
Video Segmentation via a Gaussian Switch Background Model and
Higher Order Markov Random Fields
Martin Radolko and Enrico Gutzeit
Fraunhofer Institute for Computer Research IGD, 18059 Rostock, Germany
Keywords:
Image Segmentation, Background Substraction, Belief Propagation, Otsu’s Method, Markov Random Fields.
Abstract:
Foreground-background segmentation in videos is an important low-level task needed for many different ap-
plications in computer vision. Therefore, a great variety of different algorithms have been proposed to deal
with this problem, however none can deliver satisfactory results in all circumstances. Our approach combines
an efficent novel Background Substraction algorithm with a higher order Markov Random Field (MRF) which
can model the spatial relations between the pixels of an image far better than a simple pairwise MRF used in
most of the state of the art methods. Afterwards, a runtime optimized Belief Propagation algorithm is used
to compute an enhanced segmentation based on this model. Lastly, a local between Class Variance method is
combined with this to enrich the data from the Background Substraction. To evaluate the results the difficult
Wallflower data set is used.
1 INTRODUCTION
Nowadays Vision Systems are used in many fields
of applications such as surveillance, industrial au-
tomation, transportation or inspection. In the last
decades Background Substraction has become a valu-
able source of low level visual information. It can de-
tect arbitrary objects in almost any scene, as long as
they are in motion. This information can afterwards
be used for all kinds of high-level vision tasks.
In order to gather the aforementioned data the
background for each individual scene has to be mod-
elled. The creation of this model is not a trivial task
and associated with many difficulties like changes in
the lightning conditions, moving background objects
(swaying trees), shadows or a changing background.
To cope with all these requirements a great number
of different approaches have been deployed. Some
use Subspace Learning Models like LDA (Kim et al.,
2007), INMF (Bucak et al., 2007) or PCA (Marghes
et al., 2012) to generate a background model. Other
prominent methods adopt techniques like Kalman Fil-
ters (Cinar and Principe, 2011), SVMs (Lin et al.,
2002) or histograms (Zhang et al., 2009) to cope with
these problems.
However, most of the current algorithms model
each background pixel as a Gaussian Distribution.
This is justified by the fact that the intensity of a pixel
in a completely static scene will vary according to a
Normal distritution N (µ,σ
2
) due to the measurement
errors inherent in every camera system. With this in-
formation, a threshold per pixel can be easily created
to distinguish between foreground and background.
There are approaches which use just one Normal
Distribution per pixel (Wren et al., 1997), algorithms
which use a Mixture of Gaussians (Stauffer and Grim-
son, 1999; Setiawan et al., 2006) or Gaussian-Kernel
based methods (Elgammal et al., 2000) to model the
background. Methods which use a Mixture of Gaus-
sians (MoG) produce in most cases better results than
the Single Gaussian (SG) algorithms, but also have
some disadvantages. One is a higher memory usage
and another the need to be tuned for the right amount
of Gaussians.
A shared drawback of all Background Substrac-
tion approaches is that they do not incorporate the
spatial informations about the scene in the model,
although natural images are commonly assumed to
be very smooth. To use this assumption to improve
the segmentation derived from the Background Sub-
straction different strategies have been applied. In
(Toyama et al., 1999) a simple approach is used which
discards all connected regions containing less than a
certain amount of pixels. A more complex approach
is used in (Y. Wang and Wu, 2006) where a Condi-
tional Random Field models the neighbourhood rela-
tions of the pixels. Graph Cuts are used in (Boykov
and Funka-Lea, 2006) and to represent the spatial in-
537
Radolko M. and Gutzeit E..
Video Segmentation via a Gaussian Switch Background Model and Higher Order Markov Random Fields.
DOI: 10.5220/0005308505370544
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 537-544
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

formation in all dimension in a Subspace Model a
Tensor was applied (Li et al., 2008).
The most frequently utilized method for this prob-
lem is a MRF which models the relations via an undi-
rected graph. The most likely overall state of the
model (maximum a posteriori probability - MAP) will
correspond with a good segmentation if the underly-
ing data (a probability map) is adequate. Since it is
NP-hard to compute the MAP for a cyclic MRF, there
exists several methods to approximate the best solu-
tion. In (Xu et al., 2005) Gibbs-Sampling is combined
with simulated annealing, (Sun et al., 2012) applies
a Branch and Bound algorithm and (Yedidia et al.,
2003) utilises a Belief Propagation method to get a
good approximation of the MAP.
Building on this, a new method composed of three
parts is developed. First, a new Background Substrac-
tion algorithm will be proposed which uses exactly
two Gaussians and thereby eliminates most of the dis-
advantages of the MoG approaches, but nonetheless
generates state of the art results. Secondly, a higher
order MRF with a variable neighbourhood is created
to model the spatial relations of the objects in the
scene. A Belief Propagation algorithm is used to de-
rive a suitable approximation of the MAP. Lastly, a
component was added which influences the segmen-
tation to maximize the between-class variance. The
basic idea was first proposed in (Otsu, 1979) and
is widely appreciated since then (Liao et al., 2011;
Huang et al., 2001). Here, the approach is used in
a combination with the Belief Propagation algorithm
so that the between class variance is optimized during
the iterations as well.
2 HIGHER ORDER MARKOV
RANDOM FIELDS
The MRF is a well established and widely used statis-
tical model which can describe the dependencies be-
tween various random variables. It originates from
the works of Ising on ferromagnetism (Ising, 1925)
but was since extended and adopted to a large number
of different problems.
A small example of a MRF represented as a graph
can be seen in Figure 1. The random variables are
depicted as circles and the edges show the dependen-
cies between them. This easy and graphical way of
modeling the relations between random variables can
be useful in a great variety of applications, one ex-
ample are the spatial relations between pixels in an
image. In this case every pixel is represented by one
random variable for which the state is unknown and
which has dependencies on all neighbouring pixels.
Figure 1: A graphical depiction of a small MRF.
Thereby, the state of a random variable could indi-
cate if the corresponding pixel is in the foreground
of the image, denote the optical flow at that point or
any other information which can be deduced from the
data.
A crucial point for this is the selected neighbourhood
system. A small system like the von Neumann neigh-
bourhood might be unable to model all the complexity
of the relations and bigger systems will soon create
models which are unmanageable. For computer vi-
sion algorithms the von Neumann neighbourhood is
almost always chosen because it will create a pair-
wise MRF. These MRF have the advantage that they
only have cliques of one or two nodes which makes
the computation much easier.
The computational difficulties derive from the fact
that in every clique all members will be influenced
from all the others. To deduce an approximate so-
lution of the MAP a Belief Propagation algorithm
will compute messages from every clique to all of its
members. This means that in Figure 1 node E will
receive one message depending only on A (E and A
are a clique), one depending only on B but also a third
message depending on both of them (A, E and B are
a clique). For bigger neighbourhoods each node can
be in tens or even hundreds of different cliques which
will make the computation and storage of all the mes-
sages nearly impossible.
In the Moore neighbourhood, which is the next
bigger neighbourhood system occasionally used for
images, every node is already a member in 24 cliques.
Also, it has to be noted that there is not just one mes-
sage from every clique to each member but one mes-
sage for every possible state the whole clique can be
in. To reduce this heavy computational load there will
be two techniques introduced in section 3.2 which
will make it possible to compute good approxima-
tions of the MAP even for advanced neighbourhood
systems.
Until now the proposed MRF only models the spa-
tial relationship of the pixels. To generate good seg-
mentations the information given by the image also
have to be included into the model. In the proposed
method this will be a value generated by the Back-
ground Substraction method denoting the probabil-
ity of a pixel being in the background. To include
this information, a second node with a fixed/known
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
538

state will be created for every pixel. This new node
is called an evidence node because it represents given
information in the model. The others are called hid-
den nodes since they indicate an unknown state of the
system which shall be deduced. Every evidence node
will influence only the corresponding hidden node
and in a way that it will more likely attain the state
favoured by the given data. An example of a MRF
model with a Moore Neighbourhood can be seen in
Figure 2.
Figure 2: The evidence nodes are drawn as small dark cir-
cles. Each is connected with one edge to the corresponding
hidden node. For two hidden nodes the edges to the other
neighbouring hidden nodes are also drawn.
3 OUR APPROACH
Our approach consists of three main steps.
• First, a novel efficient Gaussian Switch Model
is used to create an approximation of the back-
ground which is then subtracted from every new
frame to create a first segmentation.
• A MRF is used in the second step to model the
spatial relations between the pixels. Unlike many
other approaches, a MRF of higher order is used
here to reproduce the relations between different
pixels in the MRF more precisely.
• In the last step, a local version of Otsu’s Method is
added to optimize the data generated by the Back-
ground Substraction. These changes will influ-
ence the Belief Propagation, so that the resulting
segmentation has a high local between Class Vari-
ance which will further improve the outcomes.
3.1 The Gaussian Switch Model
As justified previously, Gaussian distributions are
used to model the colour of each pixel. Instead of
using a batch method, which will save the last n pic-
tures and generate a background model from these,
the Gaussians are updated with every new frame to
save memory and computing power. Thereby, the al-
gorithm gives the new samples automatically a higher
weight than old samples and thus even improves the
results in comparison to the batch method. For ev-
ery Gaussian, the mean µ and variance σ
2
have to
be stored. The mean is initiated with the pixel value
taken from the first frame of the video stream and the
variance is set to a predefined value. Afterwards, they
are updated in the following way
µ
t+1
= α µ
t
+ (1 −α) v
t
, (1)
(σ
t+1
)
2
= α σ
t
+ (1 −α)(µ
t
− v
t
)
2
. (2)
The variable α ∈ [0,1] controls the update rate and v
t
is the pixel value taken from the t-th frame. In the
rest of the paper the index t will be omitted because
all variables are taken from the same frame.
With these formulas, the Gaussian distribution of
a background pixel can be modelled very precise and
efficient. Nevertheless, one problem is that the dis-
tribution becomes erroneously when a foreground ob-
ject is visible. To overcome this problem, the back-
ground Gaussian N (µ
bg
,(σ
bg
)
2
) is created which will
only get updated when the new pixel is classified as
background. This results in a much more resilient
background model but has two inherent problems.
The first issue are objects in motion visible in the first
frame because the real background in this area would
never get included into the model. The other problem
are foreground objects that become background (e.g.
a car that parks), because they will never get included
into the background model. To eliminate these errors
an overall Gaussian N (µ
og
,(σ
og
)
2
) is needed which
will be updated with every new frame.
If this overall Gaussian has a small variance but a
different mean than the background Gaussian, a fore-
ground object was visible and immobile for a long pe-
riod of time. This foreground object should therefore
become a part of the background model. To achieve
this, the mean and variance of the background Gaus-
sian are switched to the overall Gaussian’s values.
Now, one intensity value per pixel can be modelled
in this way but most videostreams today are not in
grayscale and consequently have three colour values
for each pixel. To use these additional data a special
colour space is applied which normalises the differ-
ent intensities in respect to the illumination (Li et al.,
2008). Let R, G and B be the given values for a sin-
gle pixel in the standard RGB colour space, then these
will be transformed into the three new image channels
I = R + B + G,
˜
R = R/I,
˜
B = B/I.
VideoSegmentationviaaGaussianSwitchBackgroundModelandHigherOrderMarkovRandomFields
539

Afterwards the intensity I is normalized, so that all
values are in the range of [0, 1]. The colour informa-
tion stored in
˜
R and
˜
B are normalised with the inten-
sity and will thus not be altered by small or medium
changes in the lighnting conditions. This is used to
avoid the detection of shadows as foreground.
For each of these three values an independent
Gaussian Switch Model (GSM) has to be applied. To
decide whether a pixel matches the background model
the values for each channel will be separately com-
pared to the corresponding GSM. Let p
R
be the new
˜
R
value for a pixel, it is classified as matching the back-
ground model if the following inequality is satisfied:
(p
R
− µ
bg
R
)
2
< max(β · (σ
bg
R
)
2
,0.001). (3)
The maximum is used because the variance could ap-
proach near zero values, especially since only match-
ing values are included into the background model.
The parameter β can control the range of values which
are still classified as “matching the model”. This use
of the variance provided the algorithm with a pixel-
wise adaptive threshold.
To get a decision for a single pixel as a whole
a voting procedure is chosen. If for a single pixel
equation (3) is satisfied for atleast two channels, then
the pixel is marked as background, otherwise as fore-
ground. Thereby, the colour information can overrule
the brightness information and hence shadows should
not be detected as foreground.
In (Toyama et al., 1999) a method is proposed
which takes global changes in the lightning condition
into account, for example when a cloud is blocking
the sun and makes the whole scene darker. These
events often result in the classification of almost the
whole scene as foreground and afterwards it takes the
model a long time to adapt to the new conditions. To
improve this behaviour, the algorithm will check in
every new frame if more than 75% of the pixels are
classified as foreground, if only the intensity channel
is taken into consideration. Should this be the case
the update rate α is set to 0.5 to increase the adaption
speed of the model drastically.
3.2 The Markov Random Field
In the next step the result from the Background Sub-
straction algorithm will be optimized by correcting
small areas with false detections to get contiguous
foreground and background regions. To achieve this
the MRF described in section 2 is used. It can model
the spatial relations between single pixels and hence
forces the segmentation to be locally coherent.
The neighbourhood system is the most important
part of a MRF. Here a Generalized Moore Neighbour-
hood (GMN) is used to ensure the homogeneity of
the MRF and because it can be easily changed in size.
The normal Moore Neighbourhood is shown in Figure
2 for two different nodes. For a node N this neigh-
bourhood system is defined by a three times three
square of nodes with N in the center of it. All nodes
of the square are then neighbours of N. The first or-
der GMN uses a 5 × 5 square instead of a 3 × 3 one,
the second order GMN then enlarges this to a 7 × 7
square and so forth. Hereby, the number of cliques
will increase radically with the order of the GMN.
As input the MRF needs in principle two values
for each pixel, one should indicate the probability of
the pixel for being in the foreground and the other the
probability of being in the background. These data is
needed for the evidence nodes, so that they can rep-
resent the result of the Background Substraction al-
gorithm. Here just one value w
i
is used, which is the
probabilty that the pixel i belongs to the background.
As this value is already normalisied the other proba-
bility can be set to 1 − w
i
. To calculate w
i
the voting
algorithm is used again. At the beginning w
i
is set to
0.9 and then for each of the three channels which does
not match the background model the value is lowered.
For the two colour channels 0.3 are subtracted
in each case and for the intensity channel 0.2 is de-
ducted. By this means the probability will always be
above 50% if at least two of the channels favour the
background and less than 50% otherwise. The colour
channels get an higher weight because a change in the
colour is a better indicator for the pixel being fore-
ground than a change in the intensity.
To eventually compute an approximation of the
MAP a cost function has to be defined which mea-
sures how good a segmentation matches the MRF
model. A function D(i) is needed for the evidence
nodes and shall describe how good a certain state of
the corresponding hidden node matches the data de-
livered from the Background Substraction. In our
case the function for the hidden node i is defined as
follow:
D(i) =
w
i
, i is background
1 − w
i
, i is foreground
(4)
A second set of functions is necessary for the cliques
of hidden nodes. They are named C
k
, the k indicating
the size of the clique. These functions should rep-
resent the spatial relationship between the pixels and
hence there can be different functions for all possi-
ble clique sizes and spatial arrangements. However,
in this case the beneficial homogenous structure of
the MRF can be exploited. Since all hidden nodes
have the same neighbourhood and a coherent segmen-
tation shall be created everywhere, the functions C
k
can be the same for all nodes. A small exception are
the boundaries, there the neighbourhood is smaller
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
540

and consequently the number of cliques decreases.
Nonetheless, for the remaining cliques the standard
functions can be applied.
More problematic is the fact that different function
values have to be calculated for every single clique a
node is part of, this increases the complexity of the
model dramatically. To reduce the computational load
only one clique size was chosen to contribute to the
energy function. This simplification will drastically
decrease the number of messages which have to be
send later in the Belief Propgation algorithm.
Another way to lessen the computational burden is
the usage of a simple energy function for the remain-
ing cliques. Due to the fact that large homogenous
fore- or background regions are presumed, the func-
tions C
k
should favour the cases where all nodes in
the clique have the same state. This can be achieved
by returning 0 energy for this case and a positiv static
value for all other cases. Equation (5) gives an exam-
ple for the case k = 4, there h
1
to h
4
are the states
of the four different hidden nodes contained in the
clique.
C
4
(h
1
,h
2
,h
3
,h
4
) =
0, h
1
= h
2
= h
3
= h
4
1, elsewise
(5)
These simplifications are required, since without
them it would not be feasible to use more than the
Moore Neighbourhood on any picture with a reason-
able resolution. A comparison of the effects of dif-
ferent neighbourhood systems and clique sizes can be
seen in Figure 3 in the result section.
To eventually compute the MAP of the MRF the
respective graph was first converted to a factor graph
and then a loopy max-product Belief Propagation was
applied. For details see (Yedidia et al., 2003) and
(Felzenszwalb and Huttenlocher, 2004).
3.3 Using the Between Class Variance
In (Otsu, 1979) a method is described to segment a
picture into two classes by maximizing the variance
between the two classes. This results in an useful
segmentation only under very specific circumstances.
Namely, when the objects of interest are all similar
among them and different from the background in
colour and brightness. It is obvious that this assump-
tion cannot be made in real life images.
However, in most cases this assumption will hold
if only a small area around a pixel is taken into ac-
count. To use this to improve the segmentation cre-
ated in the first two steps, a local between Class Vari-
ance is introduced and coupled with the Belief Prop-
agation to enrich the data taken from the Background
Substraction in each iteration.
A segmentation has to be known first to compute
the between Class Variance. For this reason, one is
created after every iteration of the Belief Propagation
algorithm and then for every pixel the average colours
of all background and foreground pixels, but only in
a small square-sized area around this pixel, are cal-
culated. Now the background probability w
i
will be
increased if the colour of current pixel is closer to the
background average colour and lowered elsewise.
To be more precise, let c
bg
= (c
bg
I
,c
bg
R
,c
bg
B
) and
c
f g
be the local average colour of the background re-
spectively foreground and c
i
the colour of the cur-
rent pixel. If kc
bg
− c
i
k
2
< kc
f g
− c
i
k
2
the between
class variance will increase when the current pixel is
classified as background. If the inequality does not
hold, the pixel should be classified as foreground to
increase the local between class variance.
However, the classification of the current pixel
will not be directly changed according to the between
Class Variance. Instead, the data obtained from the
Background Substraction is altered to reinforce a clas-
sification which increases the local between Class
Variance in the following iterations. For the pixel i
this is done by computing the value
v
i
= γ · (kc
f g
− c
i
k
2
− kc
bg
− c
i
k
2
) (6)
and changing the probability w
i
accordingly. Gamma
is a factor which controls the impact the Class Vari-
ance will have on the data from the Background Sub-
straction. Now the values p
bg
i
and p
f g
i
can be calcu-
lated which represent the new foreground and back-
ground probabilities,
p
bg
i
= max(w
i
+ v
i
,0.001)
p
f g
i
= max((1 − w
i
) − v
i
,0.001).
The maximum is required to avoid negativ probabili-
ties. In the next step these values have to be normal-
ized so that p
bg
i
+ p
f g
i
= 1 and afterwards the value w
i
can be replaced by p
bg
i
.
This process improves the results but is also com-
putational expensive, especially the calculation of the
average values c
bg
and c
f g
for every pixel in every
iteration for every frame. To reduce the runtime, In-
tegral Images (first introduced by (Viola and Jones,
2004)) are used to efficiently compute these values in
a static time, independent of the size of the square-
sized area over which these values are averaged. For
every channel two Integral Images have to be created,
one for the background pixels and one which only
adds up the foreground pixels. After calculating these
integral images the actual averages can be obtained by
a simple operation consisting only of three additions.
VideoSegmentationviaaGaussianSwitchBackgroundModelandHigherOrderMarkovRandomFields
541
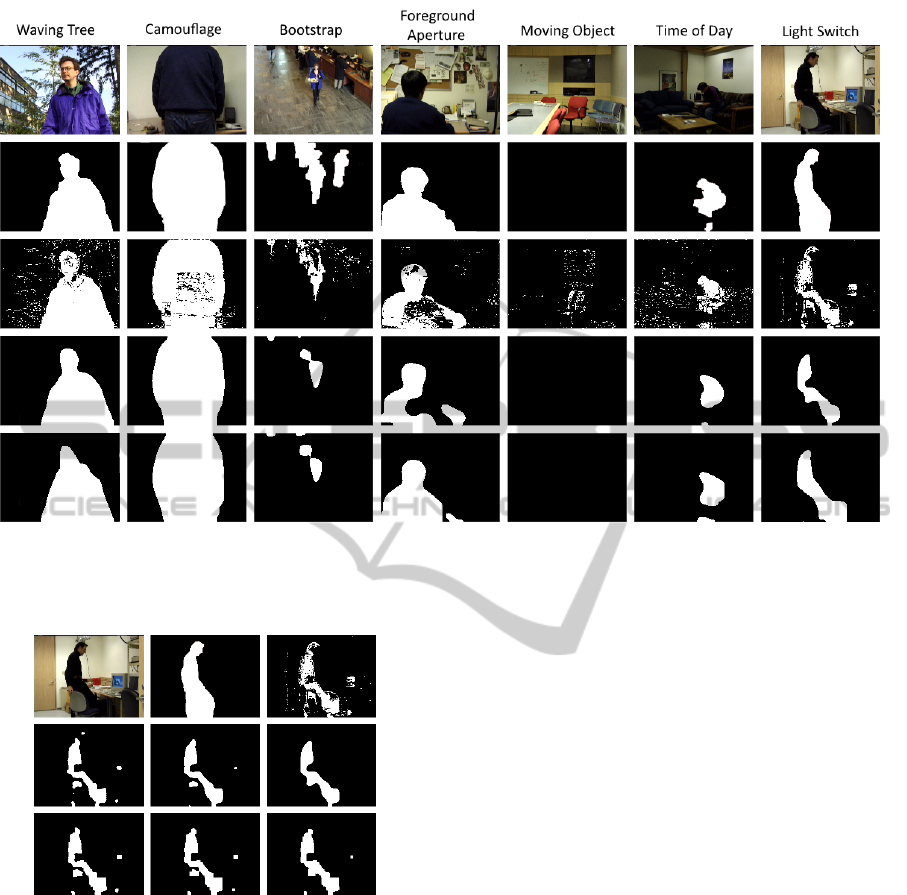
Figure 4: This figure depicts the results the proposed approach generated for the Wallflower data set. The first row shows the
images from the videos, the second row the corresponding ground-truth data, the next the results after the GSM algorithm,
the fourth row the results when the GSM is combined with the MRF (without the Between Class Variance) and the last row
shows the results of the final algorithm.
Figure 3: The first row shows the original picture, the
ground-truth data and the result after the GSM. In the sec-
ond row the results after the smallest clique Belief Propa-
gation algorithm with the Moore Neighbourhood, first and
second order GMN are depicted. The last row shows the
same for the maximal clique Belief Propagation.
4 RESULTS
To compare our algorithm with existing methods the
Wallflower data set (Toyama et al., 1999) is chosen
because various different methods were already eval-
uated with it. Each of the seven examples depicts one
unique problem of video segmentation which can be
assessed with the provided ground-truth data.
As only one size of cliques is taken into considera-
tion by the Belief Propagation, a comparison between
two algorithms which use different clique sizes is
made. One would only factor in the maximal cliques
and another only the smallest cliques (C
2
). Both al-
gorithms achieved considerable improvements of the
segmentation delivered by the Background Substrac-
tion and the extracted foreground regions are in gen-
eral smoother if the minimal clique method is used
(see Figure 3). For the final results the second or-
der GMN and the algorithm which used the smallest
cliques are applied.
The results for all video sequences and the three
stages of our approach with one set of parameters are
shown in Figure 4. It can be seen that the GSM alone
generates good segmentations but still has many sin-
gle false detections. A good example of this is the
segmentation of the Moving Object scene.
In general, these can be very good eliminated with
the MRF approach and only areas in which whole ob-
jects were not or falsly detected remain as errors (see
Bootstrap or Foreground Aperture). As the results
with the MRF are already quite good, the range of
improvement for the between Class Variance addition
to the Belief Propagation is limited. Nonetheless, it
enhances the overall results considerably, mainly by
expanding the foreground area if the surrounding pix-
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
542

Table 1: The results of different algorithms for the Wallflower data set. Each row shows the number of wrongly classified
pixels for one approach separated in false positives and false negatives.
Algorithm MO ToD LS WT C B FA Total
Single Gaussian FN 0 949 1857 3110 4101 2215 3464
(Wren et al., 1997) FP 0 535 15123 357 2040 92 1290 35133
Mixture of Gaussian (MoG) FN 0 1008 1633 1323 398 1874 2442
(Stauffer and Grimson, 1999) FP 0 20 14169 341 3098 217 530 27053
Kernel Density Estimation FN 0 1298 760 170 238 1755 2413
(Elgammal et al., 2000) FP 0 125 14153 589 3392 993 624 26450
MoG with PSO FN 0 807 1716 43 2386 1551 2392
(White and Shah, 2007) FN 0 6 772 1689 1463 519 572 13916
MoG in improved HLS Color Space FN 0 379 1146 31 188 1647 2327
(Setiawan et al., 2006) FP 0 99 2298 270 467 333 554 9739
MoG with MRF FN 0 47 204 15 16 1060 34
(Schindler and Wang, 2006) FP 0 402 546 311 467 102 604 3808
Gaussian Switch Model (GSM) FN 0 457 1636 244 829 1708 1567
this paper FP 466 641 543 736 164 166 561 9718
GSM with Belief Propagation (BP) FN 0 394 1789 113 208 2064 1686
this paper FP 0 40 289 156 13 3 414 7169
GSM with improved BP FN 0 321 1383 174 246 2081 469
this paper FP 0 199 695 356 66 0 92 6092
Independent Component Analysis FN 0 1199 1557 3372 3054 2560 2721
(Tsai and Lai, 2009) FP 0 0 210 148 43 16 428 15308
Nonnegativ Matrix Factorization FN 0 1282 2822 4525 1491 1734 2438
(Bucak and Gunsel, 2009) FP 0 159 389 7 114 2080 12 17053
Wallflower FN 0 961 947 877 229 2025 320
(Toyama et al., 1999) FP 0 25 375 1999 2706 365 649 11478
els have a very similar colour.
An assessment of the results can be seen in Table
1 where the number of pixels which were wrongly
classified are shown for all videos and many differ-
ent approaches. The upper part shows various meth-
ods which are all using Gaussians for modelling the
background. In the middle the results of our approach
are illustrated and in the lower part are some meth-
ods which use completlely different principles (non-
Gaussian) to model the background.
As the GSM method uses Gaussians for the back-
ground modeling it should be primarily compared to
the Single Gaussian or MoG approaches shown at the
top of the table. Although the GSM uses only two
Gaussians and is therefore not as memory consum-
ing as the MoG methods (which normally are tuned
to five or more Gaussians), it still does perform bet-
ter than almost all of them. Only one method could
generate better results than the GSM algorithm when
it was combined with the MRF and Otsu’s Method.
5 CONCLUSION
A new and efficient way to model the background of
a video with Gaussians is proposed and linked with a
novel voting mechanism. The updated model is sub-
tracted from every new frame and with a pixelwise
adaptive threshold a segmentation can be created. In a
second step the segmentation was improved by apply-
ing a higher order MRF on the generated data. There
several adaptations were applied to obtain a manage-
able model even with advanced neighbourhood sys-
tems. Lastly, the Belief Propagation algorithm used
to solve the MRF was extended by a process which
would change the underlying probability map based
on a local version of Otsu’s method.
The benefit of the approaches using the MoG
method should theoretically be mainly in cases like
the Waving Tree video, where background objects are
constantly in motion but do not become foreground.
In this case the different backgrounds per pixel can
be specifically modelled by the different Gaussians of
the MoG. In practice, the GSM algorithm performs
equally good there, although it only models one back-
ground per pixel.
The adaptions made to the MRF to simplify the
calculation of the MAP made it possible to use this
model on a today’s standard PC and still achieve sub-
stantial and reliable improvements of the segmenta-
tion. Furthermore, it is demonstrated that the local
version of Otsu’s Method can alter the segmentation
in a way that it aligns with the borders of the objects
in the given scene. Overall this new approach delivers
state of the art results in this well-studied subject.
VideoSegmentationviaaGaussianSwitchBackgroundModelandHigherOrderMarkovRandomFields
543

REFERENCES
Boykov, Y. and Funka-Lea, G. (2006). Graph cuts and ef-
ficient n-d image segmentation. International Journal
of Computer Vision, 70:109–131.
Bucak, S., Gunsel, B., and Guersoy, O. (2007). Incremental
nonnegative matrix factorization for background mod-
eling in surveillance video. In Signal Processing and
Communications Applications, 2007. SIU 2007. IEEE
15th, pages 1–4.
Bucak, S. S. and Gunsel, B. (2009). Incremental subspace
learning via non-negative matrix factorization. Pattern
Recogn., 42(5):788–797.
Cinar, G. and Principe, J. (2011). Adaptive background esti-
mation using an information theoretic cost for hidden
state estimation. In Neural Networks (IJCNN), The
2011 International Joint Conference on, pages 489–
494.
Elgammal, A. M., Harwood, D., and Davis, L. S. (2000).
Non-parametric model for background subtraction. In
Proceedings of the 6th European Conference on Com-
puter Vision-Part II, ECCV ’00, pages 751–767, Lon-
don, UK, UK. Springer-Verlag.
Felzenszwalb, P. and Huttenlocher, D. (2004). Efficient be-
lief propagation for early vision. In Computer Vision
and Pattern Recognition, 2004. CVPR 2004. Proceed-
ings of the 2004 IEEE Computer Society Conference
on, volume 1, pages I–261–I–268 Vol.1.
Huang, D.-Y., Lin, T.-W., and Hu, W. C. (2001). Au-
tomatic multilevel thresholding based on two-stage
otsu’s method with cluster determination by valley es-
timation. Journal of Information Science and Engi-
neering, 17:713–727.
Ising, E. (1925). Beitrag zur Theorie des Ferromag-
netismus. Zeitschrift f
¨
ur Physik, 31(1):253–258.
Kim, T.-K., Wong, K.-Y. K., Stenger, B., Kittler, J., and
Cipolla, R. (2007). Incremental linear discriminant
analysis using sufficient spanning set approximations.
In Computer Vision and Pattern Recognition, 2007.
CVPR ’07. IEEE Conference on, pages 1–8.
Li, X., Hu, W., Zhang, Z., and Zhang, X. (2008). Robust
foreground segmentation based on two effective back-
ground models. In Proceedings of the 1st ACM Inter-
national Conference on Multimedia Information Re-
trieval, MIR ’08, pages 223–228.
Liao, sheng Chen, T., and choo Chung, P. (2011). A fast
algorithm for multilevel thresholding. International
Journal of Innovative Computing, Information and
Control, 7(10):5631–5644.
Lin, H.-H., Liu, T.-L., and Chuang, J.-H. (2002). A proba-
bilistic svm approach for background scene initializa-
tion. In Image Processing. 2002. Proceedings. 2002
International Conference on, volume 3, pages 893–
896 vol.3.
Marghes, T., B., and R., V. (2012). Background modeling
and foreground detection via a reconstructive and dis-
criminative subspace learning approach. In Proceed-
ings of the 2012 International Conferecne on Image
Processing, Computer Vision and Patternrecognition,
pages 106–113.
Otsu, N. (1979). A threshold selection method from gray-
level histograms. Systems, Man and Cybernetics,IEEE
Transactions on, 9(1):62–66.
Schindler, K. and Wang, H. (2006). Smooth foreground-
background segmentation for video processing. In
Proceedings of the 7th Asian Conference on Computer
Vision - Volume Part II, ACCV’06, pages 581–590.
Setiawan, N. A., Seok-Ju, H., Jang-Woon, K., and Chil-
Woo, L. (2006). Gaussian mixture model in im-
proved hls color space for human silhouette extrac-
tion. In Proceedings of the 16th International Con-
ference on Advances in Artificial Reality and Tele-
Existence, ICAT’06, pages 732–741.
Stauffer, C. and Grimson, W. (1999). Adaptive background
mixture models for real-time tracking. In Proceedings
1999 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition Vol. Two, pages
246–252. IEEE Computer Society Press.
Sun, M., Telaprolu, M., Lee, H., and Savarese, S. (2012).
Efficient and exact map-mrf inference using branch
and bound. In Proceedings of the Fifteenth Interna-
tional Conference on Artificial Intelligence and Statis-
tics (AISTATS-12), volume 22, pages 1134–1142.
Toyama, K., Krumm, J., Brumitt, B., and Meyers, B.
(1999). Wallflower: Principles and practice of back-
ground maintenance. In Seventh International Confer-
ence on Computer Vision, pages 255–261. IEEE Com-
puter Society Press.
Tsai, D. and Lai, C. (2009). Independent compo-
nent analysis-based background subtraction for indoor
surveillance. In IEEE Trans Image Proc IP 2009, vol-
ume 18, pages 158–167.
Viola, P. and Jones, M. (2004). Robust real-time face de-
tection. International Journal of Computer Vision,
57(2):137–154.
White, B. and Shah, M. (2007). Automatically tuning back-
ground subtraction parameters using particle swarm
optimization. In Multimedia and Expo, 2007 IEEE
International Conference on, pages 1826–1829.
Wren, C., Azarbayejani, A., Darrell, T., and Pentland, A.
(1997). Pfinder: Real-time tracking of the human
body. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 19:780–785.
Xu, W., Zhou, Y., Gong, Y., and Tao, H. (2005). Back-
ground modeling using time dependent markov ran-
dom field with image pyramid. In Proceedings of
the IEEE Workshop on Motion and Video Computing
(WACV/MOTION’05) - Volume 2 - Volume 02.
Y. Wang, K.-F. L. and Wu, J.-K. (2006). A dynamic condi-
tional random field model for foreground and shadow
segmentation. IEEE Trans. Pattern Analysis and Ma-
chine Intelligence (TPAMI), 28:279–289.
Yedidia, J. S., Freeman, W. T., and Weiss, Y. (2003).
Exploring artificial intelligence in the new millen-
nium. chapter Understanding Belief Propagation and
Its Generalizations, pages 239–269.
Zhang, S., Yao, H., and Liu, S. (2009). Dynamic back-
ground subtraction based on local dependency his-
togram. International Journal of Pattern Recognition
and Artificial Intelligence, 23(07):1397–1419.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
544
