
MAPTrack
A Probabilistic Real Time Tracking Framework by Integrating Motion,
Appearance and Position Models
Saikat Basu
1
, Manohar Karki
1
, Malcolm Stagg
2
, Robert DiBiano
1
,
Sangram Ganguly
3
and Supratik Mukhopadhyay
1
1
Department of Computer Science, Louisiana State University, 102F Electrical Engineering Building,
70803, Baton Rouge, Louisiana, U.S.A.
2
Remote Desktop Virtualization team, Microsoft Corporation, One Microsoft Way, 98052, Redmond, Washington, U.S.A.
3
Biosphere Science, Bay Area Environmental Research Institute/NASA Ames Research Center, Building - 19,
NASA Ames Research Center, 94035, Moffett Field, California, U.S.A.
Keywords: Object Tracking, Motion Model, Appearance Model, Gaussian Mixture Background Subtraction, Optical
Flow.
Abstract: In this paper, we present MAPTrack - a robust tracking framework that uses a probabilistic scheme to
combine a motion model of an object with that of its appearance and an estimation of its position. The
motion of the object is modelled using the Gaussian Mixture Background Subtraction algorithm, the
appearance of the tracked object is enumerated using a color histogram and the projected location of the
tracked object in the image space/frame sequence is computed by applying a Gaussian to the Region of
Interest. Our tracking framework is robust to abrupt changes in lighting conditions, can follow an object
through occlusions, and can simultaneously track multiple moving foreground objects of different types
(e.g., vehicles, human, etc.) even when they are closely spaced. It is able to start tracks automatically based
on a spatio-temporal filtering algorithm. A “dynamic” integration of the framework with optical flow allows
us to track videos resulting from significant camera motion. A C++ implementation of the framework has
outperformed existing visual tracking algorithms on most videos in the Video Image Retrieval and Analysis
Tool (VIRAT), TUD, and the Tracking-Learning-Detection (TLD) datasets.
1 INTRODUCTION
Tracking moving objects in a streaming video in real
time is important for many applications such as
video surveillance, activity recognition, robotics, etc.
A statistical method for parametric modeling of
object geometry as well as illumination changes
owing to variance in lighting conditions was
proposed in (Hager and Belhumeur, 1998).
However, their approach was only used particularly
in tracking human faces; no results are available for
videos involving objects having different types of
motion such as vehicles, humans, etc. that interact
with each other (closely) as is often the case in
surveillance videos. Moreno-Noguer et al (2008),
provide a Bayesian framework for combining
information obtained about appearance and object
geometry for robust visual tracking. However, their
framework cannot track multiple moving objects
simultaneously; in addition, it cannot handle
occlusions.
In this paper, we present a probabilistic real time
tracking framework that combines the motion model
of an object with its appearance and position. The
motion of the object is modeled using the Gaussian
Mixture Background Subtraction algorithm, the
appearance, by a color histogram and the projected
location of the tracked object in the image
space/frame sequence is computed by applying a
Gaussian to the Region of Interest. Our tracking
framework is robust to abrupt changes in lighting
conditions, can follow an object through occlusions,
and can simultaneously track multiple moving
foreground objects of different types (e.g., vehicles,
human, etc.) even when closely spaced. A spatio-
temporal filtering algorithm helps in automatic track
initialization and a “dynamic” integration of the
567
Basu S., Karki M., Stagg M., DiBiano R., Ganguly S. and Mukhopadhyay S..
MAPTrack - A Probabilistic Real Time Tracking Framework by Integrating Motion, Appearance and Position Models.
DOI: 10.5220/0005309805670574
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 567-574
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

framework with optical flow allows us to track
videos with significant camera motion. A C++
implementation of the framework has outperformed
existing visual tracking algorithms on most videos in
the Video Image Retrieval and Analysis Tool
(VIRAT), TUD (Andriluka et al, 2008), and the
Tracking-Learning-Detection (Kalal et al, 2010)
datasets.
2 RELATED WORK
A new particle filter - Kernel Particle Filter (KPF),
was proposed in the (Chang and Ansari, 2005) for
visual tracking for multiple objects in image
sequences. The idea proposed in (Williams et al,
2003) shows tracking using a single classifier SVM.
A boosting based approach was proposed in (Viola
and Jones, 2001) that used a cascade of classifiers
for object detection. However, it didn’t address the
problem of tracking objects through consecutive
frames of a video sequence. A spatio-temporal
tracking algorithm was proposed in (Lan and
Huttenlocher, 2004) that involved tracking
articulated objects in image sequences through self-
occlusions and changes in viewpoint. However, they
did not provide capabilities for automatic track
initialization or tracking multiple objects.
The TLD algorithm proposed in (Kalal et al,
2010) is the basis of one of the well-known
frameworks for tracking moving objects. The TLD
framework does not start tracks automatically; it
lacks a multi-object tracking feature. Also, TLD is
based on template matching and hence fails for
videos with multiple numbers of similar looking
objects (e.g., in the Indian driving scene video,
Figure 5). The approach proposed in (Maggio and
Cavallaro, 2005) uses color histograms as the only
feature. They use a cascade composition of a particle
filter and mean shift. The method proposed in
(Babenko et al, 2009) is similar to the approach
proposed in TLD. The difference between the work
reported in it and TLD is that they use multiple
instances as the positive examples in each frame.
However, like TLD, their framework does not start
tracks automatically as marking the location of the
object initially is a prerequisite. A Bayesian
estimation-based object tracking algorithm that takes
into account the motion models, shape and
appearance constraints has been proposed in (Tao et
al, 2002) but it fails when the motion layers are
infiltrated with clutter, occlusion etc. Another
method for detecting event sequences in surveillance
videos that is applicable only to low frame rate
videos is proposed in (Lombardi and Versino, 2011).
Our approach is based on using the motion
model, color histogram, and position information of
objects to track them with a recursive probabilistic
estimation of the composite model. Unlike the
previous approaches, it can simultaneously track
multiple moving objects, does not fail significantly
when there is no motion, or when the object is
occluded, is resistant to clutter, and is also able to
initialize tracks without human supervision.
Recently, there have been a lot of works that
combine multi object tracking, multi-person
tracking, and association between different tracked
objects for activity recognition (Oltramari and
Lebiere, 2012). Our framework tracks multiple
objects in a video in each frame or multiple frames
efficiently; this capability could be used as a part of
a co-related and collective activity recognition
framework.
Figure 1: Schematic representation of our approach.
3 THE PROPOSED APPROACH
Figure 1 shows the schematic of our approach. First,
a moving object must be automatically identified as
part of the foreground. This involves track
initialization at particular pixels on the subsequent
frames that have a higher probability of being part of
the moving foreground object. This is achieved by -
1) stabilizing the image and 2) feeding the stabilized
image to the spatial and temporal filtering
algorithms described below. Issues such as camera
instability (shaking, panning, rotating) come into
play and require image stabilization for the tracking.
These issues and the components of the tracking
framework are described in detail below.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
568

3.1 Image Stabilization
In order to stabilize an incoming streaming video,
we use an iterative algorithm which attempts to hold
each background pixel in the same position
regardless of lateral and rotational camera motion:
1. Apply Shi and Tomasi's edge-finding
algorithm to the first frame to identify significant
feature points in the image.
2. For each subsequent frame, apply Lucas-
Kanade optical flow to track the motion of the
features identified by Shi and Tomasi's algorithm,
refreshing the feature points when necessary.
3. With increasing precision for each iteration:
(a) For each angle of rotation in a certain range,
determine the translation of each point.
(b) Find the most common translation/rotation
(mode) pair (Ө, x) and (Ө, y) of all the features.
4. Warp the image to adjust for the total mode of
the motion.
Before adjusting for background motion, we
must identify features of the frame; to do so, we use
the Shi-Tomasi method (Shi and Tomasi, 1994). The
Shi-Tomasi method detects features such as corners
and edges by approximating the weighted sum of
squares of image patches shifted by certain values.
Next, we apply a pyramidal Lucas-Kanade
method (Lucas and Kanade, 1981) for determining
optical flow at each point of interest. We then find
the mode of the resulting flow value pairs, including
rotation, by placing the pairs in bins. At every
iteration, the bin widths are decreased, yielding an
increasingly accurate estimate of the motion. The
image is then adjusted to account for the determined
background movement. When the image is stabilized
in this manner, fewer false foreground objects
detected and correct coordinates of objects are also
maintained.
3.2 Automated Track Initialization
The automated track initialization algorithm based
on a confidence-based spatio-temporal filtering
algorithm first detects blobs using the GM
Background Subtraction method (KaewTraKulPong
and Bowden, 2002). This yields difference images,
which are fed into the spatial filtering module.
3.2.1 Noise Removal through Morphological
Operations
The image obtained through the background
subtraction algorithm is initially opened and then
closed by a structuring element with diameter λ
pixels to filter out unnecessary noise. λ depends
upon the scale of the video.
3.2.2 Spatial Filtering
Once blobs are detected in the difference images,
they are filtered according to their spatial features.
Scale information available from the metadata
accompanying the videos is used to filter blobs
specifically based on their area and orientation. The
filtered blobs are then passed as input to the
temporal filtering algorithm below.
3.2.3 Temporal Filtering
To filter blobs in the temporal domain we use a
confidence measure. Each blob has a confidence
measure δ associated with it. δ is initially 0 and
increases as a blob is detected across successive
frames.
The probabilistic framework that we present
takes into account three parameters namely, the
motion of the object modeled using the Gaussian
Mixture Background Subtraction algorithm, the
appearance of the tracked object, using a color
histogram, and the projected location of the tracked
object in the image space/frame sequence computed
by applying a Gaussian to the Region of Interest.
3.2.4 Defining an Adaptive Threshold
If the confidence value for a blob exceeds a
specified upper threshold σ, a track is started on it.
The moment the confidence value for a blob falls
beneath a lower threshold τ, the corresponding
object is discarded. If the confidence value is
between σ and τ, the corresponding blob is
maintained in the list of prospective tracks. For
videos that have higher noise, clutter and random
changes in lighting conditions, as is often the case
for outdoor videos taken from moving cameras, the
upper threshold value σ is set higher. On the other
hand, for videos with more stable conditions σ is set
lower because of the lesser probability of
encountering random classification noise.
The composite confidence update equation is as
follows:
δ = (0.5
-n
) ∨ (-0.5
-n
)
(1)
3.3 The MAPTrack Framework
Motion – The Gaussian Mixture Background
subtraction method helps in determining the
positional estimates for all moving objects in the
MAPTrack-AProbabilisticRealTimeTrackingFrameworkbyIntegratingMotion,AppearanceandPositionModels
569

scene. It is reasonable to consider all moving objects
to be a part of the foreground. Our framework builds
a background model of Gaussians, with a mean and
standard deviation for each pixel. If a new pixel does
not fit well with the Gaussians, it is considered to be
part of the moving foreground.
Appearance – The appearance of any object in a
scene is another important parameter in visual
tracking. Object appearance can be modeled using
the color histogram associated with it. Operationally,
the motion image is used as a mask to create
histograms of object pixels for each ROI.
Histograms are implemented as 3D RGB histograms
with 32 bins in each R, G, and B direction. For
example, bin(0,0,0) contains R=0 to 7, G=0 to 7,
B=0 to 7, etc.
Histograms are created for foreground (h
fg
) and
background (h
bg
) components of the current motion
image at the current frame. Each bin in a current
histogram contains the count of the pixels, which fall
in that bin. The background histograms are
normalized to make the count of pixels in each equal
to the number of foreground pixels in the motion
image:
|
|
|
|
(2)
So, both foreground and background image have
magnitude equal to the number of foreground pixels
in the motion image (e.g. when the object is stopped,
both current-frame histograms have 0 magnitude).
The cumulative histograms (H
fg
and H
bg
) are updated
using a running average:
1
(3)
where, n is minimum of the current frame number
and the point at which the average will change to
exponential decay and
is the cumulative histogram
value from the last frame.
A probability image is created for the pixels in
the ROI from the Bayes equation:
|
ẑ
ẑ
|
ẑ
ẑ
ẑ
ẑ
1
P(x,y) = 1 if P(FG|ẑ)>0.5, else 0 (4)
where, avgFG is the sum of the motion history
image described below. In other words, if a pixel
color is more likely to lie in the object foreground, it
will be ‘1’. Otherwise it will be ‘0’.
Projected Position – The estimate of the
projected position of an object over an image
sequence is another determining factor in visual
tracking. The position is estimated using the
previous position and estimated velocity:
́
(5)
where,
is calculated as:
(6)
Here, f
0
is the nearest previous frame where the
object is at a distance of at least 1 ROI width from
current position if it exists and max(0, f-150),
otherwise.
is the position at that frame.
A positional probability image for the ROI is
created using a conical shape.
,
(7)
where, (
,
) is the center of the ROI, max is the
probability value at the center that is equal to 1, and
min is the probability at the edges.
Figure 2: a) R b) Motion Image c) Color Hist. Image d)
Position Image.
This image represents the estimated position or
velocity of the object, and reduces movement from
this estimated location. Thus, the probability is
highest where the object is most likely to be present
(in the center).
In addition, a motion history image is created to
estimate the probable object shape, size, and location
within the ROI. Similar to the color histograms, it is
updated as:
1
1
1
(8)
where,
1
,, and
∑
as a scale factor
based on the amount of movement present. N is
again the point at which the average will change to
exponential decay. MC is the image of all moving
pixels in the ROI matching the foreground color, as
determined by the color histogram, of the object. T
represents all the pixels in ROI. Each of the Motion,
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
570

Color, and Positional probability images is centered
over the estimated position calculated above. Once
the images are obtained, they are combined into a
composite probability image (CPI) by using the
following equation:
,
,
(9)
Here, σ
1,
σ
2
and σ
3
are parameters that determine the
relative weights given to the Motion, Color
histogram, and Positional Probability images
respectively towards the Composite Probability
Image I. Intuitively, equation 9 is a recursive OR
over the values
MCP
,
CP
and
P
where the
CP
or
P
parts are used only when the
M
value is 0 and
P
is used only when both
M
and
C
are 0. It should be
noted that
MCP
uses the conical probability
image for
P
, to utilize any motion of matching color
within the ROI, whereas
CP
uses the motion
history image for P, such that still background of a
matching color will not cause a track loss.
Since the motion probability image is the most
important parameter for object tracking,
MCP
is
assigned the highest weight. The color histogram
probability image is less important, followed by the
positional probability image. In fact, we found that
the
P
image alone does not work well to deal with
occlusions due to the effective velocity of the object
decreasing immediately before an occlusion.
The occlusion detection algorithm described
below is instead used to handle occlusions and
changing lighting conditions. Finally, the mean shift
algorithm is used to compute the actual position of
the object by shifting the estimate to the new Center
of Mass (COM) of the current observation. The
mean shift equation is given in equation 10.
)
(10)
where, Pos
act
(f) is the actual position computed at
frame
, Pos
est
(f) is the estimated position at frame f
and COM(f) is the Center of Mass used by the mean
shift algorithm for estimating the actual position of
the object at frame f.
So, the mean shift gives the posterior probability
distribution given the prior and the likelihood
function. The positional estimate for the actual
object location generated by the mean shift
algorithm for a given frame f is used to compute the
positional estimate for the next frame f+1 according
to equation 5 and the system continues.
Occlusion Detection – The problem with using
the position probability image (
P
) to handle an
occlusion was primarily due to the decreasing
effective velocity (since the occluded edge is not
effectively moving, the velocity of the center of
mass effectively reduces) of the object prior to the
occlusion since the partially occluded center of mass
moves at approximately half of the actual velocity of
the object. Since
P
would only be used where
MCP
and
CP
are very small, a metric is instead
used to detect an occlusion:
∑
∑
(11)
Figure 3: Foreground and Background Color Histograms
of the two cars.
CP
motionhistory
is the estimate of the amount of color
matching in the object foreground, and
C
is the
amount of matching color in all of the ROI. Thus,
will be small when either the amount of color
in the object is small, or the amount of matching
color in the background is very large. An occlusion
is detected if:
(12)
where,
is a frame number between f
0
and with
being the current frame and f
0
the nearest frame
where the object is at least one ROI width distance
from the current position, or max(1,
-150) if that
doesn’t exist, and
t
occ
is the threshold for occlusion.
When an occlusion is detected, the velocity from
frame f
0
is used as an estimate of the current
velocity, and the current position is adjusted to
reflect that velocity:
(13)
This estimated velocity remains the same while the
object is occluded. The ROI is allowed to drift up to
half its length from the estimated position towards
the center of mass while occluded to allow it to jump
to the object when it is again present. The occlusion
is ended when significant motion of matching color
is again present:
MAPTrack-AProbabilisticRealTimeTrackingFrameworkbyIntegratingMotion,AppearanceandPositionModels
571

∑
∑
τ∗
(14)
where, τ is the threshold to end the occlusion,
currently set to 0.3. If the occlusion does not resolve
within 150 frames of 3 ROI widths, whichever is
smaller, the track is ended.
4 IMPLEMENTATION DETAILS
The tracking algorithm was implemented in C++
using the OpenCV library for real-time computer
vision. The experiments were conducted on an Intel
I5 machine with 6 gigabytes of memory.
Figure 4: Output from MAPTrack (Left) and TLD (right).
5 RESULTS AND COMPARATIVE
STUDIES
We compare results from our tracker against existing
trackers whose outputs are available at the publicly
available TLD dataset (Kalal et al, 2010). Table 1
shows the different states of the tracked object
inferred at different values for the Motion, Color and
Positional Probability images. Table 2 gives the
number of frames up to the first track loss for the
TUD dataset (Andriluka et al, 2008). It can be seen
that MAPTrack outperforms the TUD Detector on
both categories of the TUD Dataset. Table 3 shows
the number of frames after which the trackers lost
track for the first time. MAPTrack outperforms other
trackers in all of the cases (except motocross). TLD
is based on template matching and hence fails for
videos with multiple similar looking objects. This is
illustrated in Figure 4 where TLD switches tracks
arbitrarily between similar looking foreground
objects whereas MAPTrack keeps tracking a
particular object for the entire time frame of its
visibility. We also compare our tracker against the
TUD Pedestrian Detector (Andriluka et al, 2008) for
multi-object tracking. The performance metric used
was taken from in (Smith et al, 2005). Figure 7
shows the ROC curve for the tracker and Figure 8
shows the results from MAPTrack. Table 4 lists the
results for occlusion on videos from the VIRAT
public dataset available online (VIRAT).
Table 1: The different states of the tracked object.
Motion Color
Histogram
Projected
Position
Inferred
State
0 0 0 Lost Track
0 0 1 Occlusion
0 1 0 Wrong Object
0 1 1 Stopped
1 0 0 Wrong Object
1 0 1 Wrong Object
1 1 0 Wrong Object
1 1 1 Moving
Object
Figure 5: MAPTrack results for TUD videos.
Table 3: Comparison of single-object trackers in (Kalal et al, 2010) with MAPTrack.
Algorithms
Jumping
(frames=313)
Car
(frames=45)
Motocross
(frames=2665)
Car chase
(frames=9928)
Panda
(frames=3000)
Beyond semi-supervised 14 28 6 66 130
Co-trained Generative-
Discriminative
11 34 1 1 1
“CVPR” results 96 29 59 334 358
Online Multiple
Instance Learning
313 220 63 321 992
Online Boosting 26 545 - - -
Semi-Supervised On-
line Boosting
21 652 59 190 83
TLD 313 802 173 244 277
MAPTrack 313 821 162 402 2568
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
572
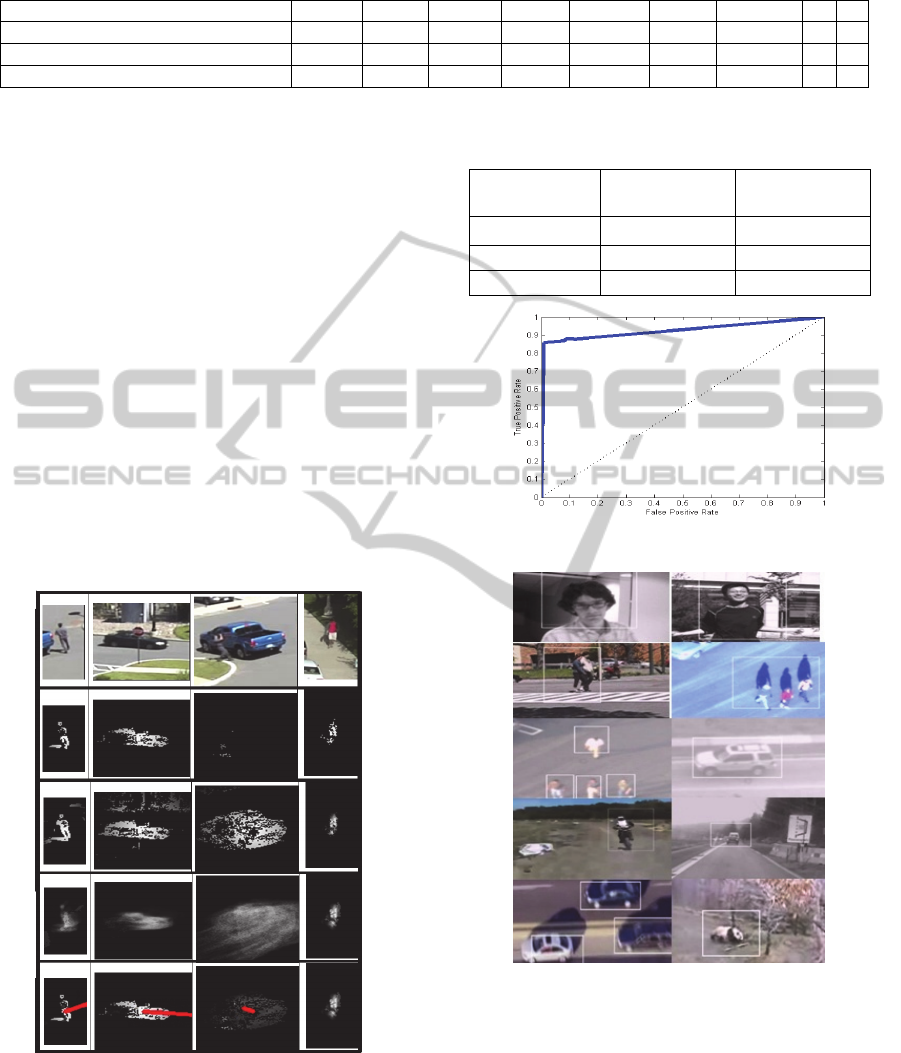
Table 4: Results from the tracker (Metric used as in (Smith et al, 2005)).
Video Duration CD MO MT FP TP Occlusions TP FP
VIRAT_S_010000_01_000184_000324 1m 49s 1.3823 0.036145 0.039078 0.008117 0.86488 20 16 3
VIRAT_S_040003_02_000197_000552 5m 54s 1.0281 0.020574 0.068743 0.007356 0.8692 25 21 4
VIRAT_S_050000_05_000696_000732 0m 35s 4.0775 0.089407 0.047252 0.007937 0.73795 3 3 0
6 CONCLUSIONS
We presented a robust tracking framework that uses
a probabilistic scheme to combine a motion model
of an object with that of its appearance and an
estimation of its position. Our tracking framework is
robust to abrupt changes in lighting conditions, can
follow an object through occlusions. The track starts
automatically based on a spatio-temporal algorithm.
It can also simultaneously track multiple moving
foreground objects of different types (e.g., vehicles,
human, etc.) even when they are closely spaced. A
“dynamic” integration of the framework with optical
flow allows us to track videos resulting from
significant camera motion.
We plan to use the results generated by the
tracking algorithm to infer trajectory-based events
like vehicle turns as well as other complex events
like accidents and traffic violations.
Figure 6: Image of people and cars, the images are the
ROI images, followed by MCP, CP, Velocity Image and
the Weighted Composite Image from top to bottom.
Table 2: Tracker results for TUD (Andriluka et.al, 2008).
Campus
Correct (False)
Crossing
Correct (False)
Expected 303 1008
TUD Detector 227 (0) 692 (7)
MAPTrack 255 (0) 723 (5)
Figure 7: ROC curve for the tracker.
Figure 8: Results from MAPTrack.
ACKNOWLEDGEMENTS
This work has been partially supported by Army
Research Office (ARO) under grant number
W911NF-10-1-0495. Any opinions, findings, and
conclusions or recommendations expressed in this
material are those of the authors and do not
MAPTrack-AProbabilisticRealTimeTrackingFrameworkbyIntegratingMotion,AppearanceandPositionModels
573

necessarily reflect the views of the ARO or the
United States Government.
REFERENCES
Andriluka, M., Roth, S., & Schiele, B. (2008, June).
People-tracking-by-detection and people-detection-by-
tracking. In Computer Vision and Pattern Recognition,
2008. CVPR 2008. IEEE Conference on (pp. 1-8).
IEEE.
Babenko, B., Yang, M. H., & Belongie, S. (2009, June).
Visual tracking with online multiple instance learning.
In Computer Vision and Pattern Recognition, 2009.
CVPR 2009. IEEE Conference on (pp. 983-990).
IEEE.
Chang, C., & Ansari, R. (2005). Kernel particle filter for
visual tracking. Signal processing letters, IEEE, 12(3),
242-245.
Hager, G. D., & Belhumeur, P. N. (1998). Efficient region
tracking with parametric models of geometry and
illumination. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 20(10), 1025-
1039.
Kalal, Z., Matas, J., & Mikolajczyk, K. (2010, June). Pn
learning: Bootstrapping binary classifiers by structural
constraints. In Computer Vision and Pattern
Recognition (CVPR), 2010 IEEE Conference on (pp.
49-56). IEEE.
KaewTraKulPong, P., & Bowden, R. (2002). An improved
adaptive background mixture model for real-time
tracking with shadow detection. In Video-Based
Surveillance Systems (pp. 135-144). Springer US.
Lan, X., & Huttenlocher, D. P. (2004, July). A unified
spatio-temporal articulated model for tracking.
In Computer Vision and Pattern Recognition, 2004.
CVPR 2004. Proceedings of the 2004 IEEE Computer
Society Conference on (Vol. 1, pp. I-722). IEEE.
Lombardi, P., & Versino, C. (2011). Learning to Detect
Event Sequences in Surveillance Streams at Very Low
Frame Rate. In Machine Learning for Vision-Based
Motion Analysis (pp. 117-144). Springer London.
Lucas, B. D., & Kanade, T. (1981, August). An iterative
image registration technique with an application to
stereo vision. In IJCAI (Vol. 81, pp. 674-679).
Maggio, E., & Cavallaro, A. (2005, March). Hybrid
Particle Filter and Mean Shift tracker with adaptive
transition model. In ICASSP (2) (pp. 221-224).
Moreno-Noguer, F., Sanfeliu, A., & Samaras, D. (2008).
Dependent multiple cue integration for robust
tracking. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 30(4), 670-685.
Oltramari, A., & Lebiere, C. (2012). Using ontologies in a
cognitive-grounded system: automatic action
recognition in video surveillance. In Proceedings of
the 7th international conference on semantic
technology for intelligence, defense, and security,
Fairfax.
Shi, J., & Tomasi, C. (1994, June). Good features to track.
In Computer Vision and Pattern Recognition, 1994.
Proceedings CVPR'94., 1994 IEEE Computer Society
Conference on (pp. 593-600). IEEE.
Smith, K., Gatica-Perez, D., Odobez, J. M., & Ba, S.
(2005, June). Evaluating multi-object tracking.
In Computer Vision and Pattern Recognition-
Workshops, 2005. CVPR Workshops. IEEE Computer
Society Conference on (pp. 36-36). IEEE.
Tao, H., Sawhney, H. S., & Kumar, R. (2002). Object
tracking with bayesian estimation of dynamic layer
representations. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 24(1), 75-89.
Viola, P., & Jones, M. (2001). Rapid object detection
using a boosted cascade of simple features.
In Computer Vision and Pattern Recognition, 2001.
CVPR 2001. Proceedings of the 2001 IEEE Computer
Society Conference on (Vol. 1, pp. I-511). IEEE.
Virat Public Dataset: http://viratdata.org/
Williams, O., Blake, A., & Cipolla, R. (2003, October). A
sparse probabilistic learning algorithm for real-time
tracking. In Computer Vision, 2003. Proceedings.
Ninth IEEE International Conference on (pp. 353-
360). IEEE.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
574
