
Impressions of Size-Changing in a Companion Robot
Martin Cooney and Stefan M. Karlsson
Intelligent Systems Lab, Halmstad University, Box 823, 301 18 Halmstad, Sweden
Keywords: Adaptive Interfaces, Physiology-driven Robotics, Human-Robot Interaction, Size-Changing.
Abstract: Physiological data such as head movements can be used to intuitively control a companion robot to perform
useful tasks. We believe that some tasks such as reaching for high objects or getting out of a person’s way
could be accomplished via size changes, but such motions should not seem threatening or bothersome. To
gain insight into how size changes are perceived, the Think Aloud Method was used to gather typical
impressions of a new robotic prototype which can expand in height or width based on a user’s head
movements. The results indicate promise for such systems, also highlighting some potential pitfalls.
1 INTRODUCTION
The current paper reports on the first phase of our
work in designing a novel physiological computing
system involving a companion robot which can
adapt its size. Size-changing functionality in a robot
will allow useful behaviour such as stretching to
reach for objects or attract attention, as well as
shrinking to be carried, get out of the way in urgent
situations, or operate in narrow spaces. This concept
is shown in Figure 1.
One challenge is that size strongly influences our
impressions: we can feel reverence toward high
mountains, trepidation toward a large predator,
affection toward a small infant, and disregard for a
mote of dust. When a robot changes size based on a
user’s commands, it should be perceived as fun and
helpful and not as dangerous or bothersome.
Thus the goal of the current study was to obtain
knowledge of how a robot’s size-changing will be
perceived by people. The investigated scenario
involved a humanoid prototype as a familiar
interface—simplified to avoid eliciting unreal
expectations—and basic size changes in height and
width, which could be perceived differently. To
eavesdrop on user impressions, the Think Aloud
Method (Lewis and Rieman, 1993) was used. The
acquired knowledge—a list of size changes and
typical associated impressions—will be extended in
the next step of our work, in which we will focus on
specific size-changing tasks, thereby informing a
next generation of size-adaptive robot systems.
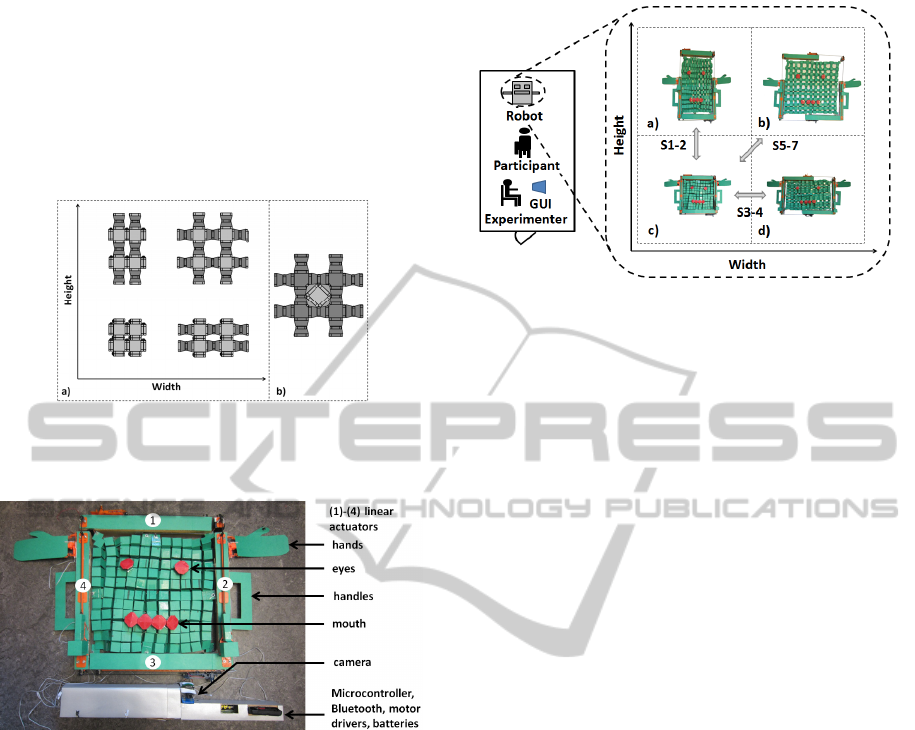
Figure 1: The basic concept for our system: a user’s
physiological signals are transformed via a Graphic User
Interface (GUI) into commands for a robot to change
size—e.g., becoming (a) thin to let someone pass, (b) large
to attract attention, (c) small to be more easily held, or (d)
wide in order to access a far object—which should be
perceived by the user as pleasant and unthreatening.
2 RELATED WORK
This work touches on three areas—physiology-
driven robotic interfaces, size-changing artifacts and
perception of size-changing cues.
2.1 Physiological Interfaces
Fairclough et al. described various forms of
physiological computing—mouse and keyboard,
body tracking, muscle or gaze, and Brain Computer
Interfaces (BCI) (2011)—which have also been used
118
Cooney M. and M. Karlsson S..
Impressions of Size-Changing in a Companion Robot.
DOI: 10.5220/0005328801180123
In Proceedings of the 2nd International Conference on Physiological Computing Systems (PhyCS-2015), pages 118-123
ISBN: 978-989-758-085-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

to control robotic devices. For example, a BCI
interface was used to control a wheelchair and
devices in an intelligent environment (Kanemura et
al., 2013). Fiber optic sensors detecting finger
motions were used to control two extra fingers (Wu
and Asada, 2014). And, a head tracker was used to
control the humanoid robot PR2 to allow a
tetraplegic person to scratch himself and wipe his
face (Cousins and Evans, 2014). We selected the
latter kind of approach, which is easy to use and
inclusive as arms are not required.
For head pose estimation, promising work is
being conducted using active appearance models
(AAM) (Cootes et al., 1992), but challenges with
lighting and lack of temporal consistency can lead to
jitter in estimates. An approach intended for
controlling a cursor, “eViacam”, estimates overall
head position in video using the Viola Jones detector
(eviacam.sourceforge.net). The approach we propose
is faster and smoother, utilizing less computational
resources and optical flow to track a face in between
detected frames.
2.2 Size-Changing Artifacts
The need for adaptive companion robots has been
voiced (Dautenhahn, 2004). Already, simple size
changes such as becoming longer or taller can be
enacted by some factory and tele-operated robots;
more complex changes can also be achieved using
multiple modules (Alonso-Mora et al., 2012; Revzen
et al., 2011), objects (Brodbeck and Iida, 2012), and
approaches such as “jamming” (Steltz et al., 2009)
or programmable matter/4d printing (An et al.,
2014). Outside of robotics, size-changing
mechanisms involving (1) elastic/absorbent
materials, (2) telescopic cylinders, (3) scissor
linkages, (4) folding, and (5) rack and pinions, have
been used to build artifacts such as (1) balloons; (2)
construction vehicles; (3) furniture, elevators,
architectural displays and toys (e.g., Hoberman’s
combinable Expandagon blocks); (4) maps, satellites
(Miura, 1985) and medicinal devices (You and
Kuribayashi, 2003); as well as (5) locomotive
devices. Unknown was how to build a robot which
can expand in height or width.
2.3 Perception of Size Changes
Some pioneering studies showed that tall robots can
appear more conscientious and human-like and less
neurotic (Walters et al., 2009), and more dominant
(Rae and Mutlu, 2013) than short robots. Also, in
comparing simulations of shape changes in a cell
phone, growing larger evoked a strongest emotional
response in terms of both pleasure and arousal, as
well as a highest sense of animacy, and seemed
highly desirable (Pedersen et al., 2014). These
results suggested the usefulness of investigating how
size changes are perceived in a robot.
Human and animal cues offered some additional
insight. Height-wise expansion can seem dominant
with an erect posture (Carney et al., 2005), draw
attention as in hand-raising, or indicate curiosity if
conducted to see over an obstacle. Height-wise
contraction expressed through a downcast face can
indicate shame or dejection (Darwin, 1872), or
focused tension, like a crouched runner ready to
spring forward. Width-wise expansion can indicate
dominance when an expansive open posture with
extended limbs is adopted (Carney et al., 2005), or
happiness from a full belly, through satisfying an
important need (Maslow, 1943). Width-wise
contraction can indicate tension via a closed posture
(Burgoon, 1991), or suffering through a metaphor of
malnourishment or dehydration. Becoming small
can express fear as cowering (Darwin, 1872), and
possibly cuteness because small size is a
characteristic of children (Lorenz, 1971). Thus,
many predictions could be made, which required
investigation to determine if they would apply to the
case of a robot.
Thus, the contribution of the current work is
acquiring some first knowledge of how people
perceive a robot’s size changes using a new
humanoid prototype capable of itself expanding and
contracting in both or either height and width.
3 SUICA: A SIZE-CHANGING
HUMANOID PROTOTYPE
Design of our new prototype, Suica, involved (1) a
proof-of-concept physiological computing interface
and (2) an embodiment with a cover and size-
changing mechanism.
3.1 Control Interface
Our requirements for an interface included that it
would be robust, simple, fast, and provide a natural
mode of interaction without the use of arms. Also
we restricted ourselves to the scenario of a single
user controlling one robot with a computer.
The designed interface uses a standard low-end
web camera to acquire video data at 30 frames per
second. An elliptic region containing a frontal face
ImpressionsofSize-ChanginginaCompanionRobot
119

was detected at 1Hz (one frame per every 30
processed) using the Viola-Jones detection algorithm
provided with Matlab/Computer Vision Toolbox
(www.mathworks.se). Optical flow was calculated
similar to the Lucas-Kanade approach (Lucas and
Kanade, 1981), yielding a dense flow by
regularization (Karlsson and Bigun, 2012). Optical
flow was used for two purposes. First, to implement
a smooth tracking of the face region in frames for
which the Viola Jones algorithm was not invoked.
Second, optical flow with support from inside the
tracked face region was used to control the
computer’s mouse cursor. To achieve smooth,
natural motions of the cursor, a concept of
momentum was also implemented in which optical
flow affects a particle of small mass (the cursor)
with a force in a surrounding of high friction.
The system was implemented entirely in Matlab,
and worked well on a resolution as low as 200 by
200 pixels. At that resolution, the application took
up roughly 14% of the CPU load, without skipping
any frames, whereas the well-written C-
implementation of “eViacam” took up roughly 25%
(as measured on a Lenovo ThinkPad X1 Carbon
laptop, with an Intel Core i5 microprocessor, 1.80
GHz, and 4GB RAM).
Also VoxCommando (voxcommando.com) was
used to quickly associate a speech command with a
mouse click event. Using this system and a GUI we
built, a user can turn their head in any direction (e.g.,
left, right, up, or down) and say “right click” to issue
commands for a robot to change size.
3.2 Embodiment
When changing size, a robot should be covered to
protect nearby persons from potential injury. Our
requirements for a cover were: robustness, ease of
changing and retaining sizes (low energy and
“multistability”), light weight, and compactness.
(Water-proofing was not felt to be a priority for the
current study.) Also we focused on the scenario of a
(1) flat, (2) rectangular area which can be scaled (3)
along its principal axes. (1) Curvature was not
considered for simplicity. Also, because we wished
to consider the simplest case of a plane for our initial
investigation, we did not require our prototype to
stand but decided it could be laid on the floor in
front of a user. (2) Although triangles are also
important because they can be used to build all other
shapes, a rectangle was chosen due to relevance in
engineering for modeling objects (box modeling), as
well as in psychology because many fabricated
objects are rectangular, and a single rectangle better
approximates the frontal humanoid form in two
dimensions. (3) Shear transformations were not
considered because shape is not preserved.
To create a cover, a simple solution involving an
elastic material such as latex could have problems
such as tearing, deterioration, force required to
maintain an expanded state, slack in the contracted
state, and allergies in some interacting persons.
Therefore, we instead designed and implemented a
folding pattern as shown in Figure 2, composed of
squares connected by V-shaped strips (contracted:
27.5cm, expanded: 77.5cm). This plane can be made
arbitrarily flat and holes too small for a person’s
fingers to pass through by reducing the length of the
sides of the squares and connecting strips, or
covering with a top layer.
In addition to a cover, a size-changing frame was
constructed using four rack and pinion style linear
actuators, as can be seen in Figure 3. Bluetooth and
a camera were included to issue motor commands
and capture video. Typical features of a humanoid
companion robot such as simplified face with a
neutral expression and moving hands were also
added to provide a feeling of human-likeness and
familiarity. Although Suica is only a prototype with
various limitations, unlike previous artifacts it can
expand and contract in height, width, or both, while
presenting a safe, complete appearance.
4 IMPRESSIONS OF A
SIZE-CHANGING ROBOT
To gain insight into how changes in height and
width are perceived in a robot, a study was
conducted with Suica using the Think Aloud Method
(Lewis and Rieman, 1993). This method was useful
because we did not know how people would
perceive size changes.
4.1 Participants
Eight participants (age: M = 33.5 years, SD = 9.6, 2
female, 6 male) working at a university lab in
Sweden participated for approximately 30 minutes
each and were not remunerated.
4.2 Procedure
Each participant sat in front of Suica in a small room
and the door was closed, leaving them alone with the
experimenter, as in Figure 4. A simple handout
introduced our robot and stated that they could
PhyCS2015-2ndInternationalConferenceonPhysiologicalComputingSystems
120
freely speak any thoughts that came to mind. When
ready, participants imagined interacting and watched
the prototype change size, describing aloud what
they saw. Suica was controlled by the experimenter
to reduce participants’ workload and ensure the
same stimuli were witnessed by all. Afterwards,
short interviews were conducted and transcribed
protocols coded by the experimenter.
Figure 2: Size-changing cover: (a) a main layer which
enables changes in height and width, and (b) an optional
top layer (shown lightly shaded over the dark main layer).
Figure 3: Actual photo of our humanoid prototype, Suica,
indicating component locations.
4.3 Conditions
Seven size changes were shown in random order:
S1 Tall: the robot became tall from a small state
(a transition from state “c” to “a” in Figure 4)
S2 Short: the robot became small from a tall state
(Figure 4 “a” to “c”)
S3 Wide: the robot became wide from a small
state (Figure 4 “c” to “d”)
S4 Thin: the robot became small from a wide state
(Figure 4 “d” to “c”)
S5 Large: the robot became tall and wide from a
small state (Figure 4 “c” to “b”)
S6 Small: the robot became short and thin from a
large state (Figure 4 “b” to “c”)
S7 Repeated: the robot expanded and contracted
three times (Figure 4 “c” to “b”).
Figure 4: Experiment layout and depiction of the seven
size changes which participants observed (S1-7) using
actual photos of our prototype, Suica, changing between
four states: (a) tall, (b) large, (c) small, and (d) wide.
4.4 Predictions
We had some expectations of how size changes
would be perceived based on the literature in Section
2.3 and our own ideas (the term “intimidating” was
used in place of “dominant” to try to avoid
specialized words which participants might not use).
P1 Tall: Height-wise expansions would appear
intimidating, show a desire for attention, or
indicate curiosity.
P2 Short: Height-wise contractions would
indicate shame or focused tension.
P3 Wide: Width-wise expansions would appear
intimidating or show contentment.
P4 Thin: Width-wise contractions would show
tension or suffering.
P5 Large: Becoming large in both height and
width would appear intimidating.
P6 Small: Becoming small in both height and
width would appear cute or indicate fear.
P7 Repeated: Repeated changes would be
perceived as playful.
4.5 Results
Typical impressions common to more than one
participant, shown in Table 1, were analyzed in
regard to (1) positivity, (2) consistency, (3) and
agreement with our predictions. (1) A Chi-squared
test did not reveal a difference in the prevalence of
positive, neutral, and negative impressions: χ²(2, N =
54) = 0.8, p = .7, indicating promise for
communicating various cues. (2) Some consistency
was also observed: expansions were reported as
showing incredulousness similar to eyebrows rising
or eyes opening wide, and contractions were
ImpressionsofSize-ChanginginaCompanionRobot
121

Table 1: Typical impressions of size changes (bold font
and italics show predicted and related impressions; solid
and dotted lines show positive and negative impressions).
Size Change
(Prediction)
Impressions
(No. of participants)
S1 Tall (P1) incredulous (3), angry (2)
S2 Short (P2)
sad (3), fearful (2), attentive (2),
angry (2), responding (2)
S3 Wide (P3)
smiling (3), happy (2),
incredulous (2)
S4 Thin (P4)
attentive (3), fearful (2), attractive
(2)
S5 Large (P5) intimidating (4), unnatural (2)
S6 Small (P6)
cute (4), fearful (2), attentive (2),
face more visible (2)
S7 Repeated (P7)
ebullient (3), wanting to show
something (3), disagreeing (2)
perceived as cute, fearful, or attentive. (3)
Predictions were partially supported in only 4/7
cases, with only 28% and 57% of impressions
directly predicted or related to predictions. The
reason is the high complexity of human signalling
(many related cues exist with similar expression),
and interpretation required to associate robot size
changes with biological motions. We feel that the
number of unanticipated impressions confirmed that
it had been useful to attempt to gain insight into the
kinds of impressions which result from observing
size changes.
Some impressions were not directly predicted but
related to our predictions. For P1, the robot was
described as angry rather than intimidating, which
could have been because anger displays intimidate
(Clark, Pataki and Carver, 1996). For S2 and S4,
impressions of fearfulness related to P6, for
becoming smaller. For P2, P4 and P6, although one
participant was reminded of the focused tension of a
player in a Judo match, attentiveness was attributed
in place of tension; these two constructs have been
grouped as “activation” (Tonn, 1984). For P4, fear
was perceived in place of suffering, which relate as
fear exerts unpleasant physical effects. For P7
repeated changes were described not as playful but
as happy and excited, like jumping for joy or a dog
wagging its tail; these concepts relate, as “cheerful”
and “joyous” have been listed as synonyms for
playfulness (www.thesaurus.com/browse/playful).
Some results were unanticipated. For P1, only
one participant reported feeling that Suica desired
attention by becoming taller because we had asked
participants to watch the robot, and curiosity was not
perceived as there was no obstacle to see over. For
P2, impressions of shame were not reported,
possibly because shame is conveyed by gaze
directed toward the ground (whereas Suica’s eyes
always looked forward). For P3, the widening robot
seemed to be smiling, laughing, finding humor in
something, and otherwise happy; however this was
due to a Cheshire Cat-like widening of the robot’s
mouth and not to the robot seeming like it had a full
belly as we had predicted.
5 DISCUSSION AND
CONCLUSIONS
Results of the current study were encouraging. The
main contribution of the study was to identify a rich
range of positive and negative impressions which
people associate with size changes in a robot.
Positive impressions included that our robot
appeared cute and attentive when contracting, and
happy when widening or repeatedly expanding and
contracting. Negative impressions included that the
robot seemed intimidating when expanding, angry
when thin, and fearful when contracting. This
suggests that to present a fun impression when being
controlled, a robot could seek to show mostly
positive signals, and accompany negative signals
with positive ones: e.g., a robot could smile while
expanding to accomplish a task then contract again.
Additionally, we built a physiological computing
interface based on head motion which could be used
by elderly or disabled persons and requires less
computational resources than previous work. We
also reported on the construction of a new prototype
companion robot, Suica, which can expand in height
or width (a video is available online, e.g., at the first
author’s homepage: martin-cooney.com).
These results are limited by the prototype used
and exploratory data acquisition design, including
the participants (a small number of researchers at a
university in Sweden). Our next step will be to
conduct a more solid experiment with a robot
capable of performing practical tasks such as
reaching for objects and getting out of the way. This
will indicate if perceptions differ based on a robot’s
task: e.g., will becoming large intimidate even if it is
known that a robot is reaching for a high object?
Physiological measurements such as skin
conductance and saliva hormone tests will provide
objective evidence of unpleasant impressions. We
also aim to design a new GUI in which a user can
control online the area and symmetry of a robot by
bringing their face closer or further away, and tilting
their head. Furthermore, impressions will be
investigated of changes in speed and depth (e.g.,
swiftness could indicate arousal and a thick or
PhyCS2015-2ndInternationalConferenceonPhysiologicalComputingSystems
122

paper-thin embodiment could indicate solid resolve
or indecision), as well as shear and local size
changes (e.g., skew could indicate discord, a large
head could seem intelligent or cute, and large eyes
or ears could express interest). Sensors and
mechanisms to improve symmetry, prevent some
drooping due to gravity and compensate for friction
will improve accurate transmission of cues.
ACKNOWLEDGEMENTS
We’d like to thank all those who helped! We
received funding from the Center for Applied
Intelligent Systems Research (CAISR) program,
Swedish Knowledge Foundation.
REFERENCES
Alonso-Mora, J., et al., 2012. Object and Animation
Display with Multiple Aerial Vehicles. In Proc. IROS,
1078-1083. DOI: 10.1109/IROS.2012.6385551.
An, B., et al., 2014. An End-to-End Approach to Making
Self-Folded 3D Surface Shapes by Uniform Heating.
In Proc. ICRA, 1466-1473. DOI:
10.1109/ICRA.2014.6907045.
Brodbeck, L., Iida, F., 2012. Enhanced Robotic Body
Extension with Modular Units. In Proc. IROS, 1428-
1433. DOI: 10.1109/IROS.2012.6385516.
Burgoon, J. K., 1991. Relational Message Interpretations
of Touch, Conversational Distance, and Posture.
Journal of Nonverbal Behavior 15 (4), 233-259. DOI:
10.1007/BF00986924.
Carney, D.R., Hall, J.A., Smith LeBeau, L., 2005. Beliefs
about the nonverbal expression of social power.
Journal of Nonverbal Behavior 29 (2), 105–123. DOI:
10.1007/s10919-005-2743-z.
Clark, M. S., Pataki, S. P., Carver, V. H., 1996. Some
thoughts and findings on self-presentation of emotions
in relationships. Knowledge structures in close
relationships: A social psychological approach, 247-
274.
Cootes, T. F., Taylor, C. J., Cooper, D. H., Graham, J.,
1992. Training models of shape from sets of examples.
In Proceedings of BMVC’92, 266-275.
Cousins, S., Evans, H., 2014. ROS Expands the World for
Quadriplegics. IEEE Robotics & Automation
Magazine 21 (2), 14-17.
Darwin, C. R., 1872. The expression of the emotions in
man and animals. London: John Murray. 1st edition.
Retrieved Nov. 4, 2014 from http://darwin-
online.org.uk/content/frameset?itemID=F1142&viewt
ype=text&pageseq=1.
Dautenhahn, K., 2004. Robots We Like to Live With? – A
Developmental Perspective on a Personalized, Life-
Long Robot Companion. In Proc. RO-MAN, 17-22.
DOI: 10.1109/ROMAN.2004.1374720.
Fairclough, S., Gilleade, K., Nacke, L.E., Mandryk, R.L.,
2011. Brain and Body Interfaces: Designing for
Meaningful Interaction. In Proceedings of CHI EA,
65-68. DOI: 10.1145/1979742.1979591.
Kanemura, A., et al., 2013. A Waypoint-Based
Framework in Brain-Controlled Smart Home
Environments: Brain Interfaces, Domotics, and
Robotics Integration. In Proc. IROS, 865-870. DOI:
10.1109/IROS.2013.6696452.
Karlsson, S. M., Bigun, J., 2012. Lip-motion events
analysis and lip segmentation using optical flow. In
Proc. CVPRW 2012, 138-145. DOI:
10.1109/CVPRW.2012.6239228.
Lewis, C., Rieman, J., 1993. Task-Centered User Interface
Design: A Practical Introduction. Technical Document.
Lorenz, K. 1971. Studies in Animal and Human Behavior.
Harvard Univ. Press, Cambridge, MA.
Lucas, B. D., Kanade, T., 1981. An Iterative Image
Registration Technique with an Application to Stereo
Vision. In Proc. IJCAI '81, 674-679.
Maslow, A. H., 1943. A theory of human motivation.
Psychological Review 50 (4), 370–96. DOI:
10.1037/h0054346.
Miura, K., 1985. Method of Packaging and Deployment of
Large Membranes in Space.
Inst. of Space and
Astronaut. Science report 618, 1-9.
Pedersen, E. W., Subramanian, S., Hornbæk, K., 2014. Is
my phone alive?: a large-scale study of shape change
in handheld devices using videos. In Proc. CHI, 2579-
2588. DOI: 10.1145/2556288.2557018.
Rae, I., Takayama, L. Mutlu, B, 2013. The influence of
height in robot-mediated communication. In Proc.
HRI, 1-8. DOI: 10.1109/HRI.2013.6483495.
Revzen, S., Bhoite, M., Macasieb, A., Yim, M., 2011.
Structure synthesis on-the-fly in a modular robot. In
Proc. IROS, 4797-4802. DOI:
10.1109/IROS.2011.6094575.
Steltz, E., et al., 2009. JSEL: Jamming Skin Enabled
Locomotion. In Proc. IROS, 5672-5677. DOI:
10.1109/IROS.2009.5354790.
Tonn, B. E., 1984. A sociopsychological contribution to
the theory of individual time-allocation. Environment
and Planning A 16 (2), 201-223.
Walters, M. L., Koay, K. L., Syrdal, D. S., Dautenhahn,
K., Boekhorst, R., 2009. Preferences and Perceptions
of Robot Appearance and Embodiment in Human-
Robot Interaction Trials. In Proc. New Frontiers in
Human-Robot Interaction: Symposium at AISB09,
136-143.
Wu, F. Y., Asada, H. H., 2014. Bio-artificial synergies for
grasp posture control of supernumerary robotic fingers.
In Proc. Robotics: Science and Systems.
You, Z., Kuribayashi, K., 2003. A Novel Origami Stent.
In Proc. Summer Bioengineer Conf.
ImpressionsofSize-ChanginginaCompanionRobot
123
