
Design, Implementation and Simulation of an Experimental Processing
Architecture for Enhancing Real-time Video Services by Combining
VANET, Cloud Computing System and Onboard Navigation System
K. Hammoudi
1,2
, N. Ajam
1,2
, M. Kasraoui
1
, F. Dornaika
3,4
, K. Radhakrishnan
2,∗
, K. Bandi
2,∗
, Q. Cai
2,∗
and S. Liu
2,∗
1
Research Institute on Embedded Electronic Systems (IRSEEM), IIS Group, St-Etienne-du-Rouvray, France
2
ESIGELEC School of Engineering, Department of ICT (
∗
MS Students), St-Etienne-du-Rouvray, France
3
Department of Computer Science and Artificial Intelligence, University of the Basque Country, San Sebasti
´
an, Spain
4
IKERBASQUE, Basque Foundation for Science, Bilbao, Spain
Keywords:
Vehicular Network (VANET), Vehicular Cloud Computing (VCC), Image-based Recognition, Fusion of
Multi-source Imagery, Real-time Video Services, Cooperative Monitoring System, Sensor Networks.
Abstract:
In this paper, we propose a design for novel and experimental cloud computing systems. The proposed sys-
tem aims at enhancing computational, communicational and annalistic capabilities of road navigation services
by merging several independent technologies, namely vision-based embedded navigation systems, prominent
Cloud Computing Systems (CCSs) and Vehicular Ad-hoc NETwork (VANET). This work presents our initial
investigations by describing the design of a global generic system. The designed system has been experi-
mented with various scenarios of video-based road services. Moreover, the associated architecture has been
implemented on a small-scale simulator of an in-vehicle embedded system. The implemented architecture has
been experimented in the case of a simulated road service to aid the police agency. The goal of this service is
to recognize and track searched individuals and vehicles in a real-time monitoring system remotely connected
to moving cars. The presented work demonstrates the potential of our system for efficiently enhancing and
diversifying real-time video services in road environments.
1 INTRODUCTION AND
MOTIVATION
In this work, we propose to exploit cloud computing
systems for developing real-time road video services
from embedded navigation systems and VANETs
(Vehicular Ad-hoc NETworks). The proposed sys-
tems will have a final objective to be experimented on
a vehicle fleet. More particularly, this paper presents
the design, the implementation and the simulation
parts of a cloud-based recognition system for extend-
ing real-time road video services. Indeed, the pro-
posed global generic system will exploit a cloud-
based embedded recognition systems and VANET
technologies; on the one hand, for analyzing the road
traffic (e.g.; vehicular or navigation information) and
on the other hand, for mutualizing the computational
resources as well as for sharing relevant information
visually extracted. Notably, the designed system will
be useful for identifying dynamical Points Of Interest
from embedded cameras (e.g., traffic-based POI) and
then sharing the identified POIs to external stakehold-
ers potentially interested (e.g., surrounding vehicles
or road agencies).
For instance, these technologies can be exploited
for improving the road traffic, the emergency map-
ping or the citizen security by cooperatively analyzing
acquired georeferenced road images. Respectively,
we present below some scenarios that will be based
on the detection of dynamical POIs:
• Sc. 1: a vehicle can detect an available parking
area and to transmit its GPS location in a pre-
defined neighborhood for informing surrounding
drivers by exploiting a cloud computing system
and VANET,
• Sc. 2: each vehicle can similarly transmit im-
ages for analyzing and mapping the road mete-
orology in real-time. Thus, drivers can define an
itinerary based on meteorological criteria, notably
to reduce the moving in areas having bad weather
(e.g., snowy roads),
• Sc. 3: a vehicle can extract on-the-fly the license
plate of preceding vehicles and then, sending
the extracted plate characters to police services
174
Hammoudi K., Ajam N., Kasraoui M., Dornaika F., Radhakrishnan K., Bandi K., Cai Q. and Liu S..
Design, Implementation and Simulation of an Experimental Processing Architecture for Enhancing Real-time Video Services by Combining VANET,
Cloud Computing System and Onboard Navigation System.
DOI: 10.5220/0005330201740179
In Proceedings of the 5th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2015), pages
174-179
ISBN: 978-989-758-084-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
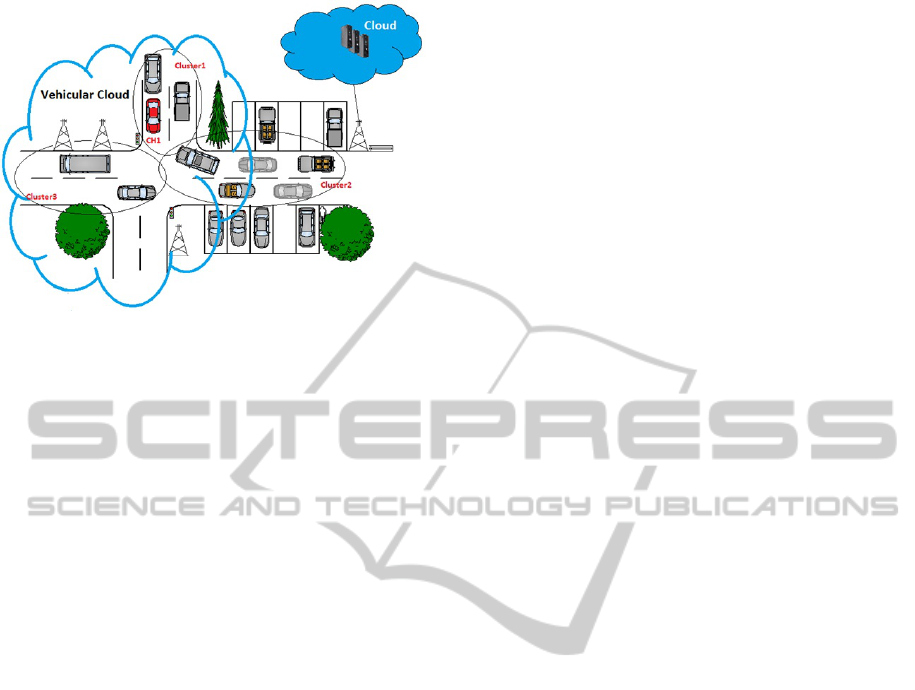
Figure 1: Illustration of the designed cloud computing sys-
tem.
searching to localize stolen vehicles by matching
extracted data with their reference databases,
• Sc. 4: similarly, a vehicle can extract on-the-fly
people faces from the streets and then, sending the
extracted face images to police services that aim
to localize searched individuals.
In this study, we have experimented the proposed
cloud-based system by considering the last scenarios
related to the police service application.
2 RELATED WORK
Nowadays, cloud computing developments are revo-
lutionizing the world by providing to companies more
and more powerful services. In particular, many com-
panies tend to store their data on external servers or
data centers. Indeed, this technology improves the
Quality of Service (QoS); notably for the data man-
agement, the data security as well as for the data dis-
tribution. By this way, the providers of cloud com-
puting systems allow many companies to develop ser-
vices specifically focused on their principal activi-
ties. More precisely, cloud computing can be defined
as a technology providing resources at three levels,
namely infrastructures, software platforms and ser-
vices (Whaiduzzaman et al., 2014). The cloud com-
puting was initially employed through wire-based net-
work for internet and it has been progressively ex-
tended to the mobile network (e.g., through cellular
networks). Notably, the cloud computing technolo-
gies facilitate the development of hybrid systems as
well as the mutualizing of computational resources.
In this work, we are particularly interested by the
development of cloud computing systems on the basis
of VANET for enhancing and diversifying real-time
road services.
VANET networks have the particularity to ex-
ploit Ad-hoc systems. In other terms, these systems
are self-organizing in the sense that each of them
can communicate with others without the necessity
of exploiting a pre-defined infrastructure. The de-
velopment of VANET had a primary goal of sup-
porting Intelligent Transport System through Vehicle-
to-Infrastructure (V2I) and Vehicle-to-Vehicle (V2V)
communications (e.g., (Maslekar, 2011)).
Besides, the novel generation of general pub-
lic vehicles is equipped with computer-aided embed-
ded navigation and vision systems such as Advanced
Driver Assistance Systems (ADAS systems). In par-
ticular, ADAS systems are more and more employed
for detecting road obstacles (e.g.; self-parking) or
for detecting the visibility degree of roads (e.g.; au-
tomatic lighting systems). In parallel, experimen-
tal multi-camera vehicle systems are actively devel-
oped for the research in the fields of cartography
and machine vision in order to reconstruct urban
environments in 3D as well as to develop full au-
tonomous navigation vehicles (Hammoudi and Mc-
Donald, 2013; Hammoudi et al., 2013).
To the best of our knowledge, video services in
vehicular clouds are not very developed. In (Gerla
et al., 2013), Gerla et al. presented an image-on-
demand service named “Pics-on-wheels” where some
vehicles will send their acquired images for example
by analyzing detected accidents. These images can
then be used for assurance claims. In our case, we
present a generic cloud computing system that could
be used for developing various real-time video ser-
vices by exploiting a distributed computing system.
Notably, this system will be employed for sharing
traffic information (e.g.; in aided-navigation or road
safety) by exploiting embedded vision-based systems
(e.g., recognition system), CCSs and VANETs (see
Figure 1). First results of our work were presented at
a French-speaking seminar on vision-based process-
ing (CORESA). This paper presents an extended work
which describes in more detail the design of the sim-
ulator as well as the proposed processing architecture
and use cases.
3 PROPOSED GLOBAL GENERIC
SYSTEM FOR REAL-TIME
ROAD VIDEO SCENARIOS
In our case, it is assumed that the vehicles will be
equipped with embedded camera system, a GPS mod-
ule and a VANET connecting system (802.11p). No-
tably, new generation vehicles are equipped with var-
Design,ImplementationandSimulationofanExperimentalProcessingArchitectureforEnhancingReal-timeVideo
ServicesbyCombiningVANET,CloudComputingSystemandOnboardNavigationSystem
175
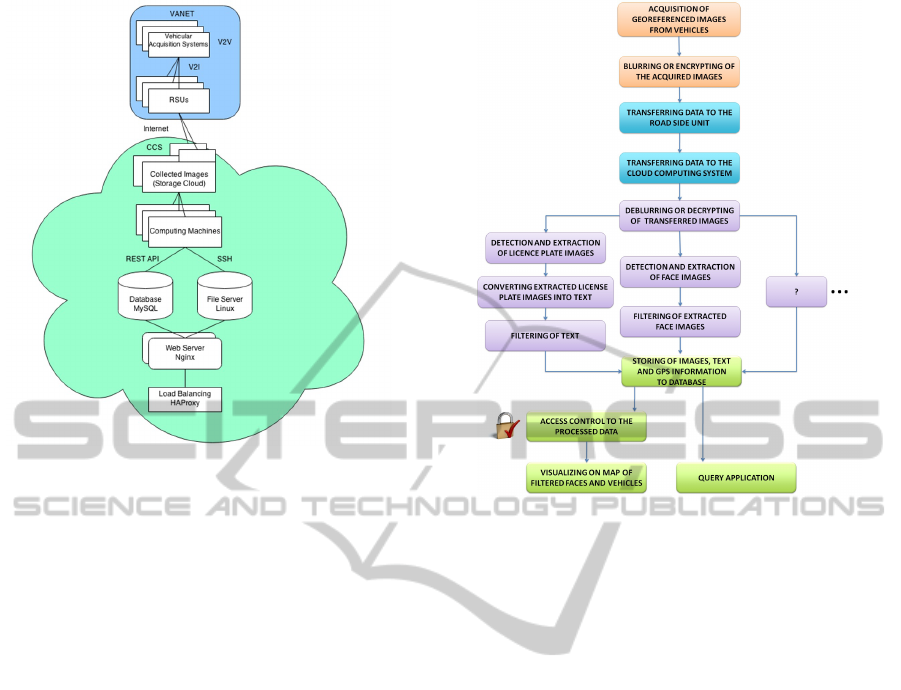
Figure 2: Proposed processing architecture of a global
generic system.
ious types of sensors such as cameras located at the
front and rear end. The proposed vision-based cloud
computing system will take advantage of distributed
computing and storing capabilities of conventional
CCS and VANET (see Figure 1) for providing video
services requiring high resources in term of data pro-
cessing. In particular, the proposed system will be
useful for visually recognizing dynamical objects of
interest such as, for the search of stolen vehicles or
individuals.
More precisely, the proposed system will exploit
vehicular networks or external data center according
to the needs. Yu et al. classify some cloud-based sys-
tems related to VANET (Yu et al., 2013). First, ve-
hicular cloud is exclusively composed of vehicles. It
allows vehicles to dynamically schedule on demand
computational and storage resources. Second, road-
side cloud is composed of dedicated servers and RSUs
(Road Side Units). The later permits access to the
cloud. This cloud is exclusively used by vehicles lo-
calized within the radio coverage of the RSU. Vehi-
cles roam between successive RSUs to continuously
benefit from the service. Third, central cloud is based
either on dedicated servers in the Internet or data cen-
ters on VANET itself. In our case, we are using
the concept of Hybrid Vehicular Cloud (HVC) which
shares the processing between the Vehicular Cloud
(VC) and the central cloud.
Moreover, we visualize in Figure 2 the architec-
ture that has been developed for supporting the var-
ious data transfer and data processing. First, vehi-
cles communicate with internet access point by using
Figure 3: Proposed global dataflow diagram.
vehicle to infrastructure (V2I) or vehicle to vehicle
(V2V) communications. RSUs are exploited for re-
moving redundancy in captured images and GPS in-
formation. Second, the collected georeferenced raw
data are then sent to a customized storage cloud (e.g.;
Amazon cloud). Computing machines continuously
run the face extraction, GPS extraction and number
plate recognition algorithms in parallel. The extracted
license plate numbers as well as the extracted GPS
information are saved in a database (textual informa-
tion). The extracted images are copied to file servers.
Users access the service by connecting to a load bal-
ancing server, which distributes the requests to several
working web servers.
In Figure 3, we observe the global dataflow dia-
gram of experimented scenarios (Sc.3 − 4). As can
be observed, it worth mentioning that our architecture
can also be used for the processing of other scenar-
ios related to new real-time road video services (e.g.;
Sc.1 − 2).
4 EXPERIMENTAL RESULTS
4.1 Developed Indoor Vehicular
Monitoring Simulator
Figure 4 shows a drawing of the designed small-scale
car model, i.e. chassis of the indoor simulator (Sub-
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
176

(a) Drawing of the designed car model (2D views).
(b) Built car model with embedded devices.
Figure 4: Designed small-scale car pieces and its corre-
sponding built car model (final chassis of the simulator).
figure 4(a)) as well as the corresponding built car
model (Sub-figure 4(b)). The drawing presented in
Sub-figure 4(a) includes 2D views of major car pieces
and their associated dimensions (drawing done by us-
ing a Computer Aided Design software named Cad-
Std
1
). Annotated car dimensions correspond to those
of a standard sedan approximately reduced by a fac-
tor of 7. Sub-figure 4(b) illustrates the car model
painted (rigid mock-up) and equipped with its embed-
ded monitoring system.
Figure 5 shows the developed embedded monitor-
ing simulator in more detail. This vehicular monitor-
ing simulator is composed of the car model as well as
its associated vision-based embedded system. More
precisely, this embedded system is equipped with a
Logitech HD camera (see Sub-figure 5(a)) connected
to a Raspberry Pi micro-computer (see Sub-figure
5(b)). This micro-computer includes a SD card for
storing the acquired images. For simulating the mov-
ing of the car prototype, a screen has been placed in
front of the webcam and a video corresponding to a
vehicle path acquired by an external Mobile Mapping
System has been filmed (e.g., videos from the Kitty
research dataset
2
(Geiger et al., 2012; Fritsch et al.,
1
http://www.cadstd.com/
2
http://www.cvlibs.net/datasets/kitti/
(a) Acquisition part. (b) Processing part.
(c) Vehicular monitoring simulator (Overall view).
Figure 5: Detailed parts of the developed vision-based em-
bedded system and indoor configuration of the test bench
for experimenting road video services in real-time.
2013)). For such databases, the GPS information re-
lated to the images are provided. An overall view of
the vehicular monitoring simulator is depicted in Sub-
figure 5(c). Moreover, the micro-computer includes a
wifi adapter that was used for simulating the VANET
network. This embedded car prototype is connected
to three workstations, the one simulating the RSU, the
two others simulating the cloud nodes.
4.2 Implemented Architecture of the
Proposed Global Generic System
More precisely, two python scripts are running on
Raspberry Pi, one aims to capture images and to geo-
tag them, and the other aims to transfer the images
to RSU by FTP. In RSU, a bash script is written
to send those images to two simulated cloud nodes
by using SSH. By this way, the data flow is evenly
distributed to the cloud nodes through WiFi. The
computing machines (also cloud nodes) will process
the images in storage servers and get the extracted
faces, license plates and GPS information by run-
ning a python script invoking the corresponding algo-
rithms. On the web server, we implemented a REST-
ful API to access the database. The extracted images
are archived in file servers, while the license num-
ber, GPS and time are updated to the database. Thus,
the updated information can be visualized. Moreover,
new extraction algorithms can be developed for vari-
Design,ImplementationandSimulationofanExperimentalProcessingArchitectureforEnhancingReal-timeVideo
ServicesbyCombiningVANET,CloudComputingSystemandOnboardNavigationSystem
177

Table 1: Time information associated to the data transfer
and data processing for one image. Data is processed on
Intel Core i5 workstations of 2.4GHz under Windows 8.1
64 −bit with 4GB of RAM.
Image transferring Time (sec.) Image processing Time (sec.)
Rasberry Pi to RSU 1.33 Face extraction 1.08
RSU to cloud nodes 1.12 License plate extraction 3.29
ous query applications.
4.3 System Application and Evaluation
In this study, applications related to police ser-
vices previously mentioned (Scenarios 3 − 4) have
been experimented by deploying computer vision ap-
proaches well-known for their efficiency on the pro-
posed generic processing architecture (one simulated
mobile node). Notably, open-source CSharp Emgu
CV routines
3
have been exploited for carrying out
the face extraction as well as the OCR-based license
plate extraction. Data matching has been experi-
mented by comparing extracted features with a refer-
ence database generated by an operator. The proposed
experimentation pipeline distributes the flow of col-
lected images and extracted features are localized and
labeled on Google Maps-based application in quasi
real-time. Time information associated to the data
transfer and data processing for one image of 16.5Kb
(resolution of 640x480) can be observed in Table 1.
5 CONCLUSIONS AND FUTURE
WORKS
This paper presents our initial investigations for the
design, the implementation and the simulation of a
cloud computing system for enhancing and diversify-
ing real-time video services through VANET and On-
board Navigation Systems. A vehicular monitoring
simulator has been developed for carrying out indoor
experiments. A generic hardware and software archi-
tecture is proposed for experimenting new video ser-
vice applications. Accordingly, next stage will consist
of transferring this technology on two modular chas-
sis that will be fixed on vehicle windshields for ex-
periments in real mobile conditions (i.e., two moving
nodes). Moreover, research will be pursued in indoor
for improving the architecture of the developed simu-
lator and simulations of the network architecture will
be implemented under ns2
4
and ns3
5
Network Sim-
ulators. Furthermore, we will tackle research in im-
3
http://www.emgu.com/
4
http://nsnam.isi.edu/nsnam/
5
http://www.nsnam.org/
Figure 6: Illustration of a scenario related to the detection
of available parking areas by exploiting VANET.
agery for the detection of available parking areas in
order to develop parking services. A corresponding
targeted application was described in Scenario 1 and
has been illustrated in Figure 6.
Additionally to the development of research activ-
ities, it is worth mentioning that the described pro-
cessing architecture can also be used to support ped-
agogical activities on embedded systems; notably in
project-based learning.
ACKNOWLEDGEMENTS
This work is part of the SAVEMORE project
6
. The
SAVEMORE project has been selected in the con-
text of the INTERREG IVA France (Channel) - Eng-
land European cross-border co-operation programme,
which is co-financed by the ERDF.
REFERENCES
Fritsch, J., Kuehnl, T., and Geiger, A. (2013). A new per-
formance measure and evaluation benchmark for road
detection algorithms. In International Conference on
Intelligent Transportation Systems (ITSC).
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the KITTI vision benchmark
suite. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Gerla, M., Weng, J. T., and Pau, G. (2013). Pics-on-wheels:
Photo surveillance in the vehicular cloud. In IEEE
International Conference on Computing, Networking
and Communications (ICNC), pages 1123–1127.
Hammoudi, K., Dornaika, F., Soheilian, B., Vallet, B., Mc-
Donald, J., and Paparoditis, N. (2013). A synergis-
tic approach for recovering occlusion-free textured
3D maps of urban facades from heterogeneous car-
tographic data. International Journal of Advanced
Robotic Systems, 10:10p.
6
http://www.savemore-project.eu/
PECCS2015-5thInternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
178

Hammoudi, K. and McDonald, J. (2013). Design, imple-
mentation and simulation of an experimental multi-
camera imaging system for terrestrial and multi-
purpose mobile mapping platforms: A case study. Ap-
plied Mechanics and Materials, Trans Tech Publica-
tions, Selected papers from the International Confer-
ence on Optimization of the Robots, 332:139–144.
Maslekar, N. (2011). Adaptative traffic signal control sys-
tem based on inter-vehicular communication. Ph.D.
thesis, University of Rouen, Esigelec School of Engi-
neering.
Whaiduzzaman, M., Sookhak, M., Gani, A., and Buyya, R.
(2014). A survey on vehicular cloud computing. Jour-
nal of Network and Computer Applications, 40:325–
344.
Yu, R., Zhang, Y., Gjessing, S., Xia, W., and Yang, K.
(2013). Toward cloud-based vehicular networks with
efficient resource management. In IEEE Network,
pages 48–55.
Design,ImplementationandSimulationofanExperimentalProcessingArchitectureforEnhancingReal-timeVideo
ServicesbyCombiningVANET,CloudComputingSystemandOnboardNavigationSystem
179
