
Point Cloud Structural Parts Extraction based on Segmentation Energy
Minimization
Bruno Cafaro, Iman Azimi, Valsamis Ntouskos, Fiora Pirri and Manuel Ruiz
Department of Computer Science, “Sapienza” University of Rome, Via L. Ariosto, 25, Rome, Italy
Keywords:
Point Clouds, Level Set Methods, Minimal Surface Energy, Segmentation, Meshing.
Abstract:
In this work we consider 3D point sets, which in a typical setting represent unorganized point clouds. Segmen-
tation of these point sets requires first to single out structural components of the unknown surface discretely
approximated by the point cloud. Structural components, in turn, are surface patches approximating unknown
parts of elementary geometric structures, such as planes, ellipsoids, spheres and so on. The approach used
is based on level set methods computing the moving front of the surface and tracing the interfaces between
different parts of it. Level set methods are widely recognized to be one of the most efficient methods to seg-
ment both 2D images and 3D medical images. Level set methods for 3D segmentation have recently received
an increasing interest. We contribute by proposing a novel approach for raw point sets. Based on the motion
and distance functions of the level set we introduce four energy minimization models, which are used for
segmentation, by considering an equal number of distance functions specified by geometric features. Finally
we evaluate the proposed algorithm on point sets simulating unorganized point clouds.
1 INTRODUCTION
This work is focused on 3D point cloud analysis.
These are geometric data sets in which only the digi-
tized 3D points are usually available. Such low-level
data exhibits a huge gap with a high-level representa-
tion, which is necessary in many application areas as:
surface compression, shape classification, hybrid ren-
dering, meshing or simplification. We define simple
scene elements, to extract their structural parts, rely-
ing only on the raw point cloud. The proposed frame-
work is based on energy minimization using Level Set
and the construction of specific distance functions us-
ing local geometric features, such as normals, surface
variation and height of points. The novelty is due to
the contextually guided mesh construction, which ap-
proximates the minimal surface energy of the consid-
ered structural components. More precisely, the pro-
posed approach forms a mesh from a set of points
only if these points share common local geometric
features. Here we assume that structural parts of a
simple scene element can be characterized by com-
mon geometric features values. Iteratively repeating
the mesh construction for each structural part, seg-
mentation is obtained, as can be seen in Figure 1.
The level set based approach proves to be quite
general as it performs extremely well in surface en-
ergy minimization, despite it takes into account just
few parameters. We tested the proposed method
on point sets simulating unorganized point clouds
of scene elements, highlighting the composition of
structural parts, and adding typical points cloud noise
level. Extension of this segmentation framework to
more complex scene elements and very large point
clouds might require some further work, though we
expect that most of the approach can be elegantly gen-
eralized.
The paper is organized as follows: in Section 2
we review state of the art on 3D segmentation; in
Section 3 we introduce the level set framework for
surface reconstruction. In Section 4 we introduce the
voxel space and the proposed 3D segmentation meth-
ods. Section 5 explains the main implementation is-
sues and Section 6 illustrates the performed experi-
ments. Finally, in the conclusion we address how the
method could be used for object segmentation.
2 RELATED WORKS
Our approach is based on raw point cloud analysis,
and survey (Nguyen and Le, 13) summarizes recent
approaches for unorganized point cloud segmenta-
tion. The author propose to classify the segmentation
150
Cafaro B., Azimi I., Ntouskos V., Pirri F. and Ruiz M..
Point Cloud Structural Parts Extraction based on Segmentation Energy Minimization.
DOI: 10.5220/0005309301500157
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 150-157
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Results of model M
1
segmentation and meshing on unorganized 3D laser scan data.
methods in five main methods: edge based, attribute
based, graph based, region based, and model based.
Among the edge based methods, (Ioannou et al., 12)
propose to segment points adopting a difference of
normal (DoN) operator. In (Rusu, 09) the author pro-
poses an attribute based method exploiting euclidean
clustering, and plane fitting, creating a queue for not
labeled points, which are further assigned to one of
the clusters according to features distance. Amid the
graph based methods, (Ma et al., 10) propose to par-
tition the point cloud data adopting a graph min-cut
procedure, where the graph is defined according to
points similarity; then spectral clustering is used to
solve min-cut. In (Nurunnabi et al., 12) region grow-
ing exploits features such as color, normal vectors or
curvature. In (Golovinskiy and Funkhouser, 09) the
proposed graph-cut method computes an edge cost
between points, and between points and source, and
points and sink. Then a min-cut, max-flow approach
is used to cut the created graph. In model based meth-
ods points are grouped using geometric primitives.
In (Kustra et al., 2014) the authors first estimate
surface properties, then apply clustering in the Gauss
sphere to group points in patches. Those are classified
using a connectivity graph.
Other approaches develop on available mesh con-
nectivity, extracting information also from the edges
or the polygons of the mesh itself, for a review see
(Shamir, 08) and references therein. Also mesh seg-
mentation is grouped in five methods: region grow-
ing, hierarchical clustering, iterative clustering, spec-
tral analysis and implicit methods. In iterative clus-
tering the segmentation is formulated as a variational
problem, then a solution is iteratively searched for the
given number of clusters, see for example (Lloyd, 06).
In (Karni and Gotsman, 00) spectral clustering ex-
ploits the same principles for meshes and point sets,
but computing the Laplacian matrix for mesh ver-
tices. In (Schreiner et al., 04) a mesh is divided into
its parametrized surfaces of simplicial domains. Ob-
viously many of the approaches for raw point cloud
data share some common features with mesh based
approaches, and can be easily implemented on both
data structures, except for implicit methods.
The problem of most of these methods with re-
spect to the one proposed in this paper is the lack of a
clear mathematical framework that allows for a paral-
lel computation, essential for large point clouds. This
aspect is not true in Level Set based methods for med-
ical image analysis (see survey (Wirjadi, 07) and ref-
erences therein). Those methods can be applied when
a volumetric representation of the data is available,
and are based on implicit functions evolution, extend-
ing and refining the Chan-Vese algorithm for 2D im-
ages on 3D images.
Other works share common features with our ap-
proach, but are based on completely different mathe-
matical framework. An example is (Schnabel et al.,
07), in which a RANSAC based algorithm is used
to detect clusters of 3D points which belongs to the
same geometrical shape: planes, spheres, cylinders,
cones and tori. This approach has been refined and
extended to cope also with sharp edges in (Tran et al.,
14). In (Turner and Zakhor, 14) the authors develop
an approach based on the extrusion of the 2D map of
a storey, then adding soil and ceiling to obtain a wa-
tertight mesh of that storey.
The roots of the proposed approach can be found
in (Zhao et al., 98; Zhao et al., 01; Liang et al., 13),
in which the authors solve the problem of surface re-
construction. These methods are suited for watertight
reconstruction of an entire object. In (Liang et al., 13)
the inner product field is used to compute a signed
distance function whose zero lies close to the sur-
face approximated by the input points. We extend this
method by forming a mesh only for the input points
which share common predetermined geometric fea-
ture values.
3 PRELIMINARIES AND THE
LEVEL SET METHODS
Level set methods are numerical techniques widely
adopted in computational physics, fluid-dynamics,
computer vision, graphics, and many others fields, for
tracking interface evolution and shapes in many dif-
ferent kind of mediums. The great advantage over
PointCloudStructuralPartsExtractionbasedonSegmentationEnergyMinimization
151

other methods is the possibility to perform numerical
computations involving curves and surfaces on a fixed
Cartesian grid, without having to parameterize these
objects, but using their implicit definition instead.
Notation: In the following we shall use boldface
letters, both lower and upper case, for vectors, matri-
ces and vector fields such as x, w,v, X. We denote
time with t, and use lower-case Greek letters for func-
tions: ρ is used in particular for the distance func-
tion and φ for the level set function. We make argu-
ments of a function explicit only when needed: we
may write φ(w,t), φ(t) or φ(w). We reserve upper
case Greek or Latin letters for sets, in particular the
point set is denoted S and the domain Ω. Points in Ω
are denoted w, and points in S by x, s or x
i
as we indi-
cate with the subscript i the i-th elements of a vector,
matrix or set. For the inner product we use both the ·
or nothing, and in this last case we make explicit the
transpose with the top > as superscript. The partial
derivative of a function ϕ with respect to parameter w
is indicated by ϕ
w
. Finally, we indicate by k·k the
Euclidean norm, by |·| the absolute value.
By structural component of a simple scene ele-
ment we intend that part of a point cloud approxi-
mating an unknown surface patch that could not be
split into simpler elements. Within a scene element
a structural component cannot be broken down into
other scene elements of different kinds. In turn, by a
simple scene element we intend any part of a complex
scene.
Let Ω be a domain in the 3D Euclidean space,
let w = (x,y, z)
>
∈ R
3
and φ : Ω ×R 7→ R, then the
boundary among two regions, within Ω, can be spec-
ified according to an implicit representation: ∂Ω =
{w | φ(w) = 0}. The surface separating these two
regions is the zero level of the function φ(w), called
the level set function. When adopting a level set ap-
proach, one usually starts with an initial guess for
the level set function. Then the guessed function is
evolved considering an algorithmic time, up to con-
vergence to a minimum. This minimum is found
defining another function governing the level set evo-
lution, which is usually a signed or unsigned distance
function. Typically the distance function from a point
w to a set S is defined:
ρ(S,w) = min
x
i
∈S
(kw −x
i
k) (1)
Which implies that when S is the boundary ∂Ω, and
w ∈ ∂Ω, then ρ(∂Ω,w) = 0.
Adopting the Eulerian approach, which is the
same as observing the variation of the level set func-
tion φ(w) in a given location in space, different mod-
els for the evolution of φ(w) can be defined. The level
set equation is defined as:
φ
t
(t) + v ·∇φ(t) = 0. (2)
Here v is the velocity which governs the level set evo-
lution.
3.1 Minimal Surface Energy Model
The level set function φ embeds the surface separating
two regions, during its evolution. If we consider the
samples collected from the surface of an object, such
as S = {x
1
,x
2
,.. . ,x
n
},x
i
∈ R
3
, we would like to ob-
tain a continuous representation of the object, namely
a mesh. To do so we need to represent the surface
energy and minimize it to obtain the meshes. The sur-
face energy for points in S is:
E(Γ) =
Z
Γ
ρ
2
I
(S,w)ds
1/2
(3)
Here Γ is an arbitrary surface in Ω, implicitly defined
by the level set function, namely Γ(t) = {w|φ(w,t) =
0}; ds specifies a surface element and ρ(S,w) is the
distance function defined in equation (1). This is a
minimal surface energy model as defined in (Zhao
et al., 98; Zhao et al., 01). During the evolution, equa-
tion (3) can be easily computed on a volume consider-
ing the Dirac delta function δ
φ
of φ(w), or a smoothed
version of it. This surface, embedded by the level set
function, can be reconstructed considering meshing
algorithms for implicit volumes, as marching cubes,
see for example (Lorensen and Cline, 87).
3.2 Normal Direction of Motion
The motion model for the level set function evolution,
defined by the normal direction of motion, can be ap-
plied when the velocity field is internally generated.
In this case the surface is forced to evolve accord-
ing to its normal direction. Expressing the velocity as
v = (u, v,w)(n,t
1
,t
2
)
>
, where n is the outward nor-
mal to the level set function, and t
1
and t
2
are the tan-
gents, and using this definition of v in equation (2),
we obtain:
φ
t
(t) +
(u,v,w)(n,t
1
,t
2
)
>
∇φ(t)
= 0 (4)
Expanding the second term in the left-hand side of the
above equation the following is obtained:
(u,v,w)
n
1
∂φ/∂w + n
2
∂φ/∂y + n
3
∂φ/∂z
0
0
(5)
Hence equation (4) reduces to:
φ
t
(t) + u
n
>
∇φ(t)
= 0. (6)
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
152

And since n = ∇φ/k∇φ(t)k, for implicit defined sur-
faces, then eq. (6) can be simplified to:
φ
t
(t) + uk∇φ(t)k = 0. (7)
In our implementation u = ρ(S,w) and, for example,
φ(w,0) = kw −ck−r, with c ∈Ω, r > 0.
4 STRUCTURAL PARTS
EXTRACTION
In this section we introduce four methods to extract
the structural parts of a simple scene element. From
now on we assume that each point x
i
∈ S is labeled
with an approximated normal n
i
, computed by least
squares, see (Hoppe et al., 92), and a surface variation
value K
i
, as in (Pauly et al., 03), which is a well known
approximation to one of the principal curvatures. The
computation proposed in (Pauly et al., 03) is based on
(Hoppe et al., 92) computation of the normal, which
actually returns the covariance Σ
N (x)
of a neighbor-
hood of x ∈S, and the eigen-decomposition of the co-
variance. The surface variation is given by λ
1
/
∑
3
i=1
λ
i
with λ
1
≤ λ
2
≤ λ
3
the eigenvalues of Σ
N (x)
eigen-
decomposition. This quantity varies between 0 and
1/3, and has the property of being high if the region is
highly curved and it is small if the region is flat, how-
ever does not capture the principal curvatures and the
induced classes. We use these neighborhood based
methods because we keep the set S unorganized.
4.1 Voxel Space
The discrete voxel space Ω
?
is obtained from the do-
main Ω and the point cloud S as follows. Let M be the
number of points in S, let N (x
j
) = argmin
x
i
(kx
j
−
x
i
k), j 6= i, and ζ = (1/M)
∑
M
j=1
kx
j
−N (x
j
)k, ζ is the
mean distance of each point from its closest neighbor,
then S is filtered using the normal density function de-
fined from ζ and σ=(1/M)
∑
M
i=1
(kx
i
−N (x
i
)k−ζ)
2
and ζ is redefined according to the filtered points.
A single voxel is a cube with size
(dx,dy, dz)
>
=(2ζ,2ζ,2ζ)
>
. The diagonal of a
voxel is dc=(
√
12)ζ and the vertices of the voxel
grid are specified by (i, j,k). The (i, j,k) in-
dices of voxel ω
?
i, j,k
are defined as follows: the
leftmost bottom vertex of the grid has indices
i
0
<x
q
, j
0
<y
q
,k
0
<z
q
, for all (x
q
,y
q
,z
q
)
>
=x
q
∈ S, and
(i, j, k)=(i
0
, j
0
,k
0
)+(i dx, j dy, k dz).
Each generated cuboid has axes parallel to the
reference frame of the point cloud, and it is padded
with an amount δ > 3 of the cuboid edge size, in-
ducing a total number of voxels added for padding
Table 1: Special cases for the c
i
constants of equation (8).
F(w) c
1
c
2
c
3
K 6= 0 c
1
> 1 c
2
= 0 c
3
= 0
K = 0 c
1
= 0 c
2
> 1 c
3
> 1
K = 0 ∧n
?
6= [0, 0,|1|] c
1
= 0 c
2
= 0 c
3
> 1
equal to δ
3
+ 3δ
2
r +3δr
2
(here r is the obtained reso-
lution). The (i, j, k)-th voxel centroid m
i, j,k
is defined
as ω
?
i, j,k
+ (1/2)(dx, dy,dz), and the closest point to
m
i, j,k
is the point x
i
∈ S specified by N (m
i, j,k
).
Note that the voxel space is a grid and that oper-
ations on it are related to the distance function ρ, to
its extensions, as described afterwards, and to the grid
centroids m
i, j,k
labels, namely the geometric features
values. It follows that a centroid m
i, j,k
is meaningful
in terms of the distance to points x
i
∈ S and in terms
of the features labeling the closest point x
i
to m
i, j,k
.
4.2 Feature Extended Distance
Functions
The labeled voxel space is used to define a distance
function accomodating geometric features. This dis-
tance function and its extensions are used to ob-
tain four structural parts segmentation models, as ex-
plained in the following. For each point in S the
features K, h and n, as described in the previous
paragraph, are collected into a descriptor F(x
i
) =
{K, h, n}, with K the mean curvature and h the height.
Hence each voxel is labeled with features values, ac-
cording to F(m
i, j,k
) := F(N (m
i, j,k
)).
The transformed distance function, taking into ac-
count the features descriptor, is defined as follows:
H = c
1
|K −K
?
|+ c
2
|h −h
?
|+ c
3
cos
−1
n ·n
?
|n||n
?
|
(8)
ρ
F
(S,w) =
ρ
I
(S,w) + H if F 6= F
?
H otherwise
(9)
Note that here the c
i
are scalars, whose role is to keep
the distance function within a specified range, and
provide relative importance to the feature difference
terms in equation (8). Moreover the surface variation
K is best used alone than together with the normal
vectors, in some contexts. In such cases the normals
term in equation (8) must be set to zero. These special
cases are reported in Table 1. The starred variables in-
dicate a reference feature value, which determines the
points in S having a minimum for equation (8). These
values are obtained as described in Section 5.
Now, let ` = 0.05 max
Ω
(ρ
F
) be an offset, let B be
PointCloudStructuralPartsExtractionbasedonSegmentationEnergyMinimization
153

a binary tensor:
B =
1 if ρ
F
(S,w) > `
0 if ρ
F
(S,w) ≤ `
(10)
and let DT (B) be the Euclidean distance transform
applied to the binary tensor, we introduce a new func-
tion γ
Ω
: [0, 1] 7→ R defined as follows: γ
Ω
(B) =
DT (B) + DT (I −B) + 0.5B. Let b be a scalar value
corresponding to a level of the level set function φ,
the four models can be defined modulating the initial
level set function φ
0
and the velocity v, according to
the function γ
Ω
, and the extended distance function:
M
1
: ρ
F
(S,w) = ρ
I
(S,w) + H,v = γ
Ω
(B),
φ(w,0) = kw −ck−r
M
2
: ρ
F
(S,w) = ρ
I
(S,w) + H,v = ρ
F
φ(w,0) = γ
Ω
(B) −b
M
3
: ρ
F
(S,w) = H, v = γ
Ω
(B),
φ(w,0) = kw −ck−r
M
4
: ρ
F
(S,w) = H, v = ρ
F
φ(w,0) = γ
Ω
(B) −b
(11)
Note that the distance function ρ and its gradient are
used as the velocity of the level set function evolution
in normal direction. Therefore, the extended distance
function can enforce the level set function to converge
to the desired location avoiding unwanted points. The
four models are resumed as follows:
Model M
1
. Here the distance function ρ
F
has a
global minimum located at the voxels closer to the
point w belonging to the structural part to be singled
out. In fact, ρ
F
is always positive, as it is each term in
equation (8), though it is not smooth, except near the
target points. This is the reason why we introduced
the offset `. Furthermore, B is a binary tensor taking
on values 1 or 0 and the function γ
Ω
is used to define
the velocity v in (11). Level set function is initialized
using a general shape.
Model M
2
. In this model the extended distance func-
tion is the same as in the previous one, which is here
used as velocity to evolve the level set function. Con-
versely the distance transform function γ
Ω
is used for
the level set function initial guess, namely for φ
0
.
Note that here φ
0
= γ
Ω
(B) −b, where b is needed to
extrapolate the function. The evolution of this initial-
ized level set function is governed by ρ
F
, adopting the
normal direction of motion model. Smoothness in the
region close to target points ensures convergence only
if b is suitably trimmed.
Model M
3
. The same parametrization applied to
model M
1
applies to this model, the major difference
being in the definition of ρ
F
, here lacking the first
term ρ. Also in this case ρ
F
is not smooth (except
close to the target points), but has a global minimum
close to the points corresponding to the structural part
0
50
100
150
200
0
100
200
300
Iterations
Energy
(M
1
)
(M
2
)
(M
3
)
(M
4
)
Figure 2: Energy VS iterations in the four methods, for the
first scene element of Figure 3.
to be singled out. Like in M
1
, applying the function
γ
Ω
a smooth function is obtained, whose minimum is
still located where the minimum of ρ
F
is located. As
in model M
1
this smooth function is used as velocity
to evolve the level set function, considering a general
shape for the initial guess.
Model M
4
. For this method we can just note that it
is the same as model M
2
apart from the definition of
ρ
F
here lacking the first term ρ as in model M
3
. The
term ρ has been dropped as ρ has been used to deviate
the reference normal assigned to the domain Ω.
Finally, energy minimization with the above mod-
els amounts to use the energy function of eq. (3), and
minimizing with respect to the above defined feature
based distance functions, namely:
argmin
w
E(Γ,ρ
F
(S,w)) (12)
5 IMPLEMENTATION
As previously highlighted the voxel space Ω
?
is
meaningful only for feature labeling, and for the com-
putation of the distance function ρ(S, w). Let V be
the crust of voxels close to the original input points.
For each ω
i, j,k
∈ V we define a window W (ω
i, j,k
)
of fixed size and the smoothness of K
i
is checked
within this window. More precisely, smoothness for
each voxel in W (ω
i, j,k
) is defined to be the squared
difference between the norm of the curvature gradi-
ent and the average of the curvature gradient norm
in W (ω
i, j,k
). If this value is less than a threshold τ
then the local window is accepted as smooth. The
geometric based distance function ρ
F
?
(S,w) is, then,
computed for the specified F
?
. Minimization is fi-
nally obtained and a mesh is extracted for the selected
points. At the end all voxels close to the final mesh
are excluded for further processing. The procedure is
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
154

Input : Unorganized point cloud S, geometric
features F(x
i
) = {K,h, n}, threshold τ
Output: Minimal surface energy
E (Γ, ρ
F
?
(S,w)) for each model M
i
,
i ∈ {1,2,3, 4}.
Build the voxel space Ω
?
⊂ Ω;
∀ w ∈ Ω
?
compute ρ(S,w);
F(ω
?
i, j,k
) = F(N (ω
?
i, j,k
));
V = {ω
i, j,k
| ρ(S,ω
?
i, j,k
) < 0.01};
while V 6= ∅ do
Select a voxel ω
i, j,k
∈ V ;
if ∀ ω
i, j,k
∈ W (ω
i, j,k
),
k∇K(ω
i, j,k
)k−
1
|W (ω
i, j,k
)|
R
W (ω
i, j,k
)
k∇K(ω
i, j,k
)kdω
2
≤ τ
then
F
?
= F(ω
?
i, j,k
);
∀ w ∈ Ω
?
compute ρ
F
?
(S,w);
Initialize level set: φ(w,0);
Compute E (Γ, ρ
F
?
(S,w));
V
o
=
{ω
i, j,k
| argmin
w
E (Γ, ρ
F
?
(S,w))};
V = V \V
o
;
else
Label ω
i, j,k
∈ V as edge;
V = V \W (ω
i, j,k
);
end
end
Algorithm 1: Structural parts extraction.
iterated, choosing another voxel in V randomly, up to
when V is emptied. This procedure is summarized in
Algorithm 1.
As noted in Section 4, the initialization of the level
set function can use any shape, except for the ap-
proaches M
2
and M
4
. This is the main reason why the
algorithm requires many iterations to converge (see
Figure 2), as typically the starting surface lies very
far away from the input points. For the level set evolu-
tion we adopt a WENO5 approach, and the Godunov
scheme for the normal direction of motion. For sta-
bility, during evolution, the correct space derivative
(right or left), is chosen according to the sign of the
velocity of w. On the other hand the time step is de-
fined according to the CLF conditions (see (Osher and
Fedkiw, 03)). We control the time step by taking only
a fraction of the maximum allowed time step. This
slows down the convergence too, though it guaran-
tees better final results. Level set evolution is also
implemented to run on a GPU. This makes the to-
tal evolution time reasonable, but not yet useful for
real-time applications. Moreover, especially for the
models M
2
and M
3
the level set update must be eval-
uated only in the narrow band close to the interface,
and a periodic reinitialization, according to (Sussman
and Fatemi, 99), must be performed to ensure a good
reconstruction.
The proposed implementation exploits GPU to
compute the distance functions and to evolve the level
set toward its minimum. The bottleneck in computa-
tion time is given by the distance functions evaluation,
which is strongly affected by the size of S. The level
set evolution is also time expensive, but this is due to
the initialization and the chosen time step value, as
noted before.
6 EXPERIMENTS
The proposed approach has been tested with manu-
ally built point sets of simple scene elements of an
approximate size of 2 ×2 ×2 meters. This to evalu-
ate the structural component separability in terms of
planes, which are separated by their normal direction,
and have a zero curvature, as in the first row of Figure
3. Moreover, different horizontal planes in the scene
are separated according to the h value, as in the sec-
ond row of Figure 3. The surface variation of (Pauly
et al., 03) is useful to evaluate different shapes, but it
is not enough to distinguish between a cylinder and a
sphere, but a sphere and a cone, as can be seen in the
third and fourth rows of Figure 3.
In Figure 3 the meshes extracted after level set
evolution are shown. To evaluate accuracy of the re-
construction we look at the average distance among
the vertex of the reconstructed mesh and the input
point cloud S. This distance is reported in Table 2.
One can see that the approximation of the minimal
surface energy is quite accurate. This is because the
average distance, in the most meaningful cases, is less
than a centimeter, given that the objects in Figure 3
have size of meters. A parameter which influences
this final distance is the offset `, but only for the re-
construction models M
1
and M
3
, as the transformed
distance function γ
Ω
(B) is used in these models to
drive the level set evolution. As expected the resulting
mesh is more noisy for the model M
3
, but especially
for model M
4
as in this case the level set evolution is
governed only by H, which is smooth only very close
to the target points. This aspect is overcome in model
Table 2: Accuracy results for the four proposed models.
Both mean and max distances are reported in meters.
Mean Max Mean Max
M
1
0.007 0.035 M
3
0.014 0.011
M
2
0.004 0.09 M
4
0.021 0.21
PointCloudStructuralPartsExtractionbasedonSegmentationEnergyMinimization
155
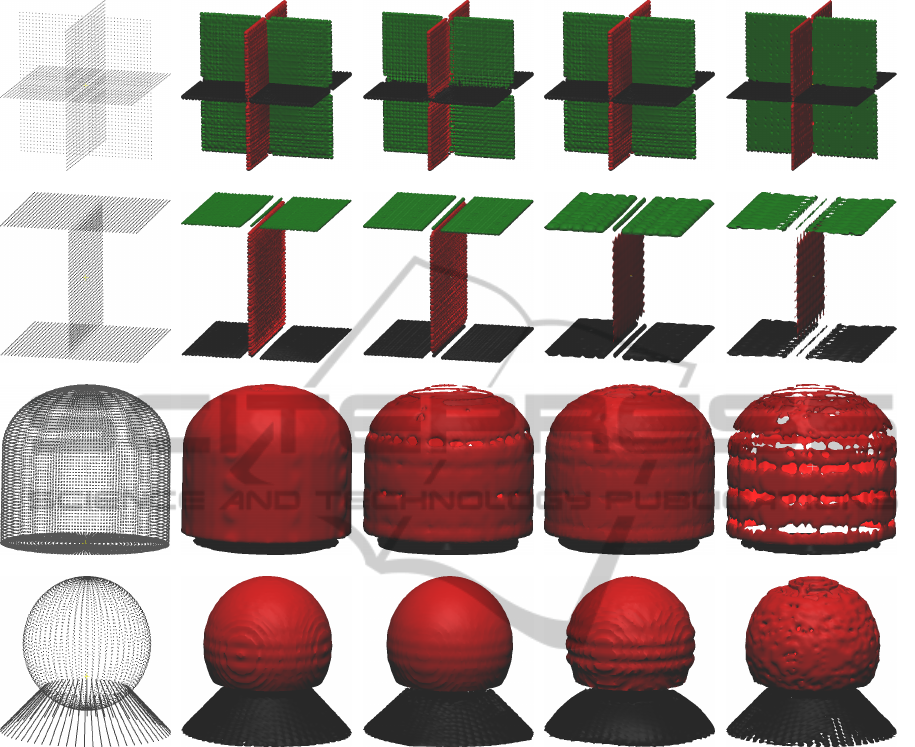
Figure 3: From left to right: results according to the four models in ascending order. Objects’ bounding box are approximately
2 ×2 ×2 meters. Number of points is approximately 10k, for each object.
M
2
, due to the addition of ρ(S,w).
Results for Gaussian added noise, with increasing
variance, are shown in Figure 4. To compute precision
and recall we consider that an input point belongs to
a segment if its distance from its closer vertex, in the
extracted mesh, is less than a threshold. Charts of
Figure 4 illustrate the results obtained increasing this
threshold. 100% of precision is obtained when the
threshold distance is quite high. On the other hand if
the noise level is low, decreasing this threshold does
not affect the good performance of precision.
7 CONCLUSIONS
The paper introduces a novel approach to the extrac-
tion of the structural parts of simple scene elements,
contextually obtaining a mesh for these parts. The
methods return a set of meshes labeled with the fea-
ture values used to extract it, and return no meshes
for points belonging to edges amid different struc-
tural parts. The main contribution is the mesh recon-
struction of singled out point clouds, despite the point
cloud is a finite set of unorganized points. Results are
accurate in general, despite the fact that the frame-
work is quite simple requiring only few parameters
for features computation. In addition, voxel size (time
step) is determined by the average density of the pro-
vided point cloud. The reported results show that the
first and the second methods are the most accurate.
This work is a preliminary step for 3D object seg-
mentation. 3D object segmentation requires structural
parts decomposition of the unknown surface approxi-
mated by the point cloud, together with a precise parts
labeling. We cannot yet evaluate completely whether
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
156
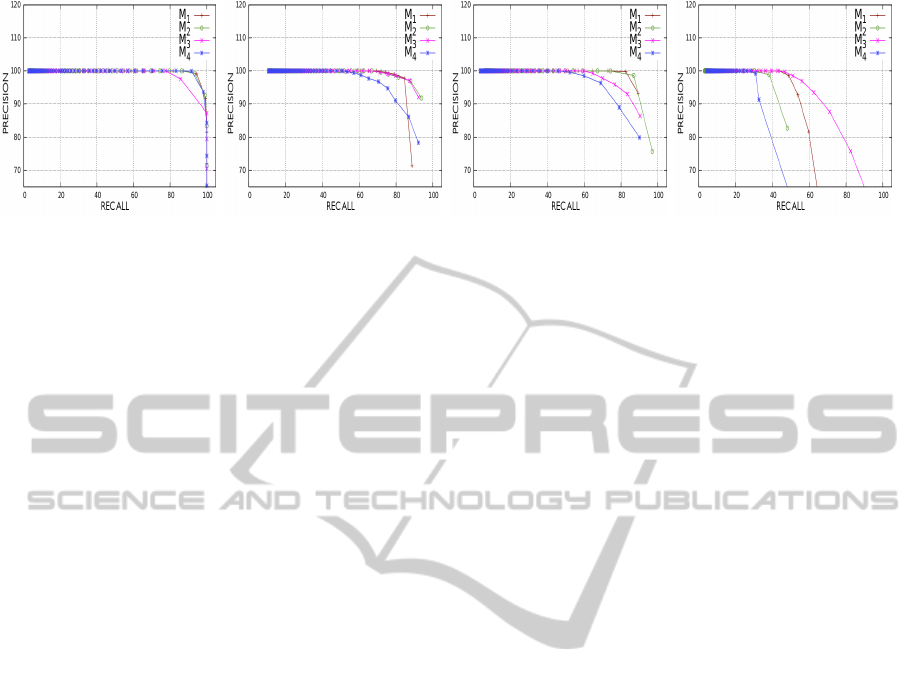
(a) σ
2
= 0 (b) σ
2
= 0.1 (c) σ
2
= 0.5 (d) σ
2
= 2
Figure 4: From Left to right: precision and recall charts for the simulated objects, for the four methods, with increasing noise.
the geometric features are sufficient to single out all
the structural parts of a scene. Still, the method can be
easily extended to fulfil further features requirements,
adding further features in the computation of equation
(8) and (9). Also more precise geometric features,
such as the principal curvatures could provide exact
categories for structural parts.
ACKNOWLEDGEMENTS
This research is currently supported by EUFP7-ICT-
Project TRADR 60963.
REFERENCES
Golovinskiy, A. and Funkhouser, T. (’09). Min-cut based
segmentation of point clouds. In IEEE Workshop on
Search in 3D and Video (S3DV) at ICCV.
Hoppe, H., DeRose, T., Duchamp, T., Mcdonald, J., and
Stuetzle, W. (’92). Surface reconstruction from unor-
ganized points. In SIGGRAPH, pages 71–78.
Ioannou, Y., Taati, B., Harrap, R., and Greenspan, M. A.
(’12). Difference of normals as a multi-scale opera-
tor in unorganized point clouds. In 3DIMPVT, pages
501–508.
Karni, Z. and Gotsman, C. (’00). Spectral compression of
mesh geometry. In 27th Conf. on Comp. Graphics and
Int. Techniques, SIGGRAPH, pages 279–286.
Kustra, J., Jalba, A., and Telea, A. (2014). Robust segmen-
tation of multiple intersecting manifolds from unori-
ented noisy point clouds. pages 73–87.
Liang, J., Park, F., and Zhao, H. (’13). Robust and efficient
implicit surface reconstruction for point clouds based
on convexified image segmentation. J. Sci. Comput.,
54(2-3):577–602.
Lloyd, S. (’06). Least squares quantization in pcm. IEEE
Trans. Inf. Theor., 28(2):129–137.
Lorensen, W. E. and Cline, H. E. (’87). Marching cubes:
A high resolution 3d surface construction algorithm.
SIGGRAPH Comput. Graph., 21(4):163–169.
Ma, T., Wu, Z., Feng, L., Luo, P., and Long, X. (’10).
Point cloud segmentation through spectral clustering.
In ICISE, pages 1–4.
Nguyen, A. and Le, B. (13). 3d point cloud segmentation:
A survey. In 6th Conf. in Robotics, Automation and
Mechatronics (RAM), pages 225–230.
Nurunnabi, A., Belton, D., and West, G. (12). Robust seg-
mentation in laser scanning 3d point cloud data. In
DICTA, pages 1–8.
Osher, S. and Fedkiw, R. (03). Level Set Methods and Dy-
namic Implicit Surfaces. Springer.
Pauly, M., Keiser, R., and Gross, M. (’03). Multi-scale fea-
ture extraction on point-sampled surfaces. Computer
Graphics Forum, 22(3):281–289.
Rusu, R. B. (’09). Semantic 3D Object Maps for Everyday
Manipulation in Human Living Environments. PhD
thesis, Computer Science dpt. TUM.
Schnabel, R., Wahl, R., and Klein, R. (’07). Efficient
RANSAC for point-cloud shape detection. Comput.
Graph. Forum, 26(2):214–226.
Schreiner, J., Asirvatham, A., Praun, E., and Hoppe, H.
(’04). Inter-surface mapping. SIGGRAPH, pages
870–877, NY, USA. ACM.
Shamir, A. (08). A survey on mesh segmentation tech-
niques. Comput. Graph. Forum, 27(6):1539–1556.
Sussman, M. and Fatemi, E. (’99). An efficient, interface-
preserving level set redistancing algorithm and its
application to interfacial incompressible fluid flow.
SIAM J. Sci. Comput., 20(4):1165–1191.
Tran, T., Cao, V., Nguyen, V., Ali, S., and Laurendeau, D.
(’14). Automatic method for sharp feature extraction
from 3d data of man-made objects. In GRAPP 2014,
pages 112–119.
Turner, E. and Zakhor, A. (’14). Floor plan generation
and room labeling of indoor environments from laser
range data. In GRAPP 2014, pages 22–33.
Wirjadi, O. (07). Survey of 3d image segmentation meth-
ods. Technical Report 123, Fraunhofer (ITWM).
Zhao, H. K., Stanley, O., Barry, M., and Myungjoo, K.
(’98). Implicit, nonparametric shape reconstruction
from unorganized points using a variational level set
method. Computer Vision and Image Understanding,
80:295–319.
Zhao, H. K., Stanley, O., and Ronald, F. (’01). Fast surface
reconstruction using the level set method. In IEEE
Workshop on Variational and Level Set Methods in
Computer Vision, pages 194–201.
PointCloudStructuralPartsExtractionbasedonSegmentationEnergyMinimization
157
