
Evaluation of a Fault-tolerant WSN Routing Algorithm Based on Link
Quality
Unai Burgos, Iratxe Soraluze and Alberto Lafuente
Department of Computer Architecture and Technology, University of the Basque Country UPV/EHU
20018 San Sebasti
´
an, Spain
Keywords:
Wireless Sensor Networks, Routing, Fault Tolerance.
Abstract:
In this paper we propose a fault-tolerant routing algorithm for WSN. Our approach is based on link quality as
the main criteria to build an initial routing tree, although additional criteria, such as node reachability and path
diversity, are also considered. The routing tree is built using only local information (two-hop neighbourhood).
This information is also used to reconfigure locally the routing tree when a fault is detected. The routing
algorithm has been implemented using the OMNeT++ simulator and a preliminary performance evaluation
has been carried out. Results show that our algorithm reach comparable delivery rates than a standard flooding
algorithm, being much more efficient.
1 INTRODUCTION
Wireless Sensor Networks, WSN, are a promising
technology that have been used successfully for envi-
ronment monitoring, health care applications, trans-
portation, ubiquitous home networks and others.
WSN consist of one or more sinks and a huge num-
ber of small devices, called motes, with sensors, wire-
less communication and small computation capabil-
ity. Sensors are used to gather information to be sent
to a sink node. The sink node is used to process the
received data and to connect the wireless sensor net-
work with the Internet. The sink node is usually a
more powerful device with no practical limitations.
Note that current technology enables the implementa-
tion of the sink on a mobile device.
As motes are small, work unattended in the real
world, and are powered with very limited batteries,
energy constraints are usually severe and affect all the
aspects in the system design. Therefore, instead of
relaying on brute-force message forwarding (flood-
ing), communication protocols should be designed
carefully in order to trade-off transmission power and
message retransmissions and forwarding. Reducing
transmission power, which increases energy waste
quadratically with respect to signal range, results in
more message loses and more hops to reach the sink
node. Furthermore, in the search of the optimality, it
should be also taken into account that message loses
also depends on phenomena as interferences and mul-
tipath fading (Doherty et al., 2012). Finally, a node
can crash, due to battery exhaustion or many other
reasons.
Therefore, a WSN needs an efficient routing pro-
tocol and a fault management mechanism that reacts
by reconfiguring the network upon failures and en-
sure a sufficient quality of service (Yu et al., 2007). A
good solution should provide reliable and fault toler-
ant communication, scalability, low latency and quick
reconfiguration with minimum energy consumption.
To face failures in routing paths, two general ap-
proaches are used, namely replication and retransmis-
sion (Alwan and Agarwal, 2009). The most common
replication mechanisms consist on transmitting mul-
tiple copies of the same data to the sink over multiple
paths (Ye et al., 2005). Note that when the same data
packet is sent along two fully node-disjointed paths
the packet delivery ratio is almost doubled (Tian and
Georganas, 2003). However, the transmission of mul-
tiple copies increases the energy consumption, and
the extra work to construct and maintain disjoint paths
introduces control message overhead and a lack of
scalability (Challal et al., 2011). On the other hand,
in retransmission techniques usually only one path is
used between the source node and the sink. As a
consequence, a broken path needs to be partially re-
constructed or completely discarded. Also in this ap-
proach network traffic and hence energy consumption
increase due to end-to-end retransmissions.
Hop-by-hop recovery seems to be more reliable
97
Burgos U., Soraluze I. and Lafuente A..
Evaluation of a Fault-tolerant WSN Routing Algorithm Based on Link Quality.
DOI: 10.5220/0005330300970102
In Proceedings of the 4th International Conference on Sensor Networks (SENSORNETS-2015), pages 97-102
ISBN: 978-989-758-086-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

than end-to-end recovery (Kim, 2004). These rout-
ing algorithms consider a partial reconstruction of the
routing path due to a link or node failure. The main
benefit is that failure detection is managed locally by
the nodes without global exchange of information, a
key issue in order to avoid messages.
Some of the fault-tolerant routing algorithms pro-
posed in the literature consider only crash node fail-
ures and permanent link failures, i.e., once a failure
is detected the node is considered dead (Boukerche
et al., 2006) (ALMomani et al., 2011). In (Bouk-
erche et al., 2006) just one path is used for transmit-
ting data and node failures are handled by a retrans-
mission mechanism. If a sender does not receive an
ack message from the receiver node in a predefined
timeout, the routing path is partially changed and the
packet is retransmitted using the new links in the path.
In this solution, flooding is used to construct an initial
cost field, as well as for node subscription. In (AL-
Momani et al., 2011) the routing path reconstruction
starts in a node that detects that its energy level is be-
low a specific threshold, and therefore it is going to
dead.
Nevertheless, the permanent failure assumption is
not realistic in many scenarios where link failures
or message looses in WSN are commonly due to
transient situations like temporal obstacles or inter-
ferences. In these cases enabling temporal alterna-
tive paths is an approach usually found in the liter-
ature (Nelakuditi et al., 2007) (Tian and Georganas,
2003).
Most of the routing protocols used for WSN are
reactive (Al-Karaki and Kamal, 2004), i.e., the routes
are built on demand after a flooding started on the sink
node. Apart from the cost associated to the flooding
and a high latency of the reconstruction of paths when
failures occur, a drawback of this approach is that it
does not manage efficiently the mobility of the sink
node, because the routing path is built with the sink
as root. In consecuence, it is convenient to design a
proactive routing algorithm as in (Heinzelman et al.,
2000) when the sink can move.
In the present work we assume that failures are
transient. Besides we consider that a link can be
characterized by a feature that we call the quality of
the link. Our aim is to select the most reliable links
to form a routing tree in order to reduce the num-
ber of retransmissions that would cause a further in-
crease in channel contention and more packet losses
(Li et al., 2005) (Yousefi et al., 2009) (Zhang et al.,
2007), as well as a decrease in the message delivery
rate (Zhang et al., 2007). System reconstruction is
carried out locally in the neighbourhood of the fault,
in order to finally reduce the energy consumption.
In this paper we describe a routing algorithm
based on link quality as the main criteria, as well
as a preliminary performance evaluation. Our strat-
egy is based on the construction of a routing tree in a
proactive manner. Besides link quality, we use addi-
tional criteria, such as node reachability and diversity
(Boettcher et al., 2003). The routing tree is built us-
ing only local information (two-hop neighbourhood).
This information is also used to reconfigure the rout-
ing tree when a fault is detected.
Although, performance on sink mobility scenar-
ios has not been evaluated in the scope of the present
work, our routing algorithm has been designed to be
flexible enough to efficiently manage the dynamism
associated to sink mobility. In our protocol, if the sink
moves, only the routing information of a small area in
the neighbourhood of the sink needs to be updated.
2 ROUTING ALGORITHM
BASED ON LINK QUALITY
We will divide the description of our routing algo-
rithm in two parts. In the first one we describe how an
initial routing tree is built after a node and link qual-
ity discovery period. In the second one, we describe
how the routing of data to the sink starts and how the
routing tree will be reconfigured due to link or node
failures.
The WSN architecture we consider consists of
a finite (but unbounded) set of resource-constrained
static sensor nodes, which we will denote by
p
1
, p
2
, . . . , p
i
, . . . (or by p, q, . . . for short), and one
more powerful sink node. We model this distributed
system as a set V of n nodes. A node p communicates
directly only with a subset N
p
of nodes of V, the nodes
in its communication range. The nodes in N
p
are con-
nected with p by a bidirectional communication link.
All the sensor nodes transmit with the same power
level and henceforth all they have the same transmis-
sion range.
Concerning timing assumptions, we consider a
synchronous model in which there are bounds on
message transmission times. Message transmission
time bounds can be estimated using application pa-
rameters such as transmission latency between neigh-
bor nodes. We assume that every node has a local
clock that can measure real-time intervals.
We consider that nodes can fail either by perma-
nently crashing (sensor nodes that fail do not recover)
or by omitting messages. Omission failures may oc-
cur either while sending or while receiving messages,
and these failures can be transient (a node may tem-
porarily omit messages and later on reliably deliver
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
98

messages again), or permanent. At the same time, we
assume lossy links, i.e., messages can be lost tem-
porarily or permanently during its transmission in a
link. Henceforth nodes that have permanent message
omissions in all their outgoing links will be consid-
ered as crashed nodes. We also assume that there is
a maximum number of crash failures and permanent
omission failures in the system in such a way that the
system do not get partitioned. We assume that all the
nodes of the system that do not crash are able to re-
ceive and send messages along a path of lossy links
from every non-crashed nodes.
2.1 Building the Routing Tree
First of all, there is a discovery phase where each node
p sends periodical heartbeat messages during a period
of time in order to discover the nodes that are in its
transmission range, i.e., the subset N
p
⊂ V . In this
phase also the link quality for all the links is gath-
ered. Global knowledge about link quality is relevant
to build optimal routing paths, however, due to the
severe constrains in wireless sensor networks, broad-
casting link quality information to the whole network
is out of any practical consideration. In this algorithm
each node sets the link quality of nodes that are up to
two hop distance. A node p gathers the link quality
for all the nodes in N
p
and N
q
for all q ∈ N
p
, us-
ing neighbour information piggybacked on heartbeat
messages. We call N
2
p
to this set of nodes. Also some
other topological properties of the network such as
the reachability and diversity (Boettcher et al., 2003)
of each node are calculated.
We provide here a more formal description of the
properties:
• Link Quality
For any bidirectional link (p, q) = (q, p) between
nodes p and q, we represent the quality of link
(p, q) as W
pq
. The value of W
pq
is assigned on the
basis of the number of lost messages in the link
(p, q), as we explain next. Observe that, since we
are considering synchronous links, a message lose
can be detected at the receiving node by the time-
out expiration of a periodical message. Assume a
link (p, q) where p has sent M
p→q
messages and
q has sent M
q→p
messages. Assume that process
p has detected that l
q→p
messages from q have
been lost in the link (p, q), and that q has detected
that l
p→q
messages from p have been lost in the
link (p, q). Since we are considering bidirectional
communication, the quality of the link will be de-
termined by the most lossy direction of the link,
and it is represented by a real number in the range
(0, 1):
W
pq
= 1 − max(
l
q→p
M
p→q
,
l
q→p
M
q→p
) (1)
• Reachability
The reachability property measures a brute-force
aspect of connectivity power of a node p. Con-
sider a node q such that p ∈ N
q
. We define the
reachability set of p from q, R
p
(q) as the nodes
connected to p that are not directly connected to
q. Henceforth,
|
R
p
(q)
|
provides a measure of
the reachability of p. In our example of Fig-
ure 1, observe that R
p
1
(p
0
) = {p
3
} and R
p
2
(p
0
) =
{p
3
, p
4
}, thus
|
R
p
1
(p
0
)
|
= 1 and
|
R
p
2
(p
0
)
|
= 2,
which represents the fact that p
2
provides higher
reachability from p
0
than p
1
. The goal of consid-
ering this measure is to reduce the number of hops
of the routing tree.
• Diversity
Diversity refers to a much more subtle role of a
node p as a router in the network: the power of p
for reaching nodes that can not be reached from
other nodes. Note that diversity can be calculated
upon the information about the reachability sets
in a neighbourhood. In our example, p
3
and p
5
provides the highest possible value for diversity,
as both nodes are essential to maintain the graph
connected.
Figure 1: Collected data after information-gathering phase.
Once the information obtained about the quality
of links is statistically relevant, the construction of the
routing tree starts proactively. To proceed, an initial
EvaluationofaFault-tolerantWSNRoutingAlgorithmBasedonLinkQuality
99

decision is to identify a root node for the tree. Di-
verse criteria could be applied to select the root node,
depending on parameters such as network size, sink
location or sink mobility. In the case of static sink
node, as we are considering, the root of the tree will
be the sink node.
The root node is in charge of starting the tree con-
struction. Node p will select as its sons enough nodes
to reach all the nodes at two hop distance. Note that
diversity is necessarily the first criteria to select some
of the son nodes. After that, p will select first the
nodes with the best link quality and, among the nodes
with similar link quality, the nodes with the highest
reachability. This procedure is repeated by each of
the son nodes of p and propagated to the whole sys-
tem. Nodes with low reachability, diversity and qual-
ity of links will remain as leaf nodes in the tree and
henceforth will not participate in routing tasks.
In our example of Figure 1, p
0
is the root node
and N
2
p
= {p
0
, p
1
, p
2
, p
3
, p
4
}. Observe that, based on
the criteria of link quality, node p
0
will chose p
1
as
its son node instead p
2
, in spite of the higher reacha-
bility provided by the latter. Figure 1 shows this de-
cision and the configurations of the reachability sets.
Observe also in the figure that p
3
is a better candi-
date than p
2
to be son node of p
1
because p
3
, despite
linked with a lower-quality link, has better diversity
(in fact p
3
is necessary to connect p
5
).
2.2 Routing and Managing Failures
In this section we describe the behaviour of the rout-
ing algortihm once the routing tree has been built.
To manage failures once the tree has been built,
the periodical heartbeat messages continue being sent
across the links that belong to the routing tree. The
only difference is that in this case the timers are set
depending on the link quality. Whenever a timer for
a heartbeat message of a link expires, it means that a
link failure has occurred. This failure might be tran-
sient, due to temporal interferences or obstacles, or
might be permanent due to a node crash. Note that
whether the message is omitted by a node or lost in the
channel is indistinguishable from the receiver point of
view. Anyway, whenever a message lose is detected
by q in a transmission from p to q, W
pq
is updated,
and the link (p, q) is removed from the tree and re-
placed immediately to form an alternative route. This
decision is based on the fact that, although next mes-
sages sent from p to q could be received by q, in the
most common failure patterns, the probability of hav-
ing a sequence of losses is high. The same link (p, q)
could be part of the tree later on if the message lose
pattern of the link is benign and a failure occur in the
new links chosen for the tree. However, if the (p, q)
link failure is permanent, i.e, p has crashed, the W
pq
link quality measure will decrease progressively, and
eventually link (p, q) will not belong to the tree any
more. To find an alternative route when q detects a
failure in a link (p, q), only 2-hop local information
is needed. The criteria used to select the new link or
links are the same as the used to build the tree: link
quality, reachability and diversity. If p is a son of q,
q will replace p with some other son node(s). Other-
wise, if p is a parent of q, q will start a specific inverse
reconstruction mechanism to find a new parent within
a two-hop distance.
Besides, to avoid crashes due to battery depletion,
when the battery level of a node goes beyond a tressh-
old, it results in a programmed decreasing of the node
functionality. Specifically, p will not be used as a
router so far, and consequently p should be excluded
of the routing tree by assigning a null value to the
quality of p’s links, i.e., W
pq
= 0 for all node q node p
is connected to. We call this mode routing-off mode.
Note that, as a consequence of that, if some (p, q) was
in the routing tree, then the routing tree should be re-
constructed. Of course, in routing-off mode, p’s links
can still be used to communicate application mes-
sages, i.e., those generated by p as a source node in
the WSN.
3 ALGORITHM SIMULATION
AND EVALUATION
In order to carry out a preliminary evaluation, we have
implemented our routing algorithm using the OM-
NeT++ simulator with the MiXiM framework.
We focus the evaluation on the folowing parame-
ters:
• Start-up time: time that our protocol needs to
build the routing tree after the information gath-
ering phase.
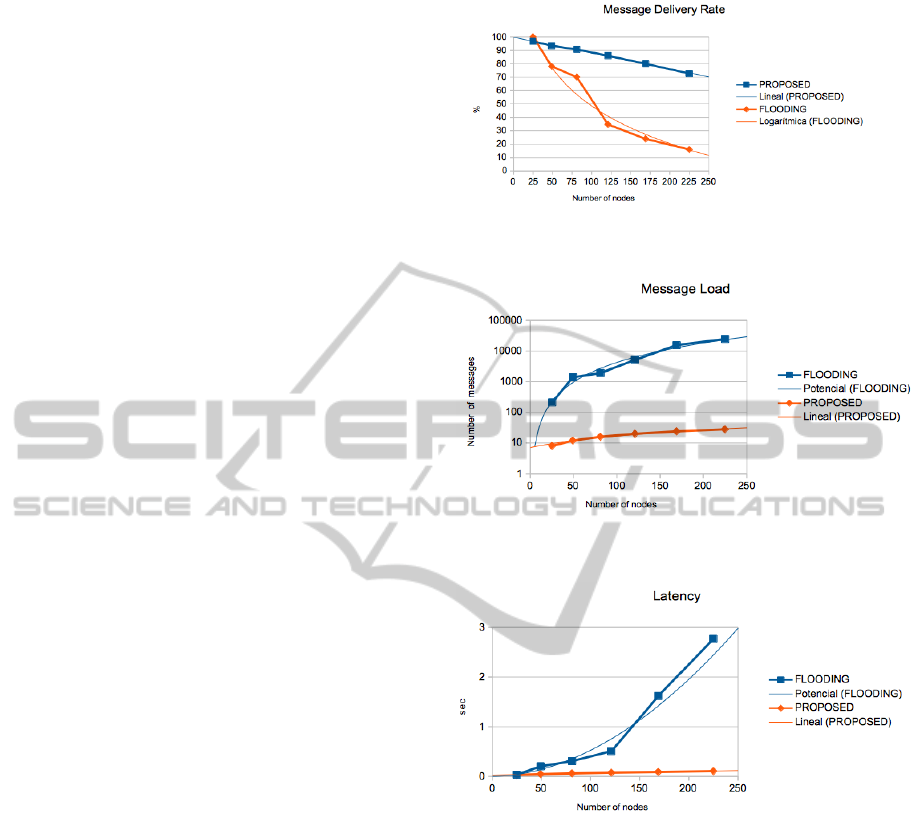
• Message delivery rate: the percentage of mes-
sages that are delivered to the sink node among
the messages sent from the source nodes.
• Message load: number of messages created in
the network for each message created in a source
node. This also provides an estimation of energy
consumption.
• Latency: average time the messages created in a
source node need to be delivered to the sink node.
In order to provide a basis for the evaluation we
compare our algorithm to a basic flooding algorithm.
A flooding algorithm works inefficiently in its goal to
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
100
obtain high delivery rates and low latencies and de-
lays. Henceforth, the goal of any well-designed tree-
construction algorithm should be to provide a routing
quality comparable to flooding while improving effi-
ciency parameters. Note also that a simple flooding
algorithm does not require any initial configuration
effort.
We have carried out three different experiments.
For each one of them we have measured the afore-
mentioned performance parameters in order to com-
pare our algorithm to the standard flooding algorithm:
• Scalability. We study the performance of the sys-
tem for 25, 49, 81, 121, 169 and 225 nodes.
• Root location. Two possibilities are considered:
at a corner of the grid network and in the middle
of the network.
• The influence of link quality. We analyze the per-
formance of the algorithms for four different sce-
narios with different message lose probabilities.
To evaluate the performance, we consider that
there is only one source node that sends 30 data mes-
sages to the sink, one message every 0.2 seconds.
This source node is located as far as possible from
the sink node. We consider a node layout on a grid
and a transmission range in the same order than the
distance between nodes. Instead of relaying on the
failures induced by the simulator, we generate chan-
nel failures with a lose probability of 0.01. Finally, to
get a fair comparison with the flooding algorithm, we
have used an implementation of our algorithm with-
out retransmissions.
3.1 Evaluation Results
In this subsection we summarized the result obtained
from the experiments.
3.1.1 Scalability
We have obtained that for our algorithm start-up times
increase linearly with the size of the network, from 2
seconds for 25 nodes to 6 seconds for 225 nodes.
Ours algorithm outperforms the flooding algo-
rithm regarding message delivery, message load and
latency, as shown in Figure 2, Figure 3 and Figure 4
respectively.
3.1.2 Root Location
We have obtained that start-up times of our algorithm
do not depend significantly on the location of the sink.
Regarding the rest of the performance parameters, in
general a centered location is beneficial. Specifically,
Figure 2: Proposed algorithm versus flooding algorithm re-
garding message delivery rate.
Figure 3: Proposed algorithm versus flooding algorithm re-
garding message load.
Figure 4: Proposed algorithm versus flooding algorithm re-
garding latency.
the latency is reduced to less than one half when the
sink is located in the middle of the network with re-
spect to a corner location.
3.1.3 The Influence of Link Quality
We generate different link qualities based on the dis-
tance between nodes and the transmission range. We
have evaluated our algorithm and the flooding algo-
rithm with base link lose probabilities of 0.01, 0.1 and
0.2 which increases quadratically with the distance
between nodes.
We have obtained that start-up times, latencies
and message loads do not depend significantly on the
link quality. On the contrary, message delivery rates
in both algorithms are significantly affected by link
EvaluationofaFault-tolerantWSNRoutingAlgorithmBasedonLinkQuality
101

quality. Specifically, in our algorithm we have ob-
tained that message delivery rate decreases linearly
from near 90% to 65% as base lose probability in-
creases from 0.01 to 0.2.
4 DISCUSSION
As we have seen, our algorithm outperforms the ref-
erence flooding algorithm in every evaluation crite-
ria. These results are as expected, since we have com-
pared our algorithm to a force-brute algorithm with
no optimization. A flooding algorithm should be very
good in message delivery rate. However, when data
generation rates are high, as it is the case of our ex-
periments, the fowarding of messages results in a net-
work collapse and the message delivery rate (and pos-
sibly latencies) drop.
On the other hand, an algorithm as the proposed in
this paper will optimize the network traffic (and other
parameters, as battery waste). The results we have
obtained confirm this fact.
Currently we are carrying out more experimenta-
tion in order to (a) determine the key parameters to
be tuned in order to improve the performance of our
algorithm, and (b) compare our algorithm to similar
approaches, as the RPL (Winter et al., 2012) algo-
rithm.
REFERENCES
Al-Karaki, J. and Kamal, A. (2004). Routing techniques in
wireless sensor networks: a survey. Wireless Commu-
nications, IEEE, 11(6):6–28.
ALMomani, I., Saadeh, M., AL-AKhras, M., and AL-
Jawawdeh, H. (2011). A tree-based power saving
routing protocol for wireless sensor networks. Inter-
national Journal of Computers and Communications,
5(2):84–92.
Alwan, H. and Agarwal, A. (2009). A survey on fault toler-
ant routing techniques in wireless sensor networks. In
Proceedings of the 2009 Third International Confer-
ence on Sensor Technologies and Applications, SEN-
SORCOMM ’09, pages 366–371, Washington, DC,
USA. IEEE Computer Society.
Boettcher, P., Coffin, D., Czerwinski, R., Kurian, K., and
Nischan., M. (2003). Declarative routing protocol
documentation. In Project report.
Boukerche, A., Pazzi, R. W. N., and Araujo, R. B. (2006).
Fault-tolerant wireless sensor network routing proto-
cols for the supervision of context-aware physical en-
vironments. Journal of Parallel and Distributed Com-
puting.
Challal, Y., Ouadjaout, A., Lasla, N., Bagaa, M., and Had-
jidj, A. (2011). Secure and efficient disjoint multipath
construction for fault tolerant routing in wireless sen-
sor networks. Journal of Network and Computer Ap-
plications, 34(4):1380 – 1397. Advanced Topics in
Cloud Computing.
Doherty, L., Simon, J., and Watteyne, T. (2012). Wireless
sensor network challenges and solutions. Microwave
Journal, (Agosto):22–34.
Heinzelman, W., Chandrakasan, A., and Balakrishnan, H.
(2000). Energy-efficient communication protocol for
wireless microsensor networks. In System Sciences,
2000. Proceedings of the 33rd Annual Hawaii Inter-
national Conference on, pages 10 pp. vol.2–.
Kim, S. (2004). Reliable transfer on wireless sensor net-
works. In In SECON, pages 449–459.
Li, Y., Chen, J., Lin, R., and Wang, Z. (2005). A reli-
able routing protocol design for wireless sensor net-
works. In Mobile Adhoc and Sensor Systems Confer-
ence, 2005. IEEE International Conference on, pages
4 pp.–61.
Nelakuditi, S., Lee, S., Yu, Y., Zhang, Z.-L., and Chuah, C.-
N. (2007). Fast local rerouting for handling transient
link failures. IEEE/ACM Trans. Netw., 15(2):359–
372.
Tian, D. and Georganas, N. D. (2003). Energy efficient
routing with guaranteed delivery in wireless sensor
networks. In Wireless Communications and Network-
ing, 2003. WCNC 2003. 2003 IEEE, volume 3, pages
1923–1929 vol.3.
Winter, T., Thubert, P., Brandt, A., Hui, J., Kelsey, R.,
Levis, P., Pister, K., Struik, R., Vasseur, J., and
Alexander, R. (2012). RPL: IPv6 Routing Protocol
for Low-Power and Lossy Networks. RFC 6550 (Pro-
posed Standard).
Ye, F., Zhong, G., Lu, S., and Zhang, L. (2005). Gradi-
ent broadcast: a robust data delivery protocol for large
scale sensor networks. Wirel. Netw., 11(3):285–298.
Yousefi, H., Dabirmoghaddam, A., Mizanian, K., and Ja-
hangir, A. (2009). Score based reliable routing in
wireless sensor networks. In Information Network-
ing, 2009. ICOIN 2009. International Conference on,
pages 1–5.
Yu, M., Mokhtar, H., and Merabti, M. (2007). Fault man-
agement in wireless sensor networks. Wireless Com-
munications, IEEE, 14(6):13 –19.
Zhang, H., Arora, A., ri Choi, Y., and Gouda, M. G. (2007).
Reliable bursty convergecast in wireless sensor net-
works. Computer Communications, 30(13):2560 –
2576. Sensor-Actuated Networks SANETs.
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
102
