
A Real-time Scheduling of Reconfigurable OS Tasks with a Bottom-up
SPL Design Approach
Hamza Gharsellaoui
1,2
, Jihen Maazoun
3
, Nadia Bouassida
3
, Samir Ben Ahmed
1,4
and Hanene Ben-Abdallah
5
1
LISI-INSAT Laboratory, Carthage University, Carthage, Tunisia
2
Al-Jouf College of Technology, TVTC, Al Jouf, Kingdom of Saudi Arabia
3
Mir@cl Laboratory, Sfax University, Sfax, Tunisia
4
FMPNS, Tunis El Manar University, Tunis, Tunisia
5
FCIT, King Abdulaziz University, Jeddah, Kingdom of Saudi Arabia
Keywords:
Real-time Scheduling, Reconfigurable Embedded Systems, SPL Design, UML Marte.
Abstract:
Several real-time embedded system must be dynamically reconfigured to account for hardware/software faults
and/or maintain acceptable performances. Depending on the run-time environment, some reconfigurations
might be unfeasible,i.e., they violate some real-time constraints of the system. In this paper, we deal with the
development of dynamically reconfigurable embedded systems in terms of the production of execution sched-
ules of system tasks (feasible configuration) under hard real-time constraints. More specifically, we propose an
approach that starts from a set of reconfigurations to construct a Software Product Line that can be reused in a
predictive and organized way to derive real-time embedded systems. To make sure that the SPL offers various
feasible reconfigurations, we define an intelligent agent that automatically checks the system’s feasibility after
a reconfiguration scenario is applied on a multiprocessor embedded system. This agent dynamically deter-
mines precious technical solutions to define a new product whenever a reconfiguration is unfeasible. The set
of products thus defined by the agent can then be unified into an SPL. The originality of our approach is its
capacity to extract, from the unfeasible configurations of an embedded system, an SPL design enriched with
real-time constraints and modeled with a UML Marte profile. The SPL design can assist in the comprehen-
sion, reconfiguration as well as evolution of the SPL in order to satisfy real-time requirements and to obtain a
feasible system under normal and overload conditions.
1 INTRODUCTION
The ubiquity of portable computerized systems has
diversified the application domains of embedded,
real-time systems. This diversity is accompanied
by an increasing number of new, complex deployed
software whose development still faces several chal-
lenges. On the one hand, most available software
development models do not take into account the
specifics of embedded systems, e.g., hard timing con-
straints, limited memory and power use, predefined
hardware platform technology, and hardware costs.
On the other hand, the new generations of this system
type are imposing new criteria, e.g., run-time flexi-
bility and agility (Gharsellaoui et al., 2012). These
challenges call for appropriate tools and methodolo-
gies for embedded software engineering and dynami-
cally reconfigurable embedded control systems as an
independent discipline. In this work, we aim to pro-
vide for the development of these systems through
predictive and organized reuse. More specifically, we
propose an approach to construct Software Product
Lines (SPL) that can be reused for the development
of dynamically reconfigurable, embedded, real-time
systems.
In this paper, we examine the development of re-
configurable, embedded real-time systems in terms of
scheduling their tasks so as to meet a set of timing
constraints. As such, we consider an embedded sys-
tem as a set of n real-time tasks that must be sched-
uled. Thus, the general development goal is to ensure
that any reconfiguration scenario ψ
h
that changes the
system implementation does not violate its real-time
constraints; that is, the system is feasible and meets
its real-time constraints even if its implementation is
changed after a reconfiguration scenario.
169
Gharsellaoui H., Maazoun J., Bouassida N., Ben Ahmed S. and Ben-Abdallah H..
A Real-time Scheduling of Reconfigurable OS Tasks with a Bottom-up SPL Design Approach.
DOI: 10.5220/0005342501690176
In Proceedings of the 10th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE-2015), pages 169-176
ISBN: 978-989-758-100-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

To meet this development goal, we propose an ap-
proach that starts from a set of unfeasible reconfigu-
rations to construct a Software Product Line that can
be reused in a predictive and organized way to recon-
figure a system to as to meet its timing constraints.
To make sure that the SPL offers only various fea-
sible reconfigurations, we define an intelligent agent
that automatically checks the system’s feasibility af-
ter a reconfigurationscenario is applied on a multipro-
cessor embedded system. This agent dynamically de-
termines precious technical solutions to define a new
product whenevera reconfiguration is unfeasible. The
set of reconfigurations thus defined by the agent can
then be unified into an SPL. The originality of our ap-
proach is its capacity to extract, from the unfeasible
configurations of an embedded system, an SPL de-
sign enriched with real-time constraints and modeled
with a UML Marte profile. The SPL design can assist
in the comprehension, reconfiguration as well as evo-
lution of the SPL in order to satisfy real-time require-
ments and to obtain a feasible system under normal
and overload conditions.
The proposed approach adapts the bottom-up SPL
construction method proposed in (Maazoun et al.,
2013) for software products. In the original method,
an SPL is constructed from variant products’ source
code; it models a family of product solutions that can
used to derive new products in the SPL domain. The
variability is represented through features (defined as
an end user, visible system characteristic (Kang et al.,
1990)) that are related with constrained relationships
to guide their reuse. Compared to existing SPL meth-
ods (cf., (Ziadi, 2004), (Ziadi et al., 2012), (She et al.,
2011), (Al-Msie’Deen et al., 2012)), the method of
(Maazoun et al., 2013) has the merit of producing
all mandatory and variable features along with all the
constraints (and, or, require, etc) relating them. In
our adaptation of this method, the SPL construction
starts from the tasks’ variable parameters of the failed
(unfeasible) system, which we consider as a feature.
It produces an SPL representing a set of feasible re-
configurations. To model the SPL, we use extend the
SPL-UML profile (Maazoun et al., 2013) with timing
constraints as proposed in the UML Marte profile; we
call the resulting profile SPL-UML-Marte.
The remainder of the paper is organized as fol-
lows. In Section 2, we overview work pertinent to
scheduling with a focus on our optimal scheduling
algorithm which is used for the reconfiguration con-
struction. Section 3 presents the SPL-UML Marte
as a profile for software product lines. Section 4
presents the SPL construction approach which pro-
duces a set of feasible reconfigurations from unfeasi-
ble ones. Section 5 summarizes the main results and
outlines their intended future extensions.
2 RELATED WORK
As discussed in the introduction, our approach tackles
the development of reconfigurable, embedded real-
time systems in terms of task scheduling. In our
approach, a reconfiguration scenario entails the con-
struction of a new SPL starting from the current (spo-
radic/periodic) tasks’ parameters. A sporadic task
is described by a minimum inter-arrival time P
p,ψ
h
i
which is assumed to be equal to its relative deadline
D
p,ψ
h
i
, and a worst-case execution time (WCET)C
p,ψ
h
i
for each reconfiguration scenario ψ
h
and on each pro-
cessor p. Indeed, a hard real-time system typically
has a mixture of off-line and on-line workloads and
assumed to be feasible before any reconfigurationsce-
nario ψ
h
. According to (Brocal et al., 2011), a hy-
perperiod is defined as HP = [ζ, 2∗ LCM + ζ], where
LCM is the well-known Least Common Multiple of
the tasks periods and ζ is the largest task offset. This
algorithm, in our original paper assumes that sporadic
tasks span no more than one hyperperiod of the pe-
riodic tasks for each reconfiguration scenario ψ
h
on
each processor p.
In this section, we first present works dealing with
reconfigurations and real-time scheduling of embed-
ded systems. Second, we illustrate the scheduling al-
gorithm we adopted in the proposed SPL construc-
tion approach. In recent works, many real-time sys-
tems rely on the EDF scheduling algorithm in the case
of uniprocessor scheduling theory. This algorithm
has been shown to be optimal under many different
conditions. For example, for independent, preemp-
tive tasks, on a uni-processor, EDF is optimal in the
sense that if any algorithm can find a schedule where
all tasks meet their deadlines, then EDF can meet the
deadlines (Dertouzos, 1974).
To address demands for increasing processor
performance, silicon vendors no longer concentrate
wholly on the miniaturization needed to increase pro-
cessor clock speeds, as this approach has led to prob-
lems with both high power consumption and exces-
sive heat dissipation. Instead, there is now an increas-
ing trend towards using multiprocessor platforms for
high-end real-time applications (Brocal et al., 2011).
For these reasons, we will use in our work the
case of real-time scheduling on homogeneous multi-
processor platforms. Before presenting our original
contribution, we will present some definitions below.
According to (Gharsellaoui et al., 2012), each peri-
odic task is described by an initial offset a
i
(activation
time), a worst-case execution time (WCET) C
i
, a rel-
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
170

ative deadline D
i
and a period T
i
.
According to (Buttazzo and Stankovic, 1993),
each sporadic task is described by minimum inter-
arrival time P
i
which is assumed to be equal to its
relative deadline D
i
, and a worst-case execution time
(WCET) C
i
. Hence, a sporadic task set will be de-
noted as follows: Sys
2
= {σ
i
(C
i
, D
i
); i = 1 to m}.
Reconfiguration policies in the current paper are clas-
sically distinguished into two strategies: static and
dynamic reconfigurations. Static reconfigurations are
applied off-line to modify the assumed system before
any system cold start, whereas dynamic reconfigura-
tions are dynamically applied at run-time, which can
be further divided into two cases: manual reconfig-
urations applied by users and automatic reconfigura-
tions applied by intelligent agents (Gharsellaoui et al.,
2012). This paper focuses on the dynamic reconfig-
urations of assumed mixture of off-line and on-line
workloads that should meet deadlines defined accord-
ing to user requirements. The extension of the pro-
posed algorithm should be straightforward when this
assumption does not hold.
Running Example
In this section, we illustrate the performance of our
proposed approach for both periodic synchronous
and asynchronous tasks, and sporadic tasks. The
simulation was conducted on our tool RT-SPL-
Reconfig and proven by the real-time simulator
Cheddar (Legrand and Singhoff, 2004) with a task set
composed of old tasks (ξ
old
) and new tasks (ξ
p,ψ
h
new
)
on the processor p for each reconfiguration scenario
ψ
h
. We illustrate with a simplified example to ease
the understanding of our approach. The task set
considered for this example is given in table 1 and
is composed of 10 tasks. The sum of utilization of
all tasks is equal to 426.1%. We have 3 identical
processors in our system to schedule these tasks. In
this case, we assume that each task’s deadline is less
than or equal to its period. The worst case execution
times, deadlines, and the time periods of all tasks are
generated randomly. This algorithm, in our original
paper assumes that sporadic tasks span no more than
one hyperperiod of the periodic tasks HP
(p,ψ
h
)
=
[ζ
(p,ψ
h
)
, 2*LCM + ζ
(p,ψ
h
)
], where LCM
p,ψ
h
is the
well-known Least Common Multiple of tasks periods
and (ζ
p,ψ
h
) is the largest task offset of all tasks
τ
p,ψ
h
k
for each reconfiguration scenario ψ
h
on each
processor p. Also, in this experiment, our task set
example is initially implemented by 5 characterized
old tasks (ξ
old
= {τ
1
; τ
2
; τ
3
; τ
4
; τ
5
}). These tasks
are feasible because the processor utilization factor
U = 1.19 ≤ 3. These tasks should meet all required
deadlines defined in user requirements and we have
Feasibility(Current
ξ
old
(t)) ≡ True.
Firstly, tasks are partitioned; task τ
1
is partitioned on
first processor, τ
2
and τ
3
are partitioned on processor
2 while task τ
4
and τ
5
are partitioned on processor
3. We have three sets of local tasks. As there is only
one task on first processor then task τ
1
utilization
factor is the same as the first processor 1 utilization
factor ( u
1,0
= 0.285 ≤ 1) while utilization factors of
processor 2 and processor 3 are calculated as follows:
U
2,0
=
∑
(2)
2
i=1
C
2
i
T
2
i
= 0.372 < 1,
U
3,0
=
∑
(2)
3
i=1
C
3
i
T
3
i
= 0.533 < 1,
We suppose that a first reconfiguration scenario
ψ
1
(h = 1) is applied at time t
1
to add 5 new
tasks ξ
ψ
1
new
= {τ
6
; τ
7
; τ
8
; τ
9
; τ
10
}. The new pro-
cessor utilization becomes U
ψ
1
= 4.261 > 3
time units. Therefore the system is unfeasible.
Feasibility(Current
ψ
1
ξ
(t1)) ≡ False. Indeed, if the
number of tasks increases, then the overload of the
system increases too. Our optimal earliest deadline
Table 1: Task Parameters.
Task C
i
D
i
T
i
= P
∗
i
τ
1
2 9 7
τ
2
3 21 20
τ
3
2 9 9
τ
4
2 13 10
τ
5
3 15 9
τ
6
14 21 19
τ
7
10 24 16
τ
8
8 18 18
τ
9
13 16 17
τ
10
5 11 12
first (OEDF) algorithm is based on the following
Guarantee Algorithm which is presented by Buttazzo
and Stankovic in (Buttazzo and Stankovic, 1993).
Indeed, OEDF algorithm is an extended and im-
proved version of Guarantee Algorithm that usually
guarantees the system’s feasibility.
3 SPL-UML MARTE: A PROFILE
FOR REAL-TIME SYSTEMS
SPL
To model the constructed SPL for a real-time em-
bedded system, we propose the UML Marte profile
named SPL-UML Marte.
AReal-timeSchedulingofReconfigurableOSTaskswithaBottom-upSPLDesignApproach
171

3.1 Extensions for Class Diagrams
In the context of SPL, the intelligent agent (IA) of
our SPL construction method proposes to introduce
different types of variability that are modeled using
the following stereotypes:
• <<optional>> specifies optionality of a class,
package, attribute or operation.
• <<recommended>> denotes recommendation
of classes only.
• <<mandatory>> indicates obligatory classes,
packages, attributes or operations.
• <<mandatory
association>> specifies obliga-
tory relation between classes. It is represented by
a bold line.
• <<optional
association>> specifies optional re-
lation between classes. It is represented by dashed
line.
• <<Xor association>> indicates an alternative
relation between classes.
• <<Feature
Name>> specifies in which feature
the tagged element (class, package, attribute or
operation) is present.
3.2 Extensions for Sequence Diagrams
In our profile, the UML Marte sequence diagram is
extended with the following stereotypes:
• <<optional>> denotes optional objects, actors
or operations.
• <<mandatory>> specifies obligatory objects,
actors or operations.
• <<mandatory
relation>> marks obligatory rela-
tions between objects, actors. It is represented by
bold line.
• <<optional relation>> specifies optionality be-
tween objects, actors. It is represented by dashed
line.
• <<Xor
relation>> indicates an alternative rela-
tion between objects, actors (ifelse). It is repre-
sented by solid line.
• <<Feature Name>> specifies in which feature
the tagged object/actor is present.
4 SPL DESIGN CONSTRUCTION
FOR REAL-TIME
RECONFIGURABLE
SCHEDULING
Besides the SPL-UML Marte profile definition, our
second contribution consists in the adaptation of the
SPL design process of (Maazoun et al., 2013)through
the addition of an intelligent agent (IA). This latter
derives from a set of unfeasible tasks’ parameters a
feasible configuration that is considered as one prod-
uct of the SPL. In other words, our SPL factorizes the
commonalities and variability among the harmonized
task set parameters; it represents a family of feasi-
ble reconfigurations. That is, any reconfiguration that
is derivable from the SPL (while respecting the SPL
constraints) can be used as a new feasible reconfigu-
ration of the failed system.
In this section, we will first present the extrac-
tion of the feature model and design corresponding to
the SPL for real-time reconfigurable scheduling. Sec-
ond, we illustrate the approach through an example
we constructed with our tool SPL-design tool for SPL
extraction.
4.1 Feature Model and Design
Extraction
Our bottom-up process extracts, from the task set pa-
rameters of multiprocessors embedded systems, the
SPL design enriched with real-time constraints ex-
tracted from the feature model. Similar to the original
process (Maazoun et al., 2013), our process operates
in the following four steps:
1. Name Harmonization. This pre-processing step
identifies the semantic correspondences among
the names of packages, classes, methods and at-
tributes names through interrogating WordNet.
The semantic relations are examined in the fol-
lowing order: the equivalence (Synonyms), the
string extension (str
extension), and then the gen-
eralization (Hypernyms)(Maazoun et al., 2013).
At the end of this step, all semantically related
names would be harmonized and can then be an-
alyzed through the FCA in the features identifica-
tion step.
2. Reverse Engineering. In the second step, the ap-
proach reverse engineers the code to construct the
class and sequence diagrams required in the fea-
ture extraction step of our process. A class dia-
gram contains all classes and enumerates the rela-
tionships between them (association, inheritance,
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
172

composition, aggregation). A sequence diagram
contains Lifelines, message, operation, object...
3. Feature Model Extraction. In this step, the ap-
proach uses FCA and LSI to extract the common-
alities and variability among the harmonized task
set parameters. In our approach, the data repre-
sents the task set parameters being analyzed and
recalculated by the IA in order to handle real-
time requirements; the data description is repre-
sented through a table where the processors con-
stitute the rows while tasks and their states (pack-
ages, classes, methods, attributes) constitute the
columns of the table. From this table, a con-
cept lattice is derived. The concept lattice first
allows the definition of commonalities and vari-
ations among all processors: The top element of
the lattice indicates that certain objects have ele-
ments in common (i.e., common elements), while
the bottom element of the lattice show that certain
attributes fit common objects (variations). Com-
mon blocks and blocks of variation are composed
of atomic blocks of variation representing only
one feature. Besides the blocks, the lattice also
indicates the relationships among elements. The
Mandatory, Optional, Xor, Require and AND re-
lationships can be automatically derived from the
sparse representation of the lattice and presented
to the analyst.
In our work, we suppose that the task set parame-
ters, recalculated by the IA, are implemented by
different developers. Consequently, the proces-
sors may have different structures. For example, a
class in one processor can be replaced in a second
processor with two classes where the attributes
and methods of the original class are distributed.
Moreover, since all the processors belong to the
same embedded system, there are semantic rela-
tionships among the words used in the names. To
define the similarity, we apply LSI. It allows to
measure the similarity degree between names for
packages, classes, methods and attributes. Conse-
quently, the approach uses LSI and FCA to iden-
tify features based on the textual similarity. LSI
uses each line in the block of variations as a query
to retrieve all lines similar to it, according to a
cosine similarity that equals to 0.70 (Binkley and
Lawrie, 2011). The result of LSI used as input
parameters for the FCA to group the similar tasks
based on the lexical similarity and on the feasi-
bility criteria. Thus, any task that hasn’t a simi-
lar task feasibility criteria will be ignored. This
process permits to identify atomic blocks of vari-
ations (Feature).
The next step in our process determines the hierar-
chy and constraints among features and finalizes
the feature model construction. This phase has
two-fold motivations. First, the features which
are composed of many elements (tasks) (package,
classes, attributes, methods) are renamed based on
the frequency of the names of tasks. In addition,
the organization and structure of the features are
also retrieved based on the semantic criteria. In
fact, to retrieve the organization of the features,
we use the semantic criterion:
• Hypernyms(FeatureN1, FeatureN2) −→ Fea-
tureN1 is the parent of FeatureN2
• Str extention(FeatureN1, FeatureN2) −→ Fea-
tureN1 OR FeatureN2
• Synonyms(FeatureN1, FeatureN2) −→ Fea-
tureN1 XOR FeatureN2
In fact, Hypernyms allow to construct the hi-
erarchy of feature models and Str
extention
and Synonyms permit to determine constraints.
Finally, the constraints between the different
features that are extracted with FCA and LSI
are verified and some others are added based
on the semantic criteria and on the real-time
properties. At the end of this last step, all the
features would be collected by the IA in a feature
model to specify the variations between the task
set parameters.
4. Design Elements Extraction and SPL Design
Extraction. The organization and structure of the
SPL design is retrieved based on the following
construct rules:
• R1. Each mandatory class will be pre-
sented with her mandatory elements (attribute,
method).
• R2. If a relationship is mandatory, then the
association ends are mandatory and it will be
present in the design.
• R3. If a relationship has a startAssociation or
an endAssociation mandatory, will be present
in the design and the optional startAssociation
or endAssociation will be present and stereo-
typed ”recommended”.
• R4. The rest of the optional element will be
present in the design according to the degree of
its presence in all the class’ diagrams.
Finally, the IA proposes to represent the design
of the SPL using our UML Marte profile enriched
with the information and real-time constraints ex-
tracted from the feature model generated in order
to re-obtain the feasibility of the embedded sys-
tems under study.
AReal-timeSchedulingofReconfigurableOSTaskswithaBottom-upSPLDesignApproach
173
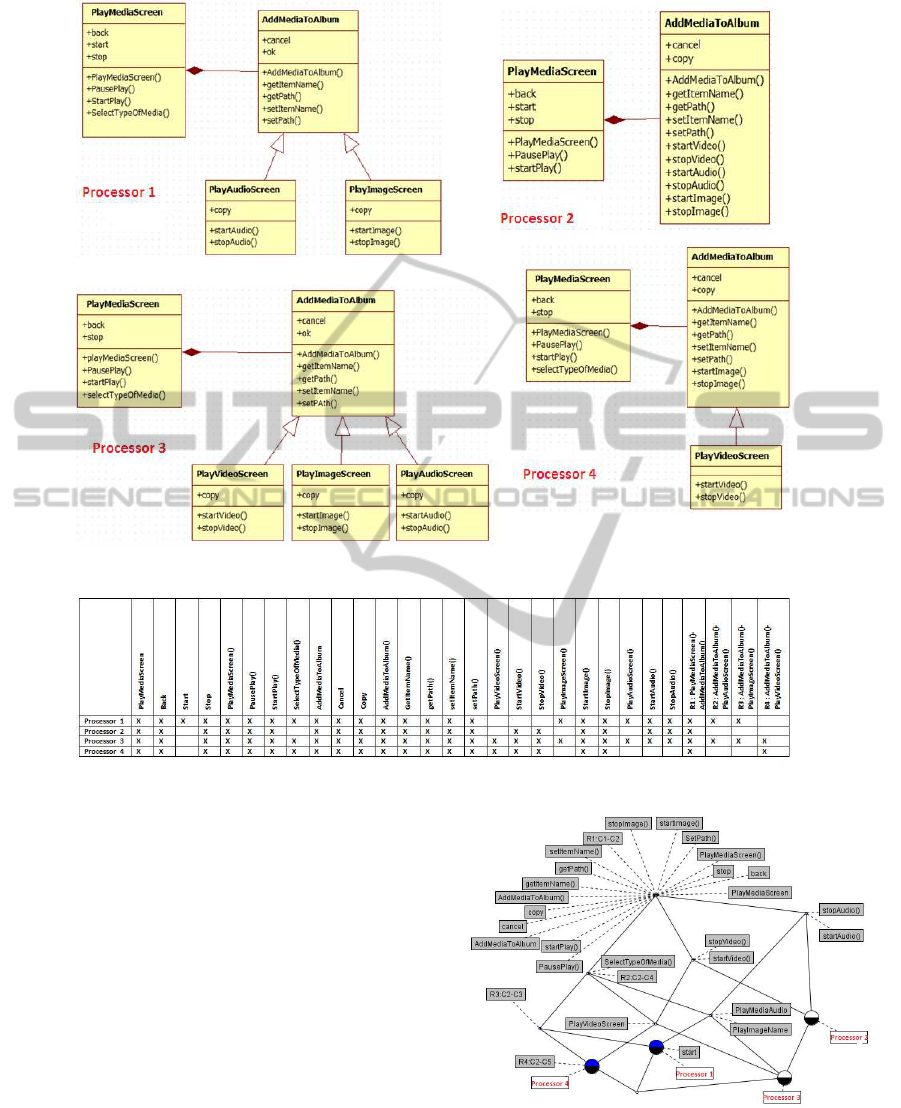
Figure 1: Class diagrams of four processors.
Figure 2: Extract of the formal context describing mobile systems by class diagram elements.
4.2 Example
To illustrate our adaption of the SPL construction, let
us consider a set of mobile phone software products.
In the first step, the user chooses the source code file,
then the design tree will be extracted and saved in
an XML document. The XML document contains
to the name of elements of the parsed code (pack-
ages, classes, methods, attributes). To extract the
class and sequence diagrams, we reverse engineered
the code. The class diagram of products after reverse
engineering is shown in figure 1. In order to tolerate
some differences among the class diagram, we apply
the FCA to analyze elements of class diagrams. The
data description is represented through a table where
the processors constitute the rows, while the classes
diagrams elements (packages, classes, methods, at-
tributes) and relationship between classes constitute
the columns of the table (see figure 2). After that,
Figure 3: The lattice for the formal context.
a concept lattice is derived (see figure 3). This later
defines the commonalities and the task set variations
among all processors. The top elements of the lattice
indicate that some objects have features in common.
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
174
These latter are mandatory in the class diagram, how-
ever, the others are optional. Applying FCA, LSI and
semantic criteria, all atomic blocks are identified and
collected in a feature model to specify the variations
between these processors (Maazoun et al., 2013).
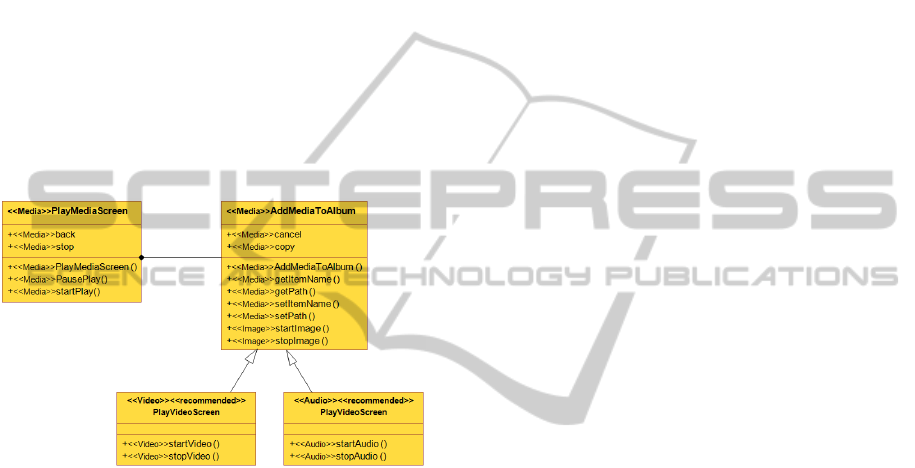
In the second step, we perform the SPL de-
sign construction. In fact, all mandatory classes
will be present with their mandatory methods
and attributes. In the mobile phone exam-
ple, the class ”PlayMediaScreen” and its attributes
(tasks) ”back” and ”stop” and methods ”PlayMedi-
aScreen()”,”PausePlay”, ”startPlay” are mandatory.
Then, all mandatory relationship will be presented
like ”R1:C1-C2” (see figure 2). Every relationship
having an associationEnd mandatory will be pre-
sented like ”R2:C2-C4” and ”R3:C2-C3”. Finally,
the class and sequence diagrams corresponding to the
SPL is derived (see figure 4).
Figure 4: The class diagram of the SPL represented with
SPL-UML Marte.
Now, the IA applies these output results as in-
put parameters to the embedded system under study
and consequently the performance of the real-time
scheduling becomes more efficient. Indeed, the intel-
ligent agent should define the different solutions gen-
erated by the SPL feature model as input parameters.
In this case, the best solution that satisfies functional
requirements and gives the minimum utilization fac-
tor of the system was chosen. This solution amelio-
rates also the response time and hence the chances
of executing more new tasks are increased as well.
These results were suggested by the tool RT-Reconfig
and give a feasible system which is proven also by the
real-time simulator Cheddar (Singhoff et al., 2004).
5 CONCLUSION
In this paper, we first reviewed existing works for
reconfigurable homogeneous multiprocessor systems
to be implemented by sporadic and periodic OS
tasks that should meet real-time constraints. In this
work, we propose to use an optimal scheduling al-
gorithm based on the EDF principles and on the dy-
namic reconfiguration for the minimization of the re-
sponse time of constrained deadline real-time tasks
and proven it correct. Secondly, we proposed how
a Software Product Line (SPL) design approach can
be used to produce various feasible reconfigurations
(based on EDF); these latter can reused when needed
to dynamically reconfigure a failed system. The pro-
posed process starts from the current tasks’ param-
eters to identify a product line in a bottom-up ap-
proach. Our new original approach extracts from
the unfeasible embedded system, the SPL design en-
riched with real-time constraints presented by the crit-
ical embedded systems. The enriched SPL is modeled
with a UML Marte profile that assists in the compre-
hension, reconfiguration as well as evolution of the
SPL in order to satisfy real-time requirements.
Finally and in our future works, we are examin-
ing how to take advantage of the SPL-UML Marte
notation to propose a maintenance process for SPL
with the Reconfigurable real-time embedded systems.
We plan also in future works to study reconfigurations
of real-time tasks of distributed embedded systems to
define a new Software Product Lines satisfying real-
time requirements.
REFERENCES
Al-Msie’Deen, R., Seriai, A., Huchard, M., Urtado, C.,
Vauttier, S., and Salman, H. (2012). An approach
to recover feature models from object-oriented source
code. In Day Product Line 2012.
Binkley, D. and Lawrie, D. (2011). Information retrieval
applications in software maintenance and evolution.
In Encyclopedia of Software Engineering, pages 454–
43.
Brocal, V., Balbastre, P., Ballester, R., and Ripoll, L.
(2011). Task period selection to minimize hyper-
period, Emerging Technologies & Factory Automa-
tion (ETFA), IEEE conference on, pp.1-4, 2011. doi:
10.1109/ETFA.2011.6059178, Toulouse, France, 16th
edition.
Buttazzo, G. and Stankovic, J. (1993). RED: Robust Earli-
est Deadline Scheduling. Int. Workshop On Respon-
sive Computing Systems, Austin, 3rd edition.
Dertouzos, M. (1974). Control Robotics: The Procedural
Control of Physical Processes. Proceedings of the
IFIP Congress.
Gharsellaoui, H., Khalgui, M., and Ahmed, S. B. (2012).
Feasible Automatic Reconfigurations of Real-Time
OS Tasks. IGI-Global Knowledge, USA, isbn13:
9781466602946 edition.
Kang, K., Cohen, S., Hess, J., Novak, W., and Peterson, A.
(1990). Feature-oriented domain analysis (foda) fea-
AReal-timeSchedulingofReconfigurableOSTaskswithaBottom-upSPLDesignApproach
175

sibility study,. Technical report CMU/SEI-90-TR-21,
Software Engineering Institute,Carnegie Mellon Uni-
versity,.
Legrand, J. and Singhoff, L. (2004). Cheddar : a Flexible
Real Time Scheduling Framework. ACM SIGAda Ada
Letters, volume 24, number 4, pages 1-8. Edited by
ACM Press, ISSN:1094-3641.
Maazoun, J., Bouassida, N., Ben-Abdallah, H., and Seriai,
A. (2013). Feature model extraction from product
source codes based on the semantic aspect. Reyk-
javik, Iceland. Proceedings of the 8th International
Joint Conference on Software Technologies.
She, S., Lotufo, R., Berger, T., Wesowski, A., and Czar-
necki, K. (2011). Reverse engineering feature models.
pages 461–470.
Singhoff, F., Legrand, J., Nana, L., and Marce., L. (2004).
Cheddar : a flexible real time scheduling framework.
ACM SIGAda Ada Letters, volume 24, ACM Press,
New York, USA. December 2004, ISSN:1094-3641. F.
Singhoff and A. Plantec. What is Cheddar, at AADL
scheduling home site.
Ziadi, T. (Decembre, 2004). Manipulation de lignes de pro-
duits en uml. These de doctorat, Universite de Rennes
1.
Ziadi, T., Frias, L., da Silva, M. A. A., and Ziane, M. (2012).
Feature identification from the source code of product
variants. pages 417–422.
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
176
