
An Experimental Study of Visual Tracking in Surgical Applications
Jiawei Zhou and Shahram Payandeh
Experimental Robotics and Imaging Laboratory, School of Engineering Science, Simon Fraser University,
Burnaby, BC, Canada
Keywords: Visual Tracking, Minimally Invasive Surgery, Adaptive Gaussian Mixture Model, Particle Filter.
Abstract: Tracking surgical tools in mono-endoscopic surgery can offer a conventional (non-robotics) application of
this type of procedure a versatile surgeon-computer interface. For example, tracking the surgical tools can
enable the surgeon to interact with the overlaid menu which allows them to have access to medical information
of the patient. Another example is the capability that such tracking can offer where the surgeon through
surgical tool can manually register per-operative images of the patient approach on the surgical site. This
paper presents the results of some of the tracking schemes which we have explored and analysed as a part of
our studies. Tracking framework based on both Gaussian and non-Gaussian framework are explored and
compared. Although majority of the approaches can offer a robust performance when used in the real surgical
scene, the method based on Particle Filter is found to have a better success rate. Based on these experimental
results, the paper also offers some discussions and suggestions for future research.
1 INTRODUCTION
The research and development in computer-aided
surgical application can dramatically promote the
delivery and training of modern medicine. For
example, image guided surgical navigation can assist
the surgeons in performing minimally invasive
surgery (MIS) through tiny incisions. Moreover, a
computer-based simulation system with Augmented
Reality (AR) is able to offer a safe and realistic
learning environment to medical students instead of
using a real-life context. The critical part for these
applications is the implementation of a user computer
interactive system (UCIS) based on surgical
requirements.
To avoid unnecessary physical contact with the
environment, some research groups have focused on
the development of a gesture-based UCIS. In this kind
of UCIS, the standard user computer interaction
devices, such as mouse and keyboard, are replaced
with sensing devices (e.g. Microsoft Kinect sensor)
which can capture the motion and the hand gestures
of the user in the workspace (Gallo et al. 2011;
Ruppert et al. 2012). Another kind of UCIS integrates
AR technology into surgical and medical
requirements. These UCISs are able to superimpose
the medical image data or 3D virtual medical model
directly onto the view of the surgeon and to spatially
register the image or model of the patient (Navab et
al. 2007; Su et al. 2009).
Although a number of robotic surgical systems
with 3D stereo cameras have been developed to assist
the surgeon during MIS, most hospitals still prefer
utilizing a traditional and non-robotic surgical system
with a monocular camera due to limited budgets. This
paper is focused on the enhancement of such non-
robotic monocular MIS set-ups. In the previous work,
a real-time interactive system for a non-robotic
monocular endoscope MIS was developed to enhance
the practice of MIS training without adding extra
hardware to the existing setup (Sun 2012). In this
system, the surgical instrument is being considered as
the input control variable so a robust tracking
algorithm is important to localize the instrument in
the field of view.
To achieve an accurate position of the surgical
tool, a number of challenges must be overcome.
These challenges include limited measured
information from endoscopic video signals, the
complexity of the surgical scene, reflection of light,
occlusion of surgical tools and so on. To cope with
these problems, a number of research groups attach
specific markers on the surgical instrument to help
with the tracking (Tonet et al. 2007) and others utilize
segmentation techniques and feature detection to
assist tracking (Doignon et al. 2005; Cano et al.
2008).
608
Zhou J. and Payandeh S..
An Experimental Study of Visual Tracking in Surgical Applications.
DOI: 10.5220/0005346506080613
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 608-613
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

For both marker-based and marker-less tracking
methods, the information from an image is not
enough to obtain a reliable result. Instead, the
information contained in a sequence of images should
be taken into account to improve the accuracy of the
tracking. To estimate the position of the surgical tool,
we introduced some probability based estimators,
such as the Kalman Filter (KF) and the Extended
Kalman Filter (EKF) to the visual tracking system in
the previous work (Zhou & Payandeh 2014). The
application of these estimators is able to return more
accurate and reliable tracking results. This paper is a
further development of the experimental study based
on the previous visual tracking work. An adaptive
Gaussian Mixture Model (AGMM) method is
implemented to track the surgical instrument under
the assumption of Gaussian background components.
Moreover, to explore better tracking performance for
surgical application, a more general tracking scheme
based on Particle Filter (PF) is presented. This
framework is further combined with the AGMM as
the Hybrid approach to provide 2D feature
information for the tool during tracking. These
methods are experimentally evaluated in both an in-
vitro scene and an in-vivo setting, and also compared
with the results from the previous work.
2 METHODS
In this section, we present an overview of three visual
tracking approaches for MIS instrument localization.
A Gaussian-type tracking method based on AGMM
is firstly introduced, followed by a more general PF
tracking scheme with a weight-based resample
strategy. To explore better tracking performance, a
Hybrid approach which combines the PF framework
and the AGMM is also implemented.
2.1 AGMM Method
To detect a moving object in image sequences, one
type of tracking methods is based on background
subtraction. The AGMM method is a successful
application in the visual tracking field. The basic idea
for the AGMM is to set up a background model which
can be used to distinguish the foreground object from
background environment. The region of the moving
object is highlighted by calculating a reference image
and subtracting each new frame from this reference
image. The AGMM was originally proposed in (Stau
& Romano 1998) and was further developed by
introducing a shadow detection scheme
(Kaewtrakulpong & Bowden 2002). Our laboratory
has successfully applied the AGMM method in a
people surveillance system (Dai 2012). In this paper,
we use the AGMM to track the moving surgical tool.
In the AGMM, the pixel values in the scene
background are modelled using a mixture of adaptive
Gaussian components. Given an arbitrary pixel value
t
x
, the
ith
Gaussian density function at time
t
is
2
,,
(, , )
titit
x
with a mean value
,it
and a standard
deviation
,it
. The probability of a particular pixel
0
p
having value
t
x
is defined as
2
,,,
1
() (, , )
k
t it t it it
i
Px w x
(1)
where
,it
w
is the weight for the
ith
Gaussian
component and
k
is the number of components. To
cope with slight changes in the background, such as
changing illuminants, an adaptive background model
is necessary. To allow a foreground object to become
part of the background later, the Gaussian distribution
having the lowest weight is replaced with a new
Gaussian function. This new Gaussian component is
given a low normalized weight which will be used in
the time
1t
. Meanwhile, the mean and variance of
the other remaining Gaussian components for the
time
1t
are also updated.
To deal with the shadow noise in the returned
foreground object region, a shadow elimination step
is added to the output of AGMM. Some
morphological operations such as opening and
closing are also applied to the shadow detected image.
After these post-processing steps, the contour of the
moving surgical instrument is accurately extracted
frame by frame.
2.2 PF Tracking Framework
The idea of the PF is to generate a group of weighted
samples (particles) to approximate the posterior
probability density function (PDF). These particles
are weighted according to the weighting function.
This function is created based on the measurement
from the image data. Generally, higher weights are
given to more reliable particles. If the number of
particles are large enough, we can recover the
unknown posterior PDF for the state-space using its
approximation after several iterations. Since the PF
method does not assume any linearity of the system
or Gaussian noise distributions, it is widely used to
track objects in general and medical applications
(Tehrani Niknejad et al. 2012; Ito et al. 2013). In the
previous work, a colour-based PF method was used
to track a coloured marker in the emulated surgical
AnExperimentalStudyofVisualTrackinginSurgicalApplications
609

scene (Sun 2012). In this paper, a modified PF
framework is used to determine the possible region
for the moving surgical instrument.
For our tracking problem, the target object is
selected to be the rectangle region
Rec
which
indicates the possible area for the surgical tool. The
state vector
X
at the current time
t
is described as
[,,,,,,,]
T
tCCCCRRRRt
Xxyxywhwh
where
(, )
CC
xy
is the coordinate of the rectangle center.
R
w
and
R
h
are the width and height of the rectangle.
C
x
and
C
y
are its instantaneous velocities along the x
and y directions respectively.
R
w
and
R
h
are the
instantaneous change of width and height. To
measure the similarity of the target and the particles,
we choose the colour distribution in the HSV space as
the tracking metric since the region of the instrument
tends to have more dark or bright components than
other regions. By calculating the 2D Hue-Saturation
colour histogram from various areas, we can find
those areas containing the same object owing to their
similar colour distributions.
The PF consists of prediction and update phases.
The particles at current time
t
are first propagated
from particles at time
1
t
according to a first-order
auto-regressive system dynamic model. In the update
phase, we compare the 2D colour histogram of each
sample area with the reference histogram. The
reference one is calculated in the initialization step.
The weighting function is designed based on the
histogram similarity. Higher weights are given to
those areas with similar colour distribution to the
reference region. From the predicted particles and
their normalized weights, we can estimate the
possible region for the moving surgical instrument
using their expected value.
To avoid the degeneracy problem in PF, we use
an adaptive resampling strategy to eliminate particles
with low weights. We first sort the predicted particles
in a descending order according to their weight values
so the particles with higher weights have the priority
to be chosen. To generate the new particle set, we take
the first element from the particle queue and make
update
n
copies of it in the new particle set. The number
update
n
is calculated from
1
[] min( Z| [])
[]
update update
m
update
j
nj hhnj
njN
(2)
where
m
is the number of elements we selected from
the particle queue. Figure 1 illustrates an example of
weighted-based resampling. The original particle set
has 5 particles indicated in different colours. The
height represents its weight. In (b), the particles are
organized in a descending order. After resampling,
the new particle set contains the copies from those
particles with high weights (green, blue and gray
ones). The particles with low weights (red and
orange) are removed from the particle set.
Figure 1: Illustration of the weight-based resample strategy.
(a) Original particle set. (b) Ordered particle queue. (c) New
particle set.
2.3 A Hybrid Method
The AGMM method is able to detect the moving
foreground object in a stable background but it may
fail tracking if the background or the viewing
condition is changing. The PF approach can be used
for more general surgical scenes. However, it requires
the initial state vector, usually obtained from the user.
To overcome these two drawbacks, a hybrid method
integrating the PF and the AGMM is presented. After
we get the estimated region from the PF framework,
2D feature detection is applied within the region so
that the tip and two edges of the instrument can be
returned.
For a given video stream, we assume that the
backgrounds in every constant short time period (e.g.
1~2s) are relatively stable so that the AGMM is able
to detect the moving object. Before we start the PF
part, the AGMM is first applied to determine the
initial position of the moving surgical tool and returns
a rectangular region containing the tool. We use this
rectangular region to compute the reference
histogram and to generate particles in the
initialization of the PF. After the initialization, the PF
is responsible for the surgical tool tracking as stated
in Section 2.2. If the tracking is lost, the AGMM is
applied again to relocate the rectangular region that
encloses the initial position of surgical tool, and the
PF is re-initialized. After we obtain the region of
interest from the PF, we use the feature detection
method to find the tool’s tip position. The details for
the feature detection can be referred to the previous
work (Sun 2012).
(a) (b) (c)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
610

3 EXPERIMENTAL RESULTS
To evaluate the performance of all the three tracking
methods we have presented (AGMM, PF, and the
Hybrid one) for surgical and medical usage, the
experiments were conducted under an in-vitro
training environment and an in-vivo environment.
The in-vitro training cases were captured from the
surgical emulated setup in our laboratory (Sun 2012).
For in-vivo surgical experiments, we used several
surgical video clips from the online video atlas of Dr.
Julio Alejandro Murra Saca Medical Clinic
(see
reference for the website). All the results are also
compared with the KF and EKF methods which are
proposed in the previous work (Zhou & Payandeh
2014).
3.1 Tracking in in-vitro Training
Environment
In this part of the experiments, we assume the
endoscope is stationary and the background is rarely
changing (i.e. as a part of the surgical training
environment). First of all, we tested the tracking of a
moving surgical tool in the ideal scene. For this type
of scene, there are no objects in the background. In
the next stage, to simulate the surgical environment,
we test the tool tracking in a more complex scene. The
ideal background is replaced with a training
abdominal cavity model. Due to the hardware and
software limitations, only the KF approach is tested
in real-time and the other methods are tested offline.
The tracking results for all the methods are
demonstrated in Figure 2. For the KF approach, it
returns the 2D features of the tool including the tool’s
edges, midline and tip. The EKF method is able to
detect two edges of the tool. The AGMM and PF
methods indicate the region containing the moving
surgical tool. The Hybrid method can detect the 2D
features of the tool based on the interest region.
3.2 Tracking in in-vivo Surgical
Environment
For the in-vivo experiments, we used 10 endoscopic
video clips captured from the real surgical scenes.
Each of them lasts for about 10s containing 200~300
frames. In these initial experiments, we focus on the
scenes with short duration where the motion of
instrument is slow and smooth without rapid change
in orientation, scale and position. The example of
tracking results are displayed in Figure 3.
Figure 2: The tracking results of all the five methods in the
in-vitro training environments. The 1
st
column shows the
results in ideal scene and the 2
nd
column displays the results
in emulated scene. Each row corresponds to different
methods. From top to bottom, they are using the KF, EKF,
AGMM, PF and Hybrid approach respectively.
To evaluate the tracking performance of each method,
we select the tracking success rate, defined as the
number of tracked frames per 200 frames, as the
criterion for tracking performance. The tracking
success rates for all the five tracking approaches
under both the in-vitro training environment and the
(a)
(b)
(c) (d)
(e)
(f)
(g)
(h)
(i)
(j)
AnExperimentalStudyofVisualTrackinginSurgicalApplications
611
in-vivo real surgical environment are listed in Table
1. The in-vitro training environment is composed of
the ideal scene and emulated scene. The in-vivo
environment includes 10 surgical scenes labelled
from video No.1 to video No.10. For the videos No.1,
No.2, No.3, No.5 and No.6, the surface of the tool is
dark and matt. For videos No.4 and No.7, the tool is
made of a metallic material. Video No.8 involves
multiple tool tasking. In video No.9, the tool is
moving at a fast speed and video No.10 has a complex
background.
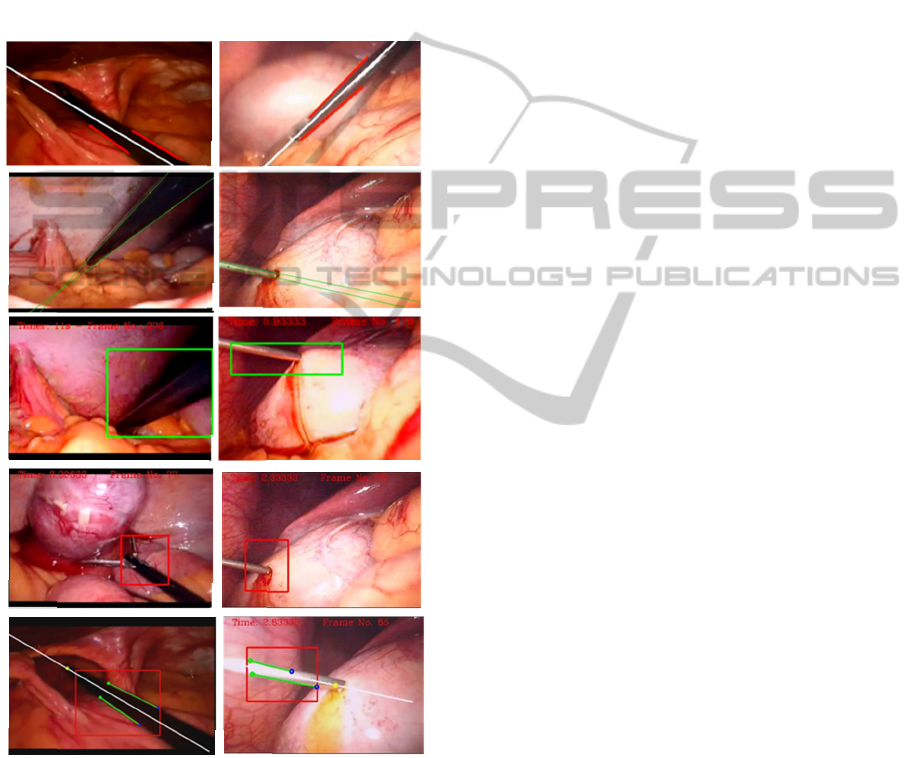
Figure 3: Examples for the tracking results of all the five
methods in the real surgical scenes. Each row corresponds
to different methods. From top to bottom, they are using the
KF, EKF, AGMM, PF and Hybrid approach respectively.
4 DISCUSSION AND
CONCLUSION
In this paper, we have proposed experimental studies
of various visual tracking techniques for MIS and
related training. The tracking performance of all the
methods (AGMM, PF and the Hybrid one), is
evaluated under different environments. For the in-
vitro experiment including the ideal scene and
emulated scene, they all have successful performance
when tracking single surgical instrument. In the
previous work, the KF and EKF methods perform
well when the instrument moves slowly and the
background is clean but they are sensitive to the noise
from the background. Compared to the KF and EKF
methods, the methods presented in this paper are
more robust with respect to such noises as long as the
background is stable or has only a slight change.
However, all the methods have limitations when
coping with the real surgical scene. The AGMM
method is able to keep tracking under a stable
background but it cannot deal with the situation when
the background changes rapidly. The PF method has
the best tracking results in comparison with all the
other methods even though it fails in the complex
surgical scene and the fast tool motion. However, the
manual initialization may lead to errors when the
initial region has a similar colour histogram with
another area in the background. The Hybrid method
works well in the in-vitro environment without
manual initialization and is able to come back from
the lost tracking situation. Based on the tracked
region, it is able to provide the tool’s feature
information even if the tracked region just covers a
small part of the tool. Nevertheless, the Hybrid
method cannot be applied to real surgical scenes due
to its unreliable initialization. Due to the motion of
both the background and the surgical tool, the
AGMM easily gives wrong information to the PF
framework which may lead to tracking failure.
In spite of the fact that none of the tracking
methods in our experimental study can be used as a
practical solution for the general surgical tool
tracking problem, these methods have shown their
possibility in a stable working condition which is the
case for the surgical training box. Based on the results
from our experimental study, a more robust tracking
approach can still be developed using the PF
framework. To obtain more reliable tracking results,
a new measurement is required to consider both the
colour distribution and feature information of the
moving tool. A better detection algorithm is also
needed to find the location of the tool’s tip. One
possible solution is to include the tip location into the
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
(i)
(j)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
612

Table 1: The tracking performance of the KF, EKF, AGMM, PF and Hybrid method under various experimental environments.
Method
Tracking Success Rate (frames/200 frames *100%)
KF EKF AGMM PF Hybrid
Ideal Scene
90% 80% 98% 80% 83%
Emulated Scene
86% 70% 96% 90% 92%
Video No.1
30% 48% 42% 45% 20%
Video No.2
48% 33% 53% 50% 15%
Video No.3
52% Fail 38% 60% Fail
Video No.4
Fail 50% 55% 67% 40%
Video No.5
45% 31% 48% 65% 50%
Video No.6
20% 18% 23% 56% 17%
Video No.7
Fail Fail 10% 58% 10%
Video No.8
Fail Fail Fail 53% Fail
Video No.9
Fail Fail Fail Fail Fail
Video No.10
10% Fail 12% 15% Fail
state vector to minimize the error in feature detection.
Moreover, to realize the automation of the tracking,
the PF framework needs a more reliable initialization
strategy.
REFERENCES
Cano, A. M. et al., 2008. Laparoscopic Tool Tracking
Method for Augmented Reality Surgical Applications.
In 4th International Symposium, ISBMS , Proceedings.
pp. 191–196.
Dai, X., 2012. Intelligent People Surveillance
Framework.Master Thesis, Simon Fraser University.
Doignon, C., Graebling, P. & de Mathelin, M., 2005. Real-
time Segmentation of Surgical Instruments inside the
Abdominal Cavity using a Joint Hue Saturation Color
Feature. Real-Time Imaging, 11(5-6), pp.429–442.
Gallo, L. et al., Controller-free Exploration of Medical
Image Data : Experiencing the Kinect. In 2011 24th
International Symposium on Computer-Based Medical
Systems (CBMS). Bristol: IEEE, pp. 1–6.
Ito, T., Anzai, D. & Wang, J., 2013. A Modified Particle
Filter Algorithm for Wireless Capsule Endoscope
Location Tracking. In Proceedings of the 8th
International Conference on Body Area Networks. pp.
536–540.
Kaewtrakulpong, P. & Bowden, R., 2002. An Improved
Adaptive Background Mixture Model for Real- time
Tracking with Shadow Detection. Video-Based
Surveillance Systems. Springer US, pp.135–144.
Navab N, Feuerstein M, B. C., 2007. Laparoscopic Virtual
Mirror New Interaction Paradigm for Monitor Based
Augmented Reality. In Virtual Reality Conference,
VR’07. IEEE. pp. 43–50.
Ruppert, G. C. S. et al., 2012. Touchless Gesture User
Interface for Interactive Image Visualization in
Urological Surgery. World Journal of Urology, 30(5),
pp.687–91.
Stau, W. E. L. G. C. & Romano, R., 1998. Using Adaptive
Tracking to Classify and Monitor Activities in a Site.
Computer Vision and Pattern Recognition, 1998.
Proceedings. IEEE Computer Society Conference on.,
2.
Su, L.-M. et al., 2009. Augmented Reality during Robot-
assisted Laparoscopic Partial Nephrectomy: toward
Real-time 3D-CT to Stereoscopic Video Registration.
Urology, 73(4), pp.896–900.
Sun, X., 2012. Image guided interaction in minimally
invasive surgery. Master Thesis, Simon Fraser
University..
Tehrani Niknejad, H. et al., 2012. On-Road Multivehicle
Tracking Using Deformable Object Model and Particle
Filter With Improved Likelihood Estimation. IEEE
Transactions on Intelligent Transportation Systems,
13(2), pp.748–758.
Tonet, O. et al., 2007. Tracking Endoscopic Instruments
without a Localizer: A Shape-analysis-based Approach.
Computer Aided Surgery, 12(1), pp.35–42.
Zhou, J. & Payandeh, S., 2014. Visual Tracking of
Laparoscopic Instruments. Journal of Automation and
Control Engineering Vol, 2(3), pp.234–241.
Julio Alejandro Murra-Saca MD. Notes on Cyber
Gastroenterology, [Online]. Available: http://
www.murrasaca.com/Laparoscopic.htm.
AnExperimentalStudyofVisualTrackinginSurgicalApplications
613
