
Human Activity Recognition and Prediction
David Jardim
1,2
, Luís Miguel Nunes
2,3,4
and Miguel Sales Dias
1,2,4
1
Microsoft Language and Development Center, Lisbon, Portugal
2
Instituto Universitário de Lisboa (ISCTE-IUL), Lisbon, Portugal
3
IT - Instituto de Telecomunicações, Lisbon, Portugal
4
ISTAR-IUL, Lisbon, Portugal
1 RESEARCH PROBLEM
Human activity recognition (HAR) has become one
of the most active research topics in image
processing and pattern recognition (Aggarwal, J. K.
and Ryoo, M. S., 2011). Detecting specific activities
in a live feed or searching in video archives still
relies almost completely on human resources.
Detecting multiple activities in real-time video feeds
is currently performed by assigning multiple
analysts to simultaneously watch the same video
stream. Manual analysis of video is labor intensive,
fatiguing, and error prone. Solving the problem of
recognizing human activities from video can lead to
improvements in several applications fields like in
surveillance systems, human computer interfaces,
sports video analysis, digital shopping assistants,
video retrieval, gaming and health-care (Popa et al.,
n.d.; Niu, W. et al., n.d.; Intille, S. S., 1999; Keller,
C. G., 2011).
This area has grown dramatically in the past 10
years, and throughout our research we identified a
potentially underexplored sub-area: Action
Prediction. What if we could infer the future actions
of people from visual input? We propose to expand
the current vision-based activity analysis to a level
where it is possible to predict the future actions
executed by a subject.
We are interested in interactions which can
involve a single actor, two humans and/or simple
objects. For example try to predict if “a person will
cross the street” or “a person will try to steal a hand-
bag from another” or where will a tennis-player
target the next volley. Using a hierarchical approach
we intend to represent high-level human activities
that are composed of other simpler activities, which
are usually called sub-events which may themselves
be decomposable. We expect to develop a system
capable of predicting the next action in a sequence
initially using offline-learning to bootstrap the
system and then with self-improvement/task
specialization in mind, using online-learning.
2 OUTLINE OF OBJECTIVES
The summarized objectives are:
Detecting relevant human behavior in midst of
irrelevant additional motion;
Recognizing the detected actions among
several pre-learned actions;
Given the current recognized action, predicting
the next most likely action or behavior that will
occur in a near future.
This research intends to create a system that can,
in real-time, accurately and robustly predict complex
human activities before they occur. The system will
evolve and learn new actions over time. We will be
using the Kinect sensor to extract 3D skeleton data.
The system should be robust to changes in relative
distance between the body and the sensor, skeleton
orientation, and speed of an action. Some of the
existing approaches try to predict the current action
in a short term before it has been concluded as seen
in (Ryoo, M., 2011) while others try to predict in
more long term situations (Li, K. et al., 2012). We
foresee several useful applications such as predicting
an ongoing stealing activity as early as possible
based on live video observations, in sports trying to
predict to which side of the goal the player is going
to score the penalty or in tennis guessing to which
side of the court the player is going to shot the ball,
or in health, trying to detect signs of confused or
dangerous behavior in patients with diseases that
cause the degeneration of the central nervous
system.
3 STATE OF THE ART
We separated the state of the art in two sections: the
first is related to Human Activity Recognition, while
the second focuses on Human Activity Prediction.
24
Jardim D., Nunes L. and Dias M..
Human Activity Recognition and Prediction.
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

3.1 Human Activity Recognition
Human activity recognition is a classification
problem in which events performed by humans from
video data are automatically recognized. Some of
the earliest work on extracting useful information
through video analysis was performed by O’Rourke
and Badler (O'Rourke, J. and N. I. Badler, 1980) in
which images were fitted to an explicit constraint
model of human motion, with constraints on human
joint motion, and constraints based on the imaging
process. Also Rashid (Rashid, Rick. 1980) did some
work on understanding the motion of 2D points from
which he was able to infer 3D positions. Driven by
application demands, this field has seen a relevant
growth in the past decade. Applied in surveillance
systems, human computer interfaces, video retrieval,
gaming and quality-of-life devices for the elderly.
Initially the main focus was recognizing simple
human actions such as walking and running (Dariu
M. Gavrila, 1999). Now that that problem is well
explored, researchers are moving towards
recognition of complex realistic human activities
involving multiple persons and objects. In the
review written by (Aggarwal, J. K. and Ryoo, M. S.
2011) an approach-based taxonomy was chosen to
categorize the activity recognition methodologies
which are divided into two categories.
Single-layered approaches (Bobick, A.F. and
Wilson, A.D. 1997; Yamato, J. et al., 1992; Starner,
T. and Pentland, A., 1995) typically represent and
recognize human activities directly based on
sequences of images and are suited for the
recognition of gestures and actions with sequential
characteristics. Hierarchical approaches represent
high-level human activities that are composed of
other simpler activities (Aggarwal, J. K. and Ryoo,
M. S. 2011). Since we are interested in recognizing
action sequences we will focus on the hierarchical
approaches and interactions between humans and
objects. Hierarchical approaches can be seen as
statistical, syntactic and description-based (Damen,
D. Hogg, D., 2009; Gupta, A., 2009; Intille, S. S.
and Bobick, A. F., 1999; Pinhanez, C.S. and Bobick,
A.F., 1998; Yu, E. and Aggarwal, J.K., 2006).
3.1.1 Statistical Approaches
This approach uses multiple layers of statistical
state-based models (usually two) such as Hidden
Markov Models (HMMs) and dynamic Bayesian
networks (DBNs) to recognize activities with
sequential structures. At the lower-layer, atomic
actions are recognized from sequences of feature
vectors which are converted to a sequence of atomic
actions. Then, the upper-layer treats this sequence of
atomic actions as observations generated by the
upper-layer models. For each model, a probability of
the model generating a sequence of observations is
calculated to measure the likelihood between the
activity and the input image sequence.
One of the most fundamental forms of the
hierarchical statistical approach was presented by
(Oliver, N et al., 2002) using layered Hidden
Markov Models (HMM). In this approach, the
bottom layer HMMs recognize atomic actions of a
single person by matching the models with the
sequence of feature vectors extracted from videos.
The upper layer HMMs represent a high-level
activity as a sequence of atomic actions. The authors
of (Nguyen, 2005) have also constructed hierarchical
HMMs to recognize complex sequential activities.
These approaches are especially suited to
recognize sequential activities (Damen, D. and
Hogg, D., 2009; Yu, E. and Aggarwal, J.K., 2006).
With enough training data, statistical models are
able to reliably recognize activities even with noisy
inputs. The major limitation of statistical approaches
is their inability to recognize activities with complex
temporal structures, such as an activity composed of
concurrent sub-events (Ivanov, Y.A. and Bobick,
A.F., 2000).
3.1.2 Syntactic Approaches
Syntactic approaches model human activities as a
string of symbols, where each symbol corresponds
to an atomic-level action which has to be recognized
first. Human activities are represented as a set of
production rules generating a string of atomic
actions, and they are recognized by adopting parsing
techniques from the field of programming languages
such as context-free-grammars (CFGs) and
stochastic context-free grammars (SCFGs).
A hierarchical approach to the recognition of
high-level activities using SCFGs was proposed by
(Ivanov, Y.A. and Bobick, A.F., 2000) where they
divided the framework into two layers: the lower
layer used HMMs for the recognition of simple
actions, and the higher layer used stochastic parsing
techniques for the recognition of high-level
activities. The authors in (Moore, D., n.d.) extended
the work described by (Ivanov, Y.A. and Bobick,
A.F., 2000) using SCFGs for the recognition of
activities, focusing on multitasked activities. They
were able to recognize human activities happening
in a blackjack card game, such as “a dealer dealt a
card to a player” with a high accuracy level.
HumanActivityRecognitionandPrediction
25

This approach also struggles to recognize concurrent
activities. Syntactic approaches model a high-level
activity as a string of atomic-level activities that
compose them. The temporal ordering of these
atomic-level activities has to be strictly sequential.
Therefore, they tend to have difficulties when an
unknown observation interferes with the system.
3.1.3 Description-based Approaches
This recognition approach explicitly maintains
spatio-temporal structures of human activities. It
represents a high-level human activity in terms of
simpler activities as sub-events, describing their
temporal, spatial and logical relationships. The
recognition of the activity is performed by searching
the sub-events satisfying the relations specified in its
representation.
In description-based approaches, a time interval
is usually associated with an occurring sub-event to
specify necessary temporal relationships among sub-
events. Many researchers (Pinhanez, C.S. and
Bobick, A.F., 1998; Nevatia et al. 2003; Vu, V. et
al., 2004; Ryoo, M.S. and Aggarwal, J.K., 2006)
have adopted the temporal predicates specified by
(Allen, J. F. and Allen, J. F., 1983). These predicates
are: before, meets, overlaps, during, starts, finishes
and equals. Researchers (Pinhanez, C.S. and Bobick,
A.F., 1998) have created a system that recognizes
the top-level activity by checking which sub-events
have already occurred and which have not. They
were able to recognize cooking activities in a
kitchen environment such as “picking up a bowl”.
The atomic-level actions were manually labelled
from the video in the experiments, and recognition
was successful even when one of the atomic actions
was not provided.
A description-based approach to analyze plays in
American football was designed by (Intille, S. S. and
Bobick, A. F., 1999). Using simple temporal
predicates (before and around), they have shown that
complex human activities can be represented by
listing the temporal constraints in a format similar to
those of programming languages. This
representation was done using three levels of
hierarchy: atomic-level, individual-level and team-
level activities. More recently (Ryoo, M. S. and
Aggarwal, J. K., 2008) proposed a probabilistic
extension to their framework that is able to
compensate for the failures of its low-level
components. Description-based approaches are
fragile when their low-level components are noisy.
This limitation has been overtaken by (Ryoo, M. S.
and Aggarwal, J. K., 2008), where they have used
logistic regression to model the probability
distribution of an activity, and used it to detect the
activity even when some of its sub-events have been
misclassified.
Human activities with complex temporal
structures can be represented and recognized by
description-based approaches which can
successfully handle concurrent organized sub-
events.
The major drawback of description-based
approaches is their inability to compensate for the
failures of low-level components (e.g., gesture
detection failure). This issue has been addressed in
some recent work done by (Gupta, A. et al., 2009)
and (Ryoo, M. S. and Aggarwal, J. K., 2008) where
they introduce a probabilistic semantic-level
recognition to cope with imperfect lower-layers.
3.2 Human Activity Prediction
Human activity prediction (HAP) is a process of
inferring ongoing activities from videos (Ryoo, M.,
2011). It can be applied in surveillance systems
(Ziebart, B., 2009), safety systems (Keller, C. G. et
al., 2011), autonomous vehicles and shopping
assistances (Popa, M. et al., n.d.).
The problem of predicting unknown variables
had a major breakthrough in 1961 with the work
published in (Kalman, R. E. and Bucy, R. S., 1961)
commonly known as the Kálmán filter. This
algorithm works in a two-step process. In the
prediction step, the Kálmán filter produces estimates
of the current state variables, along with their
uncertainties. Once the outcome of the next
measurement (including random noise) is observed,
these estimates are updated using a weighted
average, with more weight being given to estimates
with higher certainty. It has been applied in
guidance, control of vehicles and time series
analysis. The Kálmán filter can also be applied in
HAP as we´ve seen in (Pentland, A. and Liu, A.,
1999; Ziebart, B. D. et al., 2009).
One of the earliest approaches that we’ve found
tried to model and predict human behavior when
driving an automobile was (Pentland, A. and Liu, A.,
1999). The goal is to recognize human driving
behaviors accurately and anticipate the human’s
behavior for several seconds into the future. They
consider the human as a device with a large number
of internal mental states, each with its own particular
control behavior and interstate transition
probabilities. The states of the model can be
hierarchically organized to describe both short-term
and longer-term behaviors; for instance, in the case
ICPRAM2015-DoctoralConsortium
26

of driving an automobile, the longer-term behaviors
might be passing, following, and turning, while
shorter-term behaviors would be maintaining lane
position and releasing the brake. The authors
introduced the concept of multiple dynamic models
(MDM) which defends that the most complex model
of human behavior is to have several alternative
models of the person’s dynamics. Then at each
instant they make observations of the person’s state,
decide which model applies, and give a response
based on that model. This multiple model approach
produces a generalized maximum likelihood
estimate of the current and future values of the state
variables. With this approach they have accurately
categorized human driving actions very soon after
the beginning of the action.
Another type of prediction was addressed by
(Ziebart, B., 2009) where a robot should predict the
future locations of people and plan routes that will
avoid disrupting the person’s natural behavior due to
the robot’s proximity, while still efficiently
achieving its objectives using a soft-max version of
goal-based planning. They represent the sequence of
actions that lead to a person’s future position using a
deterministic Markov decision process (MDP) over
a grid representing the environment. People do not
move in a perfectly predictable manner, so the robot
has to reason probabilistically about their future
locations. By maximizing the entropy of the
distribution of trajectories, which are subject to the
constraint of matching the reward of the person’s
behavior in expectation, they obtain a distribution
over trajectories. One interesting feature is the fact
that the feature-based cost function learned using
this approach allows accurate generalization to
changes in the environment. Although to
successfully predict the future trajectory of a person
through an environment the authors require a setting
where the human behavior is fully observable and
not very crowded.
Another work by Ryoo (Ryoo, M., 2011) tries to
construct an intelligent system which will perform
early recognition from live video streams in real-
time. They introduce two new human activity
prediction approaches which are able to cope with
videos from unfinished activities. Integral bag-of-
words is a probabilistic activity prediction approach
that constructs integral histograms to represent
human activities. Simply putting it, the idea is to
measure the similarity between a video and the
activity model by comparing their histogram
representations. The other approach is called
Dynamic bag-of-words which considers the
sequential nature of human activities, while
maintaining the bag-of-words advantages to handle
noisy observation. The motivation is to divide the
activity model and the observed sequence into
multiple segments to find the structural similarity
between them. That is, the bag-of-words paradigm
is applied in matching the interval segments, while
the segments themselves are sequentially organized
based on their recursive activity prediction
formulation. They’ve managed to correctly predict
ongoing activities even when the provided videos
contain less than the first half of the activity.
In (Kitani, K. M. et al., n.d.) the authors address
the task of inferring the future actions of people
while modeling the effect of the physical
environment on the choice of human actions with
prior knowledge of goals. They’ve focused on the
problem of trajectory-based human activity analysis
exploring the interplay between features of the
environment and pedestrian trajectories. To integrate
the aspects of prior knowledge into modeling human
activity, they’ve leveraged recent progress in
semantic scene labeling and inverse optimal control.
This kind of labeling provides a way to recognize
physical scene features such as pavement, grass,
tree, building and cars, playing a critical role in
advancing the representational power of human
activity models. Inverse optimal control is also
called Inverse Reinforcement Learning which
expands the horizon of vision-based human activity
analysis by integrating the impact of the
environment and goals on future actions. The
authors propose a Hidden variable Markov Decision
Process (HMDP) model which incorporates
uncertainty (e.g., probabilistic physical scene
features) and noisy observations (e.g., imperfect
tracker) into the activity model to express the
dynamics of the decision-making process. Since the
proposed method encapsulates activities in terms of
physical scene features and not physical location, it
is also able to generalize to novel scenes transferring
knowledge. They are able to forecast possible
destinations of the pedestrians through a path, but
this evaluation is limited to the physical features of
the environments.
More recently (Koppula, H. S., 2013) consider
the problem of detecting past activities as well as
anticipating which activity will happen in the future
and how. They start by modelling the rich spatio-
temporal relations between human poses and objects
using a conditional random field (CRF). The key
idea is to sample a few segmentations that are close
to the ground-truth segmentation using the CRF
model instantiated with a subset of features, and then
explore the space of segmentation by making merge
HumanActivityRecognitionandPrediction
27

and split moves to create new segmentations. Done
by approximating the graph with only additive
features, which lends to efficient dynamic
programming. With that they can reason about the
possible graph structures for both past and future
activities. From their experiments with over 120
activity videos (making cereal, taking medicine,
stacking objects, unstacking objects, microwaving
food, picking objects, cleaning objects, taking food),
they achieved an accuracy of 70.3% for sub-activity
labeling and 83.1% for high-level activities
respectively for detection. Furthermore, they
obtained an accuracy of 49.6% for anticipating sub-
activities in future time-frames.
In the research of (Koppula, H. and Saxena, A.,
2013) the goal is to enable robots to predict the
future activities as well as the details of how a
human is going to perform them in short-term (e.g.,
1-10 seconds). This is achieved by modelling three
aspects of the activities. First, they model the
activities through a hierarchical structure in time
where an activity is composed of a sequence of sub-
activities. Second, model their interdependencies
with objects and their affordances. Third, it is
necessary to anticipate the motion trajectory of the
objects and humans, which will tell how the activity
can be performed. For anticipation, they present an
anticipatory temporal conditional random field
(ATCRF), where they start modeling the past with a
standard CRF but augmented with the trajectories
and with nodes/edges representing the object
affordances, sub-activities, and trajectories in the
future.
They’ve used a dataset containing 120 RGB-D
videos of daily human activities, such as
microwaving food, taking medicine, etc. The results
show that anticipation improves the detection of past
activities: 85.0% with vs 82.3% without. Their
algorithm obtains an activity anticipation accuracy
(defined as whether one of the top three predictions
actually happened) of (75.4%, 69.2%, 58.1%) for
predicting (1.3, 10) seconds into the future.
The authors in (Hoai, M. and De la Torre, F.,
2013) propose Max-Margin Early Event Detectors
(MMED), a novel formulation for training event
detectors that recognize partial events, enabling
early detection. MMED is based on structured
output SVM but extends it to accommodate the
nature of sequential data. The key idea behind
MMED is that given a training time series that
contains a complete event, they simulate the
sequential arrival of training data and use partial
events as positive training examples. Experiments on
datasets of varying complexity, from synthetic data
and sign language to facial expression and human
actions, showed that their method often made faster
detections while maintaining comparable or even
better accuracy.
Prediction is also important in the field of
human-robot collaboration where (Hawkins, K. and
Vo, N., 2013) created a system whose goal is to
predict in a probabilistic manner when the human
will perform different subtasks that may require
robot assistance in a human-robot collaboration. The
robot must determine the state of the collaborative
task being performed and it must infer both what to
do and when to do it. The representation is a
graphical model where the start and end of each
subtask is explicitly represented as a probabilistic
variable conditioned upon prior intervals. This
formulation allows the inclusion of uncertain
perceptual detections as evidence to drive the
predictions. Next, given a cost function that
describes the penalty for different wait times, a
planning algorithm was developed which selects
robot-actions that minimize the expected cost based
upon the distribution over predicted human-action
timings.
Depending on the confidence of the model
several results were obtained. Though a high
confidence detector can occasionally produce little
or no wait time, it can also suffer from severe
failures. A low confidence detector, however, can
produce consistently reasonable results.
The work done by (Li, K. et al., 2012) might be
the most related to what we are trying to achieve
with our research. Authors propose a framework for
long-duration, complex activity, prediction by
discovering the causal relationships between
constituent actions and the predictable
characteristics of activities. This approach uses the
observed action units as context to predict the next
possible action unit, or predict the intension and
effect of the whole activity. The key contribution of
this work is the idea that causality of action units can
be encoded as a Probabilistic Suffix Tree (PST) with
variable temporal scale, while the predictability can
be characterized by a Predictive Accumulative
Function (PAF) learned from information entropy
changes along every stage of activity progress. The
efficiency of their method was tested on the complex
activity of playing a tennis game and predicting who
will win the game (65% of certainty with 60% of
observed game).
From what we´ve seen prediction of actions can
be much improved specially in a mid/long-term
prediction in complex activities. We hope that with
the use of Kinect 2 and our array of specialized
ICPRAM2015-DoctoralConsortium
28
classifiers each of them connected to purpose data
filter combined with contextual information such as
the scene we might be able to obtain better results.
4 METHODOLOGY
In our setting, our algorithm will be observing a
scene containing a human (or two interacting
humans) for a certain amount of time, and our goal
is to detect current activities and anticipate future
activities.
The processing sequence can be outlined as:
Obtain RGB-D data;
Extract and calculate useful features such as
joint position in 3D, angle of the joints and
speed;
Partition sequences into small actions (or
movements). These may be full body or part-
of-body actions. In some cases more than one
part-of-body action can be active
simultaneously.
Detect actions using an action recognition
module (includes filtering data, running it
through an array of parallel classification
models and merge classifications producing
one a set of matches with each of the known
actions); Eventually, this module may create
new classifiers for movements that do not
match any of the known actions.
Predict future actions based on the probabilities
of the previously observed action sequence.
Initially our tests will be performed with our own
recorded dataset (part of which was already
acquired) and later applied on other datasets to
verify the performance of our framework. In order to
partition the sequences in sub-activities we have to
be able to detect the occurring actions. One approach
would be to label the actions manually and then train
a classifier with labelled actions. However we will
aim at creating a mechanism that can successfully
label activities automatically by finding patterns of
movement. This could be possible by analyzing the
obtained metrics (3D position, angle and velocity of
the joints) and using a clustering algorithm, such as
K-means or clustered HMM’s. If we successfully
label the low level activities we will proceed to train
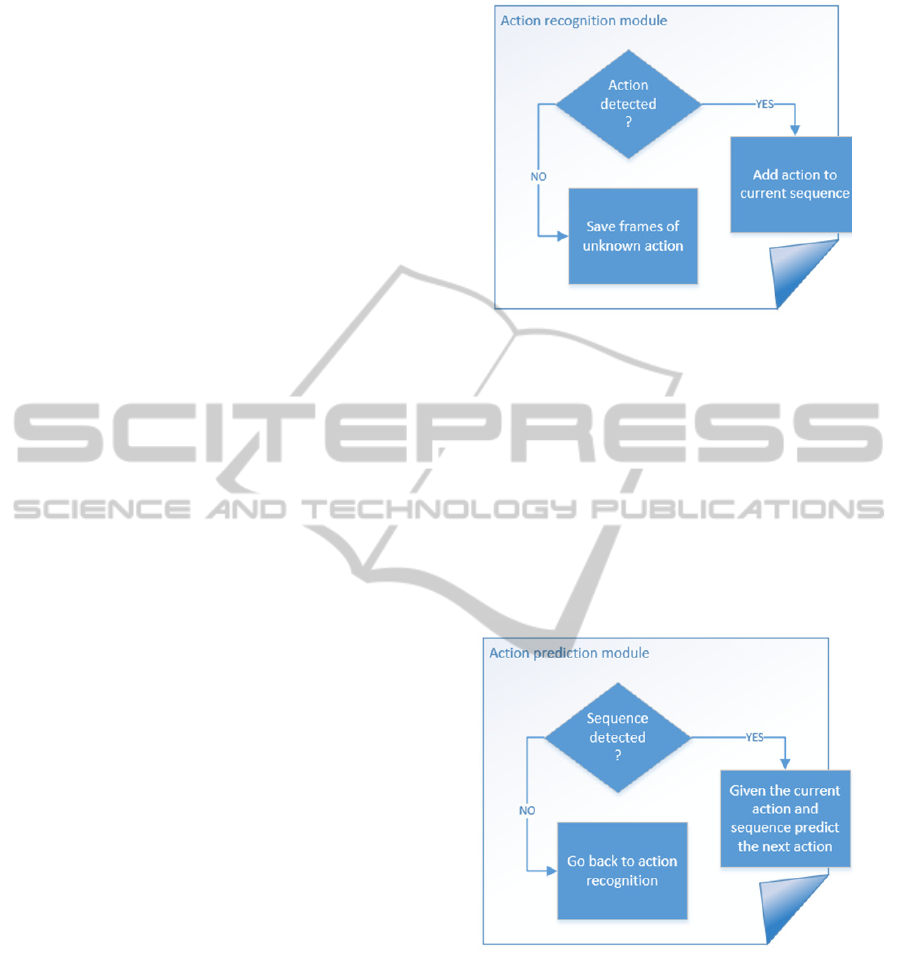
an array of classifiers as illustrated in Figure 1, each
of which recognizes a specific action. We will also
include the possibility to learn new actions. If the
system is presented with an unknown action it
should create a new class of actions, thus creating a
library of actions.
Figure 1: Action recognition module.
As for the action prediction module (Figure 2), given
the current detected action and the context of the
current sequence of actions it will predict with a
probability from 0 to 1 of confidence which action
will be performed next. This module is dependent of
the action recognition module, after having the
actions labeled and discovered our first approach
will be to use conditional random fields (CRFs) to
recognize patterns and perform a structured
prediction. This is often used to labeling or parsing
sequential data, which is the case of our data.
Figure 2: Action prediction module.
5 EXPECTED OUTCOME
This research intends to make the following
contributions for advancing the state of the art of
Human activity recognition and prediction:
Develop an approach to this problem that can
be implemented on top of currently available
commercial hardware and software.
HumanActivityRecognitionandPrediction
29

Compare different approaches of action-
division rules in 3D skeleton sequences.
Compare the importance of different features
extracted from the collected data, or calculated.
Implement a cluster analysis method which
will facilitate the task of recognizing actions by
grouping a set of points representing the
skeleton data when performing a specific
action;
Create an algorithm that, in an occurring
sequence of actions, successfully detects
patterns and predicts what will happen next.
This prediction could be short, mid or long-
term;
Develop a functional prototype that, by using
the previous methods, will be able to recognize
and predict actions in real-time. This will be
the main criteria for evaluation of the research
results;
Advance the state-of-the-art in the
development of automated visual systems
which have the task of recognizing and
describing human actions and improve the
performance of action prediction.
6 STAGE OF THE RESEARCH
The research is still at its early stages, the related
work has been extensively researched, and we have
already created a dataset recorded with Kinect that
consists of skeleton data from 12 people, each
performing 6 sequences containing 5 actions, with a
total of 8 different actions. In total 72 sequences and
360 actions. This will increase in the future as we
intend to use Kinect 2 as soon as it is released to the
public. Also a framework capable of capturing and
playing RGB-D videos has been developed. Our
next step is to automatically partition and classify
our sequences of action via a clustering algorithm.
ACKNOWLEDGMENTS
This work was partially funded by Marie Curie
Actions IRIS (ref. 610986, FP7-PEOPLE-2013-
IAPP), FCT: SFRH/BDE/52125/2013 and FCT:
PTDC/EEI-SII/2312/2012.
REFERENCES
Aggarwal, J. K., and Ryoo, M. S. (2011). Human activity
analysis. ACM Computing Surveys, 43(3), 1–43.
doi:10.1145/1922649.1922653.
Allen, J. F., and Allen, J. F. (1983). Maintaining
Knowledge about Temporal Intervals, 26(11), 832–
843.
Bobick, A.F. Wilson, A.D., A state-based approach to the
representation and recognition of gesture, Pattern
Analysis and Machine Intelligence, IEEE Transactions
on , vol.19, no.12, pp.1325-1337, Dec 1997 doi:
10.1109/34.643892.
C Wolf, J. Mille, L.E Lombardi, O. Celiktutan, M. Jiu, M.
Baccouche, E Dellandrea, C.-E. Bichot, C. Garcia, B.
Sankur, The LIRIS Human activities dataset and the
ICPR 2012 human activities recognition and
localization competition, Technical Report RR-LIRIS-
2012-004, LIRIS Laboratory, March 28th, 2012.
CMU Graphics Lab Motion Capture Database, Available:
http://mocap.cs.cmu.edu/. Last accessed 14th August
2012.
Damen, D. Hogg, D., Recognizing linked events:
Searching the space of feasible explanations,
Computer Vision and Pattern Recognition, 2009.
CVPR 2009. IEEE Conference on , vol., no., pp.927-
934, 20-25 June 2009 doi: 10.1109/CVPR.2009.
5206636.
Dariu M. Gavrila, The visual analysis of human
movement: a survey, Computer Vision and Image
Understanding (CVIU) 73 (1) (1999) 82–92.
Gupta, A., Srinivasan, P., Jianbo Shi; Davis, L.S.,
Understanding videos, constructing plots learning a
visually grounded storyline model from annotated
videos, Computer Vision and Pattern Recognition,
2009. CVPR 2009. IEEE Conference on , vol., no.,
pp.2012-2019, 20-25 June 2009 doi: 10.1109/CVPR.
2009.5206492.
Hawkins, K., and Vo, N. (2013). Probabilistic human
action prediction and wait-sensitive planning for
responsive human-robot collaboration. Proceedings of
the IEEE.
Hoai, M., and De la Torre, F. (2013). Max-Margin Early
Event Detectors. International Journal of Computer
Vision, 107(2), 191–202. doi:10.1007/s11263-013-
0683-3.
ICPR - HARL 2012 (Human activities recognition and
localization competition), Available: http://liris.cnrs.fr/
harl2012/. Last accessed 24th September 2012.
Intille, S. S., and Bobick, A. F. (1999). A Framework for
Recognizing Multi-Agent Action from Visual
Evidence, (489), 1–7.
Ivanov, Y.A. Bobick, A.F., Recognition of visual activities
and interactions by stochastic parsing, Pattern
Analysis and Machine Intelligence, IEEE Transactions
on, vol.22, no.8, pp.852-872, Aug 2000 doi: 10.1109/
34.868686.
Kalman, R. E., and Bucy, R. S. (1961). New Results in
Linear Filtering and Prediction Theory. Journal of
Basic Engineering, 83(1), 95. doi:10.1115/1.3658902.
Keller, C. G., Dang, T., Fritz, H., Joos, A., Rabe, C., and
Gavrila, D. M. (2011). Active Pedestrian Safety by
Automatic Braking and Evasive Steering. IEEE
ICPRAM2015-DoctoralConsortium
30

Transactions on Intelligent Transportation Systems,
12(4), 1292–1304. doi:10.1109/TITS.2011.2158424.
Kitani, K. M., Ziebart, B. D., Bagnell, J. A., and Hebert,
M. (n.d.). Activity Forecasting, 1–14.
Koppula, H. S. (2013). Learning Spatio-Temporal
Structure from RGB-D Videos for Human Activity
Detection and Anticipation, 28.
Koppula, H., and Saxena, A. (2013). Anticipating Human
Activities using Object Affordances for Reactive
Robotic Response. Robotics: Science and Systems.
Li, K., Hu, J., and Fu, Y. (2012). Modeling complex
temporal composition of actionlets for activity
prediction. Computer Vision–ECCV 2012, 286–299.
Liu, N., Lovell, B. C., Kootsookos, P. J., Davis, R. I. A.,
Imaging, I. R., and Group, S. I. (n.d.). Understanding
HMM Training for Video Gesture Recognition School
of Information Technology and Electrical Engineering,
(Figure 2), 2–5.
Lopes, P.F. Jardim, D. Alexandre, I.M. , Math4Kids,
Information Systems and Technologies (CISTI), 2011
6th Iberian Conference on , vol., no., pp.1-6, 15-18
June 2011.
Moore, D. (n.d.). Recognizing Multitasked Activities from
Video using Stochastic Context-Free Grammar Intro-
duction and Related Work Representation using SCFG
The Earley-Stolcke Parsing AAAI-02, 770–776.
Nevatia, Ram Zhao, Tao Hongeng, Somboon, Hierarchical
Language-based Representation of Events in Video
Streams, Computer Vision and Pattern Recognition
Workshop, 2003. CVPRW '03. Conference on , vol.4,
no., pp.39, 16-22 June 2003 doi:
10.1109/CVPRW.2003.10038.
Nguyen, N.T. Phung, D.Q. Venkatesh, S. Bui, H.,
Learning and detecting activities from movement
trajectories using the hierarchical hidden Markov
model," Computer Vision and Pattern Recognition,
2005. CVPR 2005. IEEE Computer Society
Conference on , vol.2, no., pp. 955- 960 vol. 2, 20-25
June 2005 doi: 10.1109/CVPR.2005.203.
Niu, W., Long, J., Han, D., Wang, Y., and Barbara, S.
(n.d.). Human Activity Detection and Recognition for
Video Surveillance, 1–4.
Oliver, N. Horvitz, E. Garg, A., Layered representations
for human activity recognition, Multimodal Interfaces,
2002. Proceedings. Fourth IEEE International
Conference on, vol., no., pp. 3- 8, 2002 doi: 10.1109/
ICMI.2002.1166960.
O'Rourke, J. and N. I. Badler. 1980. Model-based image
analysis of human motion using constraint
propagation. IEEE PAMI, 2(4).
Pentland, A. and Liu, A. (1999). Modeling and prediction
of human behavior. Neural computation, 11(1), 229–
42. Retrieved from http://www.ncbi.nlm.nih.gov/
pubmed/9950731.
Pinhanez, C.S., Bobick, A.F., Human action detection
using PNF propagation of temporal constraints,
Computer Vision and Pattern Recognition, 1998.
Proceedings. 1998 IEEE Computer Society
Conference on, vol., no., pp.898-904, 23-25 Jun 1998
doi: 10.1109/CVPR.1998.698711.
Popa, M., Koc, A. K., Rothkrantz, L. J. M., Shan, C., and
Wiggers, P. (n.d.). Kinect Sensing of Shopping related
Actions.
Rashid, Rick. 1980. LIGHTS: a system for interpretation
of moving light displays. Ph.D. thesis, University of
Rochester Computer Science Department.
Ryoo, M. (2011). Human activity prediction: Early
recognition of ongoing activities from streaming
videos. Computer Vision (ICCV), 2011 IEEE, (Iccv).
Retrieved from http://ieeexplore.ieee.org/xpls/abs_all.
jsp?arnumber=6126349.
Ryoo, M. S., and Aggarwal, J. K. (2008). Semantic
Representation and Recognition of Continued and
Recursive Human Activities. International Journal of
Computer Vision, 82(1), 1–24. doi:10.1007/s11263-
008-0181-1.
Ryoo, M.S. Aggarwal, J.K., Semantic Understanding of
Continued and Recursive Human Activities, Pattern
Recognition, 2006. ICPR 2006. 18th International
Conference on, vol.1, no., pp.379-378, 0-0 0 doi:
10.1109/ICPR.2006.1043.
Ryoo, M.S., Aggarwal, J.K. , Recognition of Composite
Human Activities through Context-Free Grammar
Based Representation, Computer Vision and Pattern
Recognition, 2006 IEEE Computer Society
Conference on, vol.2, no., pp. 1709- 1718, 2006 doi:
10.1109/CVPR.2006.242.
Sinha, S. N., Frahm, J., Pollefeys, M., and Genc, Y.
(2006). GPU-based Video Feature Tracking And
Matching, 012(May), 1–15.
Starner, T. Pentland, A., Real-time American Sign
Language recognition from video using hidden
Markov models, Computer Vision, 1995.
Proceedings., International Symposium on, vol., no.,
pp.265-270, 21-23 Nov 1995 doi:
10.1109/ISCV.1995.477012.
Uddin, M. Z., Byun, K., Cho, M., Lee, S., Khang, G., and
Kim, T.-S. (2011). A Spanning Tree-Based Human
Activity Prediction System Using Life Logs from
Depth Silhouette-Based Human Activity Recognition.
In P. Real, D. Diaz-Pernil, H. Molina-Abril, A.
Berciano, and W. Kropatsch (Eds.), Computer
Analysis of Images and Patterns (Vol. 6854, pp. 302–
309). Springer Berlin Heidelberg. doi:10.1007/978-3-
642-23672-3_37.
Vu, V., Bremond, F., Thonnat, M., Orion, P., Sophia, I. N.
R. I. A., Cedex, B.-S. A., Vu, T., et al. (2004).
Automatic Video Interpretation : A Novel Algorithm
for Temporal Scenario Recognition, 1–6.
Wang, J. (n.d.). Mining Actionlet Ensemble for Action
Recognition with Depth Cameras.
Yamato, J., Ohya, J. Ishii, K., Recognizing human action
in time-sequential images using hidden Markov
model, Computer Vision and Pattern Recognition,
1992. Proceedings CVPR '92., 1992 IEEE Computer
Society Conference on , vol., no., pp.379-385, 15-18
Jun 1992 doi: 10.1109/CVPR.1992.223161.
Yu, E. Aggarwal, J.K., Detection of Fence Climbing from
Monocular Video, Pattern Recognition, 2006. ICPR
HumanActivityRecognitionandPrediction
31

2006. 18th International Conference on , vol.1, no.,
pp.375-378, 0-0 0doi: 10.1109/ICPR.2006.440.
Ziebart, B. D., Ratliff, N., Gallagher, G., Mertz, C.,
Peterson, K., Bagnell, J. A., Hebert, M., et al. (2009).
Planning-based prediction for pedestrians. 2009
IEEE/RSJ International Conference on Intelligent
Robots and Systems, 3931–3936. doi:10.1109/IROS.
2009.5354147.
ICPRAM2015-DoctoralConsortium
32
