dimensional code
types as well, like Aztec codes or Data matrix codes,
without major modification.
ACKNOWLEDGEMENT
This publication is supported by the European Union
and co-funded by the European Social Fund. Project
title: Telemedicine-oriented research activities in
the fields of mathematics, informatics and medi-
cal sciences. Project number: T
´
AMOP-4.2.2.A-
11/1/KONV-2012-0073.
REFERENCES
Belussi, L. F. F. and Hirata, N. S. T. (2011). Fast QR code
detection in arbitrarily acquired images. In Graphics,
Patterns and Images (Sibgrapi), 2011 24th SIBGRAPI
Conference on, pages 281–288.
Bodn
´
ar, P. and Ny
´
ul, L. G. (2012). Improving barcode de-
tection with combination of simple detectors. In The
8th International Conference on Signal Image Tech-
nology (SITIS 2012), pages 300–306.
Bodn
´
ar, P. and Ny
´
ul, L. G. (2013). A novel method for
barcode localization in image domain. In Image Anal-
ysis and Recognition, volume 7950 of Lecture Notes
in Computer Science, pages 189–196.
Chu, C.-H., Yang, D.-N., Pan, Y.-L., and Chen, M.-S.
(2011). Stabilization and extraction of 2D barcodes
for camera phones. Multimedia Systems, 17:113–133.
Dubsk
´
a, M., Herout, A., and Havel, J. (2013). Real-time
precise detection of regular grids and matrix codes.
Journal of Real-Time Image Processing, pages 1–8.
Lin, D.-T. and Lin, C.-L. (2013). Automatic location
for multi-symbology and multiple 1D and 2D bar-
codes. Journal of Marine Science and Technology,
21(6):663–668.
Lindeberg, T. (1993). Scale-space theory in computer vi-
sion. Springer.
Ohbuchi, E., Hanaizumi, H., and Hock, L. A. (2004).
Barcode readers using the camera device in mobile
phones. In Cyberworlds, 2004 International Confer-
ence on, pages 260–265.
Rubner, Y., Tomasi, C., and Guibas, L. J. (2000). The earth
mover’s distance as a metric for image retrieval. Inter-
national Journal of Computer Vision, 40(2):99–121.
S
¨
or
¨
os, G. and Fl
¨
orkemeier, C. (2013). Blur-resistant joint
1D and 2D barcode localization for smartphones. In
Proceedings of the 12th International Conference on
Mobile and Ubiquitous Multimedia, MUM ’13, pages
11:1–11:8, New York, NY, USA. ACM.
Swain, M. J. and Ballard, D. H. (1991). Color indexing. Int.
J. Comput. Vision, 7(1):11–32.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
352
