
Good Practices on Hand Gestures Recognition for
the Design of Customized NUI
Damiano Malafronte and Nicoletta Noceti
DIBRIS, Universit`a degli Studi di Genova, via Dodecaneso 35, 16146, Genova, Italy
Keywords:
Natural User Interfaces, Gesture Recognition, Hand Pose Classification, Fingers Detection.
Abstract:
In this paper we consider the problem of recognizing dynamic human gestures in the context of human-
machine interaction. We are particularly interested to the so-called Natural User Interfaces, a new modality
based on a more natural and intuitive way of interacting with a digital device. In our work, a user can interact
with a system by performing a set of encoded hand gestures in front of a webcam. We designed a method that
first classifies hand poses guided by a finger detection procedure, and then recognizes known gestures with
a syntactic approach. To this purpose, we collected a sequence of hand poses over time, to build a linguistic
gesture description. The known gestures are formalized using a generative grammar. Then, at runtime, a
parser allows us to perform gesture recognition leveraging on the production rules of the grammar. As for
finger detection, we propose a new method which starts from a distance transform of the hand region and
iteratively scans such region according to the distance values moving from a fingertip to the hand palm. We
experimentally validated our approach, showing both the hand pose classification and gesture recognition
performances.
1 INTRODUCTION
In the last decades, the way people interact with dig-
ital devices has changed dramatically. From the era
of the Command Line Interfaces, introduced in mid-
1960s and used throughout the 1980s, users lived the
evolution of Graphical User Interfaces (GUI), that had
their key moment in the 1990s with the introduction
of the WIMP (Windows, Icons, Menus and Pointer)
paradigm.
In the last years, touch-based interaction systems have
gained more and more popularity, outshining old-
fashioned methods based on physical buttons. Now,
digital users are getting closer and closer to a new
revolution on human-machine interaction, character-
ized by a more natural and intuitivematching between
an action and the consequent event associated with it.
The term Natural User Interfaces (NUI) refers to all
those modalities of interaction where a user is asked
to use his own body to interact with the system. So,
a user might be required to tap or slide a finger on a
touch-sensitive screen, as well as to move a remote in
the air while standing, or again to use arms and hands
to perform dynamic gestures in front of a camera so
that the system can recognize them (see an example
of application in Fig. 1).
Figure 1: An example of photo browsing application which
relies on a natural user interface.
Rauterberg gave a really nice definition of NUI
(Rauterberg, 1999):
A system with a NUI supports the mix of real
and virtual objects. As input it recognizes
(visually, acoustically or with other sensors)
and understands physical objects and humans
acting in a natural way (e.g., speech input,
and writing, etc.). [...] Since human beings
manipulate objects in the physical world most
often and most naturally with hands, there is
a desire to apply these skills to user-system
360
Malafronte D. and Noceti N..
Good Practices on Hand Gestures Recognition for the Design of Customized NUI.
DOI: 10.5220/0005304203600367
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 360-367
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 2: A sketch of our procedure.
interaction. In fact, NUIs allow the user
to interact with real and virtual objects
on the working area in a –literally– direct
manipulative way.
In this context, we propose a dynamic gestures recog-
nition system with specific reference to applications
in which users can bind a different effect to each ges-
ture. So, our method may be instantiated to be the
basis of a photo browsing application, but it might
be also adopted in a context in which the user can
not physically interact with a device, as e.g. during
surgery to browse the patient clinical records.
Fig. 2 reports a visual representation of our
pipeline. We start from a video stream acquired from
a webcam and apply a well accepted video analysis
procedure, that combines appearance and motion in-
formation to localize the user hand and gather trajec-
tories of the hand position over time. At each time
instant, we classify the shape of the detected region to
understand the hand pose. We propose a new method
that couples a distance transform of the shape with
its convex hull, and that is based on a iterative proce-
dure aiming at detecting stretched fingers. This speci-
fication allows us to organize the actual classification
using multiple classifiers, one for each possible hand
configuration (one finger, two fingers, ...). A simple
KNN classifier is adopted to learn hand shape repre-
sentations, based on the Hu moments.
Moreover, starting from a sequence of hand poses
– or history – we propose an efficient modality of ges-
tures recognition which relies on the use of generative
grammars combined with the definition of an appro-
priate syntactic parser to semantically recognize the
gesture representation at runtime. Thank to this ap-
proach, not only known gestures can be efficiently
recognized, but also users can define new customized
movements in a very intuitive way. This is done by as-
signing a user-friendly linguistic signature to the new
gesture, which is then rendered with appropriate pro-
duction rules of the gesture grammar.
Related Works. In the past years the interest for
gesture-based interaction has grown more and more,
with a spread out of methods applied to a variety of
fields. A rather complete review may be found in
(Rautaray and Agrawal, 2012). Here we cite their use
for sign language recognition (Paulraj, 2008), virtual
and augmented reality (Choi et al., 2011), supporting
tools for impaired users (Zariffa and Steeves, 2011)
and robotics (Droeschel et al., 2011).
Previous approaches for finger detection (Sato
et al., 2000; Fang et al., 2007; Dardas and Georganas,
2011) often rely on the use of appropriate shape de-
scriptors. More related to our approach are previ-
ous works in which finger detection acts as a tool for
recognizing static gestures, where the notion of ges-
ture is blended in with the concept of hand pose. In
(Ghotkar and Kharate, 2013) the authors proposed a
method that starts from Kinect data and detects fin-
gers by scanning the hand contour. Classification is
fully based on the number of detected fingers, limit-
ing the number of allowed poses. Kinect is also used
in (Ren et al., 2013), where a part-based hand gesture
recognition is presented, based on the Finger-Earth
Mover’s Distance. Recently, in (Chen et al., 2014) it
is presented a real-time method based on segmenting
palm and fingers and adopting a rule classifier.
In our work, we decouple the problem of classi-
fying hand poses (static) from the hand gesture (that
may be dynamic) recognition task. Similarly to (Chen
et al., 2014), we do not require the final user to wear
gloves, nor need the video streams to be acquired with
refined sensors (as in (Ghotkar and Kharate, 2013)),
so to widen the range of potential users. Our approach
to fingers detection significantly differs from previous
works in that we fully rely on the distance transform,
whereas it is typically adopted as an intermediate step
towards the computation of the hand skeleton.
Finally, from the gesture recognition side, our
work is related to syntactic approaches. For instance,
high-level human activities have been recognized us-
ing context-free grammars (see e.g. (Bobick and Wil-
son, 1997; Ivanov and Bobick, 2000; Joo and Chel-
lappa, 2006)). Compared to them, in our work the
idea is that of keeping the model complexity under
control, so to allow users to easily personalize the
GoodPracticesonHandGesturesRecognitionfortheDesignofCustomizedNUI
361
gestures portfolio. This simplicity does not affect
the global strength of the system, since even humans
memory capability fails to cope with lexicons that are
too complex.
Structure of the Paper. The remainder of the pa-
per is organized as follows. In Sec. 2 we provide a
detailed description of our method for pose classifi-
cation, while gesture recognition is the main topic of
Sec. 3. We perform an experimental validation of our
method in Sec. 4, while Sec. 5 is left to a final discus-
sion.
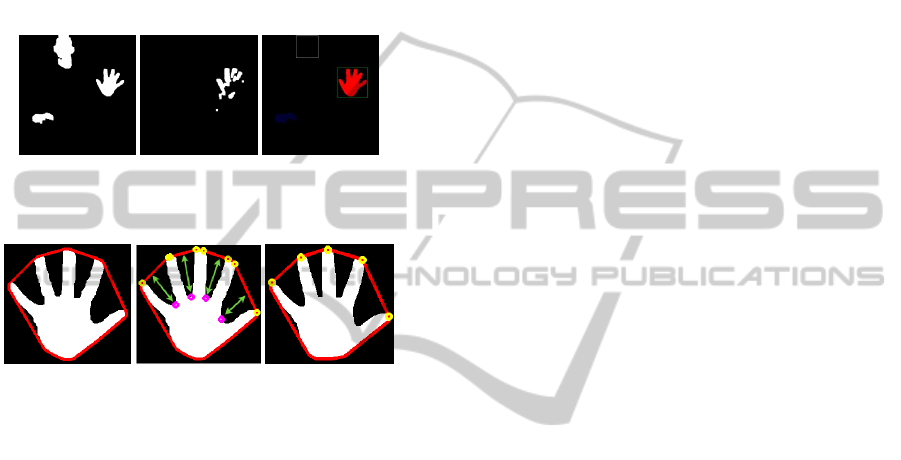
(a) Skin (b) Foreground (c) Moving
blob
Figure 3: Examples of output from the low-level analysis.
(a) Convex hull (b) Defects
points
(c) Fingertips
candidates
Figure 4: Output of the main pre-processing steps.
2 HAND POSE CLASSIFICATION
In this section we present our approach to the classifi-
cation of hand poses. We first analyse each image of
the sequence to understand the presence of a moving
hand (see Fig. 3). To this end, we start by segmenting
the image with a skin detection step, which according
to previous works (Singh et al., 2003) makes use of
the YCbCr color space. Simultaneously, we also per-
form background subtraction, based on an adaptive
mixture model (Zivkovic, 2004), to detect moving re-
gions. We intersect the two binary maps to obtain
moving regions corresponding to skin, and finally ap-
ply a face detection algorithm (Viola and Jones, 2001)
to discard skin regions not corresponding to the user
hand, which is finally detected.
At each time instant, the hand region undergoes
different processing steps:
Finger Detection. We propose a new method to de-
termine the presence of stretched fingers (see Sec.
2.2)
Hand Description. We describe the shape of the
hand region – i.e. a blob of the binary map – by means
of the Hu Moments (Hu, 1962), that are invariant to
changes of position, scale or orientation. Although
rather simple, they are very appropriate for a use in
the considered scenario, where both invariance and
computational efficiency are important properties.
Hand Pose Classification. The hand description
is classified to determine the hand pose with a
K-Nearest Neighbors (KNN) classifier (Dasarathy,
2002) with a distance computed as the sum of squared
differences. We consider a portfolio of 6 classifiers,
one for each plausible hand configuration (from 0 to 5
stretched fingers). The choice of the appropriate clas-
sifier is guided by the output of the finger detection.
2.1 Some Preliminaries
In this section we set the scene for the application of
the finger detection method we propose. We start by
determining the convex hull (Berg et al., 2008) of the
points lying in the hand region (Fig. 4(a)). With con-
vexity defects we refer to boundary points (purple in
Fig. 4(b)) characterized by a distance (green arrows)
from the corresponding contour segment (i.e. seg-
ments of the convex hull between two yellow points)
greater than a threshold ε, which we set proportional
to the blob area.
We go one step further with the computation of the
distance transform (Danielsson, 1980) of the hand re-
gion. Starting from a binary map, the method relies on
computing for each position inside the region the dis-
tance from the nearest boundary point (see Fig. 5(a)
and 6, third column) estimated following (Borgefors,
1986). The highest value of the distance provides an
estimate of the palm center (Fig. 6, bottom).
Information about convexity defects and distance
transform concurs to understand the presence of
stretched fingers, as clarified in the next section.
2.2 Fingers Detector
We propose here a new algorithm for fingers detec-
tion based on an effective scanning procedure that it-
eratively reasons on the distance transform.
Let CH be the convex hull of a hand region B, and
let D be the set of the defects points detected on B
with respect to CH. Each element DP
i
∈ D is associ-
ated with a set of information, i.e. (i) the actual image
point P
i
lying on the boundary of B (purple points in
Fig. 4(b)), (ii) two points (P
L
i
, P
R
i
) delimitating from
left and right the segment of the boundary of CH as-
sociated with P
i
(Fig. 4(b) in yellow), and (iii) the
distance d
i
of P
i
from the above mentioned segment
(green arrows in Fig. 4(b)).
All points P
L
i
and P
R
i
are candidates to be recog-
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
362

nized as fingertips. In presence of multiple detected
locations in a limited spatial range a single candi-
date point is considered, computed as the mid-pointof
the segment connecting the two candidates (see Fig.
4(c)).
Starting from each candidate, the distance trans-
form is iteratively analysed as follows (see a sketch in
Fig. 5).
(a) Dist. transform (b) Zoomed area (c) Displacement
(d) Next guess (e) Next area (f) Updated point
Figure 5: A visual sketch of our finger detector algorithm.
Figure 6: Examples of intermediate output of the finger de-
tection procedure. From the left: hand blob, convex hull
and candidates points, distance transform, detected fingers
and estimated palm center.
Figure 7: An example of detection failure, that might be
corrected by refining our procedure (see text).
We start by considering a spatial range around a
candidate of radius τ proportional to the hand palm
extent. Within this range we only consider points
belonging to the hand blob (in green in Fig. 5(b))
and compute their average position weighted accord-
ing to the distance transform (DT). More formally, if
P
0
i
= [x
i
, y
i
] is the candidate point and P = [x, y] is a
point lying in the hand blob B within a distance τ from
P
0
i
we compute
P
1
i
= [x
1
i
, y
1
i
] =
1
N
∑
x,y
DT(x, y) · P. (1)
Fig. 5(c) shows an example where the estimated aver-
age point is denoted in black. Intuitively, the weighted
average allows us to movefrom the candidate towards
the direction of higher distance, thus following a path
which is situated in the middle of the finger. The pro-
cedure is then iterated as follows. Let P
n
i
be the last
weighted average, then:
1. If P
n
i
is within the palm radius, the procedure is
stopped.
2. Otherwise, we consider the displacement between
P
n−1
i
and P
n
i
, apply it to P
n
i
and so obtain an initial
guess
ˆ
P
n+1
i
(Fig. 5(d)).
3. We consider a spatial range around our guess with
a radius τ (Fig. 5(e)) and estimate the next point
P
n+1
i
using Eq. 1 where we replace P
1
i
with P
n+1
i
(Fig. 5(f)).
4. Return to point 1, with n = n+ 1.
Fig. 6 (last column) reports examples of our output.
To reduce the amount of detection failures (as the one
reported in Fig. 7) we also consider a second thresh-
old τ
′
, initially set to τ and then fixed to twice the
current displacement, that we use to define a range in
which we estimate the area of the hand blob overlap-
ping with it (i.e. the extent of the green area in Fig.
5(b)). This is to the purpose of estimating the finger
size, so to avoid anomalous detections. Consider the
example in Fig. 7: without this further step of anal-
ysis, the part of the blob corresponding to the four
connected fingers would be incorrectly classified as a
single finger.
3 GESTURE RECOGNITION
Thanks to the algorithm introduced in the previous
section we can predict a label describing the hand
pose whenever we observe in the image a moving
region with all the appropriate characteristics. Sup-
ported by the tracking algorithm, we are also able
to segment sequences of temporally adjacent hand
shapes, representing the evolution of the hand appear-
ance during the dynamic event.
We start from here to define our method for rec-
ognizing gestures. Let us define as history of a blob a
sequence H = [h
t
1
h
t
2
. . . h
t
N
] of observations, each one
including different descriptions of the blob instance.
More specifically h
t
i
= (t
i
, P
i
, A
i
, L
i
), where t
i
is the
time instant of the observation, P
i
is the position of the
GoodPracticesonHandGesturesRecognitionfortheDesignofCustomizedNUI
363

blob centroid in the image plane, A
i
is the blob area,
while L
i
is the pose label associated with the blob in
case it has been classified as instance of one known
hand poses, a special value otherwise.
Starting from the history, each gesture is com-
pactly represented using a linguistic description as
Gesture = {
Start Pose
,
Final Pose
,
Area Var
,
Pos Var
,
Turns
}
where
•
Start Pose
and
Final Pose
are identifiers of
known poses, but may be also Any, when all poses
are allowed, or Same (as final pose) when the
same hand shape characterizes the whole gesture.
•
Area Var
∈ {Incr, Decr, Same} indicates the
variations of the blob extent across the history (it
may increase, decrease or remain stable)
•
Pos Var
∈ {Diff, Same} describes the variation
between the initial and final positions of the his-
tory, which may change or not.
•
Turns
∈ {Yes, No,} specifies the presence of
changes in the motion direction.
We define the known gestures G as a set of for-
mal representations generated by a grammar G, or, in
other words, a subset of the language generated by G:
G ⊂ L(G).
A formal generative grammar G, which we define
according to (Chomsky, 1956), is determined by a tu-
ple < N, Σ, s, P >, where N is a set of non-terminal
symbols (disjoint from from G), Σ is a set of terminal
symbols (disjoint from N), s ∈ N is the start symbol,
while P is a set of production rules.
In order to evaluate the pertinence of a history with
one of the known gestures we try and match the anno-
tated characteristics with the observed one by defining
a syntactic parser, tailored for a set of gestures known
to the system, able to associate a semantic meaning
(if any) to a formal representation. Should one anno-
tated gesture match the sequence of the history, the
recognition is accomplished.
The customization of the system is favored by
this intuitive representation, in which the user is only
asked to specify a set of well defined information
characterizing the gesture. The parser, then, is up-
dated to enroll the rules associated with the new ges-
tures.
Table 1: Comparison of the classification accuracies with-
out and with finger detector.
Method Mean Acc. (%)
K=1, without finger detection 92.7
K=1, with finger detection 99.4
K=3, with finger detection 99.8
Table 2: Comparison with other approaches to finger detec-
tion.
Method Mean Acc. (%)
Th. Dec.+FEMD 93.2
Near-Con. Dec.+FEMD 93.9
Our approach 94.5
Table 3: Comparison of pose classification accuracies.
Method Acc. (%) Time (s)
Shape context (no bending cost) 83.2 12.346
Shape context 79.1 26.777
Skeleton Matching 78.6 2.4449
Near-convex Dec.+FEMD 93.9 4.0012
Thresholding Dec.+FEMD 93.2 0.075
Our approach 90.5 0.0009
4 EXPERIMENTS
In this section we present the experimental validation
of the approach we propose.
Some clarifications on the choice of the method
parameters are in order. The thresholds used during
the skin detection phase are determined with a brief
training phase in which the user is asked to put his fist
in front of the camera. As for the background subtrac-
tion, we experimentally fixed the size of the temporal
window to be of 30 frames (at 25f ps).
The threshold ε used to detect the convexity de-
fects was set to the 45% of the blob area. The ra-
dius τ of the spatial range used for detecting fingers
was fixed to 25% of the radius of the hand palm (i.e.
the distance between the palm center and the nearest
boundary point).
All the experiments were run on laptop computer
equipped with a Intel i7-2670QM 2.20 GHz CPU and
8 GB RAM.
4.1 Evaluation of the Finger Detector
for Pose Classification
We evaluated the robustness of our method consider-
ing a selection of 8 possible hand poses, depicted on
Fig. 8 (in brackets we report the identifiers we will
use henceforth): One (1), Two (2), Three (3), Four
(5), Five (5), Punch (Pu), Palm (Pa), Palm and Thumb
(PT). We collected a dataset composed by hand poses
gathered from four different subjects. For each sub-
ject, around 50-60 samples have been acquired. The
performance of our finger detector are very close to
be perfect, with an average accuracy of 99.7%.
To perform pose classification, we followed a
Leave-One-Person-Out approach, replicating the ex-
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
364
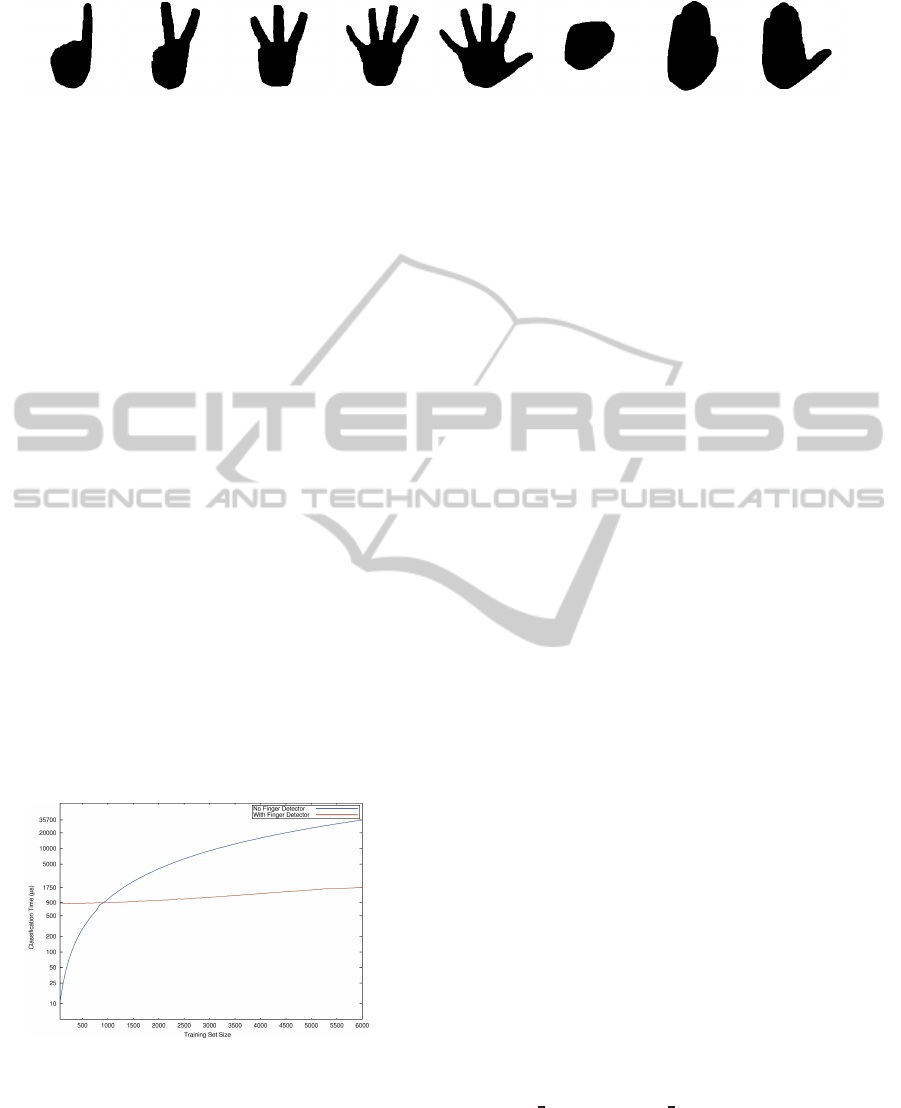
(a) one (1) (b) two (2) (c) three (3) (d) four (4) (e) five (5) (f) punch
(Pu)
(g) palm (Pa) (h) palm and
thumb (PT)
Figure 8: Samples of the 8 poses known to the system (in the brackets we report abbreviations used in the text).
periment by using observations from 3 subjects to
gather the training set (on which we performed model
selection), while keeping one subject out for testing.
We compare the accuracies of a multi-class K-NN
classifier that considers all the allowed poses, withour
proposed method, in which classification is guided by
the finger detector. In both cases, we selected the best
number K of nearest neighbors on the training set and
then reported the performances on the test set, averag-
ing with respect to the 4 possible configurations. The
comparison is reported in Tab. 1. Without finger de-
tection, the best result on the training set is achieved
with K=1, while in presence of the detection K is best
set to 3. For a fair comparison, we also report the
result of the combination of finger detector and clas-
sifier with K=1. The results clearly speak in favor of
our approach.
Even from a computational standpoint we may ap-
preciate the benefit of using the step of finger detec-
tion to guide the selection of an appropriate classifier.
As shown in Fig.9, as the dimensionality of the train-
ing set grows (we simulate the use of growing training
sets by replicating the data so to allow more compar-
isons), it substantially reduces the amount of compar-
isons among the available data, keeping the temporal
complexity under control.
Figure 9: Comparisons of the computational time without
and with finger detection as the size of training set grows.
To favor the comparison with related works, we
also evaluated our approach on a publicly available
dataset (http://eeeweba.ntu.edu.sg/computervision/
people/home/renzhou/HandGesture.htm), collected
from 10 subjects while performing 10 hand poses.
The dataset has been adopted in (Ren et al., 2013),
where a part-based hand gesture recognition method
has been proposed, based on the use of kinect data
to segment the hand region. In such an approach
each hand pose is actually interpreted as a static
gesture. We started by detecting the hand region
combining RGB data with depth information (after
having aligned the two) ending up with sometimes
very noisy segmentations. We decoupled here the
problems of detecting fingers from the actual pose
classification, thus we first ran our finger detector
and compare in Tab. 2 our performances with what
reported in (Ren et al., 2013). Since in the paper
only the final results for pose classification have
been specified, we simply computed the overall
accuracy of groups of poses characterized by the
same number of stretched fingers. As noticed, our
method performs better. We also consider the full
hand pose classification problem, reporting in Tab. 3
the comparisons with other approaches in terms of
mean accuracy and mean running time. Results of
shape context (Belongie et al., 2002) and skeleton
matching (Bai and Latecki, 2008) are extracted from
(Ren et al., 2013). As it can be noticed, our results are
in line, even thought slightly below, with (Ren et al.,
2013). Also our method performs far better in terms
of average running time (900µs). Although we report
for completeness the full table of comparisons, our
approach should be more fairly compared to other
methods purely based on instantaneous shape rep-
resentation and matching (as (Belongie et al., 2002;
Bai and Latecki, 2008)). With respect to them, our
approach shows considerably higher performances.
4.2 Experiments on Gesture
Recognition
We now report the experimental analysis to validate
the gesture recognition procedure. Following the
nomenclature adopted in Sec. 3, the values allowed
for
Start Pose
ad
Final Pose
fields in the gesture
signature are to be selected from the set of poses in-
cluded in the dataset we collected in-house, i.e. { 1,
2, 3, 4, 5, Pa, Pu, PT, Any, Same }.
Fig. 10 shows visual representations of the
gestures we consider in this experimental analysis,
whose linguistic representations are the following:
GoodPracticesonHandGesturesRecognitionfortheDesignofCustomizedNUI
365
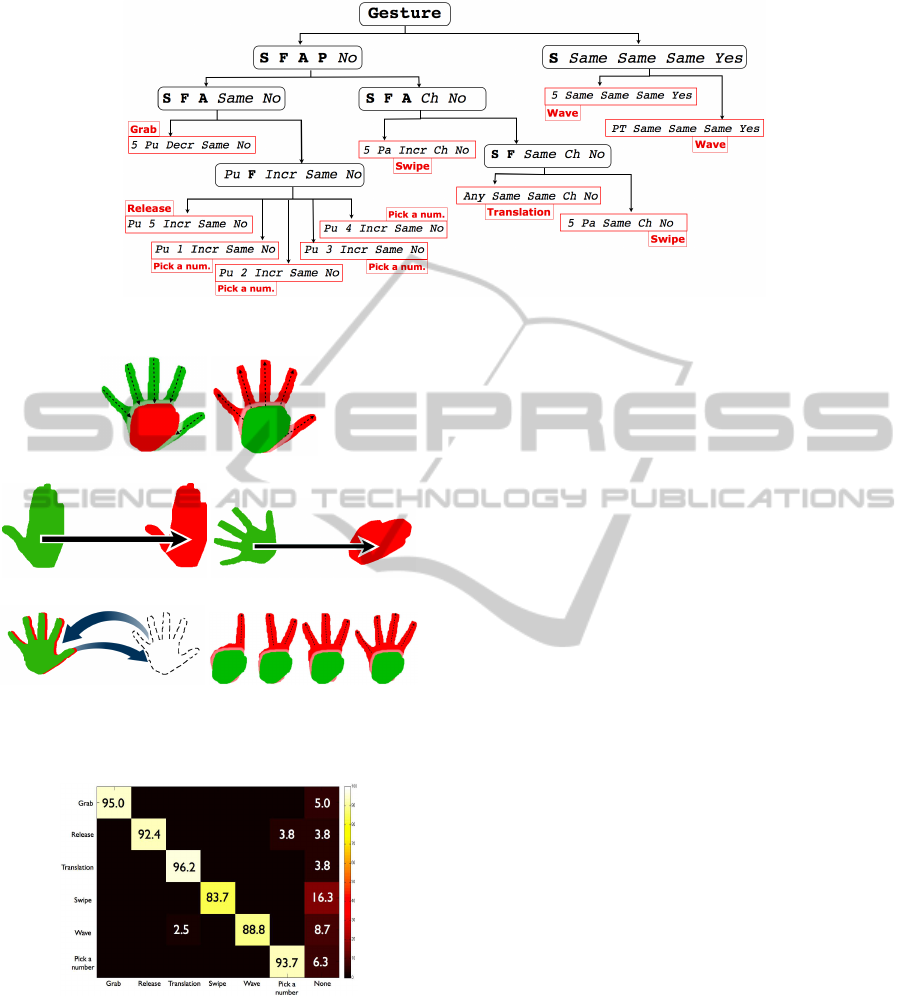
Figure 12: A visual representation of the syntactic parser recognizing the gestures representations we consider.
(a) Grab (b) Release
(c) Translation (d) Swipe
(e) Wave (f) Pick a number
Figure 10: A visual representation of the considered ges-
tures (starting pose is green, final pose in red).
Figure 11: Accuracy (%) of gesture recognition (91.6 on
average).
Grab 5 Pu Decr Same No
Release Pu 5 Incr Same No
Translation Any Same Same Ch No
Swipe 5 Pa Same|Incr Ch No
Wave 5 | PT Same Same Same Yes
Pick a number Pu 1|2|3|4 Incr Same No
A formal grammar G generating the ges-
ture representations G may be the following:
s ::= Gesture
N ::= Gesture| SFAP| SFA| SF | S
Σ ::= 1 | 2 | 3 | 4 | 5 | Pu |Pa
PT | Same | Any | Ch | Yes | No
P ::=
Gesture → SFAP No | S Same Same Same Yes
SFAP → SFA Same | SFACh
SFA → 5 Pa Incr | SF Same |
5 Pu Decr | Pu F Incr
SF → Any Same | 5 Pa
S → 5 | PT
F → 1 | 2 | 3 | 4 | 5
Now, the gestures G ⊂ L(G) are identified by the
parser we report in a graph-like fashion in Fig. 12
We collected videos of 4 subjects performing 20
replicates of each gesture. To take into account the
variability of the dynamic events, subjects were asked
to apply some variation to the movements, e.g. chang-
ing the direction or the adopted hand. Also, we ac-
quired the videos in two different indoor environ-
ments (a living room and a classroom), to account for
contextual variations (light changes, background vari-
ability, ...).
Fig. 11 reports the overall confusion matrix. The
method is proved to be very robust to the variability
among the users movements, even if a few failures
havebeen experienced – as in particular for swipe ges-
tures. Not surprisingly, it is the less constrained ges-
ture, thus it is more likely it deviates with respect to
the annotation, especially when the user is not enough
familiar with the system.
5 CONCLUSIONS
This paper considered the problem of recognizing
static and dynamic human gestures, with particular
reference to the use for designing Natural User In-
terfaces. Moving regions extracted from image se-
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
366

quences acquired with a webcam are first processed
to detect the presence of stretched fingers with a new
method based on iteratively analysing the distance
transform of the hand region. The result guides the
classification of a set of known hand poses, which is
based on a family of classifiers related to the hand
configuration. Gesture recognition is
achievedusing a syntactic approach making use of
linguistic gestures annotation formalized with a gen-
erative grammar.
We experimentally validated our method and
showed how it compares favorably with other ap-
proaches, while performing significantly better from
a computational standpoint.
As a first prototypical application, we developed a
picture browsing (see a screenshot in Fig. 1) in which
all the available functions are enabled by only the use
of hands.
Future improvements will be devoted to attenuate
the constraints required by the system (e.g. to over-
come problems for detecting hands). A straightfor-
ward development refers to extending the system so
to enroll two-handed gestures. From the standpoint
of the computational tools, the K-NN classifier can
be replaced with more refined machine learning meth-
ods, that may be beneficial especially as the number
of known hand poses increases. Also, users evalua-
tions will be taken into account to judge the ease in
the use of the interface. These aspects are object of
current investigations.
REFERENCES
Bai, X. and Latecki, L. (2008). Path similarity skeleton
graph matching. Trans. on PAMI, 30(7):1282–1292.
Belongie, S., Malik, J., and Puzicha, J. (2002). Shape
matching and object recognition using shape contexts.
Trans. on PAMI, 24(4):509–522.
Berg, M. d., Cheong, O., Kreveld, M. v., and Overmars,
M. (2008). Computational Geometry: Algorithms and
Applications.
Bobick, A. F. and Wilson, A. D. (1997). A state-based ap-
proach to the representation and recognition of ges-
ture. Trans. on PAMI, 19:1325–1337.
Borgefors, G. (1986). Distance transformations in digi-
tal images. Comput. Vision Graph. Image Process.,
34(3):344–371.
Chen, Z., Kim, J., Liang, J., Zhang, J., and Yuan, Y. (2014).
Real-Time Hand Gesture Recognition Using Finger
Segmentation. The Scientific World Journal.
Choi, J., Park, H., and Park, J. (2011). Hand shape recog-
nition using distance transform and shape decomposi-
tion. In ICIP, pages 3605–3608.
Chomsky, N. (1956). Three models for the description of
language. Trans. on Information Theory, 2:113–124.
Danielsson, P. (1980). Euclidean distance mapping. In
Comp. Graph. and Image Proc., pages 227–248.
Dardas, N. and Georganas, N. D. (2011). Real-
time hand gesture detection and recognition using
bag-of-features and support vector machine tech-
niques. Trans. on Instrumentation and Measurement,
60(11):3592–3607.
Dasarathy, B. V. (2002). Handbook of data mining and
knowledge discovery. chapter Data Mining Tasks
and Methods: Classification: Nearest-neighbor Ap-
proaches, pages 288–298.
Droeschel, D., Stuckler, J., and Behnke, S. (2011). Learn-
ing to interpret pointing gestures with a time-of-flight
camera. In Int. Conf. on HRI, pages 481–488.
Fang, Y., Wang, K., Cheng, J., and Lu, H. (2007). A real-
time hand gesture recognition method. In Int. Conf.
on Multimedia and Expo, pages 995–998.
Ghotkar, A. S. and Kharate, G. K. (2013). Vision based real
time hand gesture recognition techniques for human
computer interaction. Int. Jour. of Computer Applica-
tions, 70(16):1–8.
Hu, M.-K. (1962). Visual pattern recognition by moment
invariants. Trans. on Inf. Theory, 8(2):179–187.
Ivanov, Y. A. and Bobick, A. F. (2000). Recognition of
visual activities and interactions by stochastic parsing.
Trans. on PAMI, 22(8):852–872.
Joo, S.-W. and Chellappa, R. (2006). Attribute grammar-
based event recognition and anomaly detection. In
CVPRW, pages 107–107.
Paulraj, Y. e. a. (2008). Extraction of head and hand ges-
ture features for recognition of sign language. In Inter.
Conf. on Electronic Design.
Rautaray, S. and Agrawal, A. (2012). Vision based hand
gesture recognition for human computer interaction:
a survey. Artificial Intelligence Review, pages 1–54.
Rauterberg, M. (1999). From gesture to action: Natural user
interfaces.
Ren, Z., Yuan, J., Meng, J., and Zhang, Z. (2013). Robust
part-based hand gesture recognition using kinect sen-
sor. Trans. on Multimedia, 15(5):1110–1120.
Sato, Y., Kobayashi, Y., and Koike, H. (2000). Fast track-
ing of hands and fingertips in infrared images for aug-
mented desk interface. In Int. Conf. on Automatic Face
and Gesture Recognition, pages 462–467.
Singh, S. K., Chauhan, D. S., Vatsa, M., and Singh, R.
(2003). A robust skin color based face detection al-
gorithm, tamkang. Jour. of Science and Engineering,
6:227–234.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In CVPR,
volume 1, pages I–511–I–518.
Zariffa, J. and Steeves, J. (2011). Computer vision-based
classification of hand grip variations in neurorehabili-
tation. In ICORR, pages 1–4.
Zivkovic, Z. (2004). Improved adaptive gaussian mixture
model for background subtraction. In ICPR, volume 2,
pages 28–31.
GoodPracticesonHandGesturesRecognitionfortheDesignofCustomizedNUI
367
