
VR based Collaborative Errorless Learning System using Humanoid
Avatar for People with Alzheimer’s Disease
Takehiko Yamaguchi
1
, Yuta Yamagami
2
, Toshihiko Sato
2
, Hibiki Fujino
2
, Tetsuya Harada
1
,
Debora Alexandora Foloppe
3,4
, Paul Richard
4
and Philippe Allain
3,5
1
The Department of Appliced Electronics, Tokyo University of Science, Niijuku6-3-1, Katsushikaku, Tokyo, Japan
2
Faculty of Industrial Science and Technology Applied Electronics, Tokyo University of Science, Niijuku6-3-1,
Katsushikaku, Tokyo, Japan
3
Laboratoire de Psychologie des Pays de Loire (UPRES EA 4638), Université d’Angers, Angers, France
4
Laboratoire Angevin de Recherche en Ingénierie des Systèmes (EA 7315), Université d’Angers, Angers, France
5
Unité de Neurologie, Département de Neurologie, CHU d’Angers, Angers, France
Keywords: Errorless Learning, Alzheimer’s Disease, Virtual Agent, Collaborative Cognition, Mind-Wandering.
Abstract: Everyday action impairment is one of the diagnostic criteria of Alzheimer’s disease and is associated with
many serious consequences, including loss of functional autonomy and independence. It has been shown
that the (re)learning of everyday activities is possible in Alzheimer’s disease by using errorless learning
approaches. The purpose of this study is to propose a newly revised Virtual Kitchen system that allows
training of everyday activities to integrate a new approach of errorless learning (EL) framework using
collaborative learning with a virtual agent. In this paper, we describe a concept of the proposed framework,
as well as explore user’s attention change to analyse eye tracking data during a training task in order to
review the effectiveness of the proposed EL framework.
1 INTRODUCTION
1.1 Everyday Activities Intervention
Everyday activities are familiar tasks that require
multiple cognitive processes such as serial ordering
of task steps and object selection, in order to achieve
practical goals such as preparing a cup of coffee,
making a sandwich, and so on. Usually these
familiar tasks are routinely performed with
subjective ease in real life. However, in people with
brain damage, errors are frequent and sometimes
may preclude the achievement of the task goal
(Chevignard et al., 2008; Fortin et al., 2003). In fact,
everyday action impairment is one of the diagnostic
criteria of Alzheimer’s disease as well as is
associated with many serious consequences such as
institutionalization, depression, and death (Adam et
al., 2000; Hargrave et al., 2000; Noale et al., 2003).
In a common approach to prevent these dire
consequences, neuropsychologists suggest that
patients with dementia learn or relearn instrumental
activities of daily living to increase the patients’
functional autonomy (Giovannetti et al., 2007;
Dechamps et al., 2011). To date, research on
everyday action interventions for people with
dementia has shown that repetition of everyday
activities improves performance on trained tasks
(Avila et al., 2004; Farina et al., 2002).
1.2 VR based Intervention
Today, there are no doubts that (re)learning methods
have beneficial effects for patients with Alzheimer’s
disease especially when they have explicit memory
deficits. However, conventional methods are not
always feasible in typical clinical settings.
Virtual reality (VR) based technology is one of
the emerging tools that has great potential for use in
rehabilitation (Le Gall et al., 2008). VR is a
technology that allows people to view, touch,
navigate, as well as interact with a computer-
generated three-dimensional world in real time. In
addition, Virtual environments allow people to be
engaged in activities as in the real world (Broeren et
al., 2008). In the domain of everyday activities,
several virtual environments have been developed to
462
Yamaguchi T., Yamagami Y., Sato T., Fujino H., Harada T., Alexandora Foloppe D., Richard P. and Allain P..
VR based Collaborative Errorless Learning System using Humanoid Avatar for People with Alzheimer’s Disease.
DOI: 10.5220/0005313904620469
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 462-469
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

simulate daily tasks, namely cooking (Allain et al.,
2011; Richard et al., 2010; Zhang et al., 2002) as
well as shopping (Klinger et al, 2006). In fact, VR
allows intensive repetition of meaningful tasks with
augmented feedback for rehabilitation (Crosbie et
al., 2012).
Since no study so far has captured the scope to
create a virtual environment specifically designed
for the (re)learning of everyday activities in patients
with Alzheimer’s disease, we have designed a dual
modal VR application which allows patients with
Alzheimer’s disease to practice everyday activities:
Virtual Kitchen (VK) system (Yamaguchi et al.,
2012). In the previous study, we have developed the
VK for use as an intervention tool to treat everyday
cooking deficits in patients with Alzheimer’s
disease, as well as examined the effectiveness and
usability.
1.3 Virtual Kitchen System
Previous VK system was designed as a dual modal
VR platform. The system was composed of one
notebook PC, a mouse, a headset, and the VK
application, which runs on the PC. The system was
designed to be as simple as possible in order to make
it portable and to facilitate setup. The application
was visually implemented in a 3D environment in
order to make it immersive as well as improve the
reality of the system. As for the interaction
technique with the system, 2D mouse interaction
was supported for patients since it was the most
common and usual interaction model for them and
since the system focuses on cognitive performance
but not on motor abilities, we decided to control the
vertical and horizontal position of objects in the 3D
environment.
The VK application consisted of (re)learning
everyday tasks, especially cooking tasks such as
preparing two pieces of toast for breakfast using an
electric toaster (breakfast task); and preparing a cup
of coffee with a coffee machine (coffee task). The
breakfast task trains subjects how to prepare two
pieces of toast in everyday life. It contains seven
manipulable visual objects: a toaster, two pieces of
bread, two spoons of jam, and two pats of butter. As
for the coffee task, it trains subjects how to prepare a
cup of coffee with a coffee machine in everyday life.
The coffee task also contains seven manipulable
visual objects: a coffeemaker, a coffee filter, ground
coffee, a coffeepot, a water pot, sugar cubes, and a
milk carton. In both tasks, these seven objects can be
manipulated with the mouse. To finish both tasks, a
total of 10 manipulations were severally required.
1.4 (Re)Learning Methods
In the previous VK system, we focused on
developing two cooking tasks as descried above on a
dual modal VR platform with integration of two
(Re)learning methods: Written Instruction Learning
Method (Written ILM), and Self-Recorded
Instruction Learning Method (Self-Recorded ILM).
Both methods provide step-by-step written
instructions to achieve the applied task. These
instructions were proposed to reduce errors during
(re)learning. Written ILM was based only on written
instructions, while the Self-Recorded ILM combined
written ILM with verbal repetition of instructions.
In fact, written and/or verbal instructions
approaches have proven to be successful in patients
with action disorganization problems (Bickerton et
al., 2006). Such approaches could be very helpful to
guide their actions. However, this approach could
only provide errorful learning which is not
associated with an avoidance of errors during
leaning.
1.5 Errorless Learning
Errorless learning (EL) is one of the effective
learning methods for everyday activities intervention.
The EL allows teaching techniques that prevent
people from making mistakes during learning
process (Dechamps et al., 2011).
Some recent studies suggest that errorless learning
principles may be beneficial in memory
rehabilitation for people with dementia (Dunn &
Clare, 2007). In addition, EL has been applied in
developing practical interventions for people with a
range of disabilities so that recently EL has been an
important focus of interest for researchers interested
in memory processes (Clare & Jones, 2008).
1.6 VR based Errorless Learning
Although there are many evidences based studies
and successful cases that support the use of the EL,
usually EL approaches are conducted by therapists,
but not by system operation. On reviewing the
literature, we found a few studies on the EL
approach implemented in VR environments. For
instance, Connor et al tested the effectiveness of
their errorless learning system using haptic guidance
with patients with post-stroke visuo-perceptual
deficits. In their errorless learning condition
unproductive or incorrect approaches to objects
within a virtual environment are prevented by
applying a ‘force field valley’ when the patient take
VRbasedCollaborativeErrorlessLearningSystemusingHumanoidAvatarforPeoplewithAlzheimer'sDisease
463

a wrong direction (Connor et al., 2002). Kober et al.
developed VR based neurologic rehabilitation
system for patient with spatial disorientation. Their
EL system was designed by means of verbal
feedback from the experimenter when patients took
a wrong route during navigating in virtual scenarios
(Kober et al., 2013). At least according to the related
studies, researchers focus on how well instruction
provide from the system helps a patient better
understand his or her performance, as well as how
patient’s error behaviour can be prevented by using
multimodal VR interaction when they make an error
during rehabilitation task.
In fact, typical algorithm of the EL usually
consists of a couple of processes: “(a) breaking
down the target task into small to discrete steps or
units; (b) providing sufficient models or instruction
before a patient is asked to perform the target task;
(c) encouraging the patient to avoid guessing; (d)
immediately correcting errors, and (e) carefully
fading prompts” (Sohlberg et al., 2005). As the point
of view of the system requirement when designing
an EL framework, it should be considered that not
only the typical process of the EL, but also (1) how
well patient’s attention can be induced to the
instruction and the target task, (2) how naturally
patient’s motivation can be created for them to
conduct the target task, (3) how naturally patient’s
error behaviour can be predicted, as well as (4) how
effectively prompts can be reduced.
In this paper, we propose a newly revised VK
system to integrate an EL framework for (re)learning
of everyday activities in patients with Alzheimer’s
disease. The proposed EL framework was designed
to achieve these requirements as described above.
We present an implemented prototype system as
well as the effectiveness of the system’s capability.
2 PROPOSED SYSTEM
2.1 Requirements Analysis
The purpose of the requirements analysis process is
to define the functionalities needed in the proposed
EL framework. Four main requirements of the
proposed framework were actually extracted based
on the discussion in the previous section: (1) control
a visual attention of a patient, (2) create a natural
situation in which a patient can be motivated into an
applied task, (3) predict a patient’s error behaviour,
as well as (4) adaptively provide a level of prompt
based on patient’s progress. To achieve these
requirements, we decided to develop an EL
framework based on a collaborative learning
environment with a humanoid avatar which is a
virtual agent controlled by an artificial intelligence
(AI) technique.
Figure 1: System framework of the proposed VK system.
Humanoid agent has a capability of supporting
learning activities through improving learner’s
emotional state such as engagement as well as
motivation (Soliman & Guetl, 2011). Using
collaborative learning with the avatar, requirements
(1), (2) can be achieved. In terms of requirement (3),
error behaviour detection framework is considered.
Concerning requirement (4), dynamic difficulty
level adaptation framework is considered (Figure 1).
In addition, we revised the interaction technique
with the proposed VK platform using Leap motion
device, which is a sensor device that supports hand
and finger motion as input, to facilitate natural
communication with the humanoid avatar.
2.2 System Framework
The prototype system is composed of a desktop PC,
a PC monitor and Leap motion controller (Figure 2).
In this paper, four main frameworks are described in
detail such as a Task management framework, an
Interaction technique management framework, an
Avatar control framework, and an Error behaviour
detection framework.
2.2.1 Interaction Technique Management
Framework
This framework enables to control a hand avatar
which tracks the user’s hand gesture using the
connected Leap motion controller. The position and
orientation data of the user’s hand are updated at
about 125Hz. However, since the data confidence of
the Leap motion becomes low due to a tracking error
and self-occlusion, the orientation data of the user’s
hand avatar is fixed while grabbing some
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
464

manipulable object to improve the usability of the
hand avatar.
Figure 2: System configuration of the VK system.
2.2.2 Task Management Framework
This framework currently enables to manage a
coffee making task. The screen shot of the coffee
making task is shown in the Figure 3. The coffee
making task contains seven manipulable visual
objects such as a coffeemaker, a coffee filter, ground
coffee, a coffeepot, a water pot, sugar cubes, and a
milk carton. These seven objects can be manipulated
with the hand avatar. To finish the tasks, a total of
10 manipulations were required as shown below.
1. Press the blue button on the coffee maker to
open the filter door.
2. Set a coffee filter in the filter door.
3. Pour the ground coffee into the filter door.
4. Press the blue button again to close the filter
door.
5. Pour the water from water pot into the coffee
maker.
6. Set the coffee pot on the warming plate.
7. Press the red button on the coffee maker to
make coffee.
8. Pour the coffee from the coffee pot into the
coffee cup.
9. Put a cube sugar from the sugar plate into the
coffee cup.
10. Pour the milk from the milk carton into the
coffee cup.
2.2.3 Avatar Control Framework
The humanoid avatar in the VK platform is
controlled by AI technique which is running on the
Avatar control framework. Figure 4 shows that
information flow between AI and the environment.
AI is running on the background of the main task. AI
has a sensor module which allows obtaining
environmental parameters such as a current task
status, task success/failure, distances to each object,
as well as position/orientation of the user’s hand
avatar.
Figure 3: Screenshot of the coffee making task.
The AI control module consists of three components
such as a Knowledge making component, a Decision
making component, and a Motion making
component. Obtained information through the sensor
module is recognized in the Knowledge making
component to analyse patient’s behaviour as well as
current task status. The result from the Knowledge
making component is updated in the Database to
share it with other components.
Figure 4: Information flow between AI and the virtual
environment.
Depending on the result from the Knowledge
making component, next operation of the avatar is
decided by the Decision making component as well
as by the Motion making component to update an
operation mode of the avatar which consists of three
operation modes: a Collaborative operation mode, an
Inductive operation mode, and a Leading operation
mode. In fact, these operation modes could be a key
concept for designing collaborative learning
environment.
The Inductive operation mode is a set of avatar’s
behaviour that allows indicating the next task for a
patient to achieve. When a task begins, the avatar
VRbasedCollaborativeErrorlessLearningSystemusingHumanoidAvatarforPeoplewithAlzheimer'sDisease
465

immediately moves to a target object. For example,
if the applied task is the trial 2 (See 2.2.2 section),
the avatar moves to the coffee filter and then
performs an inductive behaviour (the avatar jumps
up and down, or shakes the hand) to encourage a
patient to conduct the target task. When it succeeds
to indicate patient’s attention to the target task, the
avatar’s behaviour is changed to the Collaborative
operation mode.
Figure 5: Collaborative operation of the avatar.
When the avatar is in the Collaborative operation
mode, first, the avatar tries to achieve a target task
alone (Figure 5). For example, if the target task is
trial 2, the avatar tries to push the filter, however it
does not move after all. In this situation, the avatar is
asking for somebody’s help. This situation actually
was designed to encourage patient’s helping
behaviour to the avatar. With this approach, we
designed a natural situation in which a patient to be
motivated into an applied task. If it fails to indicate
patient’s attention to the target task, the Leading
operation mode is applied to demonstrate a model
prompts of the target task by the avatar.
2.2.4 Error Behaviour Detection
Framework
This framework is independently working as part of
the sensor module in the Avatar control framework.
This framework enables to analyse hand avatar’s
trajectory as well as velocity distribution to predict
error behaviour of a patient. According to the motor
control theory, arm movement can be estimated
using minimum Jerk model. We simply integrated
this model to estimate avatar’s trajectory.
3 SYSTEM EVALUATION
The goal of this evaluation was to explore how
different eye movement patterns can inform us about
cognitive activities between subjects with and
without the avatar communication during the coffee
making task. The following section describes the
selected participants, the materials, the procedure
and the data analysis of this evaluation.
3.1 Subjects
15 men and 1 women aged 21 to 25 were recruited
through the Tokyo University of Science to
participate in this study (age M = 22; SD = 1.20).
All subjects were used to handle computers;
however none of them had experience playing video
games.
3.2 Material
The experimental setup consisted of a PC (Intel Core
i7-4770 CPU with 3.40 GHz) with a 21.5" BenQ
screen (1920x1080), and a leap motion controller.
The virtual environment was developed using the
system Unity 4.5 which was the game development
platform. Tobii X2-30 eye tracking system was used
to measure their eye movement patterns during the
experiment. The eye tracker was attached under the
display.
3.3 Procedure
Each participant tried out all two coffee making
tasks with/without the avatar communication in a
counterbalanced order. The subjects were seated in
front of a screen monitor and first received general
verbal information about the evaluation, the learning
method, and the use of the VK system.
The subjects received two pre-training sessions
to familiarize them with the method (i.e., with the
avatar or without the avatar). They were in the same
condition as the learning condition. The pre-training
sessions were designed to familiarize them with the
use of the Leap motion controller and the visual
instructions. After these two pre-training sessions,
the subjects were given a learning session, during
which a task was performed using with the avatar or
without the avatar. During the learning session, their
eye movements were measured by using the eye
tracking system.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
466
4 RESULTS AND DISCUSSION
Eye movement pattern during the virtual coffee
making task with/without the avatar was measured.
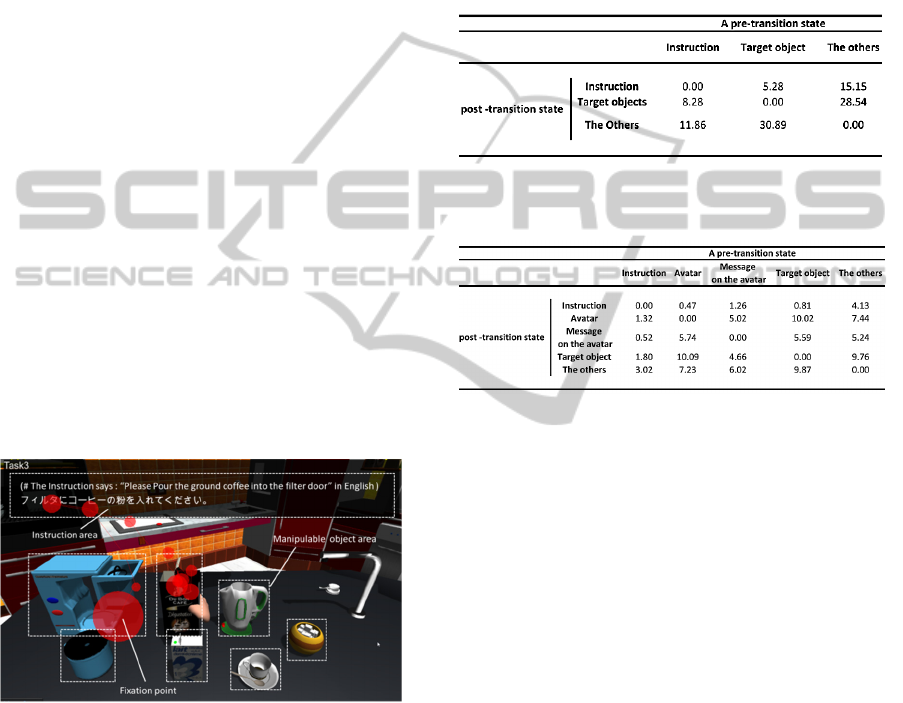
Figure 6 shows that the example of the observed eye
movements in the case of the task with the avatar.
The dashed line box represents an area that is set
to count how often a fixation point were appeared to
calculate a state transition rate of the fixation point.
These areas were focused on the manipulable objects,
instruction area, the avatar, as well as avatar’s
message which is represented on the avatar.
The average state transition rate was calculated
using the obtained eye movement data during the
conducted experiment. However, the data of the
three subjects out of the 16 subjects were removed
from the analysis since there was missing value on
their raw data.
Table 1 shows that the average state transition
rate of the fixation point in the coffee making task
(in without avatar condition). Where, the others state
in the table is a transition rate counted when the
subject’s fixation point is out of the focused area in
Figure 6.xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
The result shows that the most frequent transition in
this case was 30.89 %, namely the transition from
the Target object state to the others state. In
opposite transition direction the result was also high:
28.54%.xxx
Figure 6: Example of the observed eye movements.
In fact, when the task begins, first of all, a subject
paid attention to the instruction on the screen. Then
if the subject correctly understands the applied task,
he/she may take a look at the target object. From the
results, however, the subjects mostly see the other
objects (11.86%) after the instruction disappeared
from the screen. Table 2 shows that the average state
transition rate of the fixation point in the coffee
making task with avatar. The result shows that the
most frequent transition in this case was 10.09 %,
namely the transition from the Avatar state to the
Target object state. The transition from the Target
object state to the Avatar state is also high: 10.02%.
After the instruction on the screen disappeared,
most of subjects paid attention to the others as same
as without avatar condition. However, the transition
rate of the Target objects state, and Avatar state are
also respectively high.
Table 1: Average state transition rate (%) of the fixation
point in the coffee making task without avatar.
Table 2: Average state transition rate (%) of the fixation
point in the coffee making task with avatar.
According to some subject’s comments, he/she felt
his/her mind-wandering during the experiment in
without avatar condition. The mind-wandering is a
state of decoupled attention. In this state, usually
task-unrelated thoughts also occur.
In contrast, with avatar condition, most of
subject reported that they felt friendly toward the
avatar, as well as the avatar encouraged a helping
behaviour.
5 CONCLUSIONS
We proposed a newly revised Virtual Kitchen
system to integrate a new approach of errorless
learning (EL) framework using collaborative
learning with a virtual agent. In this paper, we
described a concept of the proposed system, as well
as conducted an evaluation to explore the
effectiveness of the proposed EL framework. As the
result of the evaluation using eye movement pattern
analysis, we found that subject’s visual attention was
successfully induced by the avatar. In addition,
according to the subjective report, we found that the
possibility to prevent user’s mind-wandering using
the proposed framework.
VRbasedCollaborativeErrorlessLearningSystemusingHumanoidAvatarforPeoplewithAlzheimer'sDisease
467

ACKNOWLEDGEMENTS
This work was financially supported in part by a
Grant-in-Aid for Young Scientists (B) from Japan
Society for the Promotion of Science.
REFERENCES
Adam, S., Van der Linden, M., Juillerat, A.C., & Salmon,
E., 2000. The cognitive management of daily life
activities in patients with mild to moderate
Alzheimeer’s disease in a day care center: A case
report. Neuropsychological Rehabilitation, 10(5), 485-
509.
Allain, P., Richard, P., Naud, M., Besnard, J., Massenot,
L., Nolin, P., & Le Gall, D., 2011. The value of a
virtual kitchen to assess the activities of daily life in
Alzheimer’s disease. Journal of Cybertherapy and
Rehabilitation, 4(2), 278–279.
Avila, R., Bottino, C., Carvalho, I., Santos, C., Seral, C.,
& Miotto, E., 2004. Neuropsychological rehabilitation
of memory deficits and activities of daily living in
patients with Alzhheimer’s disease: A pilot study.
Brazilian Journal of Medical and Biological Research,
37(11), 1721-1729.
Bickerton, W. L., Humphreys, G. W., & Riddoch, J. M. ,
2006. The use of memorised verbal scripts in the
rehabilitation of action disorganisation syndrome.
Neuropsychological Rehabilitation, 16(2), 155–177.
Broeren, J., Claesson, L., Goude, D., Rydmark, M., &
Sunnerhagen, K. S., 2008. Virtual rehabilitation in an
activity centre for community-dwelling persons with
stroke: The possibilities of 3-dimensional computer
games. Cerebrovascular Disorders, 26(3), 289–296.
Chevignard, M., Taillefer, C., Picq, C., Poncet, F.,
Noulhiane, M., & Pradat-Diehl, P., 2008. Ecological
assessment of the dysexecutive syndrome using
execution of a cooking task. Neuropsychological
Rehabilitation, 18(4), 461-485.
Clare, L., Jones, RS., 2008. Errorless learning in the
rehabilitation of memory impairment: a critical review.
Neuropsychol Rev, 18(1), 1-23.
Connor, B. B., Wing, A. M., Humphreys, G. W.,
Bracewell, R. M., and Harvey, D. A., 2002. Errorless
learning using haptic guidance: Research in
cognitive rehabilitation following stroke. In
Proceedings of the. 4
th
International Conference on
Disability, Virtual Reality & Associated Technology,
Veszprém, Hungary, 77-84.
Crosbie, J. H., Lennon, S., Mc Goldrick, M. C., McNeill,
M. D. J., & McDonough, S. M. “Virtual reality in the
rehabilitation of the arm after hemiplegic stroke: a
randomized controlled pilot study,” Clinical
Rehabilitation, vol. 26, no. 9, pp. 798–806, 2012.
Dechamps, A., Luciano, F., Jungheim, J., Leone, E.,
Dood, E., Allioux, A., Robert, P. H., Gervais, X.,
Maubourguet, N., Olde Rikkert, M. G. M., & Kessels,
R. P. C., 2011. Effects of different learning methods
for instrumental activities of daily living in patients
with Alzhheimer’s dementia: A pilot study. American
Journal of Alzhheimer’s Disease and Other
Dementias, 26(4), 273-281.
Dunn, J., Clare, L., 2007. Learning face-name associations
in early-stage dementia: comparing the effects of
errorless learning and effortful processing.
Neuropsychol Rehabil. 17(6), 735-54.
Farina, E., Fioravanti, R., Chiavari, L., Imbornone, E.,
Alberoni, M., Pomati, S., Pinardi, G., Pignatti, R., &
Mariani, C., 2002. Comparing two programs of
cognitive training in Alzheimer’s disease: A pilot
study. Acta Neurologica Scandinavica, 105(5), 365-
371.
Fortin, S., Godbout, L., & Braun, C. M. J., 2003. A test of
Shallice’s and Grafman’s neuropsychological models
of executive functions with head trauma patients
performing activities of daily living. Cortex, 39(2),
273-291.
Giovannetti, T., Schwartz, M. F., & Buxbaum, L. J., 2007.
The coffee challenge: A new method for the study of
everyday action errors. Journal of Clinical and
Experimental Neuropsychology, 29(7), 690-705.
Hargrave, R., Reed, B., & Mungus, D., 2000. Depressive
symptoms and functional ability in dementia. Journal
of Geriatric Psychiatry and Neurology, 13, 72-77.
Klinger, E., Chemin, I., Lebreton, S., & Marie´, R. M.,
2006. Virtual action planning in Parkinson’s disease:
A control study. Cyberpsychology and Behavior, 9(3),
342–347.
Klinger, E., Marie, R. M., Lebreton, S., Weiss, P. L., Hof,
E., & Josman, N., 2008. The VAP-S: A virtual
supermarket for the assessment of metacognitive
functioning. VRIC ’08, p. 57. Laval, France.
Kober SE, Wood G, Hofer D, Kreuzig W, Kiefer M,
Neuper C., 2013. Virtual reality in neurologic
rehabilitation of spatial disorientation. Journal of
NeuroEngineering and Rehabilitation, 10 (17).
Le Gall, D., Bersnard, J., Louisy, T., Richard, P., & Allain,
P., 2008. Utilisation de la re´alite´ virtuelle en
neuropsychologie. Neuropsy News, 7(4), 152–155.
Noale, M., Maggi, S., Minicuci, N., Marzari, C., Destro,
C., Farchi, G., Scafato, E., Baldereschi, M., DiCarlo,
A., & Crepaldi, G., 2003. Dementia and disability:
Impact on mortality. Dementia & Geriatric Cognitive
Disorders, 16(1), 7-14.
Richard, P., Massenot, L., Besnard, J., Richard, E., Le
Gall, D., & Allain, P., 2010. A virtual kitchen to assess
the activities of daily life in Alzheimer’s disease.
Proceedings of the International Conference on
Computer Graphics Theory and Applications, 378–
383.
Sohlberg, M. M., Ehlhardt, L., & Kennedy, M., 2005.
Instructional techniques in cognitive rehabilitation: A
preliminary report. Seminars in Speech Language
Pathology, 26, 268 – 279.
Soliman, M., Guetl, C., 2011. Evaluation of intelligent
agent frameworks for human learning. 14th.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
468

International Conference on Interactive Collaborative
Learning (ICL), 191-194.
Werner, P., Rabinowitz, S., Klinger, E., Korczyn, A. D., &
Josman, N., 2009. Use of the virtual action planning
supermarket for the diagnosis of mild cognitive
impairment. Dementia and Geriatric Cognitive
Disorders, 27(4), 301–309.
Yamaguchi, T., Foloppe, D, A., Richard, P., Richard, E.,
Allain, P., 2012. A Dual-Modal Virtual Reality
Kitchen for (Re)Learning of Everyday Cooking
Activities in Alzheimer’s Disease. Presence, 21(1),
43-57.
Zhang, L., Abreu, B. C., Seale, G. S., Masel, B.,
Christiansen, C. H., & Ottenbacher, K. J., 2002. A
virtual reality environment for evaluation of a daily
living skill in brain injury rehabilitation: Reliability
and validity. Archives of Physical Medicine and
Rehabilitation, 84(8), 1118–1124.
VRbasedCollaborativeErrorlessLearningSystemusingHumanoidAvatarforPeoplewithAlzheimer'sDisease
469
