
The Influence of Gravity-adapted Target Resizing on Direct
Augmented Reality Pointing under Simulated Hypergravity
Daniela Markov-Vetter
1,3
, Vanja Zander
2
, Joachim Latsch
2
and Oliver Staadt
3
1
Institute Aerospace Medicine, German Aersospace Center, Cologne, Germany
2
Institute of Cardiology and Sports Medicine, German Sport University Cologne, Cologne, Germany
3
Institute of Computer Science, University of Rostock, Rostock, Germany
Keywords: Augmented Reality, Interaction, Direct Pointing, Usability.
Abstract: The performance of Augmented Reality direct object selection coded outside of the human egocentric body
frame of reference decreases under short-term altered gravity. Therefore adequate countermeasures are
required. This paper presents the results of a proof-of-concept (POC) study to investigate the impact of
simulated hypergravity on the size and distance of a given target. The POC study is divided in a case study
and a user study, whereby hypergravity was induced by a long-arm human centrifuge and additional arm
weighting. For gravity-dependent resizing and –positioning we used the Hooke’s law that resulted in two
techniques of target deformation (compression, elongation) and compared both methods with normal sized
targets. Besides common metrics to measure the performance, we additionally evaluated the physiological
strain by the heart rate variability and the speed-accuracy tradeoff of the resizing techniques according to
Fitts’ law. The study showed that the online adaption of the present gravity load to targets' size and distance
influences the performance of direct AR direct pointing. The results revealed that the pointing performance
benefits from elongation target deformation by increased target sizes and distances.
1 INTRODUCTION
Advanced concepts of user interfaces are shifting
away from conventional displays and input devices
and claim more integration into our physical world.
Augmented Reality (AR) (Azuma, 1997) keeps the
natural perception and offers a direct interface by
merging 3D-registered virtual information with the
real world in real time. Current research on human
factors of handling AR interfaces presumes the
application under normogravity (1g) condition on
Earth. The application of AR to intra-vehicular
space operations could support astronauts in their
procedural task performance at complex technical
facilities aboard the International Space Station
(ISS) (Agan et al., 1998; Scheid et al., 2010).
In early prototyping and evaluation of an AR-
supported assistance system for standardized space
operations (Markov-Vetter et al., 2013) we could
show the feasibility and acceptance of domain
experts. For ensuring successful user performance
the integration of environmental factors into the
design processes is required. The adaption of
human-computer interaction to weightlessness is a
challenge that strongly affects the level of usability.
Working under altered gravity not only results in an
increased workload of user performance, it also
denotes changes in human sensorimotor
coordination (Bock et al., 1998), especially in aimed
pointing movements (Fisk et al., 1993; Bock et al.,
1992). Previous studies under parabolic flight (PF)
conditions (Markov-Vetter et al., 2012) have shown
that head-mounted AR interfaces for symbolic input
tasks (e.g., AR soft keyboard) under short-term
hyper- and microgravity conditions requires haptic
feedback and should be coded inside of human’s
egocentric body frame of reference (e.g., attached to
limbs). Despite these results, the future main
application of an AR supported guidance system is
predominantly coded outside of the user’s body
frame. Therefore, we are investigating adequate
countermeasures to maintain user performance in
object selection tasks as under those conditions. In
general, the selection performance can be affected
for example by targets’ size and distance. Looser et
al. (2007) evaluated different AR selection
techniques (Direct Touch, Ray-Casting, Magic Lens)
for different predefined target sizes, target density
401
Markov-Vetter D., Zander V., Latsch J. and Staadt O..
The Influence of Gravity-adapted Target Resizing on Direct Augmented Reality Pointing under Simulated Hypergravity.
DOI: 10.5220/0005316604010411
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 401-411
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

and distance to the users. In contrast to that, we used
a contrary approach for the evaluation of gravity-
adapted targets’ size and position. We used only a
direct touch interface for object selection in a head-
mounted AR environment. We hypothesize that: (1)
increased gravity conditions decrease the pointing
performance towards normal sized targets, and (2)
gravity-adapted target resizing impacts the
performance and workload of direct AR pointing.
Before conducting expensive experiments under
simulated weightlessness conditions (e.g., parabolic
flight), we performed a proof-of-concept (POC)
study under simulated hypergravity (+Gz)
conditions. We predicted variations of the pointing
performance (e.g., response time, speed, etc.)
correlated to the resized and -positioned information
visualisation depends on the adapted gravity force.
In response to visual stimuli the participant should
point towards virtual targets under altered +Gz loads
while wearing an optical see-through head-mounted
display (OST HMD). Until now, there have been no
equivalent studies on gravity-based target resizing
and -positioning conducted under simulated
hypergravity. The POC study was divided into two
parts using different simulations of hypergravity.
Firstly, we performed a case study where +Gz load
was induced by a long-arm human centrifuge and
pointing towards an AR soft keyboard for the
experimentation task. Secondly, we performed an
experiment under normogravity and simulated +Gz
load by additional arm weighting (Guardiera et al.,
2008) as validated method. To evaluate the
performance during the weight study we considered
the international standard for pointing devices
(ISO/DIS 9241-9, 2000) using the Fitts’ multi-
directional tapping task (MacKenzie, 1992). There
have been only few studies applying Fitts’ law on
evaluation of AR interaction (Rohs et al., 2011), or
on head-mounted Mixed Reality pointing (Kohli et
al., 2012).
Measuring the performance of aimed pointing
includes metrics such as the frequency of correct and
incorrect pointing, the accuracy, the response time
and the pointing speed. Since the physiological
factor is essential in sensorimotor coordination, we
recorded and evaluated the physiological strain by
assessing the heart rate variability (HRV) (Tümler et
al., 2008; Oehme et al., 2002) in the weight study.
This is an immanent expression of sympathetic and
parasympathetic influences of the function of the
heart (Task Force, 1996).
In the next section, the gravity adapted sizing
technique that were used for both experiments is
presented. The following sections describe the case
study and weighting experiments. We finally discuss
the results and suggest future research.
2 THE FORCE-BASED SIZING
For improving the performance of aimed pointing
movements towards virtual targets under altered
gravity conditions, we use a force-based approach
for automated transformation of the targets. Force-
based approaches are typically used for automated
positioning of labels and annotations, e.g. in 3D
information visualization (Pick et al., 2010;
Hartmann et al., 2004). Depending on the present
gravity load we calculate a corresponding force
affecting target's size and position. Our approach for
target resizing and -positioning is derived from the
elastic behaviour of soft bodies, which are
proportional deformed to the applied gravity load
, similar to Hooke’s law (Eq. 1). Therefore, we
calculated the axial (Eq. 2) and transversal (Eq. 3)
strain of the target using empirical values for the
modulus of elasticity and Poisson’s ratio .
Thereby, we distinguished between two techniques
of target sizing – sizing by compression (SC, Eq. 4)
and sizing by elongation (SE, Eq. 5). Their output
was compared with the unmodified sizing technique
(SU) as baseline condition that does not affect the
targets. For first experimentation we limited the
evaluated parameters by automated target resizing
without the transversal strain , but applied the
axial strain proportionally to target’s height and
width. Figure 1 shows the resulted sizing techniques
that we have investigated. We also applied the
gravity-based changes to the complete interface, i.e.
to targets' position. That resulted in larger target
distance with the SE technique and in smaller
distances with the compressed SC technique. While
the SC sizing technique provides smaller targets and
benefits from smaller target distances, the SE
technique offers larger target size at larger distance.
Therewith, we evaluated the efficiency of
sensorimotor coordination during direct AR pointing
tasks. To our knowledge, gravity-adapted target
sizing was not reported until now.
with
and
(1)
∗
∗
with
and
(2)
∗
(3)
,
(4)
,
(5)
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
402

For designing the normal sized targets (SU) we
followed the recommended ergonomic size range for
push buttons (Department of Defense. 1999) and
used a squared target of 15mm width and height for
the unmodified method.
Figure 1: Methods of target sizing being evaluated.
3 CASE STUDY BY LONG-ARM
HUMAN CENTRIFUGE (LAHC)
To proof our concept of the gravity-adapted
approach initially, we were allowed to perform a
case study under +Gz load induced by a long-arm
human centrifuge (LAHC, see Fig. 2). Human
centrifuges enable research in medicine and human
physiology during altered +Gz load and are also
used to train pilots and astronauts. The case study
was performed with one participant. The male
participant (51 years old, space engineer) is very
experienced under altered +Gz load (human
centrifuge, parabolic flight) and familiarized with
the used AR pointing system and task.
3.1 Apparatus
We used a right-sided monocular optical see-through
head mounted display (OST HMD, Shimadzu
dataGlass2/a), which has a semi-transparent LCD
display with a resolution of 800x600 pixels and a
diagonal field of view (FOV) of 30 degrees (see Fig.
3, left). The HMD was connected to the data
processing unit (Lenovo ThinkPad T420s, 2.8 GHz
CPU, NVIDIA Quadro NVS 4200M), which was
installed under the participant’s seat in the centrifuge
cabin. For optical inside-out marker tracking we
equipped the HMD with an optical sensor (Microsoft
HD 5000 webcam with 66 degree diagonal FOV).
To compute the position of participant’s eye relative
to the optical sensor, the participant had to perform a
self-calibration (Kato et al., 1999). To realize
pointing with haptic feedback we used a panel that
was installed in front of the participant and was
equipped with a multi-marker configuration. For the
pointing purpose a single marker was attached to the
participant’s fingertip at the dominant hand. The
pose data were captured with a mean frame rate of
38.74 fps (SD = 10.05) by the optical sensor at
constant artificial light conditions.
Figure 2: Used LAHC (5 m radius) with centrifugal
acceleration a
n
. The cabin is swinging out during the
rotation with resulted acceleration a in line with subject’s
long body axis.
3.2 Experiment Task
Pointing in response to visual stimuli was done
based on the PF experiment task (Markov-Vetter et
al., 2012) by using a soft AR keyboard with squared
keys of 15mm width and height (Department of
Defense. 1999). The participant was requested to
enter prescribed random pseudo-letters on the virtual
keyboard (see Fig. 3, right). Entering letters onto the
keyboard is determined by collision tests of a virtual
ray ranging from the origin of the fingertip marker to
the top of the index finger. The requested letter was
signalled in green, hitting a correct key was
highlighted in red and then the next key was
signalled. Because the data processing unit was
installed in the cabin of the centrifuge, the
participant needed to start the experiment with a
virtual start button displayed above the keyboard and
hidden afterwards.
Figure 3: Participant sitting in the LAHC cabin, wearing
the OST-HMD and pointing toward the panel (left). The
soft-AR keyboard (right).
3.3 Experiment Procedure
We conducted the experiment during three days. To
perform the tasks, four randomized target pools were
used per sizing technique. We defined a target pool
as a pre-randomized series of keys. Pointing towards
the keys of one target pool should be completed in
25 seconds. Within one centrifugation the participant
performed the task for two sizing techniques (SC,
SE) that resulted in a total pointing time of 200
TheInfluenceofGravity-adaptedTargetResizingonDirectAugmentedRealityPointingunderSimulatedHypergravity
403

seconds for each +Gz load. On the first day we
tested only the feasibility and functionality. Because
it was exhausting for the participant to perform arm
movements for 200 s at one time, we reduced the
operation time of a target pool to 20 s (in total 160 s
per centrifugation) from the second day on. We
distinguished between a fixed operation timer with
20 s runtime and a variable participant timer that
was automatically started after entering the first key.
If the operation timer elapsed, the timer for the
participant was automatically stopped. To avoid
transition effects between pool or method changes
the first and the last signaled key where not
recorded. Within one centrifugation the participant
performed the task under one +Gz load using the
unchanged method (SU) and one of the methods
with force-based target sizing (SC, SE) in an
alternated way. Thereby the sizing technique was
changed after one target pool. We compared the
methods SU with SC (second day) and SU and SE
(third day) under 1.5g, 1.8g and 2.5g in a random
presentation order. For reference purposes we also
measured the pointing performance of the
participant, using the SU method under 1g on the
first day. For physiological regeneration and to
avoid learning effects there was a 10 minutes break
between the changes of the +Gz loads.
3.4 Results
Following we are showing the frequencies of correct
and false target hits, the pointing response time in
millisecond, the percentage error rate and the stroke
rate per second. Thereby a false target hit constitutes
that the participant entered a wrong key. The
response time mirrors the elapsed time between
target’s indication in green and hitting this target.
The stroke rate was calculated by the mean number
of correct targets hits of the four targets pools and
the mean completion time of the target pools. For
analyzing the performance we evaluated a total of
646 correct target hits with a mean of 12.92 (SD =
2.51) as the average number of hits over the target
pools that were collected under the gravity levels 1g,
1.5g, 1.8g and 2.5g. Entering the targets resulted in a
mean stroke rate of 0.675 s
-1
(SD = 0.085) and one
target was hit with an overall mean response time of
1309.00 ms (SD = 204.07). For false target hits we
evaluated a total of 43 (M = 0.86, SD = 1.25) with a
mean percentage error rate of 6.14% (SD = 8.38).
Figure 4 mirrors the distribution of the
frequencies of correct target hits of the three target
sizing techniques (ST) per gravity level. It shows
that pointing towards elongated targets (SE) results
in average most correct target hits under the gravity
levels 1.5g and 1.8g. In contrast, the compressed
sizing technique (SC) led to the lowest number of
correct target hits. Table 1 shows that pointing
towards elongated SE targets also results in the
fastest response time under the +Gz load 1.5g, as
well as in the lowest percentage error rate and the
highest stroke rate under the +Gz loads 1.5g and
1.8g. The pointing performance under 2.5g led to
lowest error rate and the highest stroke rate with the
normal sized technique (SU) and to the fastest
response time with the compressed sizing technique
(SC). Otherwise, the pointing performance with the
SC method was most deteriorated under the +Gz
loads 1.5g and 1.8g.
Figure 4: Distributional characteristics of frequencies of
correct target hits by sizing technique per gravity load.
Table 1: Performance metrics of the LAHC case study.
ST
Response time (ms) Error rate (%) Stroke rate (s
-1
)
mean ± SD mean ± SD mean ± SD
Gz = 1.5g
SU 1367.25 ± 217.33 10.95 ± 5.87 0.649 ± 0.086
SC 1483.18 ± 260.69 10.21 ± 9.05 0.601 ± 0.043
SE 1341.46 ± 81.74 0.00 ± 0.00 0.714 ± 0.048
Gz = 1.8g
SU 1300.01 ± 166.84 2.03 ± 3.79 0.702 ± 0.079
SC 1338.24 ± 181.74 7.28 ± 10.11 0.622 ± 0.027
SE 1312.80 ± 133.50 1.67 ± 3.33 0.710 ± 0.049
Gz = 2.5g
SU 1322.43 ± 256.35 4.49 ± 6.11 0.659 ± 0.053
SC 1239.52 ± 168.98 19.41 ± 3.49 0.585 ± 0.009
SE 1389.13 ± 166.74 14.02 ± 16.23 0.627 ± 0.054
For statistical analysis of the sizing methods over all
and on same Gz load we used proc mixed (SAS®
9.4) with lsmeans/adjust = simulate to keep the
experiment-wise error rate α = 0.05. The test
showed significant differences for correct and false
target hits between the sizing techniques. The
comparison of correct target hits revealed effects on
the sizing method that indicated that scores
compared with the compressed method SC (M =
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
404

11.09, SD = 0.70) were significant higher for the
normal sized method SU (M = 12.65, SD = 1.47, p =
0.0048) and the elongated method SE (M = 12.75,
SD = 1.14, p = 0.0068). The comparison of false
target hits also revealed an effect on the sizing
method that shows that the performance with the
compressed method SC (M = 1.73, SD = 1.35) were
significant decreased (p = 0.0119) compared with
the normal sized method SU (M = 0.57, SD = 0.73).
Overall, the case study showed that gravity-adapted
target resizing and positioning significantly impacts
aimed pointing performance under increased Gz
loads and shows an up-coming trend for the
elongated method SE.
4 USER STUDY BY ARM
WEIGHTINGS
To verify the observed effect of the case study using
the LAHC we performed a subsequent experiment
under normogravity condition. For simulation the
+Gz loads we used corresponding weightings
(Guardiera et al., 2008) that were balanced attached
to the participant’s dominant forearm (see Fig. 5).
The extended arm weights (see Table 2) were
calculated (Eq. 6) for each participant as follows:
∗
∗.%
(6)
with
for the simulated gravity force,
for
the body weight of the participant and 5.38% as
averaged percentage arm weights introduced by
Clauser et al. (1969).
Table 2: Weights of body, arm and the added weight.
Participant
(kg)
(kg)
(kg)
1.5g 2g 2.3g
S1 80.0 4.3 2.2 4.3 5.6
S2 78.0 4.2 2.1 4.2 5.5
S3 75.0 4.0 2.0 4.0 5.3
S4 80.0 4.3 2.2 4.3 5.6
S5 65.0 3.5 1.8 3.5 4.6
S6 69.0 3.7 1.9 3.7 4.8
S7 60.0 3.3 1.7 3.3 4.3
S8 78.0 4.2 2.1 4.2 5.5
4.1 Apparatus
We used the same HMD setup as for the LAHC
study (see section 3.1). Also all participants
performed an eye-sensor calibration (Kato et al.,
1999) immediately before the experiment. To
perform the task of pointing towards outside coded
targets, the participant stood in front of a wall with
Figure 5: Participant sitting in the LAHC cabin, wearing
the OST-HMD and pointing toward the panel (left). The
soft-AR keyboard (right).
50 cm distance. We horizontal aligned the multi-
pattern depending on participant’s body height. The
optical sensor captured the pose data with a mean
frame rate of 38.52 fps (SD = 12.54). In order to
assess the physiological and cognitive workload by
the HRV, the participant was wearing a wireless
eMotion HRV sensor from Mega Electronic (see
Fig. 5, right). The HRV sensor recorded the HRV
and 3-axis acceleration at a sampling frequency of
1000 Hz and an accuracy of 1 ms.
4.2 Experiment Task
To evaluate the speed-accuracy tradeoff related to
Fitts’ law we decided to use an appropriate task and
designed a multi-directional pointing task as
proposed by the ISO/DIS 9241-9 standard (2000).
Therefore eight squared targets with a default size of
15.0 have been used (see Fig. 6). The
targets were arranged in a circle with a default
diameter of 82.5. Like the LAHC task, the
participant should point towards the targets in
response to visual stimuli. For evaluation purposes
by Fitts' law we defined “true” target connections of
0°, 45°, 90° that implied same target distance and
involves horizontal and vertical arm movements.
The remaining target connections were used for
pointing transition only.
Figure 6: Multi-directional task of the weight study.
4.3 Participants
Participants were 6 male and 2 women aged 24 to 51
TheInfluenceofGravity-adaptedTargetResizingonDirectAugmentedRealityPointingunderSimulatedHypergravity
405

years ( 20-31 years: 4 participants, 40-51 years: 4
participants, M = 37.25, SD = 10.55). Seven
participants had experiences with AR interfaces in
terms of participation in previous studies and one
participant was novice. They came from
backgrounds in biology, physiology, aerospace and
medicine. All participants had a right-dominant arm
that was used for the pointing task.
4.4 Procedure and Study Design
The study consists of three independent variables
(SU, SC, SE) on three +Gz loads (1.5g, 2g, 2.3g),
with SU used as baseline condition. In a within-
subject design, each participant performed the test
series for all independent variables under all loads,
resulting in a factorial design of 3 x 3. The repetition
rate for each method amounted to five target pools
per Gz load. Thereby a target pool was specified as
predefined series of randomized target connection of
the multi-directional pointing tasks. Pointing
towards the targets of one target pool should be
completed by the participants in 25 seconds. Overall
each participant performed 50 test series. The multi-
directional task was performed under the following
order of Gz loads: 2.3g, 1.5g and 2g. We used
systematic variations of the presentation order of the
sizing methods per Gz load. Corresponding to the
LAHC study we applied a fixed operation timer with
25 seconds running time and a variable participant
timer that was automatically started after hitting the
first target. To avoid transition effects between pool
changes the first and the last signaled targets
performance were not recorded. Between changes of
the Gz load, the participant had a five minute break
for physiological regeneration and to avoid learning
effects. To be familiar with the pointing task and to
check the integrity of the tracking operation, the
participant undertook a short training session before
starting the first condition.
4.5 Results
The participants performed the pointing task under
all gravity levels using all sizing techniques. Each
participant performed the eye-sensor calibration
directly before starting the experiment. Table 3
presents the resulted target sizes a with its
surrounding radius
√
and targets’ distance d
to each other calculated by our force-based resizing
approach using the active Gz load. The distance
reflects the pointing range between two "true" target
connections. While pointing towards normal sized
target (SE) always results in same target sizes and
distances at all Gz loads, the elongated sizing
technique (SE) results in increased sizes and
distances on increased Gz loads and contrary for the
compressed technique (SC). The pointing
performance was measured by the number of correct
and incorrect pointing, the Euclidean distance
between the target's center and the final intersection
point, as well as the response time and speed of
hitting a target. We also present the resulted
percentage pointing error rate, the stroke rate per
second and the percentage pointing accuracy. For
statistical analysis the performance of the sizing
techniques over all and on same Gz load, we used
proc mixed (SAS® 9.4) with lsmeans/adjust =
simulate to keep the experiment-wise error rate α =
0.05. For analyzing the pointing response time and
speed we only considered target hits with “true”
target connections that implicated the same pointing
distance per Gz load and sizing technique.
Additionally we evaluated the speed-accuracy
tradeoff of the sizing methods according to Fitts’
law and present the movement time (MT) and
throughput (TP). To evaluate the physiological strain
by HRV, we assessed the R-R distance, which is the
time interval in milliseconds between two
heartbeats. Therefore, the R-R interval shows the
impact to the cardiovascular system on a certain
workload. Larger workload caused a larger impact in
the cardiovascular system and causes therefore a
higher heart frequency and thus a shorter R-R
interval between the heartbeats.
Table 3: Resulted target size a, radius r
s
and distance d.
Gz
(mm)
(mm) (mm)
SU
- 15.00 10.61 082.50
SC
1.5 11.67 08.25 064.17
2.0 10.56 07.45 058.06
2.3 09.89 06.99 054.39
SE
1.5 18.33 12.96 100.83
2.0 19.44 13.75 106.94
2.3 20.11 14.22 110.61
4.5.1 Performance
Pointing Frequencies: The participants performed
the task with 5 repetitions under 10 paired
conditions with a total of 50 trials per participant. A
single task was timed to 25 seconds where the
participant tried to hit signalled targets. Overall, the
participants pointed towards 6708 targets (SU = 30.7
% , SC = 32.3 %, SE = 37.0 %) in a correct way and
towards 102 targets (SU = 33.7 %, SC = 34.7 %, SE
= 31.6 %) in a wrong way. Within 25 seconds (i.e.
one target pool) the average frequency of correct
target hits was 19.39 (SD = 3.37) and of false hits
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
406

0.27 (SD = 0.66). Table 4 splits this into the
interaction effect of the Gz loads on the studied
sizing techniques (SU, SC, SC) and additionally
shows the corresponding average frequency of
incorrect target hits, percentage error rate and hit
rate per second. Examining the three sizing
techniques per increased Gz load (1.5g, 2g, 2.3g)
data reveals that all means of the elongated sizing
technique (SE) are higher (correct hits, stroke rate)
or lower (incorrect hits, error rate) under 2g and 2.3g
than the SU and SC technique. Under 1.5g the
compressed method (SC) resulted in higher mean
values for correct hits and the stroke rate, and the
unchanged technique (SU) in lower means for
incorrect pointing. The distributional characteristics
for correct target hits are featured in Figure 7.
Table 4: Performance metrics of the arm weightings study:
number correct and false hits, error and stroke rate.
ST Correct hits False hits
Error (%) Stroke (s
-1
)
mean ± SD mean ± SD mean ± SD mean ± SD
Gz = 1.5g
SU 20.70 ± 2.63 0.09 ± 0.43 0.53 ± 2.44 0.88 ± 0.11
SC 21.20 ± 2.76 0.13 ± 0.34 0.70 ± 1.92 0.91 ± 0.08
SE 21.07 ± 2.30 0.13 ± 0.34 0.66 ± 1.71 0.89 ± 0.09
Gz = 2.0g
SU 17.56 ± 4.22 0.40 ± 0.82 2.69 ± 5.51 0.75 ± 0.16
SC 18.31 ± 4.37 0.26 ± 0.66 1.85 ± 5.41 0.78 ± 0.18
SE 19.85 ± 2.48 0.18 ± 0.45 1.04 ± 2.58 0.85 ± 0.09
Gz = 2.3g
SU 18.45 ± 3.57 0.46 ± 0.88 2.40 ± 4.67 0.79 ± 0.10
SC 16.88 ± 3.84 0.48 ± 0.85 2.89 ± 5.16 0.73 ± 0.16
SE 18.95 ± 2.36 0.43 ± 0.87 2.23 ± 4.69 0.80 ± 0.10
Figure 7: Distributional characteristics of correct target
hits by sizing technique per gravity load.
In terms of differences between the correct hits of
the sizing techniques over all Gz loads showed an
significant improvement (see Table 5) of the
performance using the elongated sizing technique
SE (M = 20.00, SD = 2.53) compared to the normal
sizing technique SU (M = 19.05, SD = 3.52, p =
0.0373) and to the compressed sizing technique SC
(M = 18.82, SD = 4.09, p = 0.0141 ).
Table 5: Significant differences of correct pointing using
SAS proc mixed with lsmeans/adjust=simulate.
Effect ST Gz ST Gz Estima. StdErr DF Adj P
ST SE - SU - 1.052 0.426 338 0.0373
ST SE - SC - -1.158 0.413 338 0.0141
Accuracy: The pointing accuracy reflects the
precision of target pointing and was measured by the
Euclidean distance
and the surrounding radius
of the targets (see Table 3). The distance
is the
distance between the centre of the target and the
intersection point within the target. Table 6 presents
amongst others the means and standard deviations
(SD) of the distance
and the percentage accuracy
of the sizing techniques per Gz load.
Table 6: Euclidean distance, accuracy, response time and
speed of the sizing techniques (ST) per Gz load.
ST
(mm)
Accuracy
(%)
Response time
(ms)
Speed
(mm/ms)
mean ± SD mean ± SD mean ± SD mean ± SD
Gz = 1.5g
SU 4.23 ± 2.49 60.10 ± 23.46 1007.35 ± 173.11 0.085 ± 0.017
SC 3.58 ± 1.96 56.59 ± 23.71 1016.00 ± 173.11 0.065 ± 0.012
SE 5.38 ± 2.99 58.51 ± 23.13 1029.43 ± 164.93 0.101 ± 0.018
Gz = 2.0g
SU 4.78 ± 2.74 54.93 ± 25.79 1012.15 ± 195.92 0.085 ± 0.019
SC 3.80 ± 1.87 49.13 ± 24.99 1039.77 ± 202.71 0.058 ± 0.012
SE 5.85 ± 3.34 57.47 ± 24.30 1031.43 ± 152.39 0.106 ± 0.017
Gz = 2.3g
SU 5.02 ± 2.50 52.72 ± 23.58 1073.56 ± 184.71 0.079 ± 0.015
SC 3.36 ± 1.71 51.94 ± 24.45 1068.76 ± 210.42 0.053 ± 0.012
SE 5.65 ± 3.14 60.24 ± 22.09 1078.08 ± 159.12 0.105 ± 0.016
The graphical distribution of the Euclidean distances
are presented in Figure 8 and shows a proportional
ratio between the distance and target's size, i.e. the
pointing distance is greater with the increment of
target's size and vice versa. The statistical analyzing
of the Euclidean distance confirmed this observation
by significant differences between the sizing
techniques. The test revealed that pointing towards
SC targets (M = 3.56 mm, SD = 1.96) resulted in
significant shorter distances analyzed over all Gz
loads (p < .0001) compared to SU (M = 4.56 mm,
SD = 2.56) and SE (M = 5.61 mm, SD = 3.15). But
it also showed differences (p < .0001) for grouped
effects (ST*Gz) by comparing the sizing techniques
on same Gz stage.
In contrast, the accuracy (see Fig. 9) mirrors the
percentage ratio of the distance
to the target size
expressed by the radius
. The participants pointed
with an overall mean percentage accuracy of 56.39
%. Per sizing technique over all Gz loads data
TheInfluenceofGravity-adaptedTargetResizingonDirectAugmentedRealityPointingunderSimulatedHypergravity
407
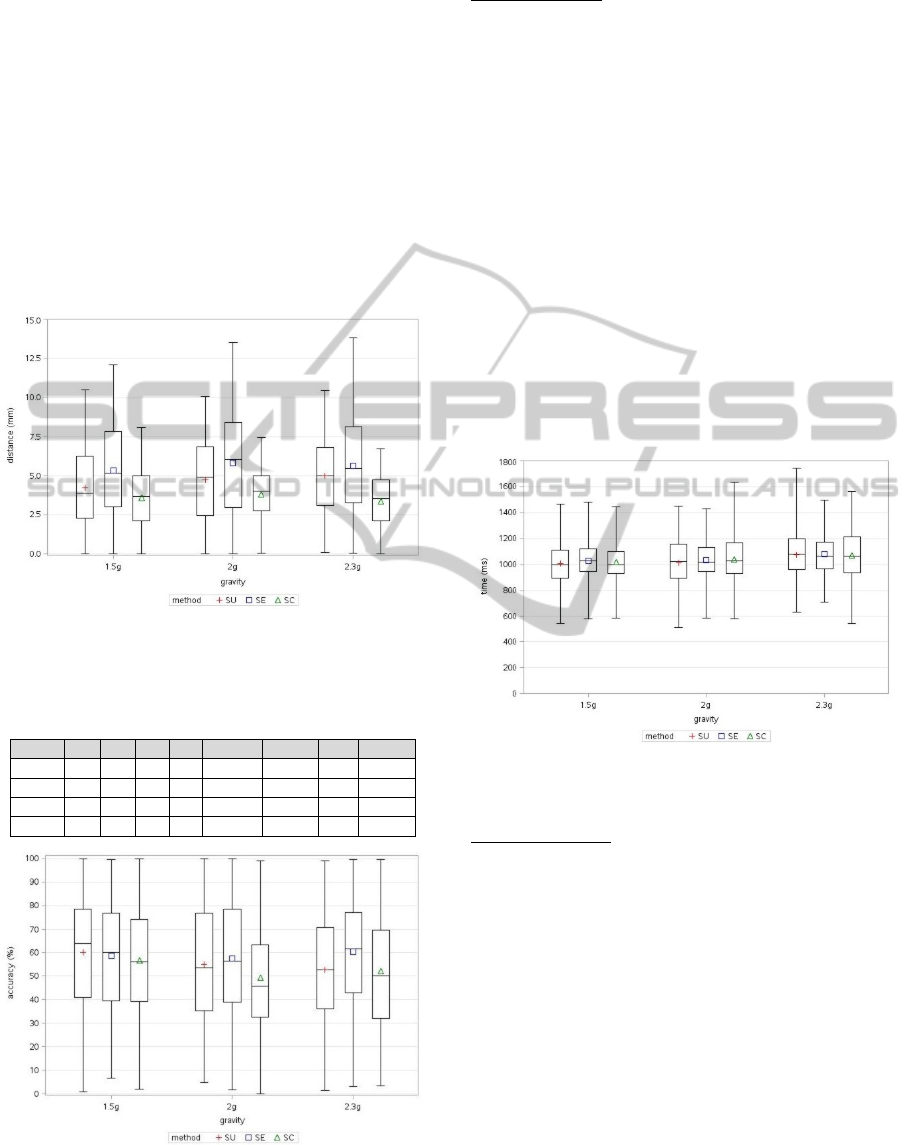
revealed that relative to target's size, participants
more precise pointed using the elongated method
(SE) with 58.72 % accuracy (SU: 56.77 %, SC:
53.19 %). Statistical analyzing (see Table 7)
revealed that pointing towards elongated targets
(SE) enabled a significant improvement (p < .0001)
compared to pointing towards compressed targets
(SC) over all Gz loads and separated by comparison
on same Gz stage, revealed in significant differences
under 2g (p < 0.0178) and 2.3g (p < 0.0072). The
comparison between pointing towards elongated
(SE) and normal sized targets (SU) resulted in
significant improvement under 2.3g (p < 0.0436)
using the SE sizing technique.
Figure 8: Distributional characteristics of Euclidean
distance by sizing technique per gravity load.
Table 7: Significant differences of accuracy using SAS
proc mixed with lsmeans/adjust=simulate.
Effect ST Gz ST Gz Estima. StdErr DF Adj P
ST SE - SC - -6.185 1.292 1951 < .0001
ST*Gz SE 2.0 SC 2.0 -8.341 2.434 1951 0.0178
ST*Gz SE 2.3 SC 2.3 -8.303 2.255 1951 0.0072
ST*Gz SE 2.3 SU 2.3 7.518 2.392 1951 0.0436
Figure 9: Distributional characteristics of accuracy by
sizing technique per gravity load.
Response Time: The response time (in millisecond)
is the time between highlighting a target and
selecting this target by the index finger. The means
and standard deviations (SD) are showed in Table 6.
Overall the participants pointed with a mean
response time of 1038.60 ms (SD = 179.26). Only
considering the sizing techniques at summarized Gz
loads data revealed shorter response times for
pointing towards normal sized target (SU) with a
mean of 1028.62 ms (SD = 183.49) compared to
compressed targets using the SC method (M =
1039.99 ms, SD = 195.32) and elongated targets
using the SE method (M = 1044.75 ms, SD =
160.75). The distribution of the response time for the
sizing techniques per Gz load is presented in Figure
10. Longest response times, but not significant, were
achieved using the elongated method (SE) under
1.5g and 2.3g. This is contrary to our expectation of
significant longer response times at larger target
distances (SE) under all Gz loads
Figure 10: Distributional characteristics of response time
by sizing method per gravity load.
Pointing Speed: The speed (in mm/ms) was
calculated by the distance between the targets (see
Table 3) divided by the response time. The means
and standard deviations (SD) are also presented in
Table 6. Because targets' size and distance varies
with the used sizing technique and the Gz load,
analyzing the speed is more meaningful than the
response time. Overall the participants pointed with
a mean speed of 0.083 mm/ms (SD = 0.024). The
distribution of pointing speed by the sizing
technique per gravity load is presented in Figure 11.
In contrast to the resulted response times, with
significant higher speed was pointed towards
elongated targets (SE) that were placed with greater
distances to each other. In Table 8 we are presenting
significant differences that shows a significant
improvement with p < .0001 for the SE method (M
= 0.104, SD = 0.017) analyzed over all Gz loads at
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
408
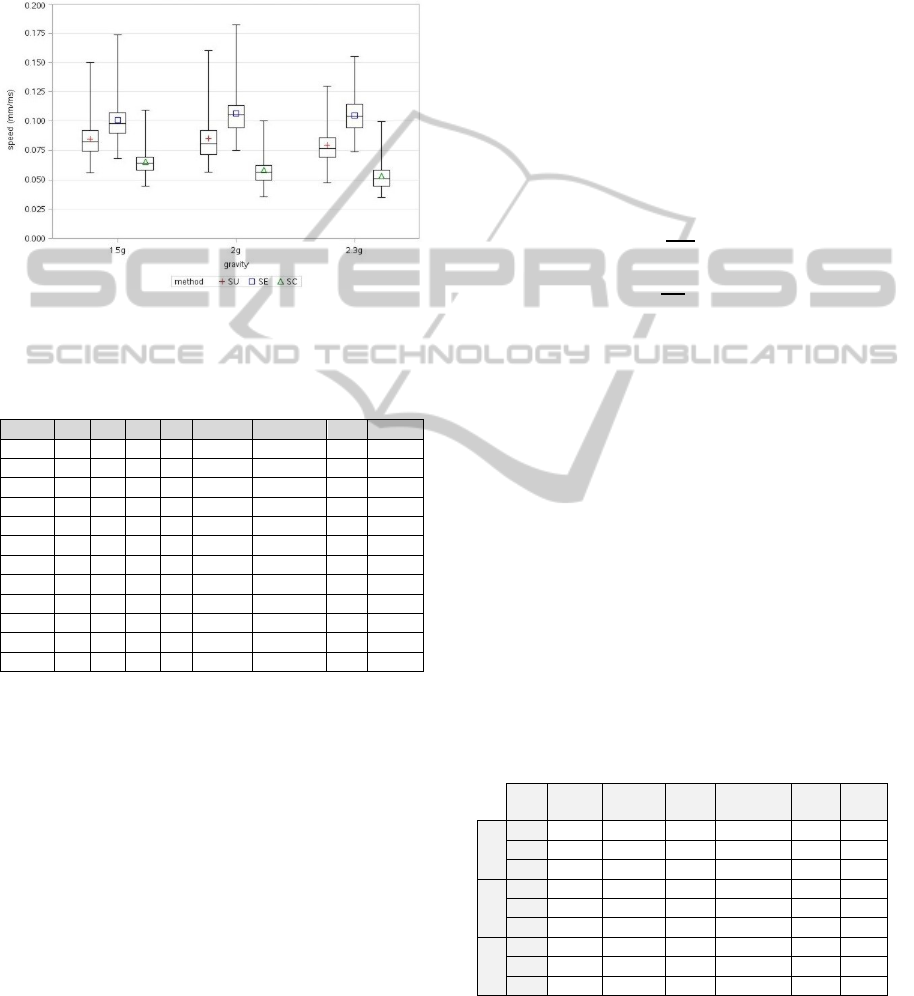
comparing with the other two sizing methods (SU:
M = 0.083, SD = 0.017, SC: M = 0.059, SD =
0.013), and shows significant faster pointing using
the SE methods (p < .0001) for grouped effects
(ST*Gz) by comparing the sizing techniques on
same stage of the Gz load.
Figure 11: Distributional characteristics of pointing speed
by sizing technique per gravity load. (*p < .05).
Table 8: Significant differences of pointing speed using
SAS proc mixed with lsmeans/adjust=simulate.
Effect ST Gz ST Gz Estima. StdErr DF Adj P
ST SE - SC - -0.0451 0.00081 2046 < .0001
ST SE - SU - 0.0209 0.00088 2046 < .0001
ST SC - SU - -0.0242 0.00091 2046 < .0001
ST*Gz SE 1.5 SC 1.5 -0.0355 0.00128 2046 < .0001
ST*Gz SE 2.0 SC 2.0 -0.0480 0.00150 2046 < .0001
ST*Gz SE 2.3 SC 2.3 -0.0518 0.00143 2046 < .0001
ST*Gz SE 1.5 SU 1.5 0.0161 0.00126 2046 < .0001
ST*Gz SE 2.0 SU 2.0 0.0211 0.00175 2046 < .0001
ST*Gz SE 2.3 SU 2.3 0.0256 0.00152 2046 < .0001
ST*Gz SC 1.5 SU 1.5 -0.0195 0.00131 2046 < .0001
ST*Gz SC 2.0 SU 2.0 -0.0269 0.00183 2046 < .0001
ST*Gz SC 2.3 SU 2.3 -0.0262 0.00155 2046 < .0001
4.5.2 Fitts' Law
In designing Human-Computer-Interfaces the
assessment of ergonomics is mainly determined by
Fitts' model of movement time (Eq. 7) (Fitts, 1954)
that a human needs to point at a target of a given
size and distance. Fitts' law predicts longer
movement times at larger distances, as well as at
smaller targets. Our sizing approach interrelates this
characteristics to each other, whereby the elongated
method (SE) provides larger targets at larger
distances, while the compressed method (SC) results
in smaller targets at smaller distances. We used
Fitts’ law to evaluate the speed-accuracy trade-off of
the studied sizing techniques related to direct
pointing affected by added arm weightings. The
metric for comparing the performance is the
Throughput TP (Eq. 8), in bits per second (bps)
calculated by the Index of Difficulty ID and mean
movement time MT (Eq. 8) as time to hit a target in
millisecond with a for the intercept and b for the
slope of measured mean response time by the target
width W. The ID measures the tasks difficulty in bits
using target size and distance. Because we used
squared targets, we calculated the ID only by the
targets' width. For computing the ID (Eq. 9) we used
the Welford formulation (Welford, 1960). To reflect
the observed pointing performance of the
participants, we used the effective target width W
e
(Eq. 10) (MacKenzie, 1992; Welford, 1960) as the
central 96 % of the spatial distribution with SD
x
as
standard deviation of the mean pointing accuracy.
(7)
(8)
log
0.5
(9)
4.133 ∗
(10)
Table 9 shows the resulting Fitts’ parameter for the
three sizing methods per +Gz load. The SE method
resulted overall in the highest ID
e
and therefore in
most difficult targets, but also in the highest
throughput (TP). The compressed sizing method
(SC) yielded the highest index of difficulty under
1.5g, but under 2g and 2.3g yielded most simple
targets. Pointing towards normal sized targets (SU)
yielded increased ID
e
, as well as a growing
throughput with the increment of gravity. Two-Way
analysis of variance did not show significant effects
between the methods' throughputs (F
2,4
= 1.52, p >
.05).
Table 9: Fitts’ resulted parameters: targets' distance (A),
target width (W), effective target width (W
e
), mean
measured movement time (MT), effective Index of
Difficulty (ID
e
), and Throughput (TP).
+Gz
A
(mm)
W
(mm)
W
e
(mm)
MT
(ms)
ID
e
(bits)
TP
(bps)
SU
1.5 82.50 15.00 14.47 1010.61
2.63 2.61
2.0 82.50 15.00 11.04 1052.83
2.99 2.85
2.3 82.50 15.00 11.78 1071.96
2.91 2.71
SC
1.5 64.17 11.67 8.47 1021.53
3.02 2.96
2.0 58.06 10.56 11.12 1032.42
2.52 2.44
2.3 54.39 09.89 9.09 1085.23
2.69 2.49
SE
1.5 100.83 18.33 13.68 1029.36
2.98 2.89
2.0 106.94 19.44 13.39 1035.30
3.09 2.98
2.3 110.61 20.11 13.18 1089.69
3.15 2.89
The resulting Pearson's correlation coefficient r and
the regression equations of Fitts’ movements model
for the sizing conditions are presented in Table 10.
While the movement time and the index of difficulty
TheInfluenceofGravity-adaptedTargetResizingonDirectAugmentedRealityPointingunderSimulatedHypergravity
409

highly linear correlate (r > 8.0) for the SU and SE
conditions, a low correlation was yielded from the
SC condition. The Fitts' model of movement time of
the SU (Eq. 11) and SE (Eq. 13) sizing conditions
provides good descriptions of the observed pointing
behaviour. Contrary to this, the model of the
compressed sizing technique SC (Eq. 12) resulted in
a model with a high intercept at a negative slope,
i.e. that the Movement Time is decreased for an
increased Index of Difficulty and vice versa. The
high intercept implies a movement time of 1.163 s at
ID = 0 bits that is about twice the MT of the SU
condition and about 14-fold of SE's MT.
Table 10: Pearson's correlation coefficient r between MT
and ID
e
, and linear regression equation of Fitts’ model of
MT per sizing technique over increased Gz loads.
r
Fitts' model of movement time (ms)
SU
0.856 638142
(11)
SC
-0.321 116343
(12)
SE
0.842 81315
(13)
4.5.3 Physiological Workload
The cardiovascular parameters were assessed during
all phases of the experiment. The 1g SU output was
used as reference measurement and showed the
lowest impact on the cardiovascular system. Since
the physiological workload grows with the
increment of gravity respectively the weight and R-
R distance (see Table 11) decreases during the
experiment under 2g and even more under 2.3g. The
R-R distances are showing the lowest values for the
SU, SC and SE conditions under high Gz load since
the weight attached to the participants’ arm
constituted the major part of the workload. While
pointing towards elongated SE targets (largest target
distances) yielded the lowest values for the R-R
distances under all Gz loads, pointing towards
compressed SC targets (smallest target distances)
resulted in the highest values for the R-R distance
and therefore in the lowest workload. Two-Way
analysis of variance showed a significant effect
between the R-R distance produced by increased Gz
loads (F
2,4
= 27.69, p < .05), but did not show
effects by the sizing methods (F
2,4
= 4.21, p > .05).
Table 11: Assessed HRV parameters: R-R distance in [ms]
median and SD across all participants.
Gz SU SC SE
1.0 723,86 ± 156.88 - -
1.5 674,24 ± 114.76 680,45 ±120.29 665,09 ± 102.56
2.0
642,11 ± 119.43 649,57 ±117.03 625,28 ± 088.07
2.3
641,97 ± 105.77 648,31 ±119.25 645,24 ± 126.40
5 DISCUSSION
While the LAHC study has already shown a small
effect of gravity-based sizing, the weight study has
confirmed that
the performance and workload during AR
selection is influenced by the online adaptation of changed
gravity load to the size and position of the virtual
information. The weight study also confirmed and verified
the observed trend of an improved performance of
pointing towards targets influenced by the present gravity
load in an elongated fashion (greater size, larger distance).
The results showed an overall significant increment of the
pointing frequencies towards elongated targets,
accompanied by a likewise non-significant decrement of
the error rate under 2g and 2.3g. In contrast to elongated
targets, the compressed sizing technique yields the
smallest targets at short distances. This enables significant
closer hits to the targets' centre. Conversely, pointing
towards elongated targets ensures significant most precise
pointing relative to targets sizes. The most important
finding revealed that larger targets at greater distances
between the targets calculated by the active Gz load
significantly accelerates the pointing performance.
Conversely, the results showed that pointing towards
compressed targets (smaller size, shorter distance)
generates the opposite effect resulting in decreased
performance.
Also the analysis of the speed-accuracy
tradeoff related to Fitts’ law yielded in a higher, but not
significantly, throughput by larger target size and distance.
The HRV based parameters showed an effect caused by
changed gravity respectively for attached arm weights and
the alternation of the workload. Therefore, the assessment
of workload during the application of AR, by measuring
cardiovascular parameters such as the HRV, is a
promising method to improve the user performance in
normogravity and altered gravity.
6 CONCLUSION AND FUTURE
WORK
We conducted a proof-of-concept study to
investigate the influence of the online adaption of
the present gravity load to target size and distance on
direct AR pointing. Two experimentations were
performed by simulated hypergravity induced by
long-arm human centrifugation and by added arm
weightings under normogravity. In conclusion, our
results are showing that direct AR pointing under
changed gravity conditions is impacted by adapted
target size, as well as the distance between the
targets. Under increased Gz loads the pointing
performance benefits from increased sizes and
distances depending on the Gz load. This is a
promising direction for further HCI research. Our
next step will be the adaptation of the experiment to
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
410

the corresponding investigation under microgravity
conditions. In further research we will replace direct
fingertip pointing by gaze-based selection for more
adequate fitting the AR view management of our
future AR supported assistant system for space
operation procedures. Related to the HRV, for the
next step we will consider separating physical and
cognitive workload by assessing the muscular
activity and applying electromyogram (EMG) to the
participant’s weighted arm. By doing that we could
even more precisely assess the workload during
pointing and targeting.
REFERENCES
Agan, M., Voisinet, L. A., Devereaux, A.. 1998. NASA’s
Wireless Augmented Reality Prototype (WARP). In
Proc. of AIP’98, pp. 236-242, 1998.
Azuma, R.T. 1997. A survey of augmented reality. In
Presence, Teleopera-tors and Virtual Environments,
vol. 6, no. 4, pp. 355–385.
Bock, O., Howard, I. P., Money, K. E., Arnold, K. E.
1992. Accuracy of aimed arm movements in changed
gravity. In Aviation, Space, and Environmental
Medicine, vol. 63, pp. 994-998.
Bock, O. 1998. Problems of sensorimotor coordination in
weightlessness. In Brain Research Reviews, vol. 28,
pp. 155-160.
Clauser, C. E., McConville, J. T., Young, J. W. 1969.
Weight, volume, and center of mass of segments of the
human body. AMRL Technical Report 69-70. Wright-
Patterson Air Force Base.
Department of Defense. 1999. Design criteria standard,
human engineering. Technical Report MIL-STD-
1472F.
Fisk, J., Lackne, J. R., DiZio, P. 1993. Gravitoinertial
force level influences arm movement control. In
Journal of Neurophysiology, vol. 69, pp. 504-511.
Fitts, P.M. 1954. The Information Capacity of the Human
Motor System in Controlling the Amplitude of
Movement. In Journal of Experimental Psychology,
47 pp. 381-391.
Guardiera, S., Schneider, S., Noppe, A., Strüder, H. K.
2008. Motor performance and motor learning in
sustained +3Gz acceleration. In Aviation Space and
Environmental Medicine, vol. 79(9), pp. 852-9.
Hartmann, K., Ali, K., Strothotte, T. 2004. Floating
Labels. Applying Dynamic Potential Fields for Label
Layout. In Smart Graphics, vol. 3031, Springer, pp.
101–113.
ISO/DIS 9241-9. 2000. Ergonomic requirements for office
work with visual display terminals (VDTs) - Part 9:
Requirements for non-keyboard input devices.
International Standard, International Organization for
Standardization.
Kato, H., Billinghurst, M. 1999. Marker Tracking and
HMD calibration for a video-based augmented reality
conferencing system. In Proc. IWAR‘99, vol. 0, pp.
85-94.
Kohli, L., Whitton, M. C., Brooks, F. P. 2012. Redirected
touching: The effect of warping space on task
performance. In Proc of 3DUI’12, pp. 105-112.
Looser, J., Billinghurst, M., Grasset, R., Cockburn, A.
2007. An evaluation of virtual lenses for object
selection in augmented reality. In Proc of.
GRAPHITE’07, pp. 203-210.
MacKenzie, I. S. 1992. Fitts’ law as a research and design
tool in human-computer interaction. In Journal of
Human-Computer Interaction, vol. 7, pp. 91–139.
Markov-Vetter, D., Moll, E., Staadt O. 2012. Evaluation
of 3D Selection Tasks in Parabolic Flight Conditions:
Pointing Task in Augmented Reality User Interfaces.
In Proc. of VRCAI‘12, pp.287-293.
Markov-Vetter, D., Zander, V., Latsch, J. Staadt, O. 2013.
The Impact of Altered Gravitation on Performance and
Workload of Augmented Reality Hand-Eye-
Coordination: Inside vs. Outside of Human Body
Frame of Reference. In Proc. of JVRC’13, pp. 65-72.
Oehme, O., Schmidt, L., Luczak, H. 2002. Comparison
between the strain indicator hrv of a head based virtual
retinal display and lc-mounted displays for augmented
reality. In Proc. of WWDU ‘02, pp. 387-389.
Pick, S., Hentschel, B., Tedjo-Palczynski, I., Wolter, M.,
Kuhlen, T. 2010. Automated positioning of
annotations in immersive virtual environments. In
Proc. of JVRC’10, pp. 1-8.
Rohs, M., Oulasvirta, A., Suomalainen, T. 2011.
Interaction with magic lenses: real-world validation of
a Fitts' Law model. In Proc. of CHI’11, pp. 2725-
2728.
Scheid, F., Nitsch, A., König, H., Arguello, L., De Weerdt,
D., Arndt, D., Rakers, S. 2010. Operation of European
SDTO at Col-CC. SpaceOps 2010 Conference.
Task Force of the European Society of Cardiology and the
North American Society of Pacing and
Electrophysiology. Heart Rate Variability: standards
of measurement, physiological interpretation and
clinical use. 1996. Circulation 1996 (93) 1043-1065 /
Eur Heart J, 17(3):354-81.
Tümler, J., Mecke, R., Schenk, M., Huckauf, A., Doil, F.,
Paul, G., Pfister, E., Böckelmann, I., Roggentin, A.
2008. Mobile Augmented Reality in Industrial
Applications: Approaches for Solution of User-
Related Issues. In Proc. of ISMAR’08, pp. 87-90.
Welford, A. T. 1960. The measurement of sensory-motor
performance: Survey and reappraisal of twelve years'
progress. In Ergonomics, 3, 189-230.
TheInfluenceofGravity-adaptedTargetResizingonDirectAugmentedRealityPointingunderSimulatedHypergravity
411
