
Integrated Modeling of Road Environments for Driving Simulation
Carlos Campos
1,2
, João Miguel Leitão
1
and António Fernando Coelho
2
1
Department of Electrical Engineering, School of Engineering of Porto Polytechnic, Porto, Portugal
2
Department of Informatics Engineering, Engineering Faculty of Porto University, Porto, Portugal
Keywords: Procedural Modelling, Road Network, Road Layout, Road Design, Driving Simulation.
Abstract: Virtual environments for driving simulations aimed to scientific purposes require three-dimensional road
models that must obey to detailed standards of specification and realism. The creation of road models with
this level of quality requires previous definition of the road networks and the road paths. Each road path is
usually obtained through the dedicated work of roadway design specialists, resulting in a long time
consuming process. The driving simulation for scientific purposes also requires a semantic description of all
elements within the environment in order to provide the parameterization of actors during the simulation
and the production of simulation reports. This paper presents a methodology to automatically generate road
environments suitable to the implementation of driving simulation experiences. This methodology integrates
every required step for modelling road environments, from the determination of interchanges nodes to the
generation of the geometric and the semantic models. The human supervisor can interact with the model
generation process at any stage, in order to meet every specific requirement of the experimental work. The
proposed methodology reduces workload involved in the initial specification of the road network and
significantly reduces the use of specialists for preparing the road paths of all roadways. The generated
semantic description allows procedural placing of actors in the simulated environment. The models are
suitable for conducting scientific work in a driving simulator.
1 INTRODUCTION
Procedural modelling of realistic road environments
is a research area of great interest, which is
dedicated to generating 3D models, not only for
entertainment but also for scientific applications.
This paper presents the current implementation state
of a methodology for the automatic creation of road
environments for driving simulation for scientific
purposes.
Driving simulators are an important research tool
in several scientific areas, such as psychology,
ergonomics and roadway engineering.
In psychology, they are used to develop
researches related with the driver behaviour. For
example, evaluate the interference of secondary
tasks in principal driving task, like mobile phones,
navigation systems or traffic information systems.
The driving simulators are also used in
ergonomics area to study "In Vehicle Information
System", of interaction with the driver, like
navigation systems (GPS) or mobile phones.
In roadways engineering, they are used to
analyses road paths in design stage, but also real
roads, allowing the test with real drivers, for
example the study of factors that conducts to
dangerous driving.
In traffic engineering also allow the study of
dangerous overtaking maneuver with frontal
collision probability in roads with two lanes, one in
each direction, without compromise the driver
safety.
Driving simulation experiments require the
creation of extensive road environments with
specific technical features, such as the placement of
actors and the production of detailed reports. In
order to place the actors in the simulated
environment and produce the reports, a semantic
description of the entire generated environment is
also required.
Road environments for driving simulation
usually consist of road networks. The strategic
design of a road network involves the previous
definition of nodes (cities, intersections,
roundabouts, etc.) that will be interconnected and the
type of road to implement.
This definition often involves very different
70
Campos C., Leitão J. and Coelho A..
Integrated Modeling of Road Environments for Driving Simulation.
DOI: 10.5220/0005308600700080
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 70-80
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

disciplines, in addition to the roadways design, and
requires an analysis of the network as a whole.
This process produces the topological definition
of the roads network, that specifies the connection
between nodes and the related typologies of roadway
(highway, secondary roads and rural). The highways
connect cities, secondary roads connect cities with
small towns, and rural roads connect small towns
with villages.
The creation of this road network definition can
become a too hard-working and resource consuming
task, if done by specialists applying traditional
roadway design methods. These difficulties cannot
be completely solved by the use of any of the
available dedicated tools, like the Autodesk Civil3D.
The road path definition is very important to the
realism of the road environment. The road path
should have geometric characteristics like those
found in the real world.
After obtaining the road path, it is still necessary
to generate the visual model. One way to optimize
this process is to use automatic modelling tools to
facilitate this task, like the ones presented in
(Campos, 2007).
Additionally, besides generating the model of the
network and the related road paths, it is still
necessary to edit the terrain model surrounding each
road path that makes up the roads network, to
produce models that meet the required visual
quality.
For driving simulation experiments, the required
high fidelity visual models must also be completed
with the corresponding semantic description of the
entire virtual environment, as also pointed out in
(Thomas, 2000).
The semantic definition is a high-level
description and characterization of the road
environment, which allows parameterizing the
dynamic model of the virtual environment. This
description is fundamental in simulation systems for
placing actors (e.g. pedestrians, other vehicles),
monitoring the entire simulation and report
generation. The availability of this reports and the
details included are very important in scientific
driving simulation experiments. These reports are
essential for further analysis and data processing
relating to experimental test. Traditional modelling
tools for virtual environments do not allow the joint
creation of these two representations, semantic and
visual.
To allow the generation of fully controllable
environments, the preparer of the experiment must
be able to interact with the generation process, by
imposing specific requirements for each element.
This feature is critical in the generation of virtual
environments for driving simulation for scientific
purposes.
In this paper, section 2 presents the state of art in
the generation of road environments and the relevant
related work. The proposed methodology is
presented in section 3, and in section 4 we present
the results obtained with the implemented prototype.
Section 5 presents the conclusions and proposes
some guidelines for future work.
2 STATE OF ART
2.1 Roads Design
As described in (Campos, 2012), a road network can
be defined by a set of nodes and links that connect
them. Each road is planned to connect two or more
points of interest, allowing the movement of
vehicles between them. Planning a road network
aims to satisfy the needs of people, seeking to meet
the standards of service levels. A road network can
be defined by a hierarchical structure of connections
in 3 levels: the highway network, the secondary road
network and rural road network (Teoh, 2008)
(Weber, 2009).
The design of a road starts with a strategic
decision to connect two points on the existing roads
network. Essentially, this decision is made by taking
into account parameters such as population growth,
level of service, traffic studies and estimated
construction cost.
In roadway engineering, a project of a road path
is developed according to the following phases:
preliminary program, prior study and project of
implementation (França, 2011). The preliminary
program is basically a specification consisting of
general rules, with little detail, which include the
general characteristics desired and that may
condition the choice of road path.
The preliminary study is not intended to provide
definitive elements, nor the detail required for the
road works. The main objective is to point out one or
several alternative solutions for tracing the road
path. This stage involves traffic studies, geological
and geotechnical studies, landscape and
environmental impact studies. The results of these
studies will restrict the road path of the roadway, but
leaving some degrees of freedom to a further
decision. When the previous study is concluded and
approved, the project of road path begins. The route
is now defined with necessary detail to its
implementation in the real world. The definition of
IntegratedModelingofRoadEnvironmentsforDrivingSimulation
71

the horizontal alignments of the road is the first task
to be performed in this step, followed by the
remaining specialities.
In order to produce the horizontal alignments,
one begins by specifying the centreline, with the
introduction of horizontal curves. It follows the
vertical alignment (altimetry), where vertical curves
are defined. Lastly, the road cross-section specified.
The road path definition must conform to the rules
established by the applicable standards design. In
Portugal, these standards are defined by Estradas de
Portugal, which is responsible for maintaining the
road network (EP, 1994).
2.2 Related Work
Several works have been developed for creating road
city environments, focusing mainly on urban layout
(Parish, 2001)(Chen, 2008)(Teoh, 2008)(Coelho,
2007)(Vanegas, 2010).
Typically, the produced networks of urban roads
follow a certain predefined pattern: orthogonal,
radial or branching (Sun, 2002). The results obtained
by these methods are usable for most visual
simulation applications. The problem with these
approaches is the need for an excessive control by
the user to obtain realistic models. Also, the use of a
pre-defined pattern for the road network is not
adequate when specific road layouts are required.
Besides, these methods don’t produce extra-urban
roads network.
Procedural modelling languages, e.g. L-systems
and CGA shapes, are not adequate to produce
extensive road paths for driving simulation (Paris,
2001)(Muller, 2006)(Coelho, 2007). Is known that
the driver easily learn the road layout in an
experimental work, therefore repetition of road
segments is not advisable. The expectation
component of the road path is a very important
variable in a driver behaviour research.
Driving simulation experiments typically require
mixed road environments, with roads models of
good quality, with realistic road paths, combining
roads from urban and rural environments.
A proposal for the procedural modelling of
virtual environments suitable for real-time
simulation is presented by Smelik et al. in 2008
(Smelik, 2008). The authors describe a process in
which the virtual environment is created
hierarchically from an initial sketch, including
treatment of the road network. A benefit of this
hierarchy is that each layer can be treated
individually and the final model generation process
takes into account the appropriateness of all settings,
including the terrain model, as discussed in (Latham,
2006). In the proposal presented by Smelik et al., it
isn’t clear what methodology was used to generate
the road path. In a further publication in 2001,
Smelik et al. present a modelling approach of a
virtual environment, using an interactive modeller
(Smelik, 2011). The generation of the virtual
environment requires an excessive control by the
user so that the process ceases to be fully automatic.
For the generation of geometric models of roads,
some procedural modelling techniques of urban
networks presented by Kelly et al. in 2008 are
explored (Kelly, 2008).
Galin et al. present a methodology for procedural
generation of roads paths, where the generation of
the road path is done using a complex algorithm, on
a terrain defined as a digital elevation map (Galin,
2010). At each step of the process the direction to
follow is determined by the local evaluation of the
cost of each alternative. This use of a local
assessment prevents a proper evaluation and global
optimization of the final solution. Depending on the
terrain model and the typologies of the road, the
option for a maximum number of alternatives to be
study may be too complex. The presented
description does not allow to concluding if the
proposed method produces road layouts similar to
those found in real road paths. The realism
evaluation of the obtained models is also not
presented. During the generation of the visual
model, all 3D models, such as bridges, tunnels and
road crossings are instantiated.
A methodology for generating a road network
that integrates different typologies of roads
(highways, main roads and secondary roads) is
presented by Galin et al. in (Galin, 2011). The
generation of the global transport network is
initiated by the creation of the motorway network,
followed by the main network and the secondary
network last. Each type of roads is created
independently. At the end, all the roads are
overlapped in a single road network. The way this
problem is handled, requires that the design of roads
has to be recalculated.
Thomas et al. showed a model implementation of
a virtual city where several actors (like pedestrians,
vehicles and public transport vehicles driven by
other drivers circulating in different directions) are
included and controlled over the complex urban road
environment (Thomas, 2000). The urban
environment was created using the interactive
modeller VUEMS and based on a terrain definition
in a digital elevation map (Donikian, 1997). The use
of an interactive modeller is not suitable for the
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
72

generation of extensive road environments
automatically and efficiently.
In the work presented by Bayarri et al.,
methodologies for the generation of road
environments appropriate for driving simulation
from design data are described (Bayarri,
1996)(Pareja, 1999). Each time you want to get a
model of a roadway, it requires prior interaction with
the area of engineering of roadways, or other
sources, for the delineation of the road paths. Some
of these methodologies have been explored in
previous works (Campos, 2007).
In order to implement experiments in driving
simulation, beyond the generation of road layout and
modelling of virtual environments, the
corresponding semantic definition should also be
created. As mentioned in (Thomas, 2000), the
semantic definition is a description of the
characterization of high-level road environment,
which supports the dynamic model of the virtual
environment. The creation of a semantic description
in accordance with the road map is also addressed in
other works (Campos, 2007)(Bayarri, 1996)(Pareja,
1999).
The OpenDrive Project has developed a standard
for the complete description of a road network to be
compatible with various simulation systems
(OpenDrive, 2010). It is stated that the proposed
standard allows the parameterization of the main
features of real roads. An interactive modeller that
uses this standard is the Road Designer (ROD,
2011).
Creating models of realistic roads for driving
simulation is usually performed by manual,
laborious and slow processes, even when the
available interactive tools are applied. Whenever a
realistic road environment to driving simulation
experiments is needed, a high level of interaction
with the preparer is usually necessary, which
requires experts in road design. An alternative to this
problem is to develop a methodology for automatic
generation of road environments, from the definition
of nodes, topological definition of the network,
generation of road paths and semantic description
until the generation of the visual model.
3 INTEGRATED MODELING OF
ROAD ENVIRONMENTS
The proposed methodology creates, in an integrated
way, a complete road environment from the
generation of inter-changes nodes to the construction
of the three-dimensional model. The process of
generating the three dimensional model is organized
hierarchically in layers, which also gives a semantic
description of the road environment, as illustrated in
figure 1.
Figure 1: Overview of process workflow.
The preparer of the road environments can interact
at any stage of the model generation process, in
order to customize the final result. This allows a
complete control over each process and the
production of models with the specific required
details.
In this approach, the procedural generation of a
road environment starts at the Nodes module, which
creates a definition of interconnection nodes on a
given area of terrain. This module has, as input
parameters, the definition of the area where the
nodes will be distributed and the number of nodes
that will be generated.
The terrain model can be associated with a
definition of constraints that should be considered in
the generation of nodes. In the produced list of
nodes, each node is associated with its location and
an importance factor. The importance factor can
then be used to organize the nodes by typology.
The Topological Roads module is aimed in
generating a definition of a topological road
network. The topological road network is created
hierarchically by levels, similar to what happens in
other works (Teoh, 2008)(Weber, 2009)(Galin,
2011). The Topological Roads module receives as
input the definition of nodes generated by the Nodes
module and, depending on the importance factor,
organizes the nodes by typologies: cities, towns and
villages. Based on this organization, the topological
definition of each network is created. The secondary
network is originated from town typed nodes, and
the rural network is created from the village nodes.
IntegratedModelingofRoadEnvironmentsforDrivingSimulation
73

Thus, highways connect cities, secondary roads
connect cities and towns, and rural roads connect
towns and villages. Additional nodes of inter-
connection may be created, with an importance
factor of zero.
The Centerline module is responsible for
generating the definition of road paths for each
roadway in the network. This module receives the
definition of the topological road network generated
by the Topological Roads module. For each
connection, a definition of the road path is created.
The methodology of generating a road path was
inspired by the methods used in roadways
engineering, producing models that meet the design
standards and with geometric characteristics similar
to those found in real world.
The suitability of the terrain model to the
generated road network is performed by Road
Enviro module. This module receives the definition
of the road paths of all the roadways generated by
the Centerline module and fits the terrain model to
the respective geometric definition of each roadway.
The Models Generator module is responsible for
procedurally generating the geometric model of the
roadways, where the previously studied techniques
are explored (Campos, 2007). This module is also
responsible for generating the geometric model of
the terrain.
In the hierarchical process of generating a road
environment, the preparer of the model can interact
at any stage of the process, modifying the result
produced by any module and creating a custom
layout. For example, the preparer can add new
nodes, edit or delete a connection, redefine a road
path or edit the definition of the terrain.
This freedom of interaction with the model at
any stage of the generation process is a special
contribution of this methodology that enables
producing fully customized models, allowing fulfil
of any particular specification required for the
experimental work.
At the end of the generation process, the
semantic description is also made available, which
allows the parameterization and placement of actors
in the simulated environment, e.g. other vehicles,
pedestrians or any other moving element. This
facility is crucial for implementing driving
simulation experiments aimed to scientific purposes.
3.1 Nodes and Topologic Roads
Network
The proposed methodology to create a topological
road network requires the previous definition of the
interchange nodes set. If there is no previous
definition of these nodes, the Nodes module is able
to automatically generate a simplified definition of
nodes on an area of terrain, in which each node is
associated with an importance factor. The
importance factor can match the population and is
used to organize the nodes by typology. The nodes
are organized into three typologies: city, town ad
village. Once the definition of nodes is available,
different topological roads networks are created:
highways, secondary and rural.
The process starts from nodes of city typology,
creating a network of highways. All possible
connections linking a pair of cities are analysed and
the benefit of its existence is evaluated. During the
review process, the decision to remove a connection
depends on the difference between the cost of road
construction and the benefit of keeping that
connection. The benefit is related to the utilization
index (U), which depends on the total length of the
roadway (L) and the population resident in each of
the ends nodes, PA and PB (1).
U = PA * PB / L
2
(1)
The benefit (B) is determined according to the
utilization index U, the difference between the road
connection length and the shortest alternative route,
and the unitary cost of operation (Cop), which
measures the traveling cost of vehicle per kilometre
(2).
B = U * (L
connection
- L
shortest
) * C
op
(2)
If an edge connection of the graph is removed, the
cost of this decision makes the movement between
the ends nodes may be longer, what don’t match a
particular problem.
After simplifying the roads network, there can be
many intersections between two road paths. In this
case, additional interconnection nodes are generated.
These nodes have an associated importance factor
(population) of zero. Interconnection nodes with
zero population appear as gray nodes in figure 2.
In order to generate the secondary road network,
the nodes with village typology are added to the
highways network obtained in the previous process.
All possible connections between villages and towns
are then analysed, using the same procedure applied
to the highway network.
The process of generating the topological roads
networks may be parameterized in order to obtain a
representation of highways, adequate and similar to
a real roads network. At the end of the process, we
obtain a definition of the network of connections,
between two nodes, as shown in figure 2.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
74
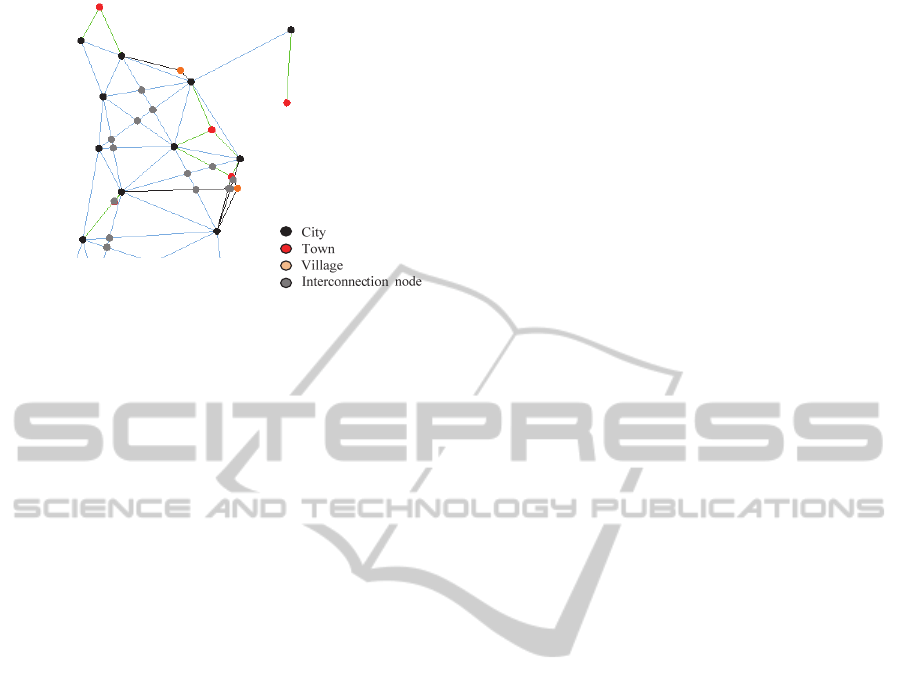
Figure 2: Topological roads network.
After obtaining the definition of the topological
roads network, a road path is generated for each
roadway.
3.2 Road Paths
As described in (Campos, 2014), the selection of a
road path (T) connecting two given nodes (a and b),
can be explained by an optimum search function
aimed to minimize a cost function that evaluates the
influence of different indicators, such as the
relationship with the terrain definition and the
constraints.
The proposed procedure for generating a road
path is hierarchically organized in layers. Starting
from the definition of a connection between two
nodes, a set of high level solutions with little detail
is first generated in the first layer. At each layer,
new road layout definitions with growing levels of
detail are generated.
At each layer, several alternatives road paths are
generated. The choice of the best hypothesis at each
layer is performed by a cost function that evaluates
several parameters, such as terrain affection and the
related constraints.
The strategy of generating a road path according
to a specific level of detail mimics the method
usually applied by civil engineers when designing
road path of real roadways. This straight connection
to real design processes eases the selection of every
required parameter and grants that the produced
output will be similar to a real road path. Once the
road path is defined in straight alignments with the
required level of detail, the horizontal alignments
and the altimetry layout are developed. Horizontal
alignments are achieved with the introduction of
horizontal curves and the development of the in with
the introduction of vertical curves. A horizontal
curve consists in an input clothoid, a circular arc and
an output clothoid.
The produced definition of the road path includes
information about every road segment and its
construction class as normal road, bridge or tunnel.
The costs considered in the evaluation of a road path
are: classified area, bridge construction, tunnel
construction, earthwork, roadway construction and
cost of use. A classified zone is defined as a
geographical area in blueprint that represents a
particular constraint, such as water, forest or
buildings.
To determine the impact of a road path on a
classified zone it is necessary to calculate the area of
the zone affected by the road crossing. To determine
whether a portion of the length of the roadway is
built as a bridge or tunnel, an analysis of the
difference between the elevation of the terrain and
elevation of the roadway is made. It’s also
considered the bridge construction where the
roadway crosses water, for example, a river or a
lake.
To evaluate the moved ground volume it is
necessary to analyse the difference between
elevations of the terrain and the road. The reference
values for the costs analysed in the study of
alternative alignments were determined using
specialists in roadways design, and are discussed in
(Campos, 2014).
3.3 Road Environment
The construction of roadways in real world implies
earthworks in the terrain where the road is
implemented. A slope is the terrain surface which is
located along the road and can be originated by
natural or artificial causes. Artificial slopes are
created during construction of roads and are a result
of excavation or embankment on the terrain. They
are aimed to ensure the stability of the natural
terrain. The declivity of cut slopes and embankment
slopes are defined according to geological and
geotechnical studies. Generally, the cut slope and
embankment slopes have declivity of 1 to 1.5 (V/H)
so that the stability of the ground is guaranteed (EP,
1994).
In the proposed methodology, after generating
the trajectory of the road, it is necessary to adjust the
definition of the terrain to generate the visual model
without failures. These changes to the altimetry of
the terrain model typically result in cut and
embankment slopes.
An efficient way to realize the change in the
altimetry of the terrain consists in, for each point of
the terrain, checking if the altimetry value is
IntegratedModelingofRoadEnvironmentsforDrivingSimulation
75

influenced by the presence of the road. For each
point of the terrain, the minimum distance to the
road is calculated and, according to this distance, the
need to change the z coordinate of the point of
terrain evaluated. This process may result in the cut
or embankment slopes, as shown in figure 3.
The z coordinate of the point of the terrain is not
altered if it is positioned between the definitions of
slopes, as illustrated in figure 3, for the point P3.
We can also see in figure 3 that point P1 is
shifted to P'1 point, and the point P2 is shifted to P'2
point.
Figure 3: Cut and embankment slope.
In order to optimize this process, the terrain points
that are relatively far are not treated. In the edition of
the terrain, the modelling information of the edited
areas is registered so that, it is possible to provide
these areas with a different color (typically brown)
during its visualization.
The horizontal signalization is made by road
marks, defining the lanes in each road segment.
These marks may have different layouts: continuous,
discontinuous or both. In order to improve the
visibility detection, horizontal signalization models
are hierarchically organized with the road models
using different layers. The vertical signalization is
placed in road environment by instantiating 3D
objects.
In this way the road environment is procedural
modelled, producing 3D models that meet the
detailed standards of specification and required
visual quality.
3.4 Semantic Model
During the creation of a road environment, a
semantic description of the entire model is
generated. This description is fundamental in driving
simulators aimed to scientific purposes, not only for
the production of reports, but also for the
parameterisation of actors and traffic events. The
inclusion of actors and the parameterisation of traffic
events make the driving experience more realistic
and immersive.
In driving simulation, typically road
environments are enriched with the placement of
actors, such as other vehicles and pedestrians. In
driving simulation experiments where the objective
is to study the behaviour of the drivers, the
placement of other vehicles and specification of
precise traffic events is normally required.
In order to place actors and allow the
specification of traffic events, some other levels of
information beyond the definition from the
centerline must also coexist. These include data such
as the roadway width, the width of the road sides,
the number of lanes, the width of each lane and the
road signs.
4 RESULTS
The results presented in section 3.1 were obtained by
the prototype implemented applying the
methodology described in this paper. To
demonstrate the quality of the results obtained by
this methodology and provide a critical analysis, the
following case study was prepared:
The aim of this implementation was to get the road
environment corresponding to two typologies of
roads (rural and highway) for a connection without
nodes, between two cities (Porto and Braga) of the
topological road definition generated, presented in
section 3.1.
The population of Porto is 273 584 inhabitants
and a population of Braga is 93587 inhabitants.
Population was used as an approximation for the
importance factor.
The rural road was designed for a base speed of
60 km/h with two lanes, one in each direction,
corresponding to a total reference width of 12m. The
highway was designed for a base speed of 120 km/h,
with two carriageways, one in each direction, with
two lanes each, corresponding to a total reference
width of 40m.
The model of the real terrain was obtained from
a digital elevation map in GEOTTIF format, from
the United States Geological Survey repository
(USGS, 2014). The constraints due to water and
forest were set to a geographical area affected by the
road layout. In this implementation, the areas that
represent constraints were defined in an image file in
the TIFF format (Libtiff, 2014).
The applied methodology produces several
definitions of the road path, with an increasing level
of detail. The image in figure 4 shows the road path
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
76

generated in straight alignments (black) and the
horizontal alignments, resulting after the
introduction of horizontal curves (blue).
Figure 4: Design of road path.
In figure 5, we present the produced road layout in a
3D view.
Figure 5: Road layout in a 3D view.
It is expected that the road path of a highway is less
winding when compared to a road path designed for
a lower base speed, in order to provide greater
comfort to the driver. Typically, the sinuosity of
horizontal alignments on highways is smaller than
the sinuosity on a rural road. This feature is also
observed in the altimetry layout. One way to analyse
the sinuosity of the horizontal alignment is to use the
discrete Fourier transform and perform an analysis
on the curvature domain. By comparing the results
obtained in the curvature domain of procedurally
generated models to real road paths, allows
concluding that the road paths generated by the
proposed methodology are similar to those found in
real world, like has discussed in (Campos, 2014).
Using the obtained road layout, the terrain model
is modified, in order to generate the corrected visual
model. This terrain correction is performed by a
specially developed module.
In figure 6, we present a rural roadway
environment, designed for a base speed of 60 km/h.
In the figure 7, we present the road environment
of highway, designed for a base velocity of 120
km/h.
Figure 6: Rural road environment.
Figure 7: Highway road environments.
The inclusion of others vehicles can be placed in the
simulated environment, in a procedural way. As we
can see in figure 6, 7 and 8, others vehicle are
procedural placed in the road environment.
IntegratedModelingofRoadEnvironmentsforDrivingSimulation
77

In figure 8, we show the resulting visual model
with a perfect fit between the generated road and the
surrounding terrain, where we can see cut and
embankment slopes.
Figure 8: Cut and embankment slopes.
Horizontal signs are made by road marks in the
surface of the roads and the vertical signalization are
placed in the road environment instancing 3D
Figure 9: Horizontal and vertical signalization.
models, as we can see in figure 9.
A special characteristic of our approach is the
efficiency and control, to produces tridimensional
models, since the topological road network
definition and the road paths of all roads. In table 1,
we present the time measured to obtain a topological
road definition by our method, with different
number of input nodes.
Table 1: Total number of nodes (city, town, village, and
interconnection nodes), total length of the roads, time (in
seconds) to generate de topological road definition.
Total
Nodes
Cities Towns Villages Total
Length
Time
142 25 16 15 7620 11
342 25 16 15 12166 76
30 18 0 0 3719.2 2
The trajectory of the roads can be controlled by
modifying the parameters of the cost function
(section 3.2). In table 2, we present the time
measured to obtain road paths with different lengths.
Table 2: Length of the road (in kilometres), time (in
seconds).
Length
(km)
Design by
specialists
Time
1000 1 day 3.42
10000 12 days 19
50000 3 months 52
Making an analysis in terms of time, it is concluded
that the proposed method compared to recent
methodologies presented by Galin et al. in 2010
(Galin 2010), significantly reduces the time required
to generate road paths (15%), maintaining the
required standards of realism. This time reduction is
more significant in extensive road paths (> 50 km)
or in a generation of a large road network,
independently of the terrain grid size.
5 CONCLUSIONS
Realistic driving simulation experiments require
prior preparation of models of road environments
correctly designed, with similar characteristics to
those found in real roads. Some experiments also
require models that are recognizable as roads from
the specific simulated country or region. The
presented methodology allows the automatic
generation of any type of road environment suitable
for driving simulation. It integrates all the road
construction stages, from the definition of
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
78

connecting nodes to the visual model.
The proposed generation process of road layouts
was inspired in methods used in roadways
engineering, producing roads according to standards
and similar to those found in the real world. This is a
special contribution of the presented work, that
allow minimize the use of specialists for preparing
the road paths. The introduction of horizontal curves
and vertical curves in altimetry are two prominent
factors that contribute to the realism of the road
paths obtained.
The problem of generating road paths between
two points is globally analysed, at different levels of
detail. The final alignment solution generated at
each level of detail is determined using the
calculation of several costs, by evaluating the
relation with the terrain and related constraints, the
cost of construction and the cost of use. The cost of
use depends with the variation in road layout
altimetry (∆z) and the utilization index (section 3.1).
Throughout the automatic generation process, the
road layout is successively refined, producing
definitions of roadways with the detail required to
generate the visual models.
The designed methodology allows obtaining a
wide range of road layouts, dramatically reducing
work and costs involved in its conception, as it
significantly reduces the use of road design
specialists to obtain the road network definition as
shown by results presented in this paper.
The proposed method eases the inclusion of
actors in the simulated environment. This
improvement is an innovative contribution to the
automatic generation of realistic road environments.
A major area of application of this methodology is
the generation of road environments that are suitable
for driving simulation, allowing the realization of
scientific studies in several science areas.
In the near future it will be possible to present
resulting road environment to road design experts, in
order to best validate the road paths obtained.
ACKNOWLEDGEMENTS
This work had the special contribution of supervisor
of the traffic analysis laboratory, where the driving
Simulator DriS is implemented, Prof. Dr. Carlos
Rodrigues of Civil Engineering Department of
FEUP, and Prof. Ângelo Jacob of Civil Engineering
Department of ISEP.
The Media Arts and Technologies project
(MAT), NORTE-07-0124-FEDER-000061, is
financed by the North Portugal Regional Operational
Programme (ON.2 – O Novo Norte), under the
National Strategic Reference Framework (NSRF),
through the European Regional Development Fund
(ERDF), and by national funds, through the
Portuguese funding agency, Fundação para a Ciência
e a Tecnologia (FCT).
REFERENCES
Bayarri, S; Fernadez, M; Perez, M, 1996. Virtual Reality
for driving simulation, Vol. 39, n.º 5, Communications
of the ACM.
Campos, C.; Leitão, J.; Rodrigues, C.; 2007. Modelação
de Ambientes Rodoviários de Grandes Dimensões,
15.º Encontro Português de Computação Gráfica.
Campos, C., Leitão, J., Coelho, A.; 2012. Modelação
Procedimental de Ambientes Rodoviários para
Simulação de Condução, 20.º Encontro Português de
Computação Gráfica.
Coelho, António; Bessa, Maximino; Sousa, A. Augusto;
Ferreira F. Nunes; 2007. Expeditious modeling of
virtual urban environments with geo spatial L-
systems; Computer Graphics Forum, Vol. 26, N. 4, pp.
769–782.
Campos, C., Leitão, J., Coelho, A.; 2014. Geração
Procedimental de Traçados Rodoviários para
Simulação de Condução, 21.º Encontro Português de
Computação Gráfica.
Chen,G.; Esch,G.; Wonka,P.; Muller,P.; Zhang,E., 2008.
Interactive Procedural Street Modeling, ACM
SIGGRAPH.
Donikian, S., 1997. VUEMS: A Virtual Urban
Environment Modeling System, Computer Graphics
International, Proceedings. IEEE, p. 84-92.
EP, 1994. Book of Road path Standards, Junta Autónoma
das Estradas, Estradas de Portugal (EP), ISBN-96379-
6-2.
França, A., 2011. Book of roadways, Civil Engineering
Department of Engineering Faculty of Porto
University.
Galin, E.; Peytavie, A.; Maréchal, N.; Guérin, E., 2010.
Procedural Generation of Roads, EUROGRAPHICS,
Volume 29.
Galin, E.; Peytavie, A; Guérin, E.; Benes, B., 2011.
Authoring Hierarchical Road Networks, Pacific
Graphics, Volume 30.
Kelly, G.; McCabe, H., 2008. Citygen: An Interactive
System for Procedural City Generation. GDTW, UK.
Latham, R.; Burns, D., 2006. Dynamic Terrain
Modification Using a Correction Algorithm, IMAGE
2006 Conference Scottsdale, Ari-zona.
Libtiff, 2014. TIFF Library and Utilities, available at
http://www.libtiff.org.
Muller, p.; Wonka, p.; Haegler, S; Ulmer, A.; Gool, L.;
2006. Procedural Modeling of Buildings, ACM
SIGGRAPH.
OpenDRIVE, 2010. OpenDRIVE Format Specification
rev 1.3, available at www.opendrive.org/docs/
IntegratedModelingofRoadEnvironmentsforDrivingSimulation
79

OpenDRIVEFormatSpecRev1.3D.pdf.
Pareja, I.;Bayarri, S.;Rueda, S., 1999. Modelado de
calidad para la visualizacióninteractiva de carreteras,
IX Congresso de Engenharia Informática.
Parish, Y.; Muller, P., 2001. Procedural Modeling of
Cities; ACM Computer Graphics (Proceedings of
SIGGRAPH’2001), pp. 301-308.
ROD, 2011. Road generation tool, available at
http://www.vires.com/Products_Ted.htm.
Smelik R. M.; Tutenel T.; Kraker K.J.; Bidarra R., 2008.
A Proposal for a Procedural Terrain Modelling
Framework, EGVE Symposium.
Smelik, R., Tutenel, T., Kraker, J, Bidarra, R., 2011. A
declarative approach to procedural modeling of virtual
worlds, Computer& Graphics Journal, Elsevier.
Sun, J.; Baciu, G.; Yu, X.; Green, M., 2002. Template-
Based Generation of Road Networks for Virtual City
Modeling, VRST’02, pp 33-40, NY USA.
Teoh, S., 2008. Algorithms for the Automatic Generation
of Urban Streets and Buildings, Proceedings of the
International Conference on Computer Graphics and
Virtual Reality (CGVR'08).
Thomas, G. and Donikian, S., 2000. Modelling Virtual
Cities Dedicated to Behavioural Animation.
EUROGRAPHICS 2000, vol. 19(3).
USGS, 2014. United States Geological Survey, available
at earthexplorer.usgs.gov.
Vanegas, C. A., Aliaga, D. G., Wonka, P., Müller, P.,
Waddell, P., & Watson, B. 2010. Modelling the
appearance and behaviour of urban spaces. In
Computer Graphics Forum (Vol. 29, No. 1, pp. 25-42).
Weber, B.; Müller, P.; Wonka, P.; Gross, M., 2009.
Interactive Geometric Simulation of 4D Cities,
Eurographics, vol. 28.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
80
