
Real-time Visualization of High-Dynamic-Range Infrared Images
based on Human Perception Characteristics
Noise Removal, Image Detail Enhancement and Time Consistency
Frederic Garcia, Cedric Schockaert and Bruno Mirbach
PTU Optical, IEE S.A., 11, rue Edmond Reuter, Contern, Luxembourg
Keywords:
Detail Enhancement, Contrast Enhancement, Noise Removal, High-Dynamic-Range, Infrared Images, Human
Perception, Time Filtering.
Abstract:
This paper presents an image detail enhancement and noise removal method that accounts for the limitations
on human’s perception to effectively visualize high-dynamic-range (HDR) infrared (IR) images. In order to
represent real world scenes, IR images use to be represented by a HDR that generally exceeds the working
range of common display devices (8 bits). Therefore, an effective HDR compression without loosing the
perceptibility of details is needed. We herein propose a practical approach to effectively map raw IR images
to 8 bit data representation. To do so, we propose an image processing pipeline based on two main steps.
First, the raw IR image is split into base and detail image components using the guided filter (GF). The
base image corresponds to the resulting edge-preserving smoothed image. The detail image results from the
difference between the raw and base images, which is further masked using the linear coefficients of the GF,
an indicator of the spatial detail. Then, we filter the working range of the HDR along time to avoid global
brightness fluctuations in the final 8 bit data representation, which results from combining both detail and base
image components using a local adaptive gamma correction (LAGC). The last has been designed according to
the human vision characteristics. The experimental evaluation shows that the proposed approach significantly
enhances image details in addition to improving the contrast of the entire image. Finally, the high performance
of the proposed approach makes it suitable for real word applications.
1 INTRODUCTION
In contrast to common cameras where images are
formed using visible light (450-750 nm), IR cam-
eras operate using IR radiations (wavelengths as long
as 14 µm). Therefore, the variation of the measur-
ing range might be considerable in real world scenar-
ios, e.g., thermal measures from the sky against those
from the engine of a driving car. This implies the use
of high-precision analog to digital (ADC) data con-
verters which entails to use either 12 or 14 bits for
data representation. On the other side, display devices
are intended to display 8 bit data, requiring IR images
to be compressed for visualization, which may yield
to the loss of significant details.
The literature presents a vast number of useful im-
age processing techniques to increase the image con-
trast, enhance image details and/or reduce the amount
of noise. Although most of these techniques are in-
tended for 8 bit still images, they can be adapted
and/or combined to address the enhancement of IR
image details whilst compressing its HDR into a
proper range for display. Indeed, variations of gamma
correction (GC) and histogram equalization (HE) ap-
proaches have been widely used to fit the raw data
into a 8 bit data representation with an increase of
the global contrast. Silverman (Silverman, 1993) en-
hanced the contrast in dominating temperature ranges
of the scene and addressed several issues inherent in
the traditional HE (Pizer et al., 1987), such as noise
amplification within uniform areas. Similarly, Vick-
ers (Vickers, 1996) extended the traditional HE with
the known Plateau-HE, where the dominating inten-
sities of the histogram were clipped and thus, leading
to a reduction of the amplification of noise within uni-
form areas. To better enhance local details in the im-
age with a better robustness against noise, local meth-
ods such as Adaptive HE (AHE) (Pizer et al., 1987) or
Contrast Limited AHE (CLAHE) (Zuiderveld, 1994)
might be considered. Those methods are based on
the computation and processing of a local histogram.
A spatial interpolation is performed in order to avoid
144
Garcia F., Schockaert C. and Mirbach B..
Real-time Visualization of High-Dynamic-Range Infrared Images based on Human Perception Characteristics - Noise Removal, Image Detail
Enhancement and Time Consistency.
DOI: 10.5220/0005309501440152
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 144-152
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

visible artefacts after the local processing. How-
ever, those methods are usually computationally ex-
pensive due to their high level of complexity. In
(Kim et al., 2001), a method called Partially Over-
lapped Sub-Block HE was proposed to highlight the
detail contrast for a lower computation time. How-
ever, small details are highly attenuated or removed.
To overcome this issue, Liang et al (Liang et al., 2012)
proposed to locally apply a double local plateau his-
togram in order to enhance the background while pre-
serving the details. In order to significantly reduce
the noise without attenuating or removing image de-
tails, Durand and Dorsey (Durand and Dorsey, 2002)
suggested the use of an edge-preserving filter to split
the IR image into base and detail image components
and process them separately. More recent, many ef-
forts have been done on the processing of each image
component as well as on their combination.
Inspired by the idea of splitting the raw IR image
in base and detail image components suggested by
Durand and Dorsey (Durand and Dorsey, 2002), we
herein propose a new pipeline to efficiently enhance
important image details whilst suppressing noise and
increasing the global image contrast, satisfying the
human visual perception.
The remainder of the paper is organized as fol-
lows: Section 2 covers the literature review on recent
detail enhancement and visualization techniques for
IR images. In Section 3 we present the proposed ap-
proach for real-time visualization of HDR IR images.
Section 4 presents the evaluation of the proposed ap-
proach in which real IR scenes have been considered.
A comparison against the most recent DDE-based fil-
ters is also provided. Finally, concluding remarks and
future work directions are given in Section 5.
2 RELATED WORK
Recent IR image visualization approaches are
strongly related to the enhancement of the details in
the resulting 8 bit image representation. Glush et
al. (Glushko and Salvaggio, 2007) limited the noise
amplification by the so-called unsharp masking, a
technique that defines a detail map to classify noise
and detail pixels depending on the intensity of the de-
tail. An alternative approach is the Balanced CLAHE
and Contrast Enhancement (BCLAHE-CE), an ex-
tension of CLAHE in combination with contrast en-
hancement and HDR compression that was proposed
in (Branchitta et al., 2008). As suggested by Durand
and Dorsey (Durand and Dorsey, 2002), bilateral filter
(BF) has been widely used to define a detail map. An
example is the Filter and Dynamic Range Partition-
ing (BF&DRP) presented in (Branchitta et al., 2009).
However, it is known that BF suffers from gradient
reversal artefacts along edges, which might be visible
in the resulting 8 bit image. Zuo et al. (Zuo et al.,
2011) addressed the gradient reversal artefact on their
BF-based Digital Detail Enhancement (BF&DDE) fil-
ter by applying a Gaussian low pass filter on the re-
sulting base image component. In addition, the BF
coefficients were used to enhance the image details
while keeping a low level of noise. In (Karali et al.,
2010), the authors proposed a technique that classi-
fies objects and background e.g., sea and sky. There-
fore, only objects were enhanced. A Fourier analysis
was performed to define the base image, medium de-
tail map and fine detail map, which was enhanced by
respective multiplicative gain allowing a reduction of
the halo on warm objects. More recently, He et al. (He
et al., 2013) presented a new edge preserving filter,
the so-called guided filter (GF). As suggested by the
authors, the GF might be also considered to define
the detail map, replacing the BF. Indeed, in contrast
to the BF, GF does not suffer from the edge artefact
and its processing time is significantly smaller. Liu
et al. (Liu and Zhao, 2014) updated their previous
work (Zuo et al., 2011) by using GF instead of BF.
As expected, the GF&DDE performance significantly
increased while presenting very close results. How-
ever, the above presented approaches are intended for
static IR images, which produce a non desired varia-
tion of the background intensity values when applied
to a video sequence.
In the following, we present the so-called Tempo-
ral DDE (TDDE) filter which, in addition to enhance
and preserve image details with an effective HDR
compression, it addresses the temporal constraint to
avoid global brightness fluctuations along the result-
ing 8 bit image sequence. Similarly to (Liu and Zhao,
2014), the TDDE filter also uses the GF to define
the detail map. However, it differs from alternative
DDE-based filters in the way to combine the result-
ing base and detail image components. Indeed, no
data rearrangement is needed in the combination pro-
cess. Inspired from (Liu et al., 2012), the 8 bit conver-
sion uses a local adaptive gamma correction (LAGC)
based on the Weber’s law. Therefore, the TDDE filter
is more suited to the human visual perception.
3 PROPOSED APPROACH
Fig. 1 presents the flow diagram of the proposed
TDDE filter in which, following the advise of Durand
and Dorsey (Durand and Dorsey, 2002) we split the
raw IR image I into base B and detail D image com-
Real-timeVisualizationofHigh-Dynamic-RangeInfraredImagesbasedonHumanPerceptionCharacteristics-Noise
Removal,ImageDetailEnhancementandTimeConsistency
145

Figure 1: Flow diagram of the proposed TDDE filter.
ponents. This in turn, allows us to independently en-
hance and preserve image details whilst compressing
the HDR.
3.1 Base Image Component
Similarly to (Zuo et al., 2011; He et al., 2013; Liu
and Zhao, 2014), we also rely on the advise of He et
al. (He et al., 2013) when choosing the GF to split
I into base B and detail D image components. GF
presents better behaviour near edges than BF with a
major advantage of being a fast and non-approximate
linear time algorithm, regardless of the kernel size and
the intensity range. In addition, it does not suffer from
the gradient reversal artefacts of BF (Zuo et al., 2011;
He et al., 2013). The B image component is then the
resulting edge-preserving smoothed image, a linear
transform of I in a window w
k
centred at pixel k, i.e.,
B
i
=
¯
a
i
I
i
+
¯
b
i
, ∀i ∈ w
k
, (1)
where
¯
a
i
=
1
|w|
∑
k∈w
i
a
k
, with a
k
=
1
|w|
∑
i∈w
k
I
2
i
−
¯
I
2
k
σ
2
k
+ ε
, (2)
¯
b
i
=
1
|w|
∑
k∈w
i
¯
I
k
− a
k
¯
I
k
, (3)
are linear coefficients assumed to be constant in w
k
.
σ
2
k
is the variance of I in w
k
, |w| is the number of
pixels in w
k
, ε is a regularization parameter penaliz-
ing large a
k
, and
¯
I
k
=
1
|w|
∑
i∈w
k
I
i
is the mean of I in
w
k
. The selection of the w
k
size might be done ac-
cordingly to the minimum size of the details to be
preserved in I. Herein, we choose a small w
k
size
(3 × 3) in order to preserve and enhance fine details
such as trees’ leaves. The smoothing level is given
by the ε parameter. That is, if ε is setted too small,
e.g., 10, not only image details are preserved but also
noise and tiny structures in the image. Therefore, a
good compromise is to set a small window size and
a large ε value. By doing so, details along strong
edges will be preserved whereas uniform regions will
be smoothed. Fig. 3 presents different B images il-
lustrating the behaviour of the GF depending on the
chosen window size and ε parameters. We note that
bigger ε values will dramatically increase the smooth-
ing effect when combined with larger w
k
sizes (see
Fig. 3(e) and Fig. 3(f)). The input raw image I shown
in Fig. 2 has been considered as a test case.
Figure 2: Raw input image I used as a test case.
3.2 Detail Image Component
In general, the detail image component D results from
the difference between the input raw image I and the
filtered B image, i.e., D = I − B. In Fig. 4, we present
the detail images D that result from the difference be-
tween I in Fig. 2 and each B image component in
Fig. 3. As above-mentioned, not only tiny details but
also noise is present in D when setting ε too small
(see Fig. 4(a)). Instead, noise can be significantly re-
duced by setting ε big enough (see Fig. 4(c)). But, this
in turn will suppress desired details in D. Therefore,
a tradeoff between noise removal and detail preserve
needs to be chosen, even though retained noise may
be identified as details and thus enhanced by mistake
in the resulting 8 bit image.
According to the human perception, noise within
smooth image regions can be easily perceive by the
observer as spurious or texture whereas it is almost
imperceptible along sharp edges. Taking that into ac-
count, we propose to mask the noise depending on
the spatial detail. To that end, we have considered
the linear coefficient
¯
a
i
that results from the GF. As
can be observed in Fig. 6,
¯
a
i
clearly reflects the spa-
tial detail of the image. Thus, we can significantly
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
146
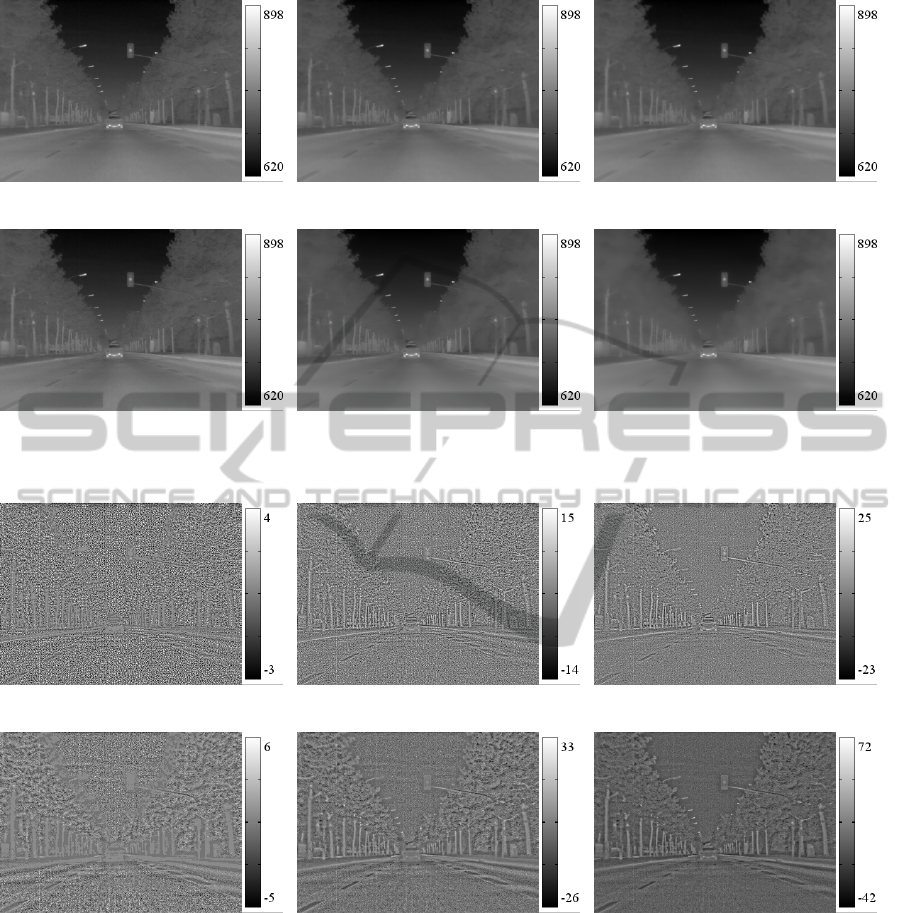
(a) B, (k = 3, ε = 10) (b) B, (k = 3, ε = 150) (c) B, (k = 3, ε = 500)
(d) B, (k = 9, ε = 10) (e) B, (k = 9, ε = 150) (f) B, (k = 93, ε = 500)
Figure 3: B images illustrating the behaviour of the GF depending on the window w
k
size and the ε parameter.
(a) D, (k = 3, ε = 10) (b) D, (k = 3, ε = 150) (c) D, (k = 3, ε = 500)
(d) D, (k = 9, ε = 10) (e) D, (k = 9, ε = 150) (f) D, (k = 9, ε = 500)
Figure 4: Resulting detail image D depending on the filter parameters.
reduce the amount of noise by masking D using
¯
a
i
,
i.e., D
0
= λ
¯
a
i
· D, with λ a gain factor to increase, if
desired, the contrast of the details in D. We present,
in Fig. 5, the enhanced D
0
image component after be-
ing masked using
¯
a
i
. In addition, we also illustrate the
behaviour of increasing the λ gain.
3.3 8 bit Data Representation
In general, DDE filters based on raw image splitting
compress the HDR of B using extended histogram
equalization techniques for its conversion to the 8 bit
domain. The final 8 bit enhanced image O results
from the sum of the compressed B and the enhanced
D
0
, i.e., O = B + D
0
(Durand and Dorsey, 2002; Liu
and Zhao, 2014; Zuo et al., 2011). However, this
straightforward combination of B and D
0
yields to sat-
uration in most of the cases since pixel values of D
0
are considerable if compared to the 8 bit data range
representation, e.g., see the data range representation
Real-timeVisualizationofHigh-Dynamic-RangeInfraredImagesbasedonHumanPerceptionCharacteristics-Noise
Removal,ImageDetailEnhancementandTimeConsistency
147
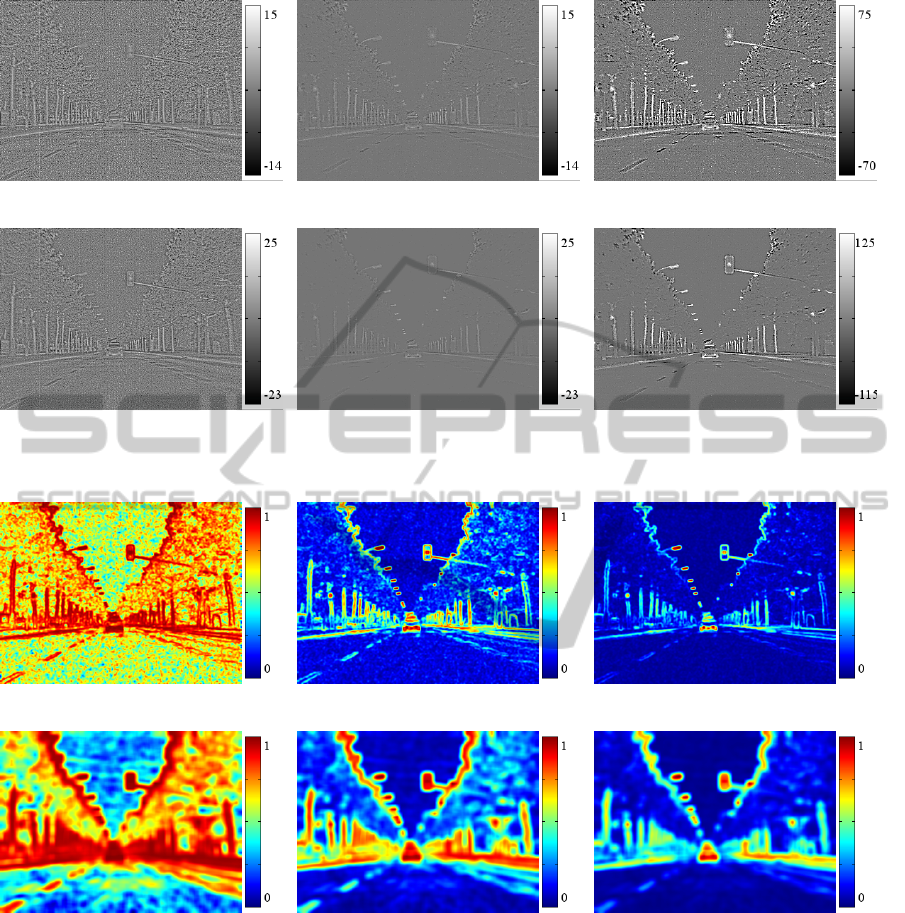
(a) D, (k = 3, ε = 150) (b) D
0
, (k = 3, ε = 150, λ = 1) (c) D
0
, (k = 3, ε = 150, λ = 5)
(d) D, (k = 3, ε = 500) (e) D
0
, (k = 3, ε = 500, λ = 1) (f) D
0
, (k = 3, ε = 500, λ = 5)
Figure 5: Resulting detail image D
0
after noise masking and detail magnification.
(a) a
i
, (k = 3, ε = 10) (b) a
i
, (k = 3, ε = 150) (c) a
i
, (k = 3, ε = 500)
(d) a
i
, (k = 9, ε = 10) (e) a
i
, (k = 9, ε = 150) (f) a
i
, (k = 9, ε = 500)
Figure 6: Resulting a
i
depending on the filter parameters.
in Fig. 5(f).
Following the TDDE filter diagram flow presented
in Fig. 1, we combine both B and D
0
image compo-
nents before being converted to 8 bit data representa-
tion. By doing so, we avoid the data rearrangement
process which might require manual tuning depend-
ing on the filter and gain factor parameters (Liu and
Zhao, 2014; Zuo et al., 2011).
To address the 8 bit data conversion, we have
adopted the LAGC approach presented in (Liu et al.,
2012). According to (Liu et al., 2012), LAGC in-
corporates human visual properties in their design of
the detail enhancement. Indeed, LAGC is based on
the Weber’s law, which is commonly used in cases
where fine details are present on a large uniform back-
ground. As a result, details that can be hardly seen on
darker and/or brighter background become percepti-
ble by the human eye.
In practice, the active data range in the raw IR im-
age I is generally narrow and thus, a linear extension
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
148
of the active range will ensure a significant variation
of the background intensity, i.e.,
I
00
(i, j) =
(2
M
− 1)(I
0
(i, j) − I
t
min
)
I
t
max
− I
t
min
, (4)
with I
0
= B + D
0
, M the number of bits (12 or 14) to
encode I, and I
t
min
and I
t
max
the limits of the active data
range computed from a temporal statistical stabiliza-
tion, i.e.,
I
t
max
= ¯µ
t
+ k
1
¯
σ
t
(5)
I
t
min
= ¯µ
t
− k
2
¯
σ
t
, (6)
with k
1
and k
2
defining the active data range to be
considered in the 8 bit representation. From our ex-
periments, k
1
= 3 and k
2
= 1 provide good results to
enhance the perception of warm objects.
¯µ
t
= α · µ
t
+ (1 − α) · ¯µ
t−1
(7)
¯
σ
t
= α · σ
t
+ (1 − α) ·
¯
σ
t−1
, (8)
are respectively the adapted mean and standard devi-
ation of I at time t, with µ
t
and σ
t
the respective mean
and standard deviation of I at time t (¯µ
0
= µ
0
= 0 and
¯
σ
0
= σ
0
= 0). α ∈ [0, 1] defines the speed to adapt I
t
min
and I
t
max
to the limits of the active data range of frame
t. Thereby, the smaller the α value, the smoother the
global brightness fluctuations between frames.
The human eye can hardly distinguish small
brightness differences such as image details on dark
or bright backgrounds. In contrast, the same bright-
ness differences become perceptible in the middle
backgrounds. This behaviour is modelled by the We-
ber’s law and it has been used to design the local adap-
tive gamma value as follows
γ(i, j) = max
exp
B(i, j) − 2
M−1
2
M−1
, 1
, (9)
where we consider the B image component as a
mild background representation. From (9), brightness
differences are significantly magnified for B values
greater than 2
M−1
which meets the purpose of the We-
ber’s law to enhance warmer objects. That is, LAGC
must be only applied when γ ≥ 1. The final 8 bit im-
age representation results from
O(i, j) = (2
N
− 1) ·
I
00
(i, j)
2
M
− 1
γ(i, j)
, (10)
with N = 8 for data representation within the range
[0, 255].
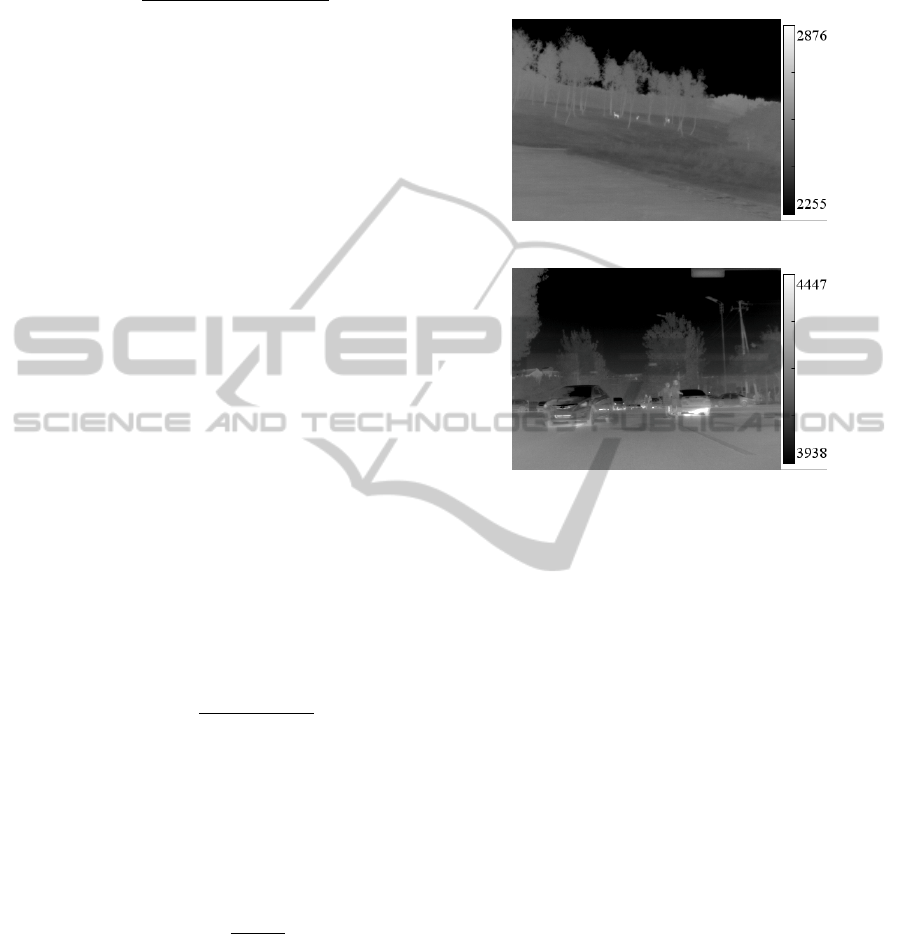
4 EXPERIMENTAL EVALUATION
In the following, we evaluate the presented TDDE
filter using real scenes acquired by a prototype ther-
mal camera that provides HDR IR images of (384 ×
288) pixels. All reported results have been obtained
using an Intel
R
Core
TM
i5-4200U CPU @ 1.60GHz
with an integrated graphic card Intel
R
HD Graphics
4400.
(a)
(b)
Figure 7: Considered night vision scenes for evaluation. (a)
Forest scene. (b) City scene.
The proposed TDDE filter has been compared
against the most recent DDE-based techniques, i.e.,
BF&DDE and GF&DDE. All DDE-based approaches
have been implemented in C++ language using the
OpenCV (Bradski and Kaehler, 2008) library.
Fig. 8 presents and compares the resulting 8 bit
image after applying BF&DDE, GF&DDE, and the
proposed TDDE filter on two real night vision scenes,
i.e., forest and city scene (see Fig. 7). The forest scene
presents very fine details such as trees’ leaves, and a
group of deer that is almost non-perceptible in the raw
IR image. The city scene is a more challenging case
due to the high variability of temperature ranges, e.g.,
sky, cars and people.
Although BF&DDE and GF&DDE present very
close results, we can appreciate more satisfactory re-
sults when applying the TDDE filter. Indeed, warm
objects can be better perceived from the background
as a consequence of the dedicated LAGC implemen-
tation to handle warm pixels (see Section 3.3). In ad-
dition, it avoids undesirable artefacts such as the am-
plification of the noise within the sky and fine details
become perceptible to the human eye, e.g., deer and
trees’ leaves (in the forest scene), or people and car
edges (in the city scene) are better enhanced, present-
ing an improvement on the global sharpness of the
Real-timeVisualizationofHigh-Dynamic-RangeInfraredImagesbasedonHumanPerceptionCharacteristics-Noise
Removal,ImageDetailEnhancementandTimeConsistency
149
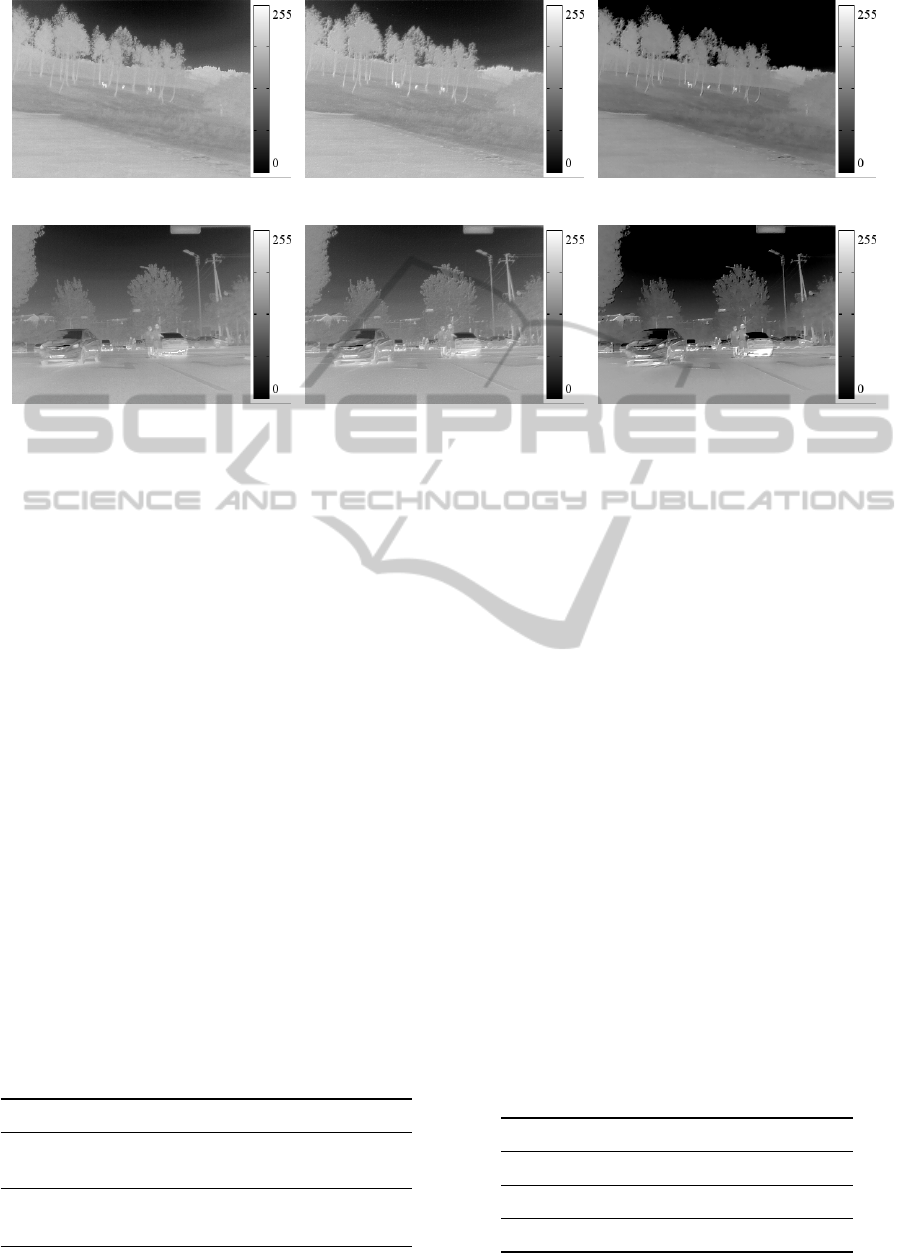
(a) BF&DDE (b) GF&DDE (c) TDDE, (k = 3, ε = 150, λ = 5)
(d) BF&DDE (e) GF&DDE (f) TDDE, (k = 3, ε = 150, λ = 5)
Figure 8: Comparison between BF&DDE, GF&DDE, and the proposed TDDE filter. 1
st
row. Forest scene with almost non-
perceptible details (trees’ leaves and deers). 2
nd
row. City scene with high variability of temperature ranges (sky, cars and
people).
image.
We have considered the EMEE contrast metric,
or the measure of enhancement by entropy (Agaian
et al., 2001) to quantify the contrast improvement
when using BF&DDE, GF&DDE, or the proposed
TDDE filter. The EMEE metric has proven to pro-
vide a contrast measurement that is well adapted to
the human subjective analysis. This metric is also de-
fined from the Weber’s law, used in the design of γ
in eq. (9). Table 1 reports the result of the EMEE on
the scenes presented in Fig. 8. Although the TDDE
filter performs better in all cases, a subjective evalu-
ation might be needed to appreciate the improvement
of the TDDE filter compared to BF&DDE and/or
GF&DDE. We hence invite the reader to watch the
attached comparative videos. From these videos, it is
also noticeable how the proposed TDDE filter avoids
global brightness fluctuations from frame to frame as
a result of limiting the active data range, using tem-
poral statistical stabilization, when mapping the raw
IR image to 8 bit domain. To evaluate the global
Table 1: Evaluation of BF&DDE, GF&DDE, and the pro-
posed TDDE filter using the EMEE contrast metric.
BF&DDE GF&DDE TDDE
Forest scene
0.227 0.312 0.377
(1
st
row of Fig. 8)
City scene
0.219 0.216 0.554
(2
nd
row of Fig. 8)
brightness stabilization along time, we have consid-
ered the scene presented in Fig. 9 where a pedes-
trian crosses the street through the field-of-view of
the camera. The pedestrian is a large bright object
entering suddenly into the field-of-view of the cam-
era, which induces to a rapid change of the histogram
distribution. In Fig. 10 the time evolution of the mean
of the resulting O after applying the TDDE filter is
compared with the one resulting from BF&DDE and
GF&DDE. As can be observed, TDDE provides a
smoother change of the global brightness as well as
a significantly smoothed variation along time. How-
ever, the pedestrian is close to the saturation limit as
a result of preserving the global brightness level close
to the previous frame. This behaviour can be further
adjusted by tuning the α parameter in eq. (8).
Table 2 reports the performance evaluation of
BF&DDE, GF&DDE and the proposed TDDE filter.
As can be observed in the table, the TDDE filter per-
forms much faster than BF&DDE and/or GF&DDE,
which makes it a very promising choice for real world
applications.
Table 2: Running time detail to compute the 8 bit represen-
tation of the raw I shown in Fig. 2 (units are in ms).
Algorithm B D O Total
BF&DDE 55.26 6.63 4.06 65.95
GF&DDE 4.33 1.95 4.05 10.33
TDDE 4.28 0.47 10.54 15.55
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
150

(a) BF&DDE, (t = 0) (b) BF&DDE, (t = 160) (c) BF&DDE, (t = 226)
(d) GF&DDE, (t = 0) (e) GF&DDE, (t = 160) (f) GF&DDE, (t = 226)
(g) TDDE, (t = 0) (h) TDDE, (t = 160) (i) TDDE, (t = 226)
Figure 9: Comparison of global brightness temporal stability of DDE-based contrast enhancement methods.
Figure 10: Comparison of temporal stability of the histogram mean for BF&DDE, GF&DDE and TDDE.
5 CONCLUSIONS
A new detail enhancement technique for visualiza-
tion of HDR IR images has been presented. Sim-
ilarly to the most recent DDE-based filters, i.e.,
BF&DRP (Branchitta et al., 2009), BF&DDE (Zuo
et al., 2011), and GF&DDE (Liu and Zhao, 2014),
the proposed TDDE filter also splits the raw IR image
into base and detail image components. This in turn
enables for an independent and dedicated processing
to compress the HDR while enhancing quasi non-
perceptible image details. GF has been considered to
split the raw IR image. Indeed, in addition to signifi-
cantly reduce the amount of noise within the resulting
base image component, it presents a better behaviour
near edges (compared to BF) with a major advantage
of being suitable for real-time applications. Further-
more, the linear coefficients of the GF reflect the spa-
Real-timeVisualizationofHigh-Dynamic-RangeInfraredImagesbasedonHumanPerceptionCharacteristics-Noise
Removal,ImageDetailEnhancementandTimeConsistency
151

tial detail of the raw IR, allowing us to identify those
regions that are prominent to present noise. There-
fore, noise removal is addressed by masking the de-
tail image component with the GF linear coefficients.
We note that the fact of treating the detail image ac-
cording to the likelihood to present noise enables to
reduce the ε parameter of the GF and thus to preserve
finer details. Both base and detail image components
have been combined and converted to the 8 bit do-
main using a local adaptive gamma correction that has
been designed based on the Weber’s law. By doing
so, non-perceptible details in front of dark or bright
backgrounds are magnified to become perceptible by
the human eye in the resulting 8 bit image. It is in
this last stage where we have limited the active HDR
range computed through time in order to avoid global
brightness fluctuations from frame to frame. From the
experiments, we show that the TDDE filter effectively
addresses the compression of the HDR with a human
vision based enhancement of the image details. Noise
within uniform regions is almost suppressed and its
efficiency makes it a practical approach for real world
applications such as night vision for driver assistance
system or surveillance in security. As a future work,
we would like to investigate the possibility of com-
bining two dedicated GF to split the raw IR image in
order to better address noise removal and detail en-
hancement.
REFERENCES
Agaian, S., Panetta, K., and Grigoryan, A. (2001). Trans-
form based image enhancement with performance
measure. In IEEE Transactions on Image Processing,
pages 367–381.
Bradski, G. and Kaehler, A. (2008). Learning OpenCV:
Computer Vision with the OpenCV Library. O’Reilly
Media, 1st edition.
Branchitta, F., Diani, M., Corsini, G., and Porta, A. (2008).
Dynamic-range compression and contrast enhance-
ment in infrared imaging systems. Optical Engineer-
ing, 47(7):076401:1–14.
Branchitta, F., Diani, M., Corsini, G., and Romagnoli, M.
(2009). New technique for the visualization of high
dynamic range infrared images. Optical Engineering,
48(9):096401:1–9.
Durand, F. and Dorsey, J. (2002). Fast Bilateral Filtering for
the Display of High-Dynamic-Range Images. ACM
Trans. Graph., 21(3):257–266.
Glushko, S. W. and Salvaggio, C. (2007). Quantitative anal-
ysis of infrared contrast enhancement algorithms. In
Infrared Imaging Systems: Design, Analysis, Model-
ing, and Testing, pages 65430S:1–12.
He, K., Sun, J., and Tang, X. (2013). Guided Image Fil-
tering. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 35(6):1397–1409.
Karali, A. O., Okman, O. E., and Aytac, T. (2010). Adaptive
enhancement of infrared images containing sea sur-
face targets. In IEEE Signal Processing and Commu-
nications Applications Conference (SIU), pages 605–
608.
Kim, J. Y., Kim, L. S., and Hwang, S. H. (2001).
An advanced contrast enhancement using partially
overlapped sub-block histogram equalization. IEEE
Transactions on Circuits and Systems for Video Tech-
nology, 11(4):475–484.
Liang, K., Ma, Y., Xie, Y., Zhou, B., and Wang, R.
(2012). A new adaptive contrast enhancement algo-
rithm for infrared images based on double plateaus
histogram equalization. Infrared Physics and Tech-
nology, 55(4):309–315.
Liu, B., Wang, X., Jin, S., Chen, Y., Liu, C., and Liu, X.
(2012). Infrared image detail enhancement based on
local adaptive gamma correction. Chinese Optics Let-
ters, 10(2):021002:1–5.
Liu, N. and Zhao, D. (2014). Detail enhancement for high-
dynamic-range infrared images based on guided im-
age filter. Infrared Physics and Technology, 67:138–
147.
Pizer, S. M., Amburn, E. P., Austin, J. D., Cromartie, R.,
Geselowitz, A., Greer, T., Romeny, B. T. H., and Zim-
merman, J. B. (1987). Adaptive Histogram Equaliza-
tion and its Variations. Comput. Vision Graph. Image
Process., 39(3):355–368.
Silverman, J. (1993). Signal-processing algorithms for dis-
play and enhancement of ir images. In Infrared Tech-
nology, pages 440–450.
Vickers, V. E. (1996). Plateau equalization algorithm for
realtime display of highquality infrared imagery. Op-
tical Engineering, 35(7):1921–1926.
Zuiderveld, K. (1994). Graphics gems iv. In Heckbert,
P. S., editor, Image Processing, chapter Contrast Lim-
ited Adaptive Histogram Equalization, pages 474–
485. Academic Press Professional, Inc.
Zuo, C., Chen, Q., Liu, N., Ren, J., and Sui, X.
(2011). Display and detail enhancement for high-
dynamic-range infrared images. Optical Engineering,
50(12):127401:1–9.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
152
