
Analyzing the Effect of Lossy Compression on Particle Traces in
Turbulent Vector Fields
Marc Treib, Kai B
¨
urger, Jun Wu and R
¨
udiger Westermann
Technische Universit
¨
at M
¨
unchen, Munich, Germany
Keywords:
Vector Fields, Turbulence, Particle Tracing, Data Compression, Data Streaming.
Abstract:
We shed light on the accuracy of particle trajectories in turbulent vector fields when lossy data compression is
used. So far, data compression has been considered rather hesitantly due to supposed accuracy issues. Moti-
vated by the observation that particle traces are always afflicted with inaccuracy, we quantitatively analyze the
additional inaccuracies caused by lossy compression. In some experiments we confirm that the compression
has only minor impact on the accuracy of the trajectories. Even though our experiments are not generally valid,
they indicate that a more thorough analysis of the error in particle integration due to compression is necessary,
and that in some cases lossy compression is valid and can significantly reduce performance limitations due to
memory and communication bandwidth.
1 INTRODUCTION
One of the most intriguing and yet to be fully under-
stood aspects in turbulence research is the statistics of
Lagrangian fluid particles transported by a fully de-
veloped turbulent flow. Here, a fluid particle is con-
sidered a point moving with the local velocity of the
fluid continuum. The analysis of Lagrangian statis-
tics is usually performed numerically by following the
time trajectories of fluid particles in numerically sim-
ulated turbulent fields. Let x(y, t) and u(y, t) denote
the position and velocity at time t of a fluid particle
originating at position y at time t = 0. The equation
of motion of the particle is
∂x(y, t)
∂t
= u(y, t),
subject to the initial condition
x(y, 0) = y.
The Lagrangian velocity u(y, t) is related to the Eule-
rian velocity u
+
(y, t) via u(y, t) = u
+
(x(y, t), t). By
using a numerical integration scheme, the trajectory
of a particle released into the flow can now be ap-
proximated.
Particle tracing in discrete velocity fields of a suf-
ficient spatial and temporal resolution to resolve the
higher wavenumber components in turbulent flows is
nonetheless difficult. For reasonably-sized particle
ensembles, due to the massive amount of data to be
accessed during particle tracing, the performance is
limited by the available memory bandwidth capac-
ities. Consequently, an effective performance im-
provement can be expected from data compression
schemes which can read and decompress the data at
significantly higher speed than reading the uncom-
pressed data. We make use of a brick-based com-
pression layer fulfilling this requirement (Treib et al.,
2012), yet we adapt it to support locally adaptive error
control.
Since in particle tracing the interpolation errors
accumulate and are transmitted to the calculated tra-
jectories, we analyze—compared to the established
interpolation scheme on the uncompressed data—the
inaccuracies in the computed trajectories, which are
caused by lossy compression.
Intuitively one might argue that lossy compres-
sion should not be considered, because it introduces
an additional, non-acceptable error into particle trac-
ing. On the other hand, in our application study the
vector fields were simulated using a spectral method,
meaning that the data values are a discrete sam-
pling of a band-limited smooth function. Therefore,
a ground truth interpolation exists—namely trigono-
metric interpolation—yet it is never used due to its
high numerical complexity. Nevertheless it is clear
that the established interpolation scheme already in-
troduces an error, even though this error is generally
accepted. As our major contribution we show that the
additional inaccuracies caused by lossy data compres-
279
Treib M., Bürger K., Wu J. and Westermann R..
Analyzing the Effect of Lossy Compression on Particle Traces in Turbulent Vector Fields.
DOI: 10.5220/0005307202790288
In Proceedings of the 6th International Conference on Information Visualization Theory and Applications (IVAPP-2015), pages 279-288
ISBN: 978-989-758-088-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

sion are in the same regions of variation in which the
trajectories in the uncompressed field differ from the
assumed ground truth trajectories. For the particular
application this means that the trajectories extracted
from the compressed data are as reliable as the trajec-
tories usually used for analyzing the turbulence fields.
We focus on the analysis of the (spatial) interpola-
tion error, because it is well known that interpolation
is the major source of errors in numerical particle trac-
ing in fully resolved turbulent flow fields. This is due
to the fact that turbulent velocity fields are highly non-
linear. Since the time-step in turbulence simulations
is commonly restricted to small values to enforce the
Courant number stability condition, the time-stepping
error in numerical integration is generally much less
significant.
We use two vector-valued data sets describ-
ing turbulent flow fields to verify our approach.
These data sets are the result of terascale turbu-
lence simulations and originate from the JHU turbu-
lence database cluster, which is publicly accessible at
http://turbulence.pha.jhu.edu. Each is comprised of
one thousand time steps of size 1024
3
, making ev-
ery time step as large as 12 GB (3 floating-point val-
ues per velocity sample). The data sets contain di-
rect numerical simulations of magneto-hydrodynamic
(MHD) turbulence and forced isotropic turbulence,
and are called “MHD” and “Iso” in the following. For
a description of the simulation methods used to com-
pute these data sets let us refer to (Li et al., 2008).
2 RELATED WORK
We do not attempt here to survey the vast body
of literature related to flow visualization approaches
based on stream and path line integration because they
are standard in flow visualization. For a thorough
overview, however, let us refer to the reports by (Post
et al., 2003), (Laramee et al., 2004), and (McLoughlin
et al., 2010).
(Teitzel et al., 1997) put special emphasis on the
investigation of the numerical integration error and
the error introduced by interpolation. They conclude
that an RK3(2) integration scheme provides suffi-
cient accuracy compared to linear interpolation, but
they do not consider higher-order interpolation meth-
ods. There is also a number of works dealing espe-
cially with accuracy issues of particle tracing in turbu-
lence fields (Yeung and Pope, 1988; Balachandar and
Maxey, 1989; Rovelstad et al., 1994). One of the con-
clusions was that Lagrange interpolation of order 4 to
6 provides sufficient accuracy, and it is therefore the
established scheme in practice (cf. (Li et al., 2008)).
An important topic related to our method is data
compression using transform coding. For a general
overview of data compression techniques we refer to
the book by (Sayood, 2005). The recent survey by
(Balsa Rodriguez et al., 2013) provides a more fo-
cused treatment of techniques used in the context of
volume visualization. Our GPU compression scheme
builds upon previous work for performing wavelet-
based vector field compression including Huffman
and run-length decoding entirely on the GPU (Treib
et al., 2012).
In previous work it has also been proposed to pre-
compute and store particle trajectories for a number
of prescribed seed points, and to restrict the visual-
ization to subsets of these trajectories (Lane, 1994;
Bruckschen et al., 2001; Ellsworth et al., 2004). In
this way, all computation is shifted to the preprocess-
ing stage, and storage as well as bandwidth limita-
tions at runtime can be overcome. Conceptually, this
approach can be seen as a kind of lossy data compres-
sion, where the seeding positions are quantized rather
than the flow data itself.
Another possibility to overcome memory band-
width limitations in particle tracing is to employ par-
allel computing architectures such as tightly coupled
CPU clusters or supercomputers, providing larger
memory capacities and I/O bandwidth. The two
principal parallelization strategies for particle tracing
are parallelize-over-seeds (PoS) and parallelize-over-
blocks (PoB) (cf. (Pugmire et al., 2009)). In both
strategies, the data set is partitioned into blocks, yet
in PoS each processor dynamically loads those blocks
required to trace the particles assigned to it, while in
PoB the blocks are distributed across the processors
and each only handles particles within its assigned
blocks. Especially PoS can effectively take advantage
of data compression for per-block node-to-node com-
munication. A number of approaches have been pre-
sented to further improve PoS and PoB (Camp et al.,
2011; Nouanesengsy et al., 2011; Peterka et al., 2011;
Yu et al., 2007).
As reported e.g. in (Camp et al., 2011), particle
tracing on compute clusters typically spends only a
small fraction of the total time on the computation
of particle traces. In many approaches, most of the
time is spent on either node-to-node communication
or memory I/O. It can be concluded that despite the
used architecture there is a dire need for data com-
pressions to increase the performance of particle trac-
ing.
IVAPP2015-InternationalConferenceonInformationVisualizationTheoryandApplications
280
3 TURBULENT VECTOR FIELD
COMPRESSION
Without data compression, the performance of parti-
cle tracing in large turbulence fields is vastly limited
by disk I/O throughput. For instance, the computa-
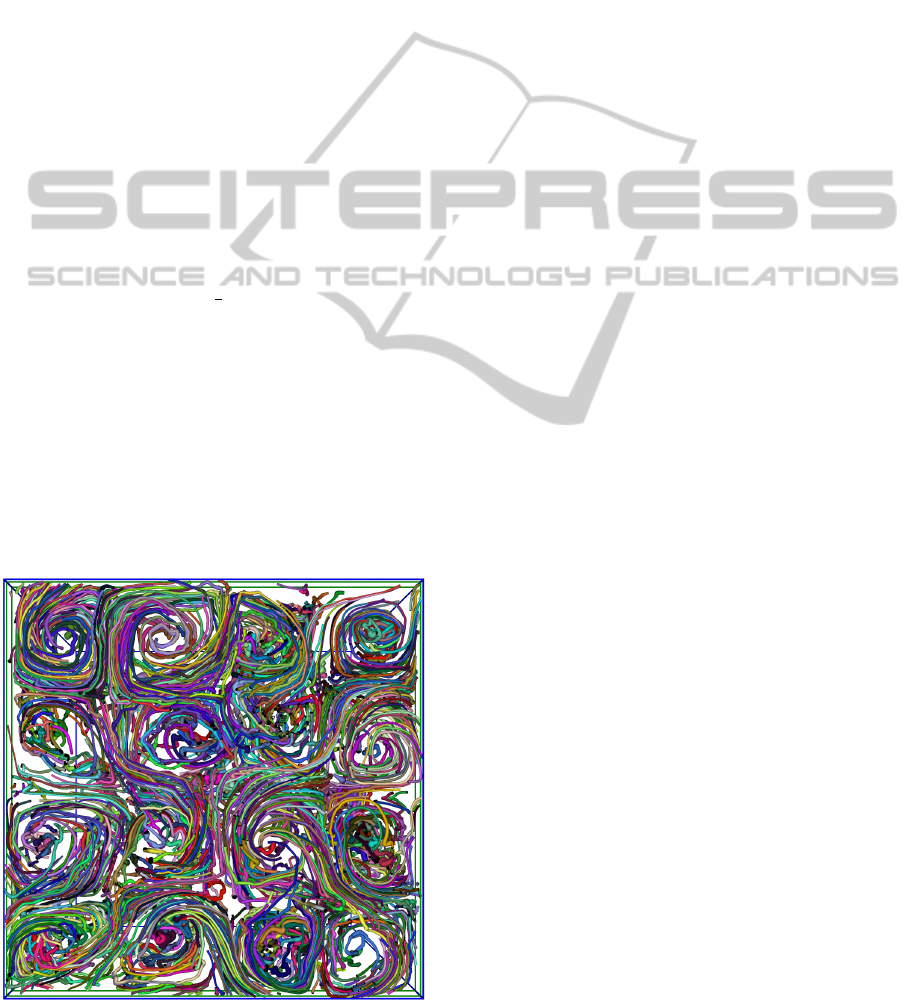
tion of stream lines as shown in Fig. 1 in one single
uncompressed time step involves a working set of al-
most 5 GB. Stream line integration takes roughly 45
seconds on our target architecture, of which over 98%
are spent waiting for data from disk. Tracing the parti-
cles once the data is available takes only 1.2 seconds.
By using our proposed compression scheme, stream
lines can be extracted in less than 5 seconds, includ-
ing disk I/O.
To avoid any additional error when using data
compression, lossless compression schemes can be
used in principle. However, for floating-point data—
which is the internal format in which velocities are
stored—the compression rate is usually quite mod-
est. The lossless schemes proposed in (Isenburg et al.,
2005; Lindstrom and Isenburg, 2006) compress the
turbulence data to roughly
2
3
of its original size. A de-
coding throughput of about 10 million floating point
values per second is achieved, corresponding to over
600 ms for the decompression of a single 128
3
grid of
3D velocities. More sophisticated prediction schemes
can slightly improve the compression rate (Fout and
Ma, 2012), yet they come at lower throughput.
On the contrary, in (Treib et al., 2012) a lossy GPU
compression scheme for vector data was shown to op-
erate significantly above disk speed. The scheme is
based on the discrete wavelet transform, followed by
a quantization of wavelet coefficients and a final en-
Figure 1: Stream lines in (uncompressed) MHD (1024
3
).
tropy coding of quantized coefficients. A decoding
throughput of over 650 million floating-point values
per second was achieved, at 3 bits per velocity vector
and a signal to noise ratio above 45 db.
3.1 Interpolation Error Estimate
When a lossy scheme for vector field compression is
used, the reconstructed field is afflicted with some er-
ror compared to the initial field. At first, this seems to
preclude lossy compression schemes in particle trac-
ing, because the local reconstruction errors accumu-
late along the particle trajectories. On the other hand,
this error has to be seen in relation to the error that is
inherent to particle trajectories even when computed
in the original data.
Even without compression the reconstructed sam-
ples are not exact in general, due to the interpola-
tion which is used to reconstruct the data values from
the initially given discrete set of samples. This inter-
polation makes assumptions on the continuous field
which, in general, do not hold. As a consequence, it
has to be accepted that the trajectories we compute
numerically using interpolation diverge from those
we would see in reality, even without compression.
It therefore makes sense to choose a compression
quality so that the additional error introduced by the
compression scheme is in the order of the error intro-
duced by interpolation. It is worth noting, however,
that without additional information about a data set
it is impossible to accurately compute or even esti-
mate the interpolation error. In some cases, theoret-
ical error bounds depending on higher-order deriva-
tives of the continuous function can be given; see,
for instance, (Fout and Ma, 2013) for such a bound
when linear interpolation is used. On the other hand,
the derivatives of the continuous function are typi-
cally not known exactly. In that case, such bounds
themselves come with some uncertainty. In addition,
even with exact knowledge of the derivatives, they of-
ten overestimate the actual error significantly (Zheng
et al., 2010).
Therefore, we have adopted a different approach
to estimate the interpolation error: We take the differ-
ence between interpolation results from a reference
high-order interpolator and a lower-order interpolator
as an estimate for the error in the low-order interpo-
lator. For the two discrete turbulence data sets we an-
alyze in this work (Iso and MHD), an exact interpo-
lator is known. Due to the pseudo-spectral method
that was used to simulate the turbulent motion (Li
et al., 2008), the velocity field is guaranteed to be
band-limited in the Fourier sense. As a consequence,
Fourier or trigonometric interpolation using trigono-
AnalyzingtheEffectofLossyCompressiononParticleTracesinTurbulentVectorFields
281

Figure 2: Path lines in the Iso and stream lines in the MHD data sets. Left: Particle trajectories using (ground truth) trigono-
metric (blue) and (established) Lagrange6 (red) interpolation in the original data for velocity sampling. Right: Particle
trajectories using trigonometric interpolation (blue) and Lagrange6 interpolation (yellow) in the compressed data. The yellow
traces appear to be of similar accuracy as the red lines.
metric polynomials of infinite support gives exact ve-
locity values between grid points (Rovelstad et al.,
1994). Due to efficiency reasons, however, what is
used in practice for particle tracing is an interpolation
scheme of “sufficiently high order” which resembles
Fourier interpolation, e.g. Lagrange6. For instance, in
Fig. 2 (left) the trajectories using trigonometric and
Lagrange6 interpolation are compared. It is worth
noting that even though in the turbulence community
it is usually agreed that Lagrange6 is of sufficient ac-
curacy for particle tracing, significant deviations from
the ground truth can be observed.
The interpolation error over the whole volume for
a given interpolator can now be computed: We up-
sample the volume to 4 times the original resolution
using the interpolator under consideration as well as
the reference interpolator. The RMS of the difference
between the upsampled volumes then is a good ap-
proximation of the average error introduced by the in-
terpolation. Since trigonometric interpolation has to
be evaluated globally, to generate the interpolant in
a computationally efficient way, we have adopted the
following approach: First, we perform a fast Fourier
transform (FFT) on the flow field using the FFTW li-
brary (Frigo and Johnson, 2005). In the frequency
domain, we then quadrupel the data resolution in each
dimension by zero padding. Finally, an inverse FFT is
performed to generate a flow field of 4 times the origi-
nal resolution. This field agrees with the original field
at every 4th vertex, and the other vertices lie on the
trigonometric interpolant between the original data
samples. Fig. 3 illustrates FFT-based upsampling in
1D, when the data resolution is doubled. Generating
the 4096
3
trigonometric interpolant from a 1024
3
ve-
locity field in this way takes about 1.5 hours including
disk I/O. Given the 4096
3
trigonometric interpolant,
evaluating the interpolation errors in a 1024
3
velocity
field for the listed interpolation schemes takes another
2 hours including disk I/O.
3.2 Error-guided Data Compression
Equipped with the average interpolation error for a
given interpolation scheme, we can locally adapt the
compression error so that it is equal to or falls below
the interpolation error. This is achieved by choosing a
quantization step in the data compression scheme so
that the prescribed error bound is not exceeded. In the
wavelet-based compression scheme we use, the aver-
age error is roughly equal in magnitude to the quan-
tization step and, thus, the acceptable error is a rea-
sonable choice for the quantization step. Table 1 lists
the RMS interpolation errors in both data sets for a
number of different interpolation schemes. To verify
that the lossy compression does not unduly affect the
interpolant, we have computed the interpolation er-
rors a second time after compression, comparing the
reconstructed volumes to the original reference solu-
tion. It can be seen that by setting the quantization
step equal to the RMS interpolation error, the error is
increased by less than 50% in all cases. It is worth
mentioning that performing the same test with an up-
sampling factor of only 2 instead of 4 yields almost
identical results (within 5% of the listed numbers). It
indicates that the discrete computation approximates
the actual interpolation error very closely. This is ex-
pected, as the reference interpolant is by definition
band-limited with respect to the original resolution,
so no high-frequency deflections can occur between
the original grid points.
It remains to show that the accumulation of the
additional quantization errors does not introduce sig-
nificantly larger regions of variation in the trajecto-
ries. A first experiment can be seen in Fig. 2 (right),
where the trajectories computed on the compressed
field using Lagrange6 interpolation are compared to
the ground truth trajectories. Compared to Fig. 2
(left), the deviations seem to be in the same order of
variation. A detailed quantitative accuracy analysis is
given in the following Section.
4 EVALUATION
To evaluate the accuracy of the resulting trajectories,
we have conducted a number of experiments where
the proposed lossy compression scheme was used. In
IVAPP2015-InternationalConferenceonInformationVisualizationTheoryandApplications
282
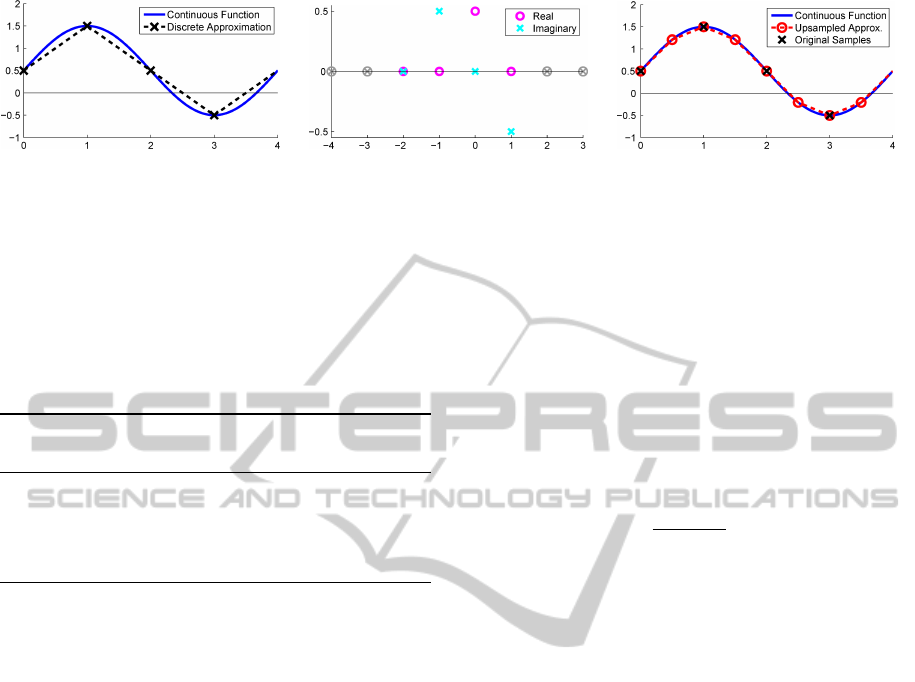
Figure 3: FFT-based upsampling process. Left: A periodic band-limited function with a period of 4, and its discrete ap-
proximation sampled at a frequency of 1. Middle: FFT coefficients of the function in magenta and cyan. Because the input
function was real, the coefficients have a Hermitian symmetry. The coefficients are padded with zeros to the left and right,
corresponding to higher frequencies with an amplitude of zero. Right: The inverse FFT of the padded coefficients results in
a higher-resolution approximation to the continuous function. Note that the even grid points of the upsampled approximation
agree with the original grid points.
Table 1: Root-mean-square interpolation errors for differ-
ent interpolation schemes in two turbulent flow fields before
(orig) and after compression (comp), compared to the refer-
ence trigonometric interpolant. The interpolation error has
been evaluated in a grid of four times the original resolution.
Iso (range: 6.67) MHD (range: 2.77)
Interpolation orig comp orig comp
Lagrange8 0.86E-3 1.26E-3 3.48E-4 4.97E-4
Lagrange6 1.10E-3 1.60E-3 4.52E-4 6.32E-4
Lagrange4 1.71E-3 2.41E-3 7.20E-4 9.63E-4
Linear 5.15E-3 6.65E-3 2.29E-3 2.81E-3
the following, we first introduce the error metrics we
use to analyze the accuracy of the computed trajecto-
ries.
4.1 Error Metrics
Due to errors induced by the employed interpolation
scheme and by lossy compression, a trajectory may
gradually diverge from the ground truth over time.
To evaluate the accuracy of computed trajectories,
an error metric is required to quantitatively measure
the difference between two trajectories starting at the
same seed point.
One obvious metric is the maximum or average
distance between trajectories s
0
(u), s
1
(u) along their
parameter u. In addition, several metrics exist which
measure some kind of distance between two curves,
such as the (discrete) Fr
´
echet distance (Eiter and
Mannila, 1994) and the distance under dynamic time
warping (DTW). While the Fr
´
echet distance corre-
sponds to a type of maximum distance, the DTW
distance is akin to an average distance. Both disre-
gard the u parametrization and instead are concerned
only with the shape of the curves. All these metrics
measure the distance along the complete trajectories.
However, once two particles have diverged by some
critical distance, their further behavior depends only
on the characteristics of the flow field: They might
diverge further or even converge again, but this pro-
vides no insight into the accuracy of the trajectory
computation. Therefore, we introduce a new metric
taking this into account, which we call the (clamped)
divergence rate. Instead of measuring a distance be-
tween trajectories, it computes the rate at which they
diverge. Given two trajectories s
0
(u), s
1
(u) over a pa-
rameter interval [u
0
, u
max
], we define their divergence
rate as
d
s
0
,s
1
:=
dist(u
div
)
u
div
− u
0
, where
dist(u) := ks
0
(u) − s
1
(u)k and
u
div
:= max
u ∈ [u
0
, u
max
]
∀ ˜u ∈ [u
0
, u] : dist( ˜u) ≤ ∆s
.
u
div
is the last point along the trajectories at which
they have not yet diverged by more than ∆s. In the
following experiments, we have set the critical dis-
tance ∆s equal to the grid spacing.
Our definition of the trajectory divergence rate is
similar in spirit to the idea of the finite-size Lyapunov
exponent (FSLE) (Aurell et al., 1997). The FSLE
measures the time it takes for two particles, initially
separated only by an infinitesimal ε, to diverge by
some given distance, usually specified as a multiple
of ε. A fundamental difference is that in our case
both trajectories start at exactly the same position, and
we measure their divergence as an absolute distance
rather than relative to their initial separation.
4.2 Error Analysis
To compare the accuracy of particle trajectories com-
puted in the original and compressed data sets, and
via different interpolation schemes, a reference solu-
tion is required to which the trajectories can be com-
pared. For the used turbulence data sets, trigonomet-
ric interpolation is known to be exact. Since evaluat-
ing the trigonometric interpolant during particle trac-
ing is impracticable, we have upsampled the data sets
to four times the original resolution (see Section 3.1)
as the ground truth. Particle trajectories traced in the
AnalyzingtheEffectofLossyCompressiononParticleTracesinTurbulentVectorFields
283
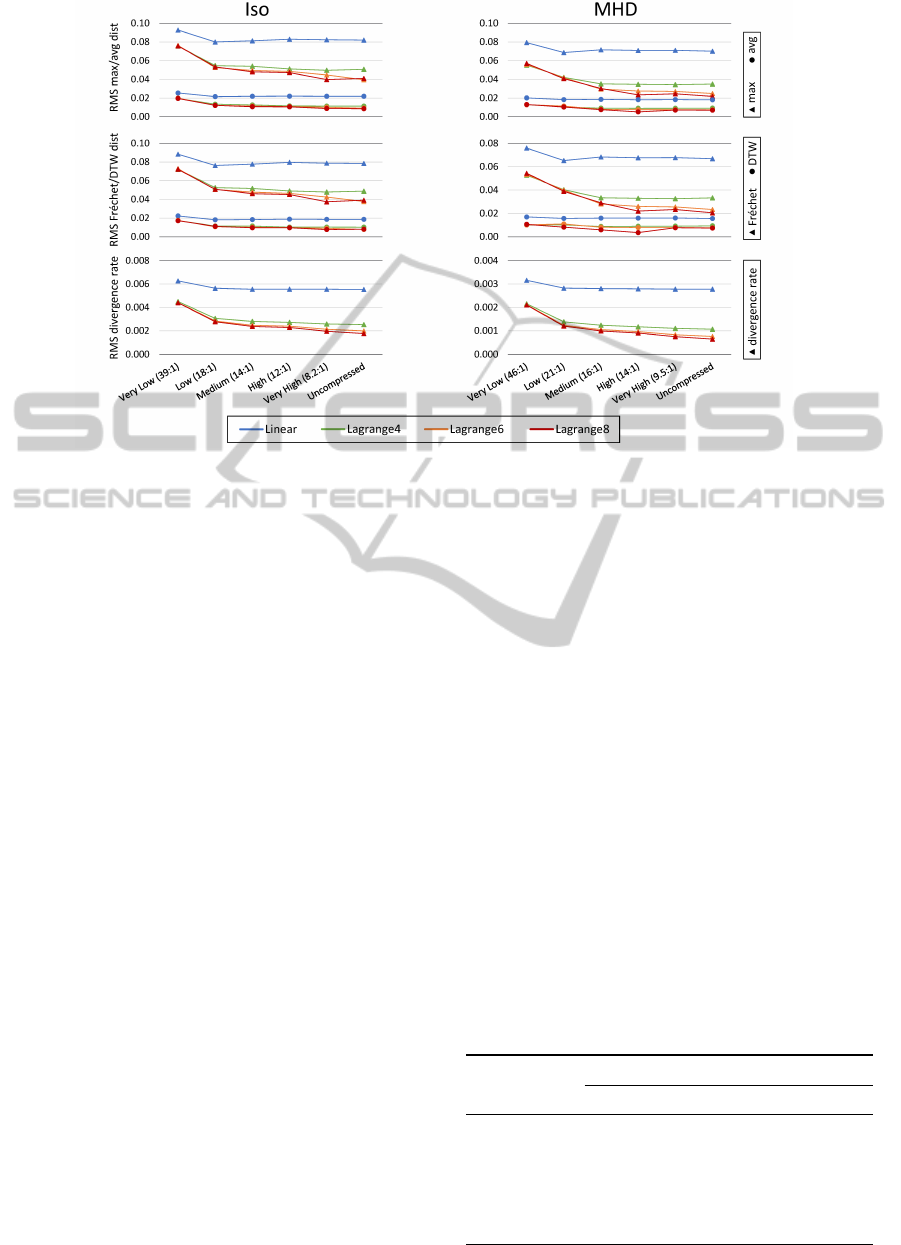
Figure 4: Accuracy of stream lines vs. compression quality using different interpolation schemes. Accuracy is reported as the
root mean square (RMS) of the individual trajectory distances (see Section 4.1), computed against trajectories traced using
the (approximate) trigonometric reference interpolation.
upsampled versions using 16th order Lagrange inter-
polation then act as the reference solution. While this
is not equivalent to true trigonometric interpolation
in the original data, the remaining error is expected
to be negligible since the difference between the two
times and four times upsampled versions is already
very small (cf. Section 3.1).
For the accuracy analysis of computed trajecto-
ries, we have generated a set of 4096 seed points in
each data set, that were randomly distributed over
the entire domain. Particles were traced from the
seed points through different versions of the data sets:
The upsampled reference version, the original un-
compressed data, and compressed versions at differ-
ent compression rates. The quantization steps for the
compressed versions were chosen equal to the errors
in linear and Lagrange4/6/8 interpolation as listed in
Table 1. In addition, we generated one high-quality
compressed version of each data set, where the quan-
tization step was set to half the Lagrange8 interpola-
tion error. The compressed file sizes and compression
rates (as the ratio of original size to compressed size)
are listed in Table 2.
To minimize the impact of inaccuracies due to nu-
merical integration errors, in all of our experiments
we used the Runge-Kutta method by (Dormand and
Prince, 1980). The method provides a 5th order so-
lution and a 4th order error estimate, which is used
for adaptive step size control. The error tolerance for
step size control was reduced until the accuracy of the
results did not improve any further.
Fig. 4 provides the main results of our accuracy
analysis. The graphs show the root mean square
(RMS) of the average, maximum, Frchet, and DTW
distance, as well as the divergence rate, over all tra-
jectories for different compression rates and interpo-
lation schemes. For reference, the grid spacing is
approximately 0.00614 in both data sets. The most
prominent finding is that linear interpolation performs
very poorly and eclipses the errors introduced at even
the highest compression rates. The differences be-
tween the other interpolation schemes are compar-
atively small; as expected, with some advantage of
the higher-order schemes. All distance metrics give
qualitatively similar results. However, all metrics ex-
cept for our novel divergence rate display a signifi-
Table 2: File sizes and compression factors. For Very Low,
Low, Medium, and High, the quantization step was chosen
equal to the error in linear and Lagrange4/6/8 interpolation,
resp. (cf. Table 1); for Very High, to half the error in La-
grange8.
Iso MHD
Quality size factor size factor
Uncompressed 14.7 GB – 14.7 GB –
Very High 1.79 GB 8.21 1.55 GB 9.48
High 1.25 GB 11.8 1.06 GB 13.9
Medium 1.08 GB 13.6 942 MB 16.0
Low 843 MB 17.9 712 MB 21.1
Very Low 387 MB 38.9 331 MB 45.5
IVAPP2015-InternationalConferenceonInformationVisualizationTheoryandApplications
284

cant amount of noise in the results. This is caused
by a few individual trajectories with a very large dis-
tance to their reference. These trajectories have a very
large impact on the RMS distance, but actually carry
little information on the accuracy of the results, as ex-
plained in Section 4.1. The divergence rate, on the
other hand, handles such trajectories well.
The most important observation with regard to the
lossy compression is that when the quantization step
is chosen smaller than the interpolation error (e.g. La-
grange4 interpolation and a compression quality of
“Medium” or higher), the additional error introduced
by the compression is extremely small. For example,
switching from Lagrange6 to Lagrange4 interpolation
has a larger impact on the accuracy than switching
from uncompressed data to the “High” compression
quality in both data sets.
5 PARTICLE TRACING SYSTEM
We have integrated the presented compression layer
into an out-of-core GPU particle tracing system to fa-
cilitates an interactive visual exploration of large scale
turbulence fields on commodity PC hardware. In the
following we will first give a brief system overview.
Next, we will evaluate its performance and, finally,
we will compare its performance to previous systems
that have employed large compute clusters to extract
integral lines from large scale (unsteady) flow fields.
5.1 System
Our proposed system for out-of-core particle tracing
takes as input a sequence of 3D velocity fields, each
field representing the state of a flow field at a different
point in time. We assume that the values in each field
are given on a Cartesian grid. In a preprocess, each
grid is partitioned into a set of equally-sized bricks. A
halo region is added around each brick to allow proper
interpolation at brick boundaries. The bricks are com-
pressed before being stored sequentially on disk.
At runtime, the computation of particle trajecto-
ries is performed on the GPU. For that, bricks which
are required to perform the numerical integration are
requested from the CPU and cached in their com-
pressed form in main memory. The compression
reduces disk bandwidth requirements and allows us
to cache a large number of bricks. For use on the
GPU, the compressed brick data is uploaded into GPU
memory and immediately decompressed. In the cur-
rent implementation we use bricks of size 128
3
each
(including a halo region of size 4). We have found
that this size provides the best trade-off between lo-
cality of access and storage overhead for the halo
regions. Multiple bricks are stored in a brick atlas
whose size is chosen based on the amount of avail-
able GPU memory.
Fluid particles are advected in parallel on the GPU
to exploit memory bandwidth and computational ca-
pacities. We use the CUDA programming API and is-
sue one thread per particle, grouped into thread blocks
of size 128. Each thread advects the position of its
particle while the required flow data is available in the
brick atlas. Since the set of bricks which are required
to perform the computation of all trajectories does not
fit into GPU memory in general, only a subset can be
made available at a time. An additional index buffer
stores the mapping from a brick index (a tuple con-
sisting of a spatial index and an id for the time step)
to position in the brick atlas. If a particle enters a re-
gion for which the respective brick is missing in the
brick atlas (flagged by a −1 in the index buffer), the
GPU requests this brick for the next round of trac-
ing. This is realized by atomically incrementing the
corresponding entry in an additionally requests buffer
which maps spatial regions and point in time to brick
indices.
The GPU stops when all particles a) must stop
because they are waiting for a brick to be uploaded
to the GPU, b) have been advected for a predefined
amount of time, or c) have been advanced by a fixed
maximum number of steps (64 in the current imple-
mentation). The CPU then downloads the requests
buffer and determines the bricks to be uploaded next
into the atlas–prioritized by their respective request
count. When path lines are traced, requested bricks
corresponding to an earlier time step are prioritized
higher so that all path lines advance in time at roughly
the same speed, thus reducing multiple uploads of the
same data during the execution of one multi-pass ad-
vection step. If the systems main memory is too small
to hold all necessary bricks, the CPU fetches the brick
data from disk and replaces an existing brick in mem-
ory based on an LRU (Least Recently Used) caching
strategy. The CPU also tracks the earliest time step
which was requested globally and pages out all brick
time steps older than that, since they will not be vis-
ited again by the current particles. The requested
bricks are then sent to the GPU and particle tracing
is restarted. The process is finished once all particles
have either reached their maximum age or left the do-
main.
Special care has to be taken whenever a parti-
cle moves close to a brick boundary. In this case it
has to be ensured that all velocity values required in
the integration step are available in the current brick.
AnalyzingtheEffectofLossyCompressiononParticleTracesinTurbulentVectorFields
285

While we employ a halo region to ensure that all val-
ues required by the support of the interpolation kernel
are available, for a multi-stage integration method not
only the initial particle location, but also all interme-
diate stages of the integrator must reside within the
admissible area. This can be guaranteed by adapting
the maximum integration step size ∆t appropriately.
5.2 Performance Evaluation
The performance of any particle tracing system de-
pends on a multitude of factors, such as the charac-
teristics of the data set, the number and placement
of seeding locations, and the total integration time.
This makes an exhaustive performance evaluation and
comparison to other approaches fairly difficult. In-
stead, we tried to capture the typical performance
characteristics of our system. For both data sets, we
investigated the following two scenarios:
1. Sparse. This is the same scenario that was used
for pursuing the accuracy analysis. 4096 seeding
locations are distributed uniformly in the domain,
and particles are traced for 2.5 and 5 time units in
Iso and MHD, respectively.
2. Dense. This scenario models an interactive explo-
ration. 1024 seed points are placed within a small
box with an edge length of 10% of the domain
size. The particles are traced over 5 and 10 time
units in Iso and MHD, respectively.
All timings were measured on a PC with an Intel
Core i5-3570 CPU (quad-core, 3.4 GHz) with 8 GB
of DDR3-1600 RAM, equipped with an NVIDIA
GeForce GTX 680 GPU with 4 GB of video mem-
ory. The size of the brick atlas was set to 2 GB of
video memory.
We have traced particles starting from the se-
lected seed points in both the uncompressed and the
compressed data sets to demonstrate the performance
gains that can be achieved via compression. In all
experiments, Lagrange6 interpolation was performed;
the particle integration times are about 3× higher with
Lagrange8, and about 4× lower with Lagrange4 inter-
polation. When particle tracing was performed on the
compressed data, the timings refer to the “High” com-
pression quality. The decompression times for other
compression rates differ only very slightly. To mea-
sure the impact of disk I/O, we have run every bench-
mark a second time, so that all required data was al-
ready cached in CPU memory. With uncompressed
data, however, this was only possible for the dense
scenario; in case of sparse particle seeding, the size
of the working set exceeded the available CPU mem-
ory (even for stream lines extracted from a single time
step). Table 3 lists the time required for running each
scenario, and Table 4 lists the sizes of the correspond-
ing working sets.
It can be seen that the use of compression allows
us to trace thousands of characteristic lines within
seconds in the dense seeding scenario. In the sparse
seeding case, the required time is around an order of
magnitude higher. The reason becomes clear when
looking at the size of the working sets, which are
larger by roughly the same factor in those cases.
Without compression, the overall system perfor-
mance is clearly limited by disk bandwidth. In par-
ticular, in the sparse scenario, the working set was
so much larger than main memory (cf. Table 4)
that some bricks had to be loaded from disk multi-
ple times. Even when all required data is already
cached in CPU memory (which was only possible
in the dense scenario), the performance of the com-
pressed and uncompressed cases is very similar—the
runtime overhead caused by the additional decom-
pression step is very minor.
It is clear that when tracing path lines, the work-
ing sets are much larger because often many differ-
ent time steps of the same spatial brick are required.
In particular, the temporal distance between succes-
sive time steps is extremely small in both data sets
(0.002 time units for Iso, 0.0025 for MHD). Because
of this, the time required for path line computation is
spent almost exclusively on disk-to-CPU data trans-
fer and GPU decompression, and only a negligible
amount of time is spent on the actual particle integra-
tion (less than 1% in our tests). For example, tracing a
set of path lines with the dense seeding configuration
through Iso takes about 6 minutes, with a working set
size of over 25 GB of compressed data. In the un-
compressed setting, the working set comprises over
300 GB. Correspondingly, tracing these path lines in
Table 3: Times in seconds for computing stream lines, both
for the cached case (C) and the un-cached case including
disk access times (U). Individual times for uploading the
data to the GPU (Upl, including decompression), particle
integration (Int), and disk I/O (IO, overlapping Upl and Int)
are listed separately.
Scenario Quality U C Upl Int IO
Iso dense
High 2.3 1.4 0.8 0.6 1.9
Uncomp 18.6 1.3 0.7 0.6 17.8
Iso sparse
High 21.6 16.4 12.4 3.8 14.9
Uncomp 156.9 n/a 10.7 3.8 156.4
MHD dense
High 3.4 2.3 1.4 0.8 2.8
Uncomp 26.3 2.3 1.4 0.8 25.6
MHD sparse
High 19.9 16.2 11.8 4.2 13.6
Uncomp 139.7 n/a 10.4 4.2 138.8
IVAPP2015-InternationalConferenceonInformationVisualizationTheoryandApplications
286

Table 4: Working set sizes in both compressed (High) and
uncompressed (Uncomp) form. Also shown is the number
of bricks in the working set (#B) as well as the number of
brick uploads during particle integration (#U).
Scenario High Uncomp #B #U
Iso dense 165.9 MB 2155.5 MB 92 92
Iso sparse 1280.6 MB 15058.9 MB 728 1341
MHD dense 243.8 MB 3231.0 MB 138 155
MHD sparse 1095.5 MB 15066.5 MB 729 1298
the uncompressed data set takes almost an hour, and
most of that time is spent on disk I/O. In MHD, the
time required for path line tracing is similar; in all
cases, the time scales proportionally to the working
set size.
5.3 Comparison to Previous Work
To the best of our knowledge, all previous techniques
for particle tracing in very large flow fields have em-
ployed large compute clusters. Pugmire et al. (Pug-
mire et al., 2009) have used 512 CPUs to trace 10K
stream lines in two steady flow fields comprising 512
million grid cells each. They report wall times of 10
to 100 seconds. Camp et al. (Camp et al., 2011) later
improved those timings to a few seconds for tracing
thousands of stream lines on 128 cores. Nouanesen-
gsy et al. (Nouanesengsy et al., 2011) achieve timings
between 10 and 100 seconds using 4096 cores for the
computation of 256K stream lines in regular grids of
up to 1.67 billion grid points, but at the cost of an
expensive preprocess. Peterka et al. (Peterka et al.,
2011) report computation times of about 20 seconds
using 8192 cores for 128K stream lines in a 1024
3
steady flow, and several minutes for 32K lines in a
2304 × 4096 × 4096 steady flow. In contrast to all
other mentioned approaches, they have also addressed
large unsteady flow fields. In a 1408 ×1080× 1100×
32 unsteady flow, the processing time is several min-
utes for 16K path lines on 4096 cores.
While an exact performance comparison to our tech-
nique is not possible due to the different data sets
and interpolation/integration schemes used, an order-
of-magnitude comparison reveals that our method
achieves competitive timings to the previous ap-
proaches in many cases, particularly in dense seeding
scenarios, while making use of only a single desktop
PC.
All in all it can be said that due to the use of an
effective compression scheme, the performance of
particle tracing in extremely large flow fields can
be improved significantly. It is clear that due to the
immense working set that is required when computing
path lines, fully interactive rates cannot be achieved
in this case.
6 CONCLUSION
In this paper we have discussed the application of
lossy compression of large scale turbulent vector
fields in the context of particle tracing to overcome
bandwidth limitations and storage requirements. And
we have demonstrated how this compression layer can
be integrate into an out-of-core GPU particle tracer,
to facilitate an interactive visual exploration of tera
scale data sets on a desktop PC. This gives rise to
integrating the exploration process into a researchers
daily workflow as a means to validate hypotheses. In
a number of experiments we have demonstrated that
compared to interpolation errors in the reconstruc-
tion of the velocity field, the compression errors do
not significantly affect the accuracy of the computed
trajectories. In the statistical sense, the quality of
the computed trajectories remains in the same order.
A performance analysis indicates that such a system
achieves a throughput that is comparable to that of
previous systems running on high-performance archi-
tectures.
The most challenging future avenue of research
will be the investigation of the effect of lossy data
compression in scenarios other than turbulence re-
search. The question will be whether lossy data com-
pression can also be applied to other flow fields with-
out unduly affecting the accuracy of the resulting tra-
jectories. The main difficulty is that for most flow
fields a “correct” interpolation scheme is not avail-
able, so the interpolation error can not be estimated
accurately. However, different criteria might be found
to steer the compression quality, e.g. given confidence
intervals for the velocity values.
ACKNOWLEDGEMENTS
The work was partly funded by the European Union
under the ERC Advanced Grant 291372: Safer-Vis -
Uncertainty Visualization for Reliable Data Discov-
ery. The authors want to thank Charles Meneveau
from Johns Hopkins University and Tobias Pfaffel-
moser from TUM for helpful discussions and con-
structive criticism.
AnalyzingtheEffectofLossyCompressiononParticleTracesinTurbulentVectorFields
287

REFERENCES
Aurell, E., Boffetta, G., Crisanti, A., Paladin, G., and Vulpi-
ani, A. (1997). Predictability in the large: an extension
of the concept of Lyapunov exponent. J. Physics A:
Mathematical and General, 30(1):1–26.
Balachandar, S. and Maxey, M. R. (1989). Methods for
evaluating fluid velocities in spectral simulations of
turbulence. J. Computational Physics, 83(1):96–125.
Balsa Rodriguez, M., Gobbetti, E., Iglesias Guiti
´
an, J.,
Makhinya, M., Marton, F., Pajarola, R., and Suter,
S. (2013). A survey of compressed GPU-based di-
rect volume rendering. In Eurographics 2013 - STARs,
pages 117–136.
Bruckschen, R., Kuester, F., Hamann, B., and Joy, K. I.
(2001). Real-time out-of-core visualization of parti-
cle traces. In Proc. IEEE 2001 Symp. on Parallel and
Large-Data Visualization and Graphics, pages 45–50.
Camp, D., Garth, C., Childs, H., Pugmire, D., and Joy, K.
(2011). Streamline integration using MPI-hybrid par-
allelism on a large multicore architecture. IEEE Trans.
Vis. Comput. Graphics, 17(11):1702–1713.
Dormand, J. R. and Prince, P. J. (1980). A family of em-
bedded Runge-Kutta formulae. J. Computational and
Applied Mathematics, 6(1):19–26.
Eiter, T. and Mannila, H. (1994). Computing discrete
Fr
`
echet distance. Technical Report CD-TR 94/64,
Technische Universit
¨
at Wien.
Ellsworth, D., Green, B., and Moran, P. (2004). Interactive
terascale particle visualization. In IEEE Visualization,
pages 353–360.
Fout, N. and Ma, K.-L. (2012). An adaptive prediction-
based approach to lossless compression of floating-
point volume data. IEEE Trans. Vis. Comput. Graph-
ics, 18(12):2295–2304.
Fout, N. and Ma, K.-L. (2013). Fuzzy volume rendering.
IEEE Trans. Vis. Comput. Graphics, 18(12):2335–
2344.
Frigo, M. and Johnson, S. G. (2005). The design and im-
plementation of FFTW3. Proc. IEEE, 93(2):216–231.
Isenburg, M., Lindstrom, P., and Snoeyink, J. (2005). Loss-
less compression of predicted floating-point geometry.
Computer Aided Design, 37(8):869–877.
Lane, D. A. (1994). UFAT—a particle tracer for time-
dependent flow fields. In IEEE Visualization, pages
257–264.
Laramee, R. S., Hauser, H., Doleisch, H., Vrolijk, B., Post,
F. H., and Weiskopf, D. (2004). The state of the art
in flow visualization: Dense and texture-based tech-
niques. Computer Graphics Forum, 23(2):203–221.
Li, Y., Perlman, E., Wan, M., Yang, Y., Meneveau, C.,
Burns, R., Chen, S., Szalay, A., and Eyink, G. (2008).
A public turbulence database cluster and applications
to study Lagrangian evolution of velocity increments
in turbulence. J. Turbulence, 9:N31.
Lindstrom, P. and Isenburg, M. (2006). Fast and efficient
compression of floating-point data. IEEE Trans. Vis.
Comput. Graphics, 12(5):1245–1250.
McLoughlin, T., Laramee, R. S., Peikert, R., Post, F. H., and
Chen, M. (2010). Over two decades of integration-
based, geometric flow visualization. Computer
Graphics Forum, 29(6):1807–1829.
Nouanesengsy, B., Lee, T.-Y., and Shen, H.-W. (2011).
Load-balanced parallel streamline generation on large
scale vector fields. IEEE Trans. Vis. Comput. Graph-
ics, 17(12):1785–1794.
Peterka, T., Ross, R., Nouanesengsy, B., Lee, T.-Y., Shen,
H.-W., Kendall, W., and Huang, J. (2011). A study
of parallel particle tracing for steady-state and time-
varying flow fields. In Parallel Distributed Processing
Symposium (IPDPS), pages 580–591.
Post, F. H., Vrolijk, B., Hauser, H., Laramee, R. S., and
Doleisch, H. (2003). The state of the art in flow visu-
alisation: Feature extraction and tracking. Computer
Graphics Forum, 22(4):775–792.
Pugmire, D., Childs, H., Garth, C., Ahern, S., and Weber,
G. H. (2009). Scalable computation of streamlines on
very large datasets. In Proc. Conf. on High Perfor-
mance Computing, Networking, Storage and Analysis,
pages 16:1–16:12.
Rovelstad, A. L., Handler, R. A., and Bernard, P. S. (1994).
The effect of interpolation errors on the Lagrangian
analysis of simulated turbulent channel flow. J. Com-
putational Physics, 110(1):190–195.
Sayood, K. (2005). Introduction to Data Compression.
Morgan Kaufmann Publ. Inc., 3rd edition.
Teitzel, C., Grosso, R., and Ertl, T. (1997). Efficient and
reliable integration methods for particle tracing in un-
steady flows on discrete meshes. In Visualization in
Scientific Computing, pages 31–41.
Treib, M., B
¨
urger, K., Reichl, F., Meneveau, C., Szalay,
A., and Westermann, R. (2012). Turbulence visual-
ization at the terascale on desktop PCs. IEEE Trans.
Vis. Comput. Graphics, 18(12):2169–2177.
Yeung, P. K. and Pope, S. B. (1988). An algorithm for
tracking fluid particles in numerical simulations of
homogeneous turbulence. J. Computational Physics,
79(2):373–416.
Yu, H., Wang, C., and Ma, K.-L. (2007). Parallel hierar-
chical visualization of large time-varying 3D vector
fields. In Proc. ACM/IEEE Conf. on Supercomputing,
pages 24:1–24:12.
Zheng, Z., Xu, W., and Mueller, K. (2010). VDVR: Veri-
fiable volume visualization of projection-based data.
IEEE Trans. Vis. Comput. Graphics, 16(6):1515–
1524.
IVAPP2015-InternationalConferenceonInformationVisualizationTheoryandApplications
288
